Теорема Эйлера о вращении
Эта статья нуждается в дополнительных цитатах для проверки . ( сентябрь 2010 г. ) |

В геометрии утверждает , теорема Эйлера о вращении что в трехмерном пространстве любое смещение твердого тела , при котором точка твердого тела остается неподвижной, эквивалентно одному повороту вокруг некоторой оси, проходящей через фиксированную точку . Это также означает, что композиция двух ротаций также является ротацией. Поэтому набор вращений имеет групповую структуру, известную как группа вращений .
Теорема названа в честь Леонарда Эйлера , который доказал ее в 1775 году с помощью сферической геометрии . Ось вращения известна как ось Эйлера и обычно представлена единичным вектором ê . Его произведение на угол поворота известно как вектор оси-угла . Распространение теоремы на кинематику дает понятие мгновенной оси вращения , линии неподвижных точек.
В терминах линейной алгебры теорема утверждает, что в трехмерном пространстве любые две декартовы системы координат с общим началом связаны вращением вокруг некоторой фиксированной оси. Это также означает, что произведение двух матриц вращения снова является матрицей вращения и что для нетождественной матрицы вращения одно собственное значение равно 1, а два других являются комплексными или оба равны -1. соответствующий Собственный вектор, этому собственному значению, является осью вращения, соединяющей две системы.
Теорема Эйлера (1776 г.)
[ редактировать ]Эйлер формулирует теорему следующим образом: [ 1 ]
Теорема. Как бы сфера ни вращалась вокруг своего центра, ей всегда можно присвоить диаметр , направление которого в транслируемом положении совпадает с исходным положением.
или (на английском языке):
При перемещении сферы вокруг своего центра всегда можно найти диаметр, направление которого в смещенном положении такое же, как и в исходном.

Доказательство
[ редактировать ]Первоначальное доказательство Эйлера было проведено с использованием сферической геометрии , и поэтому всякий раз, когда он говорит о треугольниках, их следует понимать как сферические треугольники .
Предыдущий анализ
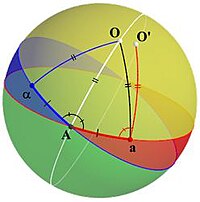
[ редактировать ]Чтобы прийти к доказательству, Эйлер анализирует, как бы выглядела ситуация, если бы теорема была верна. Для этого предположим, что желтая линия на рисунке 1 проходит через центр сферы и является искомой осью вращения, а точка O является одной из двух точек пересечения этой оси со сферой. Затем он рассматривает произвольный большой круг, не содержащий O (синий круг), и его изображение после вращения (красный круг), которое является еще одним большим кругом, не O. содержащим Он называет точку их пересечения А. точкой (Если окружности совпадают, то за А можно взять любую точку на любой из них; в противном случае А — одна из двух точек пересечения.)

