Сервомеханизм
Эта статья требует внимания эксперта в области машиностроения . Конкретная проблема заключается в следующем: статья посвящена широкой предметной области инженерного дела и требует серьезной доработки в дополнение к ссылкам на академические книги и учебники. ( сентябрь 2013 г. ) |
В машиностроении и технике управления сервомеханизм систему (также называемый сервосистемой или просто сервоприводом ) представляет собой управления положением и ее производными по времени , такими как скорость , механической системы . Он часто включает в себя серводвигатель и использует управление с обратной связью для уменьшения установившейся ошибки и улучшения динамического отклика. [1] При управлении с обратной связью отрицательная обратная связь, распознающая ошибки. для корректировки действия механизма используется [2] В приложениях с управлением смещением он обычно включает в себя встроенный энкодер или другой механизм обратной связи по положению, чтобы гарантировать, что выходной сигнал достигает желаемого эффекта. [3] Следование заданной траектории движения называется сервоприводом . [4] где «серво» используется как глагол . Префикс «серво» происходит от латинского слова «servus», означающего «раб». [1]
Этот термин правильно применяется только к системам, в которых сигналы обратной связи или коррекции ошибок помогают контролировать механическое положение, скорость, положение или любые другие измеримые переменные. [5] Например, автомобильный стеклоподъемник не является сервомеханизмом, поскольку здесь нет автоматической обратной связи, контролирующей положение — оператор делает это путем наблюдения. автомобиля Напротив, круиз-контроль использует обратную связь с обратной связью, что классифицирует его как сервомеханизм.
Приложения [ править ]
Контроль положения [ править ]

Распространенный тип сервопривода обеспечивает управление положением . Обычно сервоприводы бывают электрическими , гидравлическими или пневматическими . Они работают по принципу отрицательной обратной связи, когда управляющий вход сравнивается с фактическим положением механической системы, измеренным датчиком определенного типа на выходе. Любая разница между фактическими и желаемыми значениями («сигнал ошибки») усиливается (и преобразуется) и используется для управления системой в направлении, необходимом для уменьшения или устранения ошибки. Эта процедура является одним из широко используемых приложений теории управления . Типичные сервоприводы могут давать вращательный (угловой) или линейный выходной сигнал.
Контроль скорости [ править ]
Регулирование скорости с помощью регулятора — это еще один тип сервомеханизма. В паровом двигателе используются механические регуляторы; Еще одним ранним применением было управление скоростью водяных колес . До Второй мировой войны винт постоянной скорости был разработан для управления частотой вращения двигателя маневрирующих самолетов. В средствах контроля топлива газотурбинных двигателей используется либо гидромеханическое, либо электронное управление.
Другие [ править ]
Сервомеханизмы позиционирования впервые были использованы в военном оборудовании управления огнем и морской навигации . Сегодня сервомеханизмы применяются в станках-автоматах , антеннах спутникового слежения, самолетах с дистанционным управлением, автоматических системах навигации на лодках и самолетах, системах управления зенитно-артиллерийскими установками. Другими примерами являются электродистанционные системы в самолетах , в которых для приведения в действие рулевых поверхностей самолета используются сервоприводы, а также радиоуправляемые модели , в которых для той же цели используются радиоуправляемые сервоприводы. Многие камеры с автофокусировкой также используют сервомеханизм для точного перемещения объектива. Жесткий диск оснащен магнитной сервосистемой с точностью позиционирования субмикрометра. В промышленных машинах сервоприводы используются для выполнения сложных движений во многих приложениях.
Серводвигатель [ править ]

Серо-зеленый цилиндр — это щеточного типа двигатель постоянного тока . В черной секции внизу находится планетарный редуктор , а черный объект в верхней части двигателя — это оптический поворотный энкодер для обратной связи по положению.
