Широтно-импульсная модуляция
Эта статья нуждается в дополнительных цитатах для проверки . ( апрель 2009 г. ) |

| полосы пропускания Модуляция |
|---|
 |
| Аналоговая модуляция |
| Цифровая модуляция |
| Иерархическая модуляция |
| Распространение спектра |
| См. также |
Широтно-импульсная модуляция ( ШИМ ), также известная как широтно-импульсная модуляция ( ШИМ ) или широтно-импульсная модуляция ( ПЛМ ), [1] — это любой метод представления сигнала в виде прямоугольной волны с изменяющимся рабочим циклом (а для некоторых методов также с изменяющимся периодом ).
ШИМ полезен для управления средней мощностью или амплитудой электрического сигнала. Среднее значение напряжения (и тока ), подаваемого на нагрузку, контролируется путем переключения источника питания от 0 до 100% со скоростью, большей, чем требуется для значительного изменения нагрузки. Чем дольше переключатель включен, тем выше общая мощность, подаваемая в нагрузку. Наряду с отслеживанием точки максимальной мощности (MPPT), это один из основных методов контроля мощности солнечных панелей до уровня, который может быть использован батареей. [2] ШИМ особенно подходит для управления инерционными нагрузками, такими как двигатели, на которые не так легко влияет такое дискретное переключение. Целью ШИМ является управление нагрузкой; однако частота переключения ШИМ должна выбираться тщательно, чтобы это происходило плавно.
Частота переключения ШИМ может сильно различаться в зависимости от нагрузки и применения. Например, в электрической плите переключение приходится производить всего несколько раз в минуту; 100 или 120 Гц (двойная частота сети ) в диммере лампы ; от нескольких килогерц (кГц) до десятков кГц для моторного привода; и даже в десятки или сотни кГц в аудиоусилителях и компьютерных источниках питания. Выбор слишком высокой для данного применения частоты переключения может привести к преждевременному выходу из строя компонентов механического управления, несмотря на плавное управление нагрузкой. Выбор частоты переключения, слишком низкой для данного применения, приводит к колебаниям нагрузки. Основным преимуществом ШИМ является то, что потери мощности в коммутационных устройствах очень малы. Когда ключ выключен, ток практически отсутствует, а когда он включен и мощность передается на нагрузку, падения напряжения на переключателе почти нет. Таким образом, потери мощности, являющиеся произведением напряжения и тока, в обоих случаях близки к нулю. ШИМ также хорошо работает с цифровыми элементами управления, которые благодаря своей природе включения/выключения могут легко установить необходимый рабочий цикл. ШИМ также использовался в некоторых системы связи , в которых рабочий цикл использовался для передачи информации по каналу связи.
В электронике многие современные микроконтроллеры (MCU) интегрируют ШИМ-контроллеры, подключенные к внешним контактам, в качестве периферийных устройств под управлением встроенного ПО . Они обычно используются для постоянного тока (DC) управления двигателями в робототехнике , регулировании импульсных источников питания и других приложениях.
Рабочий цикл
[ редактировать ]Термин рабочий цикл описывает соотношение времени включения к регулярному интервалу или «периоду» времени; низкий рабочий цикл соответствует низкой мощности, поскольку большую часть времени питание отключено. Рабочий цикл выражается в процентах, при полном включении 100%. Когда цифровой сигнал включен половину времени и выключен другую половину времени, цифровой сигнал имеет рабочий цикл 50% и напоминает «прямоугольную» волну. Когда цифровой сигнал находится во включенном состоянии больше времени, чем в выключенном, его рабочий цикл составляет >50%. Когда цифровой сигнал находится в выключенном состоянии больше времени, чем во включенном, его рабочий цикл составляет <50%. Вот рисунок, иллюстрирующий эти три сценария:

История
[ редактировать ]был Паровой двигатель Корлисса запатентован в 1849 году. В нем использовалась широтно-импульсная модуляция для управления впускным клапаном цилиндра парового двигателя. Центробежный регулятор использовался для обеспечения автоматической обратной связи.
Некоторым машинам (например, двигателю швейной машины ) требуется частичная или переменная мощность. Раньше управление (например, в ножной педали швейной машины) осуществлялось с помощью реостата, подключенного последовательно с двигателем, для регулировки величины тока, протекающего через двигатель. Это была неэффективная схема, поскольку при этом также тратилась энергия в виде тепла в резисторном элементе реостата, но она была терпимой, поскольку общая мощность была низкой. Хотя реостат был одним из нескольких методов управления мощностью (дополнительную информацию см. в разделах «Автотрансформаторы» и «Вариак» ), недорогой и эффективный метод переключения/регулировки мощности еще не был найден. Этот механизм также должен был иметь возможность приводить в движение двигатели вентиляторов, насосов и роботизированных сервомеханизмов , а также должен был быть достаточно компактным, чтобы взаимодействовать с диммерами ламп. ШИМ появился как решение этой сложной проблемы.
