походка

Походка — характер движения конечностей человека животных , , в том числе при передвижении по твердой поверхности. Большинство животных используют различные походки, выбирая походку в зависимости от скорости, местности , необходимости маневрирования и энергетической эффективности. Разные виды животных могут использовать разные походки из-за различий в анатомии , которые не позволяют использовать определенные походки, или просто из-за развившихся врожденных предпочтений в результате различий в среде обитания. Хотя разным походкам даны конкретные названия, сложность биологических систем и взаимодействие с окружающей средой делают эти различия в лучшем случае «размытыми». Походку обычно классифицируют по характеру шагов, но недавние исследования часто отдают предпочтение определениям, основанным на механике. Этот термин обычно относится не к движению конечностей в жидких средах, таких как вода или воздух, а, скорее, к движению по твердому субстрату путем создания против него реактивных сил (что может применяться к ходьбе как под водой, так и на суше).
Из-за быстроты движений животных простого прямого наблюдения редко бывает достаточно, чтобы понять характер движения конечностей. Несмотря на ранние попытки классифицировать походку на основе следов или звука шагов, только когда Эдверд Мейбридж и Этьен-Жюль Марей начали делать серию быстрых фотографий, началось надлежащее научное исследование походки.
Обзор
[ редактировать ]Милтон Хильдебранд стал пионером современного научного анализа и классификации походки. Движение каждой конечности было разделено на фазу опоры, когда ступня соприкасалась с землей, и фазу качания, когда ступня поднималась и двигалась вперед. [1] [2] Каждая конечность должна завершить цикл за один и тот же промежуток времени , иначе отношение одной конечности к другим может со временем измениться, и устойчивая закономерность не может возникнуть. Таким образом, любую походку можно полностью описать с точки зрения начала и окончания фазы опоры трех конечностей относительно цикла опорной конечности, обычно левой задней конечности .
Переменные
[ редактировать ]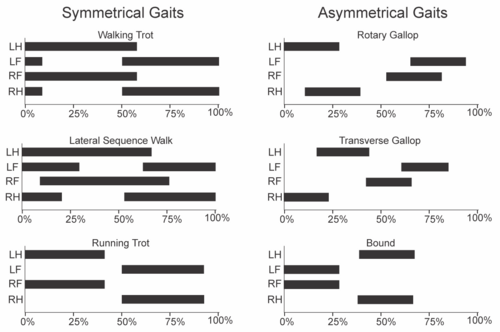
Походку обычно делят на «симметричную» и «асимметричную» в зависимости от движения конечностей. Эти термины не имеют ничего общего с симметрией слева и справа . При симметричной походке левые и правые конечности пары чередуются, а при асимметричной походке конечности движутся вместе. Асимметричную походку иногда называют «прыгучей походкой» из-за наличия фазы зависания.
Ключевыми переменными для походки являются коэффициент заполнения и соотношение фаз передних и задних конечностей. Коэффициент заполнения — это просто процент от общего цикла, в течение которого данная нога находится на земле. Это значение обычно одинаково для передних и задних конечностей, за исключением случаев, когда животное движется специально обученной походкой или ускоряется или замедляется . Коэффициент заполнения более 50% считается «прогулкой», а коэффициент заполнения менее 50% — бегом. Фаза передних и задних конечностей – это временные взаимоотношения между парами конечностей. Если передние и задние конечности с одной и той же стороны начинают фазу опоры одновременно, фаза равна 0 (или 100%). Если передняя конечность той же стороны касается наземной половины цикла позже задней конечности, фаза составляет 50%.
Физиологические эффекты походки
[ редактировать ]Выбор походки может иметь последствия, выходящие за рамки немедленных изменений в движении и скорости конечностей, особенно с точки зрения вентиляции . Поскольку у ящериц и саламандр нет диафрагмы , они должны расширять и сжимать стенки своего тела, чтобы нагнетать воздух в легкие и выходить из них, но это те же самые мышцы, которые используются для боковых колебаний тела во время передвижения. Таким образом, они не могут двигаться и дышать одновременно — ситуация, называемая ограничением Кэрриера , хотя некоторые, например вараны , могут обойти это ограничение с помощью буккальной накачки . Напротив, сгибание позвоночника скачущего млекопитающего заставляет внутренние органы брюшной полости действовать как поршень, надувая и сдувая легкие, когда позвоночник животного сгибается и растягивается, увеличивая вентиляцию и обеспечивая больший обмен кислорода .