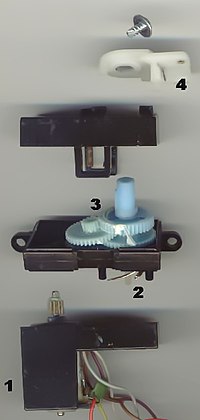
1. электродвигатель
2. потенциометр обратной связи по положению
3. редуктор
4. рычаг привода
Серводвигатель — это особый тип двигателя, который в сочетании с поворотным энкодером или потенциометром образует сервомеханизм. Этот узел, в свою очередь, может являться частью другого сервомеханизма. Потенциометр выдает простой аналоговый сигнал для указания положения, а энкодер обеспечивает обратную связь по положению и обычно по скорости, что с помощью ПИД-регулятора позволяет более точно контролировать положение и, следовательно, быстрее достигать стабильного положения (при заданной мощности двигателя). . Потенциометры подвержены дрейфу при изменении температуры, тогда как энкодеры более стабильны и точны.
Серводвигатели используются как в высокопроизводительных, так и в низкопроизводительных приложениях. На верхнем уровне находятся прецизионные промышленные компоненты, в которых используется поворотный энкодер. На нижнем уровне находятся недорогие сервоприводы с радиоуправлением (RC-сервоприводы), используемые в радиоуправляемых моделях , в которых используется свободно вращающийся двигатель и простой датчик положения потенциометра со встроенным контроллером. Термин «серводвигатель» обычно относится к высокотехнологичному промышленному компоненту, тогда как термин «сервопривод» чаще всего используется для описания недорогих устройств, в которых используется потенциометр. Шаговые двигатели не считаются серводвигателями, хотя они также используются для создания более крупных сервомеханизмов. Шаговым двигателям присуще угловое позиционирование из-за их конструкции, и оно обычно используется в разомкнутом контуре без обратной связи. Они обычно используются для приложений средней точности. [6]
RC-сервоприводы используются для приведения в действие различных механических систем, таких как рулевое управление автомобиля, поверхности управления самолетом или руль направления лодки. Благодаря своей доступности, надежности и простоте управления с помощью микропроцессоров они часто используются в небольших робототехнических приложениях. Стандартный RC-приемник (или микроконтроллер) посылает широтно-импульсной модуляции на сервопривод сигналы (ШИМ). Электроника внутри сервопривода преобразует ширину импульса в нужное положение. Когда сервопривод получает команду на вращение, на двигатель подается питание до тех пор, пока потенциометр не достигнет значения, соответствующего заданному положению.
История [ править ]

Джеймса Уатта обычно парового двигателя Регулятор считается первой системой обратной связи с приводом. Ветряная мельница является более ранним примером автоматического управления, но, поскольку она не имеет усилителя или коэффициента усиления , ее обычно не считают сервомеханизмом.
Первым устройством управления положением с обратной связью был корабельный рулевой двигатель , использовавшийся для позиционирования руля больших кораблей в зависимости от положения корабельного штурвала. Джон Макфарлейн Грей был пионером. Его запатентованная конструкция была использована на SS Great Eastern в 1866 году. Джозеф Фаркот, возможно, заслуживает равной похвалы за концепцию обратной связи, поскольку в период с 1862 по 1868 год он получил несколько патентов. [7]
Телемотор был изобретен примерно в 1872 году Эндрю Беттсом Брауном , что позволило значительно упростить сложные механизмы между диспетчерской и двигателем. [8] Паровые рулевые двигатели имели характеристики современного сервомеханизма: вход, выход, сигнал ошибки и средство усиления сигнала ошибки, используемое для отрицательной обратной связи, чтобы свести ошибку к нулю. Рагонне Механизм реверса мощности представлял собой сервоусилитель общего назначения с воздушным или паровым приводом для линейного движения, запатентованный в 1909 году. [9]
Электрические сервомеханизмы использовались еще в 1888 году в Элиши Грея телеавтографе .