Компания Philips, штат Невада, разработала систему оптического сканирования ( опубликованную в 1946 году) для с изменяемой площадью фильма звуковой дорожки , которая создавала ШИМ. Он был предназначен для снижения шума при воспроизведении саундтрека к фильму. Предложенная система имела порог между «белой» и «черной» частями звуковой дорожки. [3]
Одним из первых применений ШИМ был Sinclair X10, аудиоусилитель мощностью 10 Вт, доступный в виде комплекта в 1960-х годах. Примерно в то же время ШИМ начали использовать для управления двигателями переменного тока. [4]
Следует отметить, что в течение примерно столетия некоторые электродвигатели с регулируемой скоростью имели приличный КПД, но они были несколько сложнее, чем двигатели с постоянной скоростью, и иногда требовали громоздких внешних электрических устройств, таких как блок резисторов переменной мощности или вращающихся преобразователей. такие как диск Уорда Леонарда .
Принцип
[ редактировать ]Периодическая пульсовая волна
[ редактировать ]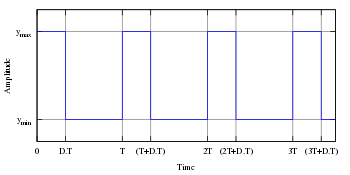


Если рассматривать периодическую пульсовую волну с периодом , низкая стоимость , высокое значение и постоянным рабочим циклом D (рис. 1), среднее значение формы сигнала определяется выражением:



Как пульсовая волна, ее значение для и для . Тогда приведенное выше выражение принимает вид:



Последнее выражение можно довольно упростить во многих случаях, когда как . Отсюда среднее значение сигнала ( ) напрямую зависит от рабочего цикла D.



Однако, изменяя (то есть модулируя) рабочий цикл (и, возможно, также период), следующие более совершенные волны с широтно-импульсной модуляцией позволяют изменять среднее значение формы сигнала.
Интерсекционный метод ШИМ
[ редактировать ]
Метод пересечения — это простой способ генерировать выходной сигнал ШИМ (пурпурный на рисунке выше) с фиксированным периодом и изменяющимся рабочим циклом с помощью компаратора для переключения состояния выхода ШИМ, когда форма входного сигнала (красный) пересекается с пилообразным или треугольная форма волны (синий).
В зависимости от типа пилообразного или треугольного сигнала (зеленый на рисунке ниже), пересекающиеся сигналы ШИМ (синие на рисунке ниже) можно выравнивать тремя способами:

- Модуляция по переднему фронту (верхний график) использует обратную пилообразную волну для генерации ШИМ. Передний фронт ШИМ удерживается на переднем крае окна, а задний фронт модулируется.
- Модуляция по заднему фронту (средний график) использует обычную пилообразную волну для генерации ШИМ. Задний фронт ШИМ фиксирован, а передний фронт модулируется.
- Центрированные импульсы (внизу) используют треугольную форму сигнала для генерации ШИМ. Центр импульса фиксируется в центре временного окна, а оба края импульса перемещаются для сжатия или расширения ширины.
Пропорционирование времени
[ редактировать ]Многие цифровые схемы могут генерировать сигналы ШИМ (например, многие микроконтроллеры имеют выходы ШИМ). Обычно они используют счетчик , который периодически увеличивается (он прямо или косвенно подключен к тактовому сигналу схемы) и сбрасывается в конце каждого периода ШИМ. Когда значение счетчика превышает опорное значение, выход ШИМ меняет состояние с высокого на низкий (или с низкого на высокий). [5] Этот метод называется пропорциональным временем, в частности, управлением пропорциональным временем. [6] – какая часть фиксированного времени цикла проводится в высоком состоянии.
Увеличивающийся и периодически сбрасываемый счетчик представляет собой дискретную версию пилообразного метода пересекающегося метода. Аналоговый компаратор метода пересечения представляет собой простое целочисленное сравнение между текущим значением счетчика и цифровым (возможно, оцифрованным) опорным значением. Рабочий цикл можно изменять только дискретными шагами в зависимости от разрешения счетчика. Однако счетчик с высоким разрешением может обеспечить вполне удовлетворительную производительность.