Теперь А находится на исходном круге (синий круг), поэтому его изображение будет на транспортируемом круге (красный). Он называет это изображение точкой а . Поскольку точка A также находится на транспортируемом круге (красный), это изображение другой точки, которая была на исходном круге (синий), и он помечает это прообраз как α (см. рисунок 2 ). Затем он рассматривает две дуги, α и a с A. соединяющие Эти дуги имеют одинаковую длину, поскольку дуга αA отображается в дугу Aa . Кроме того, поскольку O является фиксированной точкой, треугольник αOA отображается в треугольник AOa , поэтому эти треугольники являются равнобедренными, а дуга AO делит угол пополам ∠ αAa .
Строительство точки лучшего кандидата
[ редактировать ]Построим точку, которая могла бы быть инвариантной, используя предыдущие соображения. Начнем с большого синего круга и его изображения после преобразования, которое представляет собой большой красный круг, как на рисунке 1 . Пусть точка А будет точкой пересечения этих окружностей. Если изображение А при преобразовании является той же самой точкой, то А является неподвижной точкой преобразования, а поскольку центр также является фиксированной точкой, диаметр сферы, содержащей А, является осью вращения, и теорема доказана.
В противном случае мы помечаем a образ A как , а его прообраз как α и соединяем эти две точки с A дугами αA и Aa . Эти дуги имеют одинаковую длину. Постройте большой круг, который делит пополам ∠ αAa , и расположите точку O на этом большом круге так, чтобы дуги AO и aO имели одинаковую длину, и назовите область сферы, содержащую O и ограниченную синим и красным большими кругами, внутренней частью ∠ αAa. . (То есть желтая область на рисунке 3. ) Тогда, поскольку αA = Aa и O находится на биссектрисе ∠ αAa , мы также имеем αO = aO .
Доказательство его инвариантности относительно преобразования.
[ редактировать ]Теперь предположим, что ’ — это образ O. O Тогда мы знаем, что ∠ αAO = ∠ AaO′ и ориентация сохраняется, [ а ] поэтому O′ должен быть внутренним по отношению к ∠ αAa . Теперь AO преобразуется в aO′ , поэтому AO = aO′ . Поскольку длина AO также равна длине aO , то aO = aO′ и ∠ AaO = ∠ aAO . Но ∠ αAO = ∠ aAO , поэтому ∠ αAO = ∠ AaO и ∠ AaO = ∠ AaO′ . Следовательно, ′ — это та же точка, что и O. O Другими словами, O — это фиксированная точка преобразования, а поскольку центр также является фиксированной точкой, диаметр сферы, содержащей O, является осью вращения.
Заключительные замечания о строительстве
[ редактировать ]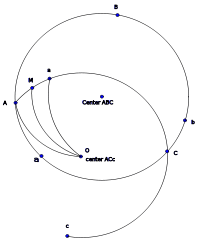
Эйлер также указывает, что O можно найти, пересекая биссектрису Aa с биссектрисой ∠ αAa , что на практике может оказаться проще. Он также предложил пересечение двух плоскостей:
- плоскость симметрии угла ∠ αAa (проходящая через центр C сферы) и
- плоскость симметрии дуги Аа (которая также проходит через С ).
- Предложение . Эти две плоскости пересекаются по диаметру. Именно этот диаметр нам и нужен.
- Доказательство . Назовем О любой из концов (их два) этого диаметра над поверхностью сферы. Так как αA отображается на Aa и треугольники имеют одинаковые углы, то треугольник OαA переносится на треугольник OAa . Поэтому точка О должна оставаться неподвижной при движении.
- Следствия . Это также показывает, что вращение сферы можно рассматривать как два последовательных отражения относительно двух описанных выше плоскостей. Точки в зеркальной плоскости инвариантны относительно отражения, и, следовательно, точки на их пересечении (линия: ось вращения) инвариантны как относительно отражений, так и, следовательно, относительно вращения.
Другой простой способ найти ось вращения — рассмотреть плоскость, на которой α , A ,. точки лежат Ось вращения, очевидно, ортогональна этой плоскости и проходит через центр С сферы.
Учитывая, что для твердого тела любое движение, которое оставляет ось инвариантной, является вращением, это также доказывает, что любая произвольная композиция вращений эквивалентна одному вращению вокруг новой оси.
Матричное доказательство
[ редактировать ]Пространственное вращение — это линейная карта во взаимно однозначном соответствии с 3 × 3 матрицей вращения R , которая преобразует координатный вектор x в X то есть Rx = X. , Следовательно, другая версия теоремы Эйлера состоит в том, что для каждого поворота R существует ненулевой вектор n , для которого Rn = n ; это в точности утверждение, что n является собственным вектором R , связанным с собственным значением 1. Следовательно, достаточно доказать, что 1 является собственным значением R ; осью вращения R будет линия µ n , где n — собственный вектор с собственным значением 1.
Матрица вращения обладает тем фундаментальным свойством, что ее инверсия является ее транспонированием, то есть

где I — единичная матрица 3 × 3 , а верхний индекс T указывает на транспонированную матрицу.
Вычислив определитель этого отношения, вы обнаружите, что матрица вращения имеет определитель ±1. В частности,

Матрица поворота с определителем +1 представляет собой правильный поворот, а матрица с отрицательным определителем -1 представляет собой неправильный поворот , то есть отражение в сочетании с правильным поворотом.
Теперь будет показано, что матрица собственного вращения R имеет по крайней мере один инвариантный вектор n , т. е. Rn = n . Поскольку для этого требуется, чтобы ( R − I ) n = 0 , мы видим, что вектор n должен быть собственным вектором матрицы R с собственным значением λ = 1 . Таким образом, это эквивалентно показу, что det( R − I ) = 0 .
Используйте два отношения

для любой 3 × 3 матрицы A и

(поскольку det( R ) = 1 ) для вычисления
![{\displaystyle {\begin{aligned}&\it(\mathbf {R} -\mathbf {I})=\it \left((\mathbf {R} -\mathbf {I})^{\mathsf {T }}\right)\\{}={}&\the \left(\mathbf{R}^{\mathsf {T}}-\mathbf{I}\right)=\the \left(\mathbf{R}^{-1}-\mathbf{R}^{-1}\mathbf{R}\right)\\ {}={}&\the \left(\mathbf{R}^{-1}(\mathbf{I} -\mathbf{R} )\right)=\the \left(\mathbf {R} ^{-1}\right)\,\det(-(\mathbf {R} -\mathbf {I} ))\\{}={}&-\det(\mathbf {R}-\mathbf{I})\\[3pt]\Longrightarrow\0={}&\det(\mathbf{R}-\mathbf{I} ).\end{выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a19bb96e6a44a0b965973b26e6afe5c63ba11407)
Это показывает, что λ = 1 является корнем (решением) характеристического уравнения , т. е.