Различия между видами
[ редактировать ]Животные обычно используют разные походки в зависимости от скорости. Почти все животные способны к симметричной походке, в то время как асимметричная походка в основном свойственна млекопитающим, которые способны достаточно сгибать позвоночник для увеличения длины шага (хотя маленькие крокодилы способны использовать прыгающую походку). Походка в поперечном направлении во время ходьбы и бега наиболее распространена у млекопитающих, но древесные млекопитающие, такие как обезьяны, некоторые опоссумы и кинкажу, используют последовательность шагов по диагонали для повышения устойчивости.[3] Ходьба и бег по диагонали (также известные как рысь) чаще всего используются раскинувшимися четвероногими, такими как саламандры и ящерицы, из-за боковых колебаний их тел во время движения. Двуногие — уникальный случай, и большинство двуногих демонстрируют только три походки — ходьбу, бег и прыжки — во время естественного передвижения. Другие походки, такие как прыжки человека, не используются без преднамеренного усилия.
Походка шестиногих также хорошо описана, особенно у дрозофил и палочников (Phasmatodea). Дрозофила использует походку на треноге , при которой три ноги качаются вместе, а три ноги остаются на земле в стойке. [3] Однако изменчивость походки постоянна. У мух нет отчетливых переходов между походками, но они с большей вероятностью будут ходить на штативе на более высоких скоростях. На более низких скоростях они с большей вероятностью будут стоять на четырех или пяти ногах. [4] Координация четвероногих (когда в стойке находятся 4 ноги) — это когда диагонально противоположные пары ног качаются вместе. Волна (иногда называемая метахронной волной) описывает ходьбу, при которой за раз качается только одна нога. Это движение распространяется сзади вперед по бокам тела, а затем в противоположном направлении. Палочники, более крупные шестиногие, демонстрируют походку треноги только на личиночной стадии. Будучи взрослыми людьми с низкой скоростью, они, скорее всего, будут ходить метахрональной волной, при которой за раз качается только одна нога. На более высоких скоростях они ходят с координацией четвероногих с двумя парными ногами или метахрональной волной, перемещая только одну ногу за раз. [5]
Классификация походки по энергетике
[ редактировать ]Хотя походку можно классифицировать по шагам, новая работа, включающая кинематику всего тела и записи силовых пластин, привела к появлению альтернативной схемы классификации, основанной на механике движения . В этой схеме движения делятся на ходьбу и бег. Все походки характеризуются «прыжковым» движением тела по ногам, часто описываемым как перевернутый маятник (отображающий колебания кинетической и потенциальной энергии , которые не совпадают по фазе), механизм, описанный Джованни Каванья . При беге кинетическая и потенциальная энергия колеблются синфазно, и изменение энергии передается мышцам , костям , сухожилиям и связкам, действующим как пружины (таким образом, это описывается моделью пружинно-массовой нагрузки ).
Энергетика
[ редактировать ]
Скорость обычно определяет выбор походки: четвероногие млекопитающие переходят от ходьбы к бегу и галопу по мере увеличения скорости. Каждая из этих походок имеет оптимальную скорость, при которой расходуется минимальное количество калорий на метр, а затраты увеличиваются при более медленной или быстрой скорости. Изменения походки происходят вблизи скорости, при которой стоимость быстрой ходьбы становится выше стоимости медленного бега. Непристегнутые животные обычно передвигаются с оптимальной скоростью для своей походки, чтобы минимизировать затраты энергии. Стоимость транспорта используется для сравнения энергетики разных походок, а также походок разных животных.
