Коммутируемый реактивный двигатель

Включаемый реактивный двигатель ( SRM ) является разновидностью реактивного двигателя . В отличие от коллекторных двигателей постоянного тока мощность подается на обмотки статора (корпуса) , а не на ротор . Это упрощает механическую конструкцию, поскольку мощность не нужно подавать на движущийся ротор, что устраняет необходимость в коммутаторе . Однако это усложняет электрическую конструкцию, поскольку система переключения должна подавать мощность на различные обмотки и ограничивать пульсации крутящего момента . [1] [2] Источники расходятся во мнениях относительно того, является ли это типом шагового двигателя . [3]
Самый простой SRM имеет самую низкую стоимость конструкции среди всех электродвигателей. Промышленные двигатели могут иметь некоторое снижение стоимости из-за отсутствия обмоток ротора или постоянных магнитов. Обычное использование включает приложения, в которых ротор должен оставаться неподвижным в течение длительного времени, а также в потенциально взрывоопасных средах , таких как горнодобывающая промышленность, поскольку коммутация не требуется.
Обмотки SRM электрически изолированы друг от друга, что обеспечивает более высокую отказоустойчивость, чем у асинхронных двигателей . Оптимальная форма сигнала привода не является чистой синусоидой из-за нелинейного крутящего момента относительно смещения ротора и сильно зависящей от положения индуктивности обмоток.
История
[ редактировать ]Первый патент был получен У. Тэйлором в 1838 году в США. [4]
Принципы приводов SR были описаны примерно в 1970 году. [5] и улучшен Питером Лоуренсоном и другими, начиная с 1980 года. [6] В то время некоторые эксперты считали эту технологию неосуществимой. [7] Практическое применение было ограничено, отчасти из-за проблем с контролем и неподходящим применением, а также из-за того, что низкие объемы производства приводят к более высоким затратам . [8] [1] [9]
Принцип работы
[ редактировать ]SRM имеет намотанные катушки возбуждения, как в двигателе постоянного тока, для обмоток статора. Однако ротор не имеет прикрепленных магнитов или катушек. Это сплошной ротор с явнополюсными полюсами (с выступающими магнитными полюсами), изготовленный из магнитомягкого материала, обычно ламинированной стали. ротора Когда питание подается на обмотку статора, магнитное сопротивление создает силу, которая пытается выровнять полюс ротора с ближайшим полюсом статора.
Для поддержания вращения электронная система управления последовательно включает обмотки последовательных полюсов статора так, чтобы магнитное поле статора «вело» полюс ротора, тянув его вперед. Вместо использования механического коммутатора для переключения тока обмотки, как в традиционных двигателях, в вентильно-индукторном двигателе используется электронный датчик положения для определения угла вала ротора и полупроводниковая электроника для переключения обмоток статора, что обеспечивает динамическое управление импульсом. время и форма. Это отличается от внешне похожего асинхронного двигателя , который также подает питание на обмотки во вращающейся фазовой последовательности.
В SRM намагниченность ротора фиксирована, то есть выступающие «северные» полюса остаются неизменными при вращении двигателя. Напротив, асинхронный двигатель имеет скольжение, то есть он вращается медленнее, чем магнитное поле в статоре.
Отсутствие проскальзывания в SRM позволяет точно знать положение ротора, позволяя двигателю двигаться медленно, вплоть до полной остановки.
Простое переключение
[ редактировать ]Если на полюса A0 и A1 подано напряжение, ротор выровняется по этим полюсам. Как только это произойдет, полюса статора могут быть обесточены до того, как на полюса статора B0 и B1 будет подано напряжение. Ротор теперь расположен на полюсах статора b. Эта последовательность продолжается до c, прежде чем вернуться к началу. Эту последовательность также можно изменить на обратную, чтобы добиться движения в противоположном направлении. Высокие нагрузки и/или сильное замедление/ускорение могут дестабилизировать эту последовательность, вызывая пропуск шага, в результате чего ротор подпрыгивает под неправильным углом, возможно, возвращаясь на один шаг назад вместо трех вперед.

