Джеймс С. Альбус
Эта статья может чрезмерно полагаться на источники, слишком тесно связанные с предметом , что потенциально препятствует тому, чтобы статья была проверяемой и нейтральной . ( декабрь 2013 г. ) |
Джеймс Сакра Альбус | |
|---|---|
 Джеймс С. Альбус, ок. 2000. | |
| Рожденный | 4 мая 1935 г. Луисвилл, Кентукки , США |
| Умер | 17 апреля 2011 г. (75 лет) |
| Альма-матер | |
| Занятие | Инженер |
| Работодатель | Национальный институт стандартов и технологий |
Джеймс Сакра Альбус (4 мая 1935 — 17 апреля 2011) — американский инженер , старший научный сотрудник NIST, основатель и бывший руководитель отдела интеллектуальных систем Лаборатории машиностроения Национального института стандартов и технологий (NIST).
Биография
[ редактировать ]Альбус родился в Луисвилле, штат Кентукки , и получил степень бакалавра физики в Уитон-колледже , штат Иллинойс, в 1957 году и степень магистра электротехники в Университете штата Огайо , Колумбус, в 1958 году. [1] В 1972 году он получил степень доктора философии. Имеет степень бакалавра электротехники в Университете Мэриленда, Колледж-Парк . [2]
С 1957 по 1973 год Альбус работал в НАСА, начиная с 1957 года в качестве инженера-физика в проекте «Авангард» в Военно-морской исследовательской лаборатории в Вашингтоне. С 1958 по 1969 год он был инженером-физиком в Центре космических полетов имени Годдарда НАСА , а с 1963 года исполнял обязанности руководителя отдела видеотехники. С 1969 по март 1973 года — начальник отдела кибернетики и разработки подсистем. [4] В 1960-х годах он был связан с ранней спутниковой программой «Вэнгард» и отвечал за оптические датчики аспекта на семи спутниках Годдарда, более чем десяти зондирующих ракетах, [1] и более 15 космических кораблей НАСА. [2]
С 1973 по 2008 год Альбус работал в Национальном бюро стандартов (NBS), которое в 1988 году сменило название на Национальный институт стандартов и технологий (NIST). С марта 1973 года по июнь 1980 года он был менеджером проекта по датчикам и технологиям компьютерного управления в NBS, где разработал модель нейронной сети арифметического компьютера модели мозжечка (CMAC). С июня 1980 года по январь 1981 года он возглавлял группу программируемой автоматизации в NBS и разработал архитектуру эталонной модели RCS для исследовательского центра автоматизированного производства. [4] С 1981 по 1996 год он возглавлял отдел робототехнических систем НИСТ. Здесь он основал подразделение робототехнических систем, разработал RoboCrane и множество приложений архитектуры RCS для DARPA, НАСА, ARL, Горнодобывающего управления США, Ford и General Motors. С 1995 по 1998 год в качестве руководителя отдела интеллектуальных систем NIST он руководил отделом из 35 профессиональных ученых и инженеров с бюджетом более 8 миллионов долларов в год. Он разработал архитектуру 4D/RCS для программы экспериментальных беспилотных автомобилей Demo III Армейской исследовательской лаборатории (ARL). С 1998 по 2008 год он был старшим научным сотрудником NIST Национального института стандартов и технологий (NIST). Обеспечивал техническое руководство отделом интеллектуальных систем и был главным исследователем по реализации проектов интеллектуальных наземных транспортных средств, финансируемых армией и DARPA. [4]
С июня 2008 по 2009 год он был старшим научным сотрудником Института перспективных исследований Краснова при Университете Джорджа Мейсона , Фэрфакс, Вирджиния , где работал над углублением понимания вычислительных и репрезентативных механизмов человеческого мозга. [4] С 2008 по 2011 год работал по совместительству в компаниях Robotic Technology Incorporated (RTI) и Robotic Research, LLC.