Походка без четвероногих
[ редактировать ]Несмотря на различия в количестве ног, наблюдаемые у наземных позвоночных , согласно с перевернутым маятником модели ходьбы и пружинно-массовой модели бега, «прогулки» и «беги» наблюдаются у животных с 2, 4, 6 и более ногами. . Термин «походка» даже применялся к летающим и плавающим организмам, которые создают отчетливые узоры вихревых следов .
См. также
[ редактировать ]- Цикл двуногой походки
- Анализ походки
- Нарушение походки
- Походка (собака)
- Походка (человека)
- Походка лошади
- Паркинсоническая походка
Ссылки
[ редактировать ]- ^ Хильдебранд, Милтон (1 декабря 1989 г.). «Четырехногие позвоночные: время движений ног зависит от баланса, формы тела, ловкости, скорости и затрат энергии». Бионаука . 39 (11): 766. дои : 10.2307/1311182 . JSTOR 1311182 .
- ^ Таш, У.; Мубарак, П.; Тан, В.; Чжу, Л.; Лавинг, РМ; Рош, Дж.; Блох, Р.Дж. (2008). «Прибор, который одновременно измеряет пространственно-временные параметры походки и силы реакции опоры передвигающихся крыс». Том 2: Автомобильные системы; Биоинженерия и биомедицинские технологии; Вычислительная механика; Элементы управления; Динамические системы . стр. 45–49. дои : 10.1115/ESDA2008-59085 . ISBN 978-0-7918-4836-4 .
- ^ Штраус Р., Гейзенберг М. (август 1990 г.). «Координация ног при прямолинейной ходьбе и поворотах у Drosophila melanogaster». Журнал сравнительной физиологии А. 167 (3): 403–12. дои : 10.1007/BF00192575 . ПМИД 2121965 . S2CID 12965869 .
- ^ ДеАнджелис Б.Д., Заватоне-Вет Дж.А., Кларк Д.А. (июнь 2019 г.). «Дрозофила» . электронная жизнь . 8 . doi : 10.7554/eLife.46409 . ПМК 6598772 . ПМИД 31250807 .
- ^ Аяли А, Боргманн А, Бушгес А, Кузен-Фукс Э, Даун-Грюн С, Холмс П (2015). «Сравнительное исследование моделей палочников и тараканов в изучении локомоции животных». Текущее мнение в области науки о насекомых (12): 1–10. дои : 10.1016/j.cois.2015.07.004 .
Эта статья включает список общих ссылок , но в ней отсутствуют достаточные соответствующие встроенные цитаты . ( Август 2009 г. ) |
- Хильдебранд, М. (1989). «Передвижение позвоночных: введение, как движется тело животного?». Бионаука . 39 (11): 764–765. doi : 10.1093/bioscience/39.11.764 . JSTOR 1311182 .
- Хойт, Д.Ф.; Тейлор, Р.К. (1981). «Походка и энергетика передвижения лошадей». Природа . 292 (5820): 239–240. Бибкод : 1981Natur.292..239H . дои : 10.1038/292239a0 . S2CID 26841475 .
- Кэрриер, Д. (1987). «Вентиляция легких при ходьбе и беге у четырех видов ящериц». Экспериментальная биология . 47 (1): 33–42. ПМИД 3666097 .
- Брамбл, DM; Кэрриер, Д.Р. (1983). «Бег и дыхание млекопитающих». Наука . 219 (4582): 251–256. Бибкод : 1983Sci...219..251B . дои : 10.1126/science.6849136 . ПМИД 6849136 . S2CID 23551439 .
- Бликхан, Р.; Фулл, Р.Дж. (1993). «Сходство в передвижении на нескольких ногах: подпрыгивая как монопод». Журнал сравнительной физиологии А. 173 (5): 509–517. дои : 10.1007/bf00197760 . S2CID 19751464 .
- Каванья, Джорджия; Хегланд, Северная Каролина; Тейлор, Р.К. (1977). «Механическая работа при наземном передвижении: два основных механизма минимизации затрат энергии». Являюсь. Дж. Физиол . 233 (5): Р243–Р261. дои : 10.1152/ajpregu.1977.233.5.R243 . ПМИД 411381 . S2CID 15842774 .
