Формула вращения Родригеса
Эта статья включает список общих ссылок , но в ней отсутствуют достаточные соответствующие встроенные цитаты . ( Май 2021 г. ) |
В теории трехмерного вращения формула вращения Родригеса , названная в честь Олинде Родригеса , представляет собой эффективный алгоритм вращения вектора в пространстве с заданной осью и углом вращения . В более широком смысле это можно использовать для преобразования всех трех базисных векторов для вычисления матрицы вращения в SO(3) , группы всех матриц вращения, из представления оси-угла . С точки зрения теории Ли, формула Родригеса предоставляет алгоритм для вычисления экспоненциального отображения алгебры Ли so (3) в ее группу Ли SO(3) .
Эту формулу по-разному приписывают Леонарду Эйлеру , Олинде Родригесу или их комбинации. Подробный исторический анализ, проведенный в 1989 году, пришел к выводу, что эту формулу следует приписать Эйлеру, и рекомендовал назвать ее «формулой конечного вращения Эйлера». [ 1 ] Это предложение получило заметную поддержку, [ 2 ] но некоторые другие рассматривают эту формулу как лишь одну из многих вариаций формулы Эйлера-Родригеса , тем самым отдавая должное обеим. [ 3 ]
Заявление
[ редактировать ]Если v - вектор в ℝ 3 и k — единичный вектор, описывающий ось вращения, вокруг которой v поворачивается на угол θ в соответствии с правилом правой руки , формула Родригеса для повернутого вектора v rot равна

Интуиция приведенной выше формулы заключается в том, что первый член масштабирует вектор вниз, а второй искажает его (посредством сложения векторов ) в сторону нового положения вращения. Третий член повторно добавляет высоту (относительно ), который был потерян к первому члену.

Альтернативное утверждение состоит в том, чтобы записать вектор оси как векторное произведение a × b любых двух ненулевых векторов a и b , которые определяют плоскость вращения, а направление угла θ измеряется от a и к b . Обозначая α угол между этими векторами, два угла θ и α не обязательно равны, но они измеряются в одном и том же смысле. Тогда единичный вектор оси можно записать

Эта форма может быть более полезной, когда задействованы два вектора, определяющие плоскость. Примером в физике является прецессия Томаса , которая включает вращение, заданное формулой Родригеса, через две неколлинеарные скорости ускорения, а ось вращения перпендикулярна их плоскости.
Вывод
[ редактировать ]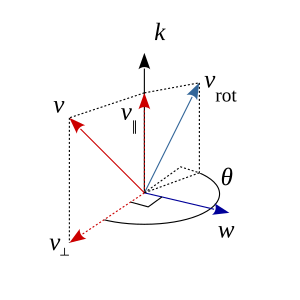

Пусть k — единичный вектор, определяющий ось вращения, и пусть v — любой вектор, который можно повернуть вокруг k на угол θ ( правило правой руки , против часовой стрелки на рисунке), создавая повернутый вектор. .

Используя скалярное и векторное произведение , вектор v можно разложить на компоненты, параллельные и перпендикулярные оси k :

где компонента, параллельная , называется векторной проекцией v k на k ,
- ,

а компонента, перпендикулярная , называется вектором отклонения v k от k :
- ,

где последнее равенство следует из формулы тройного произведения векторов : . Наконец, вектор является копией повернут на 90° вокруг . Таким образом, три вектора образуют правосторонний ортогональный базис , причем два последних вектора имеют одинаковую длину.






При вращении компонент параллельно оси не изменит ни величину, ни направление:


в то время как перпендикулярный компонент сохранит свою величину, но повернет свое направление в перпендикулярной плоскости, охватываемой и , в соответствии с


плоскими полярными координатами ( r , θ ) в декартовом базисе ex , e по аналогии с y :

Теперь полностью повернутый вектор:

Замена или в последнем выражении дает соответственно:




Матричное обозначение
[ редактировать ]Линейное преобразование на определяется векторным произведением задается в координатах путем представления v и k × v в виде матриц-столбцов :