Квадратура
[ редактировать ]Гораздо более стабильную систему можно получить, используя «квадратурную» последовательность, при которой в любой момент времени подается напряжение до двух катушек. Сначала на полюса статора A0 и A1 подается напряжение. Затем на полюса статора B0 и B1 подается напряжение, которое тянет ротор так, чтобы он оказался выровнен между A и B. После этого полюса статора A обесточиваются, и ротор продолжает выравниваться с B. Последовательность продолжается до BC, C и CA для завершения полного оборота. Эту последовательность можно изменить на обратную, чтобы добиться движения в противоположном направлении. Больше шагов между позициями с одинаковым намагничиванием, поэтому появление пропущенных шагов происходит при более высоких скоростях или нагрузках.
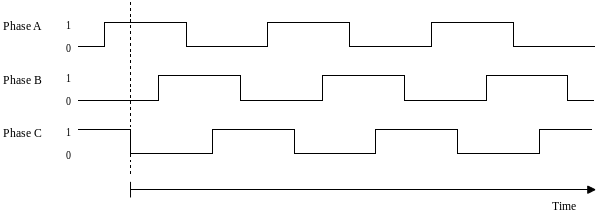
Помимо более стабильной работы, такой подход приводит к тому, что рабочий цикл каждой фазы составляет 1/2, а не 1/3, как в более простой последовательности.
Контроль
[ редактировать ]Система управления отвечает за подачу необходимых последовательных импульсов в силовую схему. Это можно сделать с помощью электромеханических средств, таких как коммутаторы или аналоговые или цифровые схемы синхронизации.
Многие контроллеры включают в себя программируемые логические контроллеры (ПЛК), а не электромеханические компоненты. Микроконтроллер может обеспечить точное время активации фазы. Он также обеспечивает функцию плавного запуска в программной форме, чтобы уменьшить количество необходимого оборудования. Петля обратной связи расширяет возможности системы управления. [1]
Силовая схема
[ редактировать ]
Наиболее распространенным подходом к питанию SRM является использование асимметричного мостового преобразователя. Частота коммутации может быть в 10 раз ниже, чем у двигателей переменного тока. [3]
Фазы в асимметричном мостовом преобразователе соответствуют фазам двигателя. Если оба силовых выключателя на каждой стороне фазы включены, то активируется соответствующая фаза. Как только ток превысит установленное значение, переключатель выключится. Энергия, накопленная теперь внутри обмотки, поддерживает ток в том же направлении, так называемая обратная ЭДС (BEMF). Этот BEMF возвращается через диоды в конденсатор для повторного использования, тем самым повышая эффективность. [10]

Эту базовую схему можно изменить так, чтобы требовалось меньше компонентов, хотя схема выполняет то же действие. Эта эффективная схема известна как конфигурация переключателя и диода (n+1).
Конденсатор . в любой конфигурации используется для хранения BEMF для повторного использования и для подавления электрических и акустических шумов путем ограничения колебаний напряжения питания
Если фаза отключена, двигатель SR может продолжать работать с меньшим крутящим моментом, в отличие от асинхронного двигателя переменного тока, который выключается. [5] [11]
Приложения
[ редактировать ]SRM используются в некоторых приборах, [12] в линейной форме для преобразования энергии волн , [13] поезда на магнитной подушке, [14] или промышленные швейные машины. [15]
Такую же электромеханическую конструкцию можно использовать и в генераторе. Нагрузка подключается к катушкам последовательно, чтобы синхронизировать протекание тока с вращением. Такие генераторы могут работать на гораздо более высоких скоростях, чем обычные типы, поскольку якорь может быть изготовлен как цельный кусок намагничивающегося материала в виде цилиндра с прорезями. [16] В этом случае аббревиатура SRM расширяется и означает «Машина с переключаемым сопротивлением» (вместе с SRG, «Генератор с переключаемым сопротивлением»). Топология, состоящая из двигателя и генератора, полезна для запуска первичного двигателя, поскольку позволяет сэкономить специальный стартер.