Другими словами, матрица R − I сингулярна и имеет ненулевое ядро , то есть существует хотя бы один ненулевой вектор, скажем n , для которого

Линия µ n для вещественного µ инвариантна относительно R , т. е. µ n является осью вращения. Это доказывает теорему Эйлера.
Эквивалентность ортогональной матрицы матрице вращения
[ редактировать ]Две матрицы (представляющие линейные карты) называются эквивалентными, если при изменении базиса одна становится равной другой. Правильная ортогональная матрица всегда эквивалентна (в этом смысле) либо следующей матрице, либо ее вертикальному отражению:

Тогда любая ортогональная матрица является либо вращением, либо неправильным вращением . Общая ортогональная матрица имеет только одно действительное собственное значение: +1 или -1. Когда это +1, матрица является поворотом. Когда −1, матрица представляет собой неправильный поворот.
Если R имеет более одного инвариантного вектора, то = 0 и R = I. φ Любой вектор является инвариантным вектором I .
Экскурс в теорию матриц
[ редактировать ]Для доказательства предыдущего уравнения необходимо вспомнить некоторые факты из теории матриц.
размера m × m Матрица A имеет m ортогональных собственных векторов тогда и только тогда, когда , то A нормальна есть если A † А = АА † . [ б ] Этот результат эквивалентен утверждению, что нормальные матрицы можно привести к диагональной форме с помощью унитарного преобразования подобия:

и U унитарно, т. е.

Собственные значения α 1 , ..., α m являются корнями характеристического уравнения. Если матрица A унитарна (заметим, что унитарные матрицы нормальны), то

откуда следует, что собственные значения унитарной матрицы лежат на единичной окружности комплексной плоскости:

Также ортогональная (действительная унитарная) матрица имеет собственные значения на единичной окружности в комплексной плоскости. Более того, поскольку его характеристическое уравнение ( многочлен m -го порядка от λ ) имеет вещественные коэффициенты, отсюда следует, что его корни появляются в комплексно-сопряженных парах, то есть, если α является корнем, то и α является корнем. ∗ . Корней 3, поэтому хотя бы один из них должен быть чисто вещественным (+1 или −1).
Вспомнив эти общие факты из теории матриц, вернемся к матрице R. вращения Из его реальности и ортогональности следует, что мы можем найти U такое, что:

Если можно найти матрицу U , которая дает указанную выше форму, и существует только один чисто вещественный компонент, равный −1, то мы определяем быть неправильным вращением. Давайте тогда рассмотрим только случай матриц R, которые являются собственными вращениями (третье собственное значение равно 1). Тогда третий столбец 3 × 3 матрицы U будет равен инвариантному вектору n . Записав u 1 и u 2 для первых двух столбцов U , это уравнение дает


Если u 1 имеет собственное значение 1, то φ = 0 и u 2 также имеет собственное значение 1, из чего следует, что в этом случае R = I . Однако в целом, как подразумевает, что также держится, так что можно выбрать для . Сходным образом, может привести к только с реальными записями, для правильной матрицы вращения . Наконец, матричное уравнение преобразуется с помощью унитарной матрицы:







что дает

Столбцы U ′ ортонормированы, поскольку это унитарная матрица только с вещественными элементами, согласно ее определению, приведенному выше, что представляет собой комплексное сопряжение и это представляет собой вектор с вещественными компонентами. Третий столбец по-прежнему n , два других столбца U ′ перпендикулярны n . Теперь мы можем увидеть, как наше определение неправильного вращения соответствует геометрической интерпретации: неправильное вращение — это вращение вокруг оси (здесь оси, соответствующей третьей координате) и отражение в плоскости, перпендикулярной этой оси. Если мы ограничимся только матрицами с определителем 1, мы увидим, что они должны быть собственными вращениями. Из этого результата следует, что любая ортогональная матрица R, соответствующая собственному повороту, эквивалентна повороту на угол φ вокруг оси n .