Спектр
[ редактировать ]Полученные спектры (трех выравниваний) аналогичны. Каждый из них содержит компонент постоянного тока , базовую боковую полосу, содержащую модулирующий сигнал, и фазово-модулированные несущие на каждой гармонике частоты импульса. Амплитуды групп гармоник ограничены конверт ( функция sinc ) и простирается до бесконечности. Бесконечная полоса пропускания вызвана нелинейной работой широтно-импульсного модулятора. Как следствие, цифровой ШИМ страдает от искажений , связанных с наложением спектров , что значительно снижает его применимость для современных систем связи . Ограничивая полосу пропускания ядра ШИМ, можно избежать эффектов наложения спектров. [7]

Напротив, дельта-модуляция и дельта-сигма-модуляция являются случайными процессами. [ нужны разъяснения ] что дает непрерывный спектр без отчетливых гармоник. В то время как пересекающаяся ШИМ использует фиксированный период, но изменяющийся рабочий цикл, период ШИМ с дельта- и дельта-сигма-модулацией варьируется в дополнение к их рабочему циклу.
Дельта-модуляция
[ редактировать ]
Дельта-модуляция создает сигнал ШИМ (пурпурный на рисунке выше), который меняет состояние всякий раз, когда его интеграл (синий) достигает пределов (зеленый), окружающих вход (красный).
Асинхронная дельта-сигма ШИМ
[ редактировать ]
Асинхронная (т.е. несинхронизированная) дельта-сигма-модуляция создает выходной сигнал ШИМ (синий на нижнем графике), который вычитается из входного сигнала (зеленый на верхнем графике) для формирования сигнала ошибки (синий на верхнем графике). Эта ошибка интегрирована (пурпурный цвет в середине графика). Когда интеграл ошибки превышает пределы (верхняя и нижняя серые линии на среднем графике), выход ШИМ меняет состояние. Интегрируя разницу ошибки с входным сигналом, дельта-сигма-модуляция формирует шум результирующего спектра так, чтобы он был больше на более высоких частотах выше полосы входного сигнала.
Пространственная векторная модуляция
[ редактировать ]Пространственно-векторная модуляция — это алгоритм управления ШИМ для генерации многофазного переменного тока, в котором опорный сигнал регулярно дискретизируется; после каждой выборки ненулевые активные векторы переключения, соседние с опорным вектором, и один или несколько нулевых векторов переключения выбираются для соответствующей доли периода выборки, чтобы синтезировать опорный сигнал как среднее значение используемых векторов.
Прямой контроль крутящего момента (DTC)
[ редактировать ]Прямое управление крутящим моментом — это метод, используемый для управления двигателями переменного тока. Он тесно связан с дельта-модуляцией (см. выше). Оцениваются крутящий момент двигателя и магнитный поток, и они контролируются, чтобы оставаться в пределах диапазона гистерезиса, путем включения новой комбинации полупроводниковых переключателей устройства каждый раз, когда любой сигнал пытается выйти за пределы своего диапазона.
Теорема выборки ШИМ
[ редактировать ]Процесс преобразования ШИМ является нелинейным, и обычно предполагается, что восстановление сигнала фильтра нижних частот несовершенно для ШИМ. Теорема выборки ШИМ [8] показывает, что преобразование ШИМ может быть идеальным:
Любой низкочастотный сигнал с ограниченной полосой частот , амплитуда которого находится в пределах ±0,637, может быть представлен сигналом ШИМ с единичной амплитудой (±1). Количество импульсов в сигнале равно количеству выборок Найквиста , а ограничение пика не зависит от того, является ли сигнал двухуровневым или трехуровневым.
Для сравнения теорему выборки Найквиста-Шеннона можно резюмировать следующим образом:
Если у вас есть сигнал, полоса пропускания которого ограничена значением f 0 , вы можете собрать всю информацию, содержащуюся в этом сигнале, путем его дискретизации в дискретные моменты времени, если ваша частота дискретизации превышает 2f 0 . [9]
Приложения
[ редактировать ]Сервоприводы
[ редактировать ]ШИМ используется для управления сервомеханизмами ; см . сервоуправление .
Телекоммуникации
[ редактировать ]В телекоммуникациях ШИМ — это форма модуляции сигнала , при которой ширина импульсов соответствует конкретным значениям данных, закодированным на одном конце и декодированным на другом.