Ссылки
[ редактировать ]- ^ Jump up to: а б с Бартос, Франк (1 февраля 2003 г.). «Весна для реактивных двигателей?» . Техника управления . Архивировано из оригинала 19 мая 2020 года.
Цифровые сигнальные процессоры и специальные алгоритмы в управлении SR жизненно важны для точного определения времени импульсов тока, подаваемых на обмотки двигателя, относительно положения ротора и статора. Технология SR не испытала реальных прорывов. снижение интереса к технологии СИ
- ^ Станкович, AM; Тадмор, Г.; Чорич, Чорич (6–10 октября 1996 г.). Управление низкими пульсациями крутящего момента вентильных реактивных двигателей с питанием по току . МСФО '96. Протокол конференции тридцать первого ежегодного собрания IAS по отраслевым приложениям IEEE 1996 года. Сан-Диего, Калифорния. S2CID 61325620 . Проверено 3 июня 2024 г. [ мертвая ссылка ]
- ^ Jump up to: а б Бартос, Франк (1 марта 2010 г.). «Возрождение двигателей и приводов SR?» . Техника управления . Архивировано из оригинала 19 мая 2020 года.
Приводы SR работают с частотой переключения, как правило, в 10 раз меньшей, чем у сопоставимых приводов переменного тока. Некоторые другие источники, похоже, относят оба двигателя к одной категории. Emotron согласен с тем, что современный двигатель SR не является шаговым двигателем, поскольку ток постоянно контролируется и контролируется относительно углового положения ротора.
- ^ «Заряженные электромобили | Более пристальный взгляд на вентильные реактивные двигатели» . chargeevs.com . 25 января 2013 года . Проверено 25 июля 2020 г.
- ^ Jump up to: а б Бартос, Франк (10 марта 2010 г.). «Анатомия двигателя SR: см. Внутреннюю часть вентильных реактивных двигателей» . Техника управления . Архивировано из оригинала 27 октября 2018 года.
- ^ «Переключаемые реактивные двигатели с регулируемой скоростью», П. Дж. Лоуренсон, Дж. М. Стивенсон, П. Т. Бленкинсоп, Дж. Корда и Н. Н. Фултон, IEE Proceedings B - Электроэнергетические приложения, том 127, выпуск 4, 1980. стр. 253-265.
- ^ «Обладатели медали Эдисона IEEE» . ИИЭЭ . Архивировано из оригинала 19 мая 2020 года.
- ^ Бартос, Франк (1 ноября 1999 г.). « Вперед в прошлое с технологией SR» . Техника управления . Архивировано из оригинала 19 мая 2020 года.
- ^ Бартос, Франк (30 мая 2003 г.). «Двигатели с переключаемым сопротивлением и средства управления предлагают альтернативное решение» . Техника управления . Архивировано из оригинала 19 мая 2020 года.
Из-за относительно небольших объемов производства производственные затраты на технологию SR, как правило, выше.
- ^ «Силовые полупроводниковые коммутационные схемы для SRM (контроллеров мощности)» .
При необходимости отключения фазной обмотки от питания (этот момент также зависит от положения вала) устройства Т1 и Т2 отключаются. Запасенная энергия в фазной обмотке А стремится поддерживать ток в одном и том же направлении. . Этот ток проходит от обмотки через D1 и D2 к источнику питания. Таким образом, накопленная энергия возвращается в сеть.
- ^ «Сравнительный анализ отказоустойчивых вентильно-реактивных машин | Отказоустойчивость | Проектирование надежности» . Скрибд .
- ^ Буш, Стив (2009). «Бесщеточная технология постоянного тока Dyson пылесосит со скоростью 104 000 об/мин» . Еженедельный журнал электроники. Архивировано из оригинала 11 апреля 2012 года.
{{cite web}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ «Wedge Global | Лидер в области волновой энергетики» . Проверено 12 июня 2023 г.
- ^ «USEP участвует в проекте SCALE по разработке системы ускорения для сверхбыстрых перевозок Hyperloop» (на испанском языке). 20 февраля