Электрические сервомеханизмы требуют усилителя мощности. Во время Второй мировой войны были разработаны электрические сервомеханизмы управления огнем , в которых использовался амплидин в качестве усилителя мощности . Ламповые усилители использовались в UNISERVO стримере UNIVAC I. для компьютера Королевский флот начал экспериментировать с дистанционным управлением питанием ( RPC ) на HMS Champion в 1928 году и начал использовать RPC для управления прожекторами в начале 1930-х годов. Во время Второй мировой войны РПК использовался для управления артиллерийскими установками и наводками орудий.
В современных сервомеханизмах используются полупроводниковые усилители мощности, обычно построенные на основе МОП-транзисторов или тиристоров . Небольшие сервоприводы могут использовать силовые транзисторы .
Считается, что слово происходит от французского слова « Le Servomoteur » или «ведомый двигатель», впервые использованного Дж. Дж. Л. Фаркотом в 1868 году для описания гидравлических и паровых двигателей, используемых в управлении судами. [10]
Самый простой тип сервоприводов использует управление «взрыв-взрыв» . В более сложных системах управления используются пропорциональное управление, ПИД-регулирование и управление в пространстве состояний, которые изучаются в современной теории управления .
Виды выступлений [ править ]
Сервоприводы можно классифицировать по системам управления с обратной связью: [11]
- Сервоприводы типа 0: в установившихся условиях они выдают постоянное значение выходного сигнала с постоянным сигналом ошибки;
- Сервоприводы типа 1: в установившихся условиях они выдают постоянное значение выходного сигнала с нулевым сигналом ошибки, но постоянная скорость изменения задания подразумевает постоянную ошибку в отслеживании задания;
- Сервоприводы типа 2: в установившихся условиях они выдают постоянное значение выходного сигнала с нулевым сигналом ошибки. Постоянная скорость изменения задания подразумевает нулевую ошибку при отслеживании задания. Постоянная скорость ускорения эталона подразумевает постоянную ошибку в отслеживании эталона.
Полоса пропускания сервопривода указывает на способность сервопривода следовать быстрым изменениям входного командного сигнала.
См. также [ править ]
- Двигатель дробной мощности
- Управление движением
- Сервоуправление
- Synchro , разновидность двигателя передатчика и приемника, используемая в сервомеханизмах.
Дальнейшее чтение [ править ]
- Беннетт, С. (1993). История техники управления 1930–1955 гг . Лондон: Peter Peregrinus Ltd. От имени Института инженеров-электриков. ISBN 0-86341-280-7 .
- Сюэ-Шен Цянь (1954) Инженерная кибернетика , МакГроу Хилл , ссылка из HathiTrust
Ссылки [ править ]
- ↑ Перейти обратно: Перейти обратно: а б Эскюдье, Марсель; Аткинс, Тони (2019). Машиностроительный словарь (2-е изд.). Издательство Оксфордского университета. doi : 10.1093/acref/9780198832102.001.0001 . ISBN 978-0-19-883210-2 .
- ^ Baldor Electric Company – Факты о сервоуправлении . По состоянию на 25 сентября 2013 г.
- ^ Автоматизация Анахайма: Руководство по серводвигателям . По состоянию на 25 сентября 2013 г.
- ^ Кларенс В. де Сильва. Мехатроника: комплексный подход (2005). ЦРК Пресс. п. 787.
- ^ Определение BusinessDictionary.com. Архивировано 27 марта 2017 г. на Wayback Machine . По состоянию на 25 сентября 2013 г.
- ^ «Как управлять серводвигателем и его промышленное применение» . Компоненты CSE . Проверено 31 января 2023 г.
- ^ Беннетт, Стюарт (1 января 1986 г.). История техники управления, 1800–1930 гг . ИЭПП. стр. 98–100. ISBN 978-0-86341-047-5 .
- ^ Эндрю Беттс Браун
- ↑ Юджин Л. Рагонне, Механизм управления локомотивами, патент США 930,225 , 9 августа 1909 г.
- ^ Журнал IEEE Industry Applications, март/апрель 1996 г., стр. 74.
- ^ Г.В. Юнкин, Промышленные системы сервоуправления – основы и приложения – второе издание, Тейлор и Фрэнсис, 2007.