Импульсы различной длины (сама информация) будут посылаться через равные промежутки времени (несущая частота модуляции).
_ _ _ _ _ _ _ _
| | | | | | | | | | | | | | | |
Clock | | | | | | | | | | | | | | | |
__| |____| |____| |____| |____| |____| |____| |____| |____
_ __ ____ ____ _
PWM signal | | | | | | | | | |
| | | | | | | | | |
_________| |____| |___| |________| |_| |___________
Data 0 1 2 4 0 4 1 0
Включение тактового сигнала не является необходимым, поскольку передний фронт сигнала данных может использоваться в качестве тактового сигнала, если к каждому значению данных добавляется небольшое смещение, чтобы избежать значения данных с импульсом нулевой длины.
_ __ ___ _____ _ _____ __ _
| | | | | | | | | | | | | | | |
PWM signal | | | | | | | | | | | | | | | |
__| |____| |___| |__| |_| |____| |_| |___| |_____
Data 0 1 2 4 0 4 1 0
Доставка электроэнергии
[ редактировать ]ШИМ можно использовать для управления количеством мощности, подаваемой на нагрузку, без потерь, которые могут возникнуть в результате линейной подачи мощности резистивными средствами. Недостатком этого метода является то, что мощность, потребляемая нагрузкой, не является постоянной, а скорее прерывистой (см. Понижающий преобразователь ), и энергия, подаваемая в нагрузку, также не является непрерывной. Однако нагрузка может быть индуктивной, и при достаточно высокой частоте и при необходимости использования дополнительных пассивных электронных фильтров можно сгладить последовательность импульсов и восстановить усредненную аналоговую форму сигнала. Поток мощности в нагрузку может быть непрерывным. Поток мощности от источника питания не является постоянным и в большинстве случаев потребует накопления энергии на стороне источника питания. (В случае электрической цепи — конденсатор для поглощения энергии, запасенной в (часто паразитной) индуктивности на стороне питания.)
Высокочастотные системы управления мощностью ШИМ легко реализовать с помощью полупроводниковых переключателей. Как объяснялось выше, мощность переключателя практически не рассеивается ни во включенном, ни в выключенном состоянии. Однако во время переходов между состояниями «включено» и «выключено» напряжение и ток отличны от нуля, и поэтому мощность рассеивается в переключателях. Благодаря быстрому изменению состояния между полностью включенным и полностью выключенным состоянием (обычно менее 100 наносекунд) рассеиваемая мощность в переключателях может быть довольно низкой по сравнению с мощностью, подаваемой в нагрузку.
Современные полупроводниковые переключатели, такие как МОП-транзисторы или биполярные транзисторы с изолированным затвором (IGBT), хорошо подходят для высокоэффективных контроллеров. Преобразователи частоты, используемые для управления двигателями переменного тока, могут иметь КПД, превышающий 98%. Импульсные источники питания имеют меньший КПД из-за низкого уровня выходного напряжения (часто для микропроцессоров требуется даже менее 2 В), но все же можно достичь КПД более 70–80%.
с регулируемой скоростью Контроллеры компьютерных вентиляторов обычно используют ШИМ, поскольку он гораздо более эффективен по сравнению с потенциометром или реостатом . (Ни один из последних непрактичен для электронного управления; для них потребуется небольшой приводной двигатель.)
В диммерах для домашнего использования используется особый тип ШИМ-управления. Диммеры для домашнего использования обычно включают в себя электронную схему, которая подавляет протекание тока в течение определенных частей каждого цикла сетевого напряжения переменного тока. Регулировка яркости света, излучаемого источником света, в этом случае представляет собой просто вопрос настройки того, при каком напряжении (или фазе) в полупериоде переменного тока диммер начинает подавать электрический ток на источник света (например, с помощью электронного переключателя, такого как триак ) . В этом случае рабочий цикл ШИМ представляет собой отношение времени проводимости к продолжительности полупериода переменного тока, определяемой частотой сетевого напряжения переменного тока (50 Гц или 60 Гц в зависимости от страны).
Эти довольно простые типы диммеров можно эффективно использовать с инертными (или относительно медленно реагирующими) источниками света, такими как, например, лампы накаливания, у которых дополнительная модуляция подаваемой электрической энергии, вызываемая диммером, вызывает лишь незначительные дополнительные колебания яркости. излучаемый свет. Однако некоторые другие типы источников света, такие как светодиоды (LED), включаются и выключаются очень быстро и заметно мерцают, если на них подается низкочастотное напряжение возбуждения. Ощутимый эффект мерцания от таких быстродействующих источников света можно уменьшить за счет увеличения частоты ШИМ. Если колебания света достаточно быстрые (быстрее порога слияния мерцаний ), зрительная система человека больше не может их различать, и глаз воспринимает среднюю по времени интенсивность без мерцания.