Классы эквивалентности
[ редактировать ]След 1 (сумма диагональных элементов) реальной матрицы вращения, приведенной выше, равен + 2 cos φ . Поскольку след инвариантен относительно преобразования подобия ортогональной матрицы,
![{\displaystyle\mathrm{Tr}\left[\mathbf{A}\mathbf{R}\mathbf{A}^{\mathsf{T}}\right]=\mathsf{Tr}\left[\mathbf{R } \mathbf{A}^{\mathsf{T}}\mathbf{A}\right]=\mathrm{Tr} [\mathbf{R}]\quad{\text{with}}\quad\mathbf{A}^{\mathsf{T}}=\mathbf{A}^{-1},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/899635016524f868479646782fb830845ff74608)
отсюда следует, что все матрицы, эквивалентные R посредством таких ортогональных матричных преобразований, имеют один и тот же след: след является функцией класса . Это матричное преобразование, очевидно, является отношением эквивалентности , то есть все такие эквивалентные матрицы образуют класс эквивалентности.
Фактически, все вращения 3 × 3 матрицы собственного вращения образуют группу , обычно обозначаемую SO (3) (специальная ортогональная группа в 3 измерениях), и все матрицы с одним и тем же следом образуют класс эквивалентности в этой группе. Все элементы такого класса эквивалентности имеют общий угол поворота , но все повороты происходят вокруг разных осей. Если n — собственный вектор R с собственным значением 1, то An также является собственным вектором ARA. Т , также с собственным значением 1. Если A = I , n и An не различны.
Приложения
[ редактировать ]Генераторы вращений
[ редактировать ]Предположим, мы задаем ось вращения единичным вектором [ x , y , z ] и предположим, что у нас есть бесконечно малое вращение на угол Δ θ вокруг этого вектора. Если разложить матрицу вращения как бесконечное сложение и использовать подход первого порядка, матрица вращения Δ R будет представлена как:

Конечное вращение на угол θ вокруг этой оси можно рассматривать как последовательность небольших вращений вокруг одной и той же оси. Аппроксимируя Δ θ как θ / N где N — большое число, вращение θ вокруг оси можно представить как:

Можно видеть, что теорема Эйлера по существу утверждает, что все вращения могут быть представлены в этой форме. Продукт A θ является «генератором» конкретного вращения, являясь вектором ( x , y , z ), связанным с матрицей A . Это показывает, что матрица вращения и формат ось-угол связаны экспоненциальной функцией.
Можно вывести простое выражение для G. генератора Начинаем с произвольной плоскости (в евклидовом пространстве), определяемой парой перпендикулярных единичных векторов a и b . В этой плоскости можно выбрать произвольный вектор x с перпендикуляром y . Затем вычисляется значение y через x , и подстановка в выражение для вращения в плоскости дает матрицу вращения R , которая включает генератор G = ba. Т − аб Т .
![{\displaystyle {\begin{aligned}\mathbf {x} &=\mathbf {a} \cos \alpha +\mathbf {b} \sin \alpha \\\mathbf {y} &=-\mathbf {a} \sin \alpha +\mathbf {b} \cos \alpha \\[8pt]\cos \alpha &=\mathbf {a} ^{\mathsf{T}}\mathbf{x}\\\sin \alpha &=\mathbf{b}^{\mathsf{T}}\mathbf{x}\\[8px]\mathbf{y}& =-\mathbf{ab}^{\mathsf{T}}\mathbf{x}+\mathbf{ba}^{\mathsf {T}}\mathbf{x} =\left(\mathbf{ba}^{\mathsf{T}}-\mathbf{ab}^{\mathsf{T}}\right)\mathbf{x}\\ [8px]\mathbf{x} '&=\mathbf{x}\cos\beta+\mathbf{y}\sin\beta \\&=\left(\mathbf{I}\cos \beta +\left(\mathbf{ba}^{\mathsf{T}}-\mathbf{ab}^{\mathsf{T}}\right) \sin \beta\right)\mathbf{x}\\[8px]\mathbf{R}&=\mathbf{I}\cos\beta +\left(\mathbf{ba}^{\mathsf{T}}-\mathbf{ab}^{\mathsf{T}}\right)\sin\beta\&=\mathbf{I}\cos\ beta +\mathbf {G} \sin \beta \\[8px]\mathbf {G} &=\mathbf {ba}^{\mathsf {T}}-\mathbf{ab}^{\mathsf{T}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8d76b9d6b44bdc5ec71c43fbe44d67758962768e)
Чтобы включить в вращение векторы вне плоскости, необходимо изменить приведенное выше выражение для R , включив в него два оператора проекции , которые разделяют пространство. Эту модифицированную матрицу вращения можно переписать как экспоненциальную функцию .

