Угловое смещение
| Угловое смещение | |
|---|---|
 | |
Другие имена | вращательное перемещение, угол поворота |
Общие символы | я, ϑ, е |
| И объединились | радианы , градусы , обороты и т. д. (любая угловая единица ) |
| В базовых единицах СИ | радианы (рад) |
| Часть серии о |
| Классическая механика |
|---|

Угловое смещение (символ θ, ϑ или φ) — также называемое углом поворота , вращательным смещением или вращательным смещением , градусах , поворотах и . т — физического тела — это угол (в радианах д . ) , на который тело вращается (вращается или вращается) вокруг центра или оси вращения . Угловое смещение может быть подписано, указывая направление вращения (например, по часовой стрелке ); он также может быть больше (по абсолютной величине ), чем полный оборот .
Контекст [ править ]

Когда тело вращается вокруг своей оси, его движение нельзя просто анализировать как частицу, поскольку при круговом движении оно в любой момент подвергается изменению скорости и ускорения. Когда речь идет о вращении тела, проще считать само тело жестким. Тело обычно считается твердым, если расстояние между всеми частицами остается постоянным на протяжении всего движения тела, поэтому, например, части его массы не разлетаются. В реалистическом смысле все вещи могут быть деформируемыми, однако это влияние минимально и незначительно.
Пример [ править ]
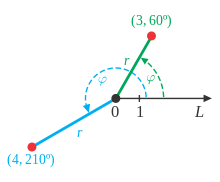
В примере, показанном справа (или выше в некоторых мобильных версиях), частица или тело P находится на фиксированном расстоянии r от начала координат O и вращается против часовой стрелки. Тогда становится важным представить положение частицы P через ее полярные координаты ( r , θ ). В данном конкретном примере значение θ меняется, а значение радиуса остаётся прежним. (В прямоугольных координатах ( x , y ) и x, и y меняются со временем.) Когда частица движется по кругу, она проходит дугу длиной s , которая становится связанной с угловым положением соотношением:

Определение и единицы измерения [ править ]
Угловое смещение может выражаться в радианах или градусах. Использование радианов обеспечивает очень простую связь между расстоянием, пройденным по кругу ( дуги окружности длиной ), и расстоянием r от центра ( радиусом ):

Например, если тело вращается на 360° по окружности радиуса r , угловое смещение определяется расстоянием, пройденным по окружности, которое равно 2π r , разделенным на радиус: что легко упрощается до: . , 1 оборот Следовательно радианы.



Приведенное выше определение является частью Международной системы величин (ISQ), формализованной в международном стандарте ISO 80000-3 (Пространство и время). [1] и принята в Международной системе единиц (СИ). [2] [3]
Угловое смещение может быть подписано, указывая направление вращения (например, по часовой стрелке ); [1] он также может быть больше (по абсолютной величине ), чем полный оборот .В ISQ/SI угловое смещение используется для определения количества оборотов , N =θ/(2π рад), величины отношения типа единицы .
В трёх измерениях [ править ]


В трех измерениях угловое смещение представляет собой объект с направлением и величиной. Направление определяет ось вращения, которая всегда существует в силу теоремы Эйлера о вращении ; величина определяет вращение в радианах вокруг этой оси (используя правило правой руки для определения направления). Эта сущность называется углом оси .
Несмотря на наличие направления и величины, угловое смещение не является вектором , поскольку не подчиняется коммутативному закону сложения. [4] Тем не менее, имея дело с бесконечно малыми вращениями, бесконечно малые второго порядка можно отбросить, и в этом случае появляется коммутативность.
Матрицы вращения [ править ]
Существует несколько способов описания вращения, например, матрицы вращения или углы Эйлера . см . в диаграммах SO(3) Другие .
Учитывая, что любой кадр в пространстве можно описать матрицей вращения, смещение между ними также можно описать матрицей вращения. Существование и две матрицы, матрицу углового смещения между ними можно получить как . Когда это произведение будет выполнено с очень небольшой разницей между обоими кадрами, мы получим матрицу, близкую к тождественной.



В пределе мы будем иметь бесконечно малую матрицу вращения.
Бесконечно малые матрицы вращения [ править ]
Матрица бесконечно малого вращения или матрица дифференциального вращения — это матрица, представляющая бесконечно малое вращение .
Хотя матрица вращения является ортогональной матрицей представляющий собой элемент ( специальная ортогональная группа ), дифференциал вращения представляет собой кососимметричную матрицу в касательном пространстве ( специальная ортогональная алгебра Ли ), которая сама по себе не является матрицей вращения.




Бесконечно малая матрица вращения имеет вид

где - единичная матрица, исчезающе мало и



Например, если представляющий бесконечно малое трехмерное вращение вокруг оси x , базовый элемент



См. также [ править ]
- Угловое расстояние
- Угловая частота
- Угловое положение
- Угловая скорость
- Азимут
- Бесконечно малое вращение
- Линейная эластичность
- Второй момент площади
- Развернутая фаза
Ссылки [ править ]
- ^ Jump up to: Перейти обратно: а б «ISO 80000-3:2019 Величины и единицы. Часть 3. Пространство и время» (2-е изд.). Международная организация по стандартизации . 2019 . Проверено 23 октября 2019 г. [1] (11 страниц)
- ^ Le Système International d'Unités [ Международная система единиц ] (PDF) (на французском и английском языках) (9-е изд.), Международное бюро мер и весов, 2019, ISBN 978-92-822-2272-0
- ^ Томпсон, Эмблер; Тейлор, Барри Н. (04 марта 2020 г.) [02 июля 2009 г.]. «Руководство NIST по использованию международной системы единиц, специальная публикация 811» (изд. 2008 г.). Национальный институт стандартов и технологий . Проверено 17 июля 2023 г. [2]
- ^ Клеппнер, Дэниел; Коленков, Роберт (1973). Введение в механику . МакГроу-Хилл. стр. 288–89 . ISBN 9780070350489 .
- ^ ( Гольдштейн, Пул и Сафко 2002 , §4.8)
Источники [ править ]
- Гольдштейн, Герберт ; Пул, Чарльз П .; Сафко, Джон Л. (2002), Классическая механика (третье изд.), Аддисон Уэсли , ISBN 978-0-201-65702-9
- Веддерберн, Джозеф Х.М. (1934), Лекции по матрицам , AMS , ISBN 978-0-8218-3204-2