В электрических плитах к нагревательным элементам, таким как варочная панель или гриль, подается плавная регулировка мощности с помощью устройства, известного как simmerstat . Он состоит из термогенератора, работающего со скоростью примерно два цикла в минуту, и механизм изменяет рабочий цикл в зависимости от положения ручки. Термическая постоянная времени нагревательных элементов составляет несколько минут, поэтому колебания температуры слишком малы, чтобы иметь значение на практике.
Регулирование напряжения
[ редактировать ]ШИМ также используется в эффективных стабилизаторах напряжения . При переключении напряжения на нагрузку с соответствующим рабочим циклом выходное напряжение будет приближаться к желаемому уровню. Шум переключения обычно фильтруется с помощью катушки индуктивности и конденсатора .
Один метод измеряет выходное напряжение. Когда оно ниже желаемого напряжения, он включает переключатель. Когда выходное напряжение превышает желаемое, переключатель выключается.
Аудиоэффекты и усиление
[ редактировать ]Изменение рабочего цикла импульсного сигнала в синтезаторе создает полезные тембральные вариации. Некоторые синтезаторы имеют триммер рабочего цикла для прямоугольных выходных сигналов, и этот триммер можно настроить на слух; точка 50% (истинная прямоугольная волна) была отличительной, потому что четные гармоники практически исчезают при 50%. Пульсовые волны, обычно 50%, 25% и 12,5%, составляют саундтреки классических видеоигр . Термин ШИМ, используемый в синтезе звука (музыки), относится к соотношению между высоким и низким уровнем, вторично модулируемым низкочастотным генератором . Это дает звуковой эффект, похожий на хор или слегка расстроенные осцилляторы, играющие вместе. (Фактически, ШИМ эквивалентна сумме двух пилообразных волн , одна из которых инвертирована.) [10]
Усилители класса D создают ШИМ-эквивалент входного сигнала более низкой частоты, который можно отправить на громкоговоритель через подходящую сеть фильтров для блокировки несущей и восстановления исходного низкочастотного сигнала. Поскольку они переключают питание непосредственно с шины высокого и низкого напряжения, эти усилители имеют КПД более 90% и могут быть относительно компактными и легкими даже при большой выходной мощности. В течение нескольких десятилетий широко использовались промышленные и военные усилители ШИМ, часто для управления серводвигателями . Катушки градиента поля в аппаратах МРТ приводятся в действие относительно мощными усилителями ШИМ.
использовалась грубая форма ШИМ Исторически для воспроизведения цифрового звука PCM на динамике ПК , которая управляется только двумя уровнями напряжения, обычно 0 В и 5 В. Тщательно рассчитывая длительность импульсов и полагаясь на Благодаря физическим свойствам фильтрации динамика (ограниченная частотная характеристика, самоиндукция и т. д.) удалось получить приблизительное воспроизведение монофонических сэмплов PCM, хотя и с очень низким качеством и с сильно различающимися результатами в разных реализациях. Sega 32X использует ШИМ для воспроизведения звука на основе сэмплов в своих играх.
В последнее время был введен метод кодирования звука Direct Stream Digital , который использует обобщенную форму широтно-импульсной модуляции, называемую модуляцией плотности импульса , с достаточно высокой частотой дискретизации (обычно порядка МГц), чтобы охватить всю акустическую зону. диапазон частот с достаточной точностью. Этот метод используется в формате SACD , и воспроизведение кодированного аудиосигнала по сути аналогично методу, используемому в усилителях класса D.
Электрический
[ редактировать ]Сигналы SPWM (синусно-треугольная широтно-импульсная модуляция) используются в конструкции микроинверторов (используемых в солнечной и ветровой энергетике). Эти сигналы переключения подаются на полевые транзисторы , которые используются в устройстве. Эффективность устройства зависит от гармонического содержания ШИМ-сигнала. Существует множество исследований по устранению нежелательных гармоник и улучшению основной силы, некоторые из которых включают использование модифицированного несущего сигнала вместо классического пилообразного сигнала. [11] [12] [13] для уменьшения потерь мощности и повышения эффективности. Другое распространенное применение — робототехника, где сигналы ШИМ используются для управления скоростью робота путем управления двигателями.