Он был членом редакционной коллегии Wiley Series on Intelligent Systems, входил в редакционные коллегии шести журналов, связанных с интеллектуальными системами и робототехникой: « Автономные роботы » , «Робототехника и автономные системы» , «Журнал робототехнических систем» , «Интеллектуальная автоматизация и мягкие вычисления ». [2]
В 1962 году он получил высшую денежную награду НАСА, присуждаемую на тот момент, за изобретение цифрового датчика солнечной ориентации . [1] В 1984 году он стал лауреатом премии Джозефа Ф. Энгельбергера в области робототехники. Он также получил несколько других наград за свою работу в области теории управления, в том числе премию NIST за прикладные исследования, золотую и серебряную медали Министерства торговли, премию Industrial Research IR-100, награду за заслуги перед президентом, премию Джейкоба Рабинова и премию Японии. Премия Ассоциации промышленных роботов за исследования и разработки. [2]
Работа
[ редактировать ]Альбус внес вклад в робототехнику мозжечка, разработал двуручную манипуляторную систему, известную как Робокрейн похожий на кран (вариант идеи платформы Стюарта, ), и предложил экономическую концепцию, известную как «Народный капитализм». [5] «Народный капитализм» аналогичен идеям Луи О. Келсо и обсуждает вопрос «как бы мы жили без работы?». Сам Альбус охарактеризовал влияние своих экономических идей как «незначительное». [4]
Видение Альбуса включало следующее: мир без бедности, мир процветания, мир возможностей, мир без загрязнения, мир без войны, и включало подробный план достижения этих целей.
Теория мозга
[ редактировать ]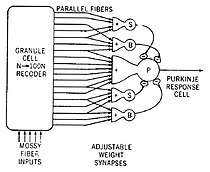

В 1971 году он опубликовал новую теорию функции мозжечка. [6] это изменило и расширило предыдущую теорию, опубликованную Дэвидом Марром в 1969 году.
Нейронные сети
[ редактировать ]На основе своей модели мозжечка Альбус изобрел новый тип нейросетевого компьютера — Контроллер артикуляции модели мозжечка (CMAC). [7] за что он получил награду IR-100 от журнала Industrial Research Magazine как одну из 100 самых важных промышленных инноваций 1976 года. [4]
РобоКран
[ редактировать ]Альбус изобрел и разработал новое поколение роботизированных кранов на базе шести тросов и шести лебедок, сконфигурированных как платформа Стюарта.
Система управления в реальном времени
[ редактировать ]
Альбус стал соавтором системы управления в реальном времени (RCS), архитектуры эталонной модели, которая использовалась на протяжении последних 25 лет. [ когда? ] для ряда интеллектуальных систем, включая Автоматизированный производственно-исследовательский центр NBS (AMRF), телеробототехнический сервис НАСА, проект DARPA по многократным автономным подводным аппаратам, систему оперативной автоматизации атомных подводных лодок, почтовое отделение общей почты, автоматизированное горное управление Горного управления. система, коммерческий контроллер станка с открытой архитектурой и многочисленные передовые робототехнические проекты, в том числе экспериментальный беспилотный наземный автомобиль Army Research Lab Demo III. [2]
В 1980-х годах архитектура эталонной модели Альбуса-Барбера (также известная как RCS — система управления в реальном времени) обеспечила фундаментальный принцип интеграции Автоматизированного исследовательского центра производства (AMRF) Национального бюро стандартов (NBS). Это был экспериментальный проект стоимостью 80 миллионов долларов. автоматизированная фабрика будущего. Проект финансировался совместно Программой производственных технологий ВМС США и Национальным бюро стандартов (NBS). Успех AMRF во многом стал причиной принятия Конгрессом законодательства, которое превратило NBS в NIST. [4]
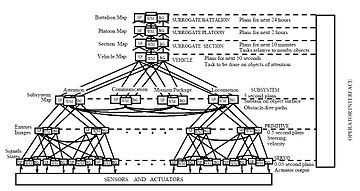
Вычислительная теория разума
[ редактировать ]Архитектура эталонной модели 4D-RCS — это эталонная модель для военных беспилотных транспортных средств, разработанная NIST, которая описывает, как следует идентифицировать и организовывать программные компоненты военных беспилотных транспортных средств. Альбус расширил эталонную модель до когнитивной архитектуры для интеллектуальных многоагентных систем. [8] Альбус (2009) описал:
