Передвижение позвоночника

Спинальная локомоция является результатом сложных динамических взаимодействий между центральной программой в нижнегрудопоясничном отделе позвоночника и проприоцептивной обратной связью от тела при отсутствии центрального контроля со стороны головного мозга , как при полном повреждении спинного мозга (ТСМ). [1] [2] [3] [4] После ТСМ спинной мозг ниже места поражения не замолкает; скорее, он продолжает сохранять активные и функциональные свойства нейронов, хотя и в измененном виде. [5] [6]
Компоненты движения позвоночника [ править ]

Централизованно генерируемые шаблоны [ править ]
Спинной мозг осуществляет ритмичную и последовательную активацию мышц при локомоции. Центральный генератор паттернов (CPG) обеспечивает базовый локомоторный ритм и синергию путем интеграции команд из различных источников, которые служат для инициации или модуляции его выходных данных в соответствии с требованиями окружающей среды. CPG в пояснично-крестцовых сегментах спинного мозга представляет собой важный компонент общей схемы, которая генерирует и контролирует позу и локомоцию . [7] Эта спинная схема может функционировать независимо в отсутствие нисходящих сигналов от мозга, создавая стабильную позу и передвижение и даже модулируя активность в соответствии с меняющимися условиями (например, перешагивание через препятствия). [8] Эта способность улучшается с помощью тренировок (пластичность позвоночника). [7] поэтому считается, что спинной мозг обладает способностью к обучению и запоминанию. [9] [10]
Сенсорная обратная связь [ править ]
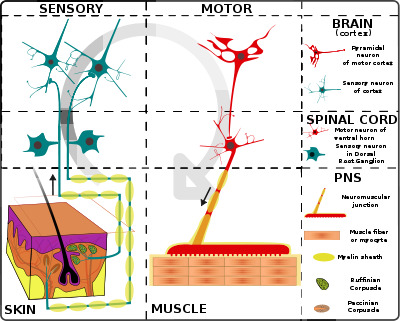
Сенсорная обратная связь исходит от мышц , суставов , сухожилий и кожных афферентов, а также от особых органов чувств и динамически адаптирует двигательный паттерн спинного мозга к требованиям окружающей среды. Эти афферентные сенсорные рецепторы воспринимают деформацию ткани, величину давления (растяжения или просто размещения), направление движения, скорость и скорость, с которой происходит движение.
CPG Сенсорная модуляция
Динамическое взаимодействие между спинным мозгом и сенсорной информацией обеспечивается путем модуляции передачи в локомоторных путях в зависимости от состояния и фазы. Например, проприоцептивные сигналы от разгибателей могут во время стояния регулировать время и амплитуду мышечной активности конечностей в соответствии со скоростью передвижения, но приглушаться во время фазы качания цикла. Аналогично, кожные афференты преимущественно участвуют в коррекции положения конечностей и стоп во время стояния на неровной местности, но кожные стимулы могут вызывать различные типы реакций в зависимости от того, когда они возникают в цикле шагов . [11] Важно отметить, что сигналы от бедра, по-видимому, играют решающую роль в локомоции позвоночника. Эксперименты на животных со позвоночником показали, что, когда одна конечность удерживается при согнутом бедре, движение на этой стороне прекращается, в то время как другая конечность продолжает идти. Однако, когда остановленная конечность выпрямляется в тазобедренном суставе до точки, которая обычно достигается в конце стойки во время ходьбы, она внезапно сгибается и снова начинает ходить при условии, что контрлатеральная конечность находится в положении, позволяющем принять вес задних конечностей. [12] Другая работа подтвердила важность афферентов бедра для генерации локомоторного ритма, поскольку сгибание бедра нарушает ритм, тогда как разгибание усиливает его. [13]