Мягко мигающий светодиодный индикатор
[ редактировать ]Методы ШИМ обычно используются для того, чтобы какой-либо индикатор (например, светодиод ) «мягко мигал». Свет будет медленно переходить от темноты к полной интенсивности и снова медленно тускнеть до темноты. Потом это повторяется. Период может составлять от нескольких плавных миганий в секунду до нескольких секунд для одного мигания. Индикатор такого типа не будет беспокоить так сильно, как «сильно мигающий» индикатор включения/выключения. индикаторная лампа на Apple iBook G4, PowerBook 6,7 (2005 г.) Именно такого типа была . Такой индикатор еще называют «пульсирующим свечением», а не «мигающим».
См. также
[ редактировать ]- Преобразователь аналогового сигнала в дискретный временной интервал
- Усилитель класса D
- Управление вентилятором компьютера
- Дельта-модуляция с плавным изменением наклона
- Дельта-сигма модуляция
- H-мост
- Амплитудно-импульсная модуляция
- Импульсно-кодовая модуляция
- Плотно-импульсная модуляция
- Частотно-импульсная модуляция
- Импульсно-позиционная модуляция
- радиоуправление
- Случайная широтно-импульсная модуляция
- RC сервопривод
- Управление скользящим режимом - обеспечивает плавное поведение за счет прерывистого переключения в системах.
- Пространственная векторная модуляция
- Звуковой чип
Ссылки
[ редактировать ]- ^ Баттерфилд, Эндрю Дж.; Шимански, Джон, ред. (2018). «Словарь по электронике и электротехнике» . Оксфордский справочник . doi : 10.1093/acref/9780198725725.001.0001 . ISBN 978-0-19-872572-5 .
- ^ «Определение фотоэлектрической системы с привязкой к сети... с резервной батареей» . Журнал «Домашняя энергия» .
- ^ Вестмийзе, WK (1946). «Новый метод противодействия шуму при воспроизведении звуковых фильмов» . Журнал Общества киноинженеров . 47 (5): 426–440. дои : 10.5594/J12769 . ISSN 0097-5834 . Архивировано из оригинала 6 сентября 2022 г. - через IEEE.
- ^ Файнинг, А.; Стеммлер, Х. (август 1964 г.). «Регулируемый трехфазный реверсивный привод с управляемым инвертором методом недолета». Объявления BBC . 51 (8/9): 555–577.
- ^ Барр, Майкл (1 сентября 2001 г.). «Введение в широтно-импульсную модуляцию (ШИМ)» . Группа Барр .
- ^ Основы систем управления HVAC, Роберт МакДауэлл, стр. 21
- ^ Хаусмайр, Катарина; Шули Чи; Питер Сингерл; Кристиан Фогель (февраль 2013 г.). «Цифровая широтно-импульсная модуляция без наложений для радиочастотных передатчиков пакетного режима». Транзакции IEEE в схемах и системах I: Регулярные статьи . 60 (2): 415–427. CiteSeerX 10.1.1.454.9157 . дои : 10.1109/TCSI.2012.2215776 . S2CID 21795841 .
- ^ Дж. Хуанг, К. Падманабхан и О. М. Коллинз, «Теорема выборки с импульсами переменной ширины с постоянной амплитудой», транзакции IEEE по схемам и системам, том. 58, стр. 1178–1190, июнь 2011 г.
- ^ Уэскотт, Тим (14 августа 2018 г.). «Отбор проб: чего не сказал Найквист и что с этим делать» (PDF) . Уэскотт Дизайнерские Услуги.
Теорема выборки Найквиста-Шеннона полезна, но ее часто неправильно используют, когда инженеры устанавливают частоту дискретизации или разрабатывают фильтры сглаживания.
- ^ «Синтезирование струн: ШИМ и звуки струн» . www.soundonsound.com .
- ^ Хирак Патангия, Шри Никхил Гупта Гурисетти, «Гармонически превосходный модулятор с широкой полосой частот и возможностью настройки в реальном времени», Международный симпозиум IEEE по электронному дизайну (ISED), Индия, 11 декабря.
- ^ Хирак Патангия, Шри Никхил Гупта Гурисетти, «Устранение гармоник в реальном времени с использованием модифицированной несущей», CONIELECOMP, Мексика, февраль 2012 г.
- ^ Хирак Патангия, Шри Нихил Гупта Гурисетти, «Новая стратегия избирательного устранения гармоник на основе модели синусоидальной ШИМ», MWSCAS, США, август 2012 г.