![{\displaystyle {\begin{bmatrix}(\mathbf {k} \times \mathbf {v})_{x} \\(\mathbf {k} \times \mathbf {v})_{y} \\( \mathbf {k} \times \mathbf {v} )_{z}\end{bmatrix}}={\begin{bmatrix}k_{y}v_{z}-k_{z}v_{y}\\k_{z}v_{x}-k_ {x}v_{z}\\k_{x}v_{y}-k_{y}v_{x}\end{bmatrix}}=\left[{\begin{array}{rrr}0\ \,&-k_{z}&k_{y}\\k_{z}&0\ \,&-k_{x}\\-k_{y}&k_{x}&0\ \,\end{array}}\ right]{\begin{bmatrix}v_{x}\\v_{y}\\v_{z}\end{bmatrix}}\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94f43e2ace977072eb1aad482f660dfef56771b4)
То есть матрица этого линейного преобразования (по отношению к стандартным координатам) представляет собой матрицу векторного произведения :
![{\displaystyle \mathbf {K} =\left[{\begin{array}{rrr}0\ \,&-k_{z}&k_{y}\\k_{z}&0\ \,&-k_{x }\\-k_{y}&k_{x}&0\ \,\end{array}}\right]\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2155aade2be70f8132a0176db01bc89bf8ce0a86)
То есть,

Таким образом, последнюю формулу в предыдущем разделе можно записать как:

Сбор терминов позволяет компактно выразить

где

— матрица вращения на угол θ против часовой стрелки вокруг оси k , а I — 3 × 3 единичная матрица размером . [ 4 ] матрица R является элементом группы вращения SO(3) ℝ Эта 3 , а K — элемент алгебры Ли порождающая эту группу Ли (обратите внимание, что K кососимметричен, что характеризует ).

С точки зрения матричной экспоненты,

Чтобы убедиться в справедливости последнего тождества, заметим, что

характеристика однопараметрической подгруппы , т.е. экспоненциальная, и что формулы совпадают для бесконечно малых θ .
Альтернативный вывод, основанный на этой экспоненциальной зависимости, см. в экспоненциальной карте из к SO(3) . Об обратном отображении см. карту журналов от SO(3) до .
Ходжа Двойное вращение это просто что позволяет извлечь как ось вращения, так и синус угла поворота из самой матрицы вращения с обычной двусмысленностью,


![{\displaystyle {\begin{aligned}\sin(\theta)&=\sigma \left|\mathbf {R} ^{*}\right|\\[3pt]\mathbf {k} &=-{\frac {\sigma\mathbf{R}^{*}}{\left|\mathbf{R}^{*}\right|}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/10873523f1f1da4c1076c46e476b9ee80e324782)
где . Приведенное выше простое выражение является результатом того, что двойственные по Ходжу и равны нулю, и .




См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Ченг, Хуэй; Гупта, КЦ (март 1989 г.). «Историческая заметка о конечных вращениях» . Журнал прикладной механики . 56 (1). Американское общество инженеров-механиков: 139–145. дои : 10.1115/1.3176034 . Проверено 11 апреля 2022 г.
- ^ Фрэйтюр, Люк (2009). «История описания трехмерного конечного вращения» . Журнал астронавтических наук . 57 (1–2). Спрингер: 207–232. дои : 10.1007/BF03321502 . Проверено 15 апреля 2022 г.
- ^ Дай, Цзянь С. (октябрь 2015 г.). «Варианты формулы Эйлера-Родригеса, сопряжение кватернионов и внутренние связи» . Теория механизма и машин . 92 . Эльзевир: 144–152. doi : 10.1016/j.mechmachtheory.2015.03.004 . Проверено 14 апреля 2022 г.
- ^ Белонги, Серж. «Формула вращения Родригеса» . mathworld.wolfram.com . Проверено 7 апреля 2021 г.
- Леонард Эйлер , «Алгебраические задачи, связанные с совершенно исключительными эмоциями, которые следует запомнить», Commentatio 407 Indicis Enestoemiani, New Comm. акад. Знать Петрополитанае 15 (1770), 75–106.
- Олинде Родригес , «Геометрические законы, которые управляют смещениями твердой системы в пространстве, и изменение координат, происходящее из этих смещений, которые считаются независимыми от причин, которые могут их вызвать», Journal of Pure and Applied Mathematics 5 (1840), 380– 440. онлайн .
- Фридберг, Ричард (2022). « Родригес, Олинде: «Геометрические законы, управляющие перемещениями твердой системы...», перевод и комментарии ». arXiv:2211.07787 .
- Дон Кокс, (2006) Исследования в области математической физики , Springer Science+Business Media, LLC. ISBN 0-387-30943-8 . Глава 4, стр. 147 и последующие. Окружной путь к геометрической алгебре
Внешние ссылки
[ редактировать ]- Йохан Э. Мебиус, Вывод формулы Эйлера-Родригеса для трехмерных вращений из общей формулы для четырехмерных вращений. , arXiv Общая математика 2007.
- Другой описательный пример см.: http://chrishecker.com/Rigid_Body_Dynamics#Physics_Articles , Крис Хекер, раздел физики, часть 4. «Третье измерение» – на странице 3, раздел «Ось и угол» , http://chrishecker. com/images/b/bb/Gdmphys4.pdf