Спинной мозг обрабатывает и интерпретирует проприоцепцию аналогично тому, как наша зрительная система обрабатывает информацию. [14] Когда просматривается картина, мозг интерпретирует все поле зрения , а не обрабатывает каждый отдельный пиксель информации независимо, а затем создает изображение. В любой момент спинной мозг получает совокупность информации от всех рецепторов по всему телу, которая сигнализирует о проприоцептивном «образе», представляющем время и пространство, и вычисляет, какие нейроны возбуждать следующими, на основе последних воспринятых «образов». Важность CPG заключается не только в его способности генерировать повторяющиеся циклы, но также в получении, интерпретации и прогнозировании соответствующих последовательностей действий во время любой части пошагового цикла, т. е. в зависимости от состояния. Периферийный вход затем предоставляет важную информацию, на основе которой вероятности того, что данный набор нейронов будет активен в любой момент времени, могут быть точно настроены на данную ситуацию во время определенной фазы пошагового цикла. Прекрасным примером этого является приложение механического стимула к тыльной стороне лапы кошки. Когда стимул применяется во время фазы качания, мышцы-сгибатели конечности возбуждаются, и результат улучшается. сгибание с целью переступить через препятствие, создавшее раздражитель. [15] Однако, когда тот же стимул применяется во время стойки, разгибатели возбуждаются. Таким образом, функциональная связь между механорецепторами и специфическими популяциями межнейронов в спинном мозге варьируется в зависимости от физиологического состояния. Даже эффективность моносинаптического воздействия от мышечных веретен на двигательный нейрон легко меняется от одной части шагового цикла к другой в зависимости от того, бежит или ходит субъект. [16]
В отсутствие CPG, контроля со стороны головного мозга, как это происходит при полном повреждении спинного мозга, сенсорная обратная связь очень важна для создания ритмических движений. Во-первых, локомоторные движения могут быть инициированы или заблокированы некоторыми проприоцептивными афферентными входами. [12] Другая работа подтвердила важность афферентов бедра для генерации локомоторного ритма, поскольку сгибание бедра нарушает ритм, тогда как разгибание усиливает его. [13] Во-вторых, проприоцептивные афференты могут участвовать в адаптации скорости ходьбы, определении общей продолжительности цикла и регуляции структуры подфаз цикла шага (т. е. поворота, стойки), что необходимо для адаптации скорости и соединения конечностей. [16] [17] В-третьих, проприоцептивные афференты участвуют в установлении уровня мышечной активности посредством различных рефлекторных путей. [18]
развития Доказательства
На ультразвуковых записях были зафиксированы внутриутробные изображения человеческих плодов на сроке 13–14 недель беременности, «ползающих и карабкающихся» и совершающих чередующиеся шаги. [19] Начало ходьбы у плода предшествует развитию и миелинизации большинства нисходящих путей головного мозга, что убедительно указывает на локомоторную CPG спинного мозга человека, координацию и пластичность сенсорной обратной связи. В совокупности исследования в течение первого года после рождения показывают, что локомоторный континуум простирается от неонатального шагания до начала самостоятельной ходьбы, что также позволяет предположить, что локомоция человека контролируется CPG и сенсорным взаимодействием.
Реабилитация [ править ]
Травмированный спинной мозг представляет собой «измененный» спинной мозг. После ТСМ супраспинальные и спинальные источники контроля движений существенно отличаются от тех, которые существовали до травмы. [20] что приводит к изменению спинного мозга. Автоматичность позы и передвижения возникает в результате взаимодействия между периферической нервной системой (ПНС) и центральной нервной системой (ЦНС), работая в синергии, причем каждая система имеет внутренние паттерны активации и торможения, которые могут генерировать скоординированные двигательные сигналы.