Анализ часто проще с точки зрения этих генераторов, а не полной матрицы вращения. Анализ в терминах генераторов известен как алгебра Ли группы вращений.
Кватернионы
[ редактировать ]Из теоремы Эйлера следует, что относительная ориентация любой пары систем координат может быть задана набором из трех независимых чисел. Иногда для упрощения операций с алгеброй кватернионов добавляется избыточное четвертое число. Три из этих чисел представляют собой направляющие косинусы, ориентирующие собственный вектор. Четвертый — это угол вокруг собственного вектора, разделяющий два набора координат. Такой набор из четырех чисел называется кватернионом .
Хотя описанный выше кватернион не включает в себя комплексные числа , если кватернионы используются для описания двух последовательных вращений, их необходимо объединить с помощью некоммутативной алгебры кватернионов, полученной Уильямом Роуэном Гамильтоном с использованием мнимых чисел.
Расчет вращения с помощью кватернионов пришел на смену использованию направляющих косинусов в аэрокосмических приложениях благодаря сокращению необходимых вычислений и способности минимизировать ошибки округления . Кроме того, в компьютерной графике имеет значение возможность сравнительно легко выполнять сферическую интерполяцию между кватернионами.
Обобщения
[ редактировать ]В более высоких измерениях любое твердое движение, сохраняющее точку в размерности 2 n или 2 n + 1, представляет собой композицию не более n вращений в ортогональных плоскостях вращения , хотя эти плоскости не обязательно должны быть определены однозначно, и жесткое движение может фиксировать несколько топоры. Кроме того, любое твердое движение, сохраняющее n линейно независимых точек, охватывающее n -мерное тело в размерности 2 n или 2 n + 1 , представляет собой единую плоскость вращения . Другими словами, если два твердых тела с одинаковой геометрией имеют внутри себя как минимум n точек «идентичных» положений, выпуклая оболочка которых является n -мерной, то одно плоское вращение может привести к тому, что одно из них покроет другое. точно в размерности 2 n или 2 n + 1 .

Жесткое движение в трех измерениях, которое не обязательно фиксирует точку, называется «винтовым движением». Это связано с тем, что композиция вращения с перемещением, перпендикулярным оси, представляет собой вращение вокруг параллельной оси, а композиция с перемещением, параллельным оси, дает винтовое движение; см . ось винта . Это порождает теорию винта .
См. также
[ редактировать ]- углы Эйлера
- Формула Эйлера – Родригеса
- Формализмы вращения в трех измерениях
- Угловая скорость
- Вращение вокруг фиксированной оси
- Матричная экспонента
- Представление оси-угла
- Теорема Часла (кинематика) для расширения, касающегося общих перемещений твердого тела.
Примечания
[ редактировать ]- ^ Ориентация сохраняется в том смысле, что если αA поворачивается вокруг A против часовой стрелки, чтобы совместить с OA , то Aa необходимо повернуть вокруг против часовой стрелки, чтобы совместить с O'a . Аналогично, если вращение происходит по часовой стрелке.
- ^ Символ кинжала † обозначает комплексное сопряжение с последующей транспозицией. Для реальных матриц комплексное сопряжение ничего не дает, и перечеркнуть реальную матрицу - это то же самое, что ее транспонировать.
Ссылки
[ редактировать ]- ^ Новые комментарии Петрополитической академии наук 20, 1776, стр. 189–207 (Е478)
- Эта статья включает в себя материал из статьи Citizendium « Теорема Эйлера (вращение) », которая распространяется под лицензией Creative Commons Attribution-ShareAlike 3.0 Unported License , но не под GFDL .
- Теорема Эйлера и ее доказательство содержатся в параграфах 24–26 приложения ( Additamentum . стр. 201–203) Л. Эйлера (Leonhard Euler) « Общие формулы перевода произвольных твердых тел», представленного в Санкт-Петербургском университете. Петербургской академии 9 октября 1775 года и впервые опубликовано в «Новых записках Петрополитической академии наук» 20 , 1776, с. 189–207 (E478) и был переиздан в «Теории движения твердых тел» под ред. новый, 1790, с. 449–460 (E478a) и позже в собрании сочинений Opera Omnia , Series 2, Volume 9 , pp. 84–98.
- Пале, Боб; Пале, Ришар; Роди, Стивен (2009). «Дезориентирующий взгляд на теорему Эйлера об оси вращения». Американский математический ежемесячник . 116 (10): 892–909. дои : 10.4169/000298909x477014 .
Внешние ссылки
[ редактировать ]- Оригинальный трактат Эйлера в Архиве Эйлера : запись на E478 , первая публикация 1776 г. ( pdf )
- Оригинальный текст Эйлера (на латыни) и английский перевод (Йохан Стен)
- Демонстрационный проект Вольфрама по теореме Эйлера о вращении (Том Верхуфф)