Эта расширенная архитектура предназначена для обеспечения любого уровня интеллектуального поведения, вплоть до человеческого уровня эффективности управления транспортными средствами и координации тактического поведения между автономными воздушными, наземными и амфибийными системами транспортных средств. Он затрагивает фундаментальные теоретические вопросы относительно того, способны ли вычислительные процессы имитировать функциональные процессы в мозге, и обеспечивает теоретическую основу для понимания того, как механизмы мозга порождают процессы разума. Работа Альбуса привела к созданию биологически правдоподобной модели представления и вычислений в коре головного мозга человека. [4]
Публикации
[ редактировать ]Альбус опубликовал более 150 научных работ. [9] [10] журнальные статьи и правительственные исследованияпо интеллектуальным системам и робототехнике, а также автор или соавтор шести книг:
- 1976. Народный капитализм : экономика революции роботов . Книги Нового Света. ISBN 0-917480-01-5
- 1981. Мозг, поведение и робототехника . Байт/МакГроу-Хилл. ISBN 0-07-000975-9
- 2001. Инженерия разума: введение в науку об интеллектуальных системах . Уайли. ISBN 0-471-43854-5
- 2001. Справочник RCS: Инструменты для разработки программного обеспечения систем управления в реальном времени . Уайли. ISBN 0-471-43565-1
- 2002. Интеллектуальные системы: архитектура, проектирование и управление . Уайли. ISBN 0-471-19374-7
- 2011. Путь к лучшему миру: план процветания, возможностей и экономической справедливости . iUniverse. ISBN 978-1462035328
Ссылки
[ редактировать ]![]() Эта статья включает общедоступные материалы Национального института стандартов и технологий.
Эта статья включает общедоступные материалы Национального института стандартов и технологий.
- ^ Jump up to: а б с Авторы IEEE TRANSACTIONS ON SPACE ELECTRONICS AND TELEMETERY , сентябрь 1963 г. По состоянию на 2 августа 2009 г.
- ^ Jump up to: а б с д и Биографический очерк ДЖЕЙМС С. АЛЬБУС . Также см. https://www.nist.gov/el/ и http://www.james-albus.org/docs/CV_10_29_10.pdf . Доступ осуществлен в августе 2009 г. и ноябре 2010 г.
- ^ Джеймс С. Альбус: SEAC и начало обработки изображений в Национальном бюро стандартов. Архивировано 13 июля 2007 г. в Wayback Machine. Краткая биография из виртуального музея NIST. По состоянию на 2 августа 2009 г.
- ^ Jump up to: а б с д и ж г час БИОГРАФИЯ ДЖЕЙМСА С. АЛЬБУСА на isd.mel.nist.gov, 2009 г. Доступ на archive.org, 05.2015.
- ^ Джеймс С. Альбус (декабрь 2007 г.). «Народный капитализм — план процветания и экономической справедливости» (PDF) . Глобальная антология бизнеса и экономики . Я.
- ^ Альбус, Дж.С. (1971). « Теория функции мозжечка ». В: Математические биологические науки , том 10, номера 1/2, февраль 1971 г., стр. 25-61
- ^ Альбус, Дж.С. (1975). « Новый подход к управлению манипулятором: контроллер артикуляции модели мозжечка (CMAC) ». В: Труды журнала ASME по динамическим системам, измерениям и контролю , сентябрь 1975 г., стр. 220 - 227
- ^ Самсонович, Алексей В. « К единому каталогу реализованных когнитивных архитектур ». БИКА 221 (2010): 195–244.
- ^ Джеймс С. Альбус на DBLP библиографическом сервере
- ^ Scientific Commons: Джеймс Альбус . По состоянию на 2 августа 2009 г.
Внешние ссылки
[ редактировать ]- Доктор Джеймс Альбус. Архивировано 14 мая 2013 года на Wayback Machine James Albus.org.
- Джеймс С. Альбус из НИСТ
- О народном капитализме
- В Дом народного капитализма включен полный текст книги.
- Дом народного капитализма в Wayback Machine (архивировано 22 сентября 2011 г.)
- К новому миру с народным капитализмом на YouTube
- Часто задаваемые вопросы о народном капитализме на YouTube
- Народный капитализм: путь к изобилию Джеймс С. Альбус пишет в журнале h+
- 1935 рождений
- смертей в 2011 г.
- Американские инженеры
- Теоретики управления
- Выпускники инженерного колледжа Университета штата Огайо
- Американские робототехники
- Университет Мэриленда, выпускники Колледж-Парка
- Выпускники Уитон-колледжа (Иллинойс)
- Золотая медаль Министерства торговли
- Инженеры из Луисвилля, Кентукки