Электростимуляция [ править ]
Многочисленные эксперименты показали, что электрическая стимуляция (ЭС) пояснично-крестцового утолщения и дорсального корешка может индуцировать локомоторные паттерны ЭМГ и даже шагание задними конечностями у животных с острым и хроническим нижнепозвоночным отделом позвоночника и у людей. [21] [22] Увеличение амплитуды стимуляции приводило к увеличению амплитуд ЭМГ и увеличению частоты ритмической активности. Высокие частоты стимуляции (>70 Гц) вызывали тоническую активность в мускулатуре ног, что позволяет предположить, что стимуляция верхнего поясничного отдела может активировать нейрональные структуры, которые затем рекрутируют интернейроны, участвующие в CPG. [23]
Тренировка на беговой дорожке [ править ]
Тренировка на беговой дорожке (более известная как тренировка на беговой дорожке с поддержкой веса тела) может применяться с помощью мануала (терапевта) или с помощью робота. При обучении на мануальной беговой дорожке терапевты помогают поддерживать вертикальное положение и нормальную походку. [24] Помощь терапевта может быть оказана на тазе, ноге и стопе пациента, а третий терапевт контролирует настройки беговой дорожки. [25] При обучении на беговой дорожке с помощью робота устройство заменяет необходимость терапевтов помогать пациенту в создании нормальной схемы шагов. В настоящее время доступны три различные модели: Lokomat от Hocoma , автоамбулятор HealthSouth и механизированный тренажер походки II. [25] Lokomat — это управляемый ортез для ходьбы, состоящий из управляемого компьютером экзоскелета, который крепится к ногам пациента и поддерживается на беговой дорожке. [24] В дополнение к беговой дорожке с ременным приводом и подвесному подъемнику, автоамбулятор HealthSouth также включает в себя пару шарнирных рычагов (приводящих в движение тазобедренные и коленные суставы) и две вертикальные конструкции, в которых размещены компьютерные элементы управления и механизм разгрузки веса тела. [25] В отличие от первых двух, Mechanized Gait Trainer II не работает в сочетании с беговой дорожкой; вместо этого он основан на системе кривошипно-коромысловой передачи, которая обеспечивает движение конечностей, аналогичное эллиптическому тренажеру. [25] Тренировка на беговой дорожке с роботом была разработана с тремя целями: 1. уменьшить физические требования и время терапевта, 2. улучшить повторяемость кинематики шагов и 3. увеличить объем двигательной тренировки. [25]
У людей с клинически полной травмой спинного мозга есть доказательства того, что тренировка на беговой дорожке может улучшить некоторые аспекты ходьбы при некоторой поддержке веса. Дитц и его коллеги сообщили, что после нескольких недель тренировок на беговой дорожке уровень нагрузки, который может быть возложен на ноги клинически полных пациентов с ТСМ во время ходьбы на беговой дорожке, значительно увеличивается. [26] При ходьбе по беговой дорожке с поддержкой веса тела у клинически полных субъектов, которые в противном случае не могут произвольно вызывать мышечную активность в ногах, можно выявить ритмические паттерны активации мышц ног. [27] Недавнее исследование продемонстрировало, что уровни активности мышц-разгибателей ног, зарегистрированные у клинически полных пациентов с травмой спинного мозга, значительно улучшились в течение нескольких недель тренировок по шагам. [28] способность шагать у пациентов с клинически завершенной травмой спинного мозга может улучшиться в ответ на ступенчатую тренировку, но уровень улучшения не достиг уровня, который позволяет полную независимость от посторонней помощи во время полной нагрузки. Также было показано, что у людей с полной или двигательной травмой спинного мозга новый подход с использованием препарата, активирующего CPG, под названием «Спиналон», остро вызывает эпизоды ритмических локомоторно-подобных движений ног или соответствующую электромиографическую активность. [29] Во многом благодаря знаниям, полученным в ходе исследований на спинализованных животных, появились два общих принципа возбуждения спинальных цепей, генерирующих шагание:
- Тренировки на беговой дорожке с поддержкой веса тела улучшают способность пояснично-крестцового отдела спинного мозга генерировать ходьбу с весовой нагрузкой.
- Паттерны сенсорной информации, обеспечиваемые во время локомоторной тренировки, имеют решающее значение для обеспечения пластичности, которая обеспечивает восстановление локомоторных функций.
См. также [ править ]
- Центральный генератор шаблонов
- Центральная нервная система
- Локомотив
- Проприоцепция
- Спинной мозг
- Травма спинного мозга
- Особые чувства
Ссылки [ править ]
- ^ Эдгертон и др., 1998a. Локомоторные способности, связанные со ступенчатой тренировкой, в сравнении со спонтанным восстановлением после спинализации у взрослых кошек. Журнал нейрофизиологии. 79:1329–1340.
- ^ Эдгертон и др., 1999a. Сохранение способности шагать задними конечностями у взрослых спинальных кошек после прекращения тренировки шага. Журнал нейрофизиологии. 81:85–94.
- ^ Edgerton et al, 2002. Использование робототехники для оценки адаптивных способностей поясничного отдела спинного мозга крыс. Прог. Мозговой Рес. 137:141–149.
- ^ Гертин П.А. (декабрь 2009 г.). «Генератор центральных паттернов передвижения млекопитающих». Обзоры исследований мозга . 62 (4): 345–56. дои : 10.1016/j.brainresrev.2009.08.002 . ПМИД 1972008 . S2CID 9374670 .
- ^ Эдгертон, В.Р., Харкема, С.Дж., Добкин, Б.Х. 2003. Переподготовка спинного мозга человека. В: Медицина спинного мозга: принципы и практика. Медицинское издательство «Демос», глава 60, 817–826.
- ^ де Леон, Р.Д., Рой, Р.Р. и Эдгертон, VR2001. Опосредовано ли восстановление ходьбы после травмы спинного мозга модификацией существующих нервных путей или созданием новых путей? Физиотерапия. 81 (12): 1904–1911.
- ^ Jump up to: Перейти обратно: а б Дитц 2003. Генераторы паттернов спинного мозга для передвижения. Клин. Нейрофизиология. 114:1379–89.
- ^ Форссберг Х., Гриллнер С., Россиньол С. 1975 Фазозависимое изменение рефлекса во время ходьбы у кошек с хроническим спинальным заболеванием. Исследования мозга. 85:103–107.
- ^ Гарравэй С.М., Хохман С. 2001. Серотонин увеличивает частоту первичного афферентного вызванногодлительная депрессия нейронов глубоких задних рогов крыс. Журнал нейрофизиологии 85: 1864–1872.
- ^ Риг Л.Дж., Тьолсен А., Хоул К., Свендсен Ф. 2002.Клеточная память в ноцицептивных схемах спинного мозга. Скандинавский журнал психологии. 43:153–159.
- ^ Симонсен Э.Б., Дюре-Поульсен П. 1999. Амплитуда H-рефлекса камбаловидной мышцы человека во время ходьбы и бега. Журнал физиологии. 515:929–939.
- ^ Jump up to: Перейти обратно: а б Гриллнер С., Россиньоль С., 1978. О начале качающейся фазы локомоции у кошек с хроническим спинальным заболеванием. Исследования мозга. 146, 269–277.
- ^ Jump up to: Перейти обратно: а б Пирсон К.Г., Россиньол С., 1991. Фиктивные двигательные паттерны у кошек с хроническим спинальным заболеванием. Журнал нейрофизиологии. 66, 1874–1887.
- ^ Реджи Эдгертон 2004. Пластичность спинномозговой нервной системы после травмы. Ежегодный обзор неврологии. 27:145–167.
- ^ Форссберг H.1979 Корректирующая реакция спотыкания: фазозависимая компенсаторная реакция во время передвижения. Журнал нейрофизиологии, 42:936–953.
- ^ Jump up to: Перейти обратно: а б Лавли Р.Г., Грегор Р.Дж., Рой Р.Р., Эдгертон ВР.1990. Шагание задними конечностями, несущими вес, у взрослых кошек со позвоночником, тренирующихся на беговой дорожке. Исследования мозга. 514: 206–218
- ^ Zehret al, 2003 Нейронный контроль ритмических движений рук человека: фазовая зависимость и модуляция задач рефлексов Гофмана в мышцах предплечья. Журнал нейрофизиологии. 89:12–21.
- ^ Дуйсенс Дж., Пирсон К.Г. 1980. Ингибирование генерации импульсов сгибателей путем нагрузки на мышцы-разгибатели голеностопного сустава у гуляющих кошек. Мозг Res.187:321–332.
- ^ Яннируберто и Таяни Ультрасонографическое исследование движений плода. Семинары по перинатологии 5: 175–181, 1981. [Web of Science] [Medline].
- ^ Дитц и др., 1998b. Локомоторный паттерн у пациентов с параличом нижних конечностей: эффект тренировки и восстановление функции спинного мозга. Спинной мозг. 36:380–390.
- ^ Гриллнер С., Зангер П. 1984. Влияние перерезки дорсального корешка на эфферентный двигательный паттерн задних конечностей кошки во время передвижения. Акта Физиологика Скандинавия. 120:393–405.
- ^ Герасименко Ю.П., Авелев В.Д., Никитин О.А., Лавров И.А. 2003. Инициация двигательной активности у спинальных кошек путем эпидуральной стимуляции спинного мозга. Неврология и поведенческая физиология. 33:247–254.
- ^ Димитриевич М.Р., Герасименко Ю., Пинтер М.М.1998. Доказательства наличия у человека генератора центральных паттернов в позвоночнике. Анналы Нью-Йоркской академии наук. 860:360–376.
- ^ Jump up to: Перейти обратно: а б Хорнби, Джордж Т., Земон, Дэвид Х. и Кэмпбелл, Дониэль. 2005. Тренировка на беговой дорожке с использованием веса тела с помощью робота у людей, перенесших неполную двигательную травму спинного мозга. Физиотерапия, 85 (1), 52-66.
- ^ Jump up to: Перейти обратно: а б с д и Винчестер, Патриция и Куэрри, Росс. 2006. Роботизированные ортезы для тренировок на беговой дорожке с поддержкой веса тела. Клиники физической медицины и реабилитации Северной Америки, 17 (1), 159–172.
- ^ Дитц В., Коломбо Г., Дженсен Л., Баумгартнер Л.1995. Локомоторные возможности спинного мозга у больных параплегией. Анналы неврологии. 37:574–582.
- ^ Мэгеле М., Мюллер С., Верниг А., Эдгертон В.Р., Харкема С.Дж. 2002. Рекрутирование спинальных двигательных пулов во время произвольных движений по сравнению с ходьбой после травмы спинного мозга человека. Журнал нейротравмы. 19:1217–1229.
- ^ Вирц М., Коломбо Г., Дитц В. 2001. Долгосрочные эффекты локомоторной тренировки у человека с позвоночником. Журнал неврологии, нейрохирургии и психиатрии. 71:93–96.
- ^ Радхакришна М., Стойер И., Принс Ф., Робертс М., Монгеон Д., Киа М., Дайк С., Мэтт Г., Вайланкур М., Гертен П.А. (декабрь 2017 г.). «Двойное слепое плацебо-контролируемое рандомизированное исследование фазы I/IIa (безопасность и эффективность) с буспироном/леводопой/карбидопой (Спиналон) у субъектов с полным повреждением спинного мозга AIS A или полным двигательным повреждением AIS B». Текущий фармацевтический дизайн . 23 (12): 1789–1804. дои : 10.2174/1381612822666161227152200 . ПМИД 28025945 .
Внешние ссылки [ править ]
- www.sci-info-pages.com/levels.html
- В исследовании этой статьи в Википедии участвовал доктор Джейни Янг, внесший вклад в онлайн-семинар.
- Исследования для этой страницы включали обзорные статьи доктора Эдгертона.
- Исследование для этой статьи в Википедии было проведено в рамках курса нейромеханики передвижения (APPH 6232), предлагаемого в Школе прикладной физиологии Технологического института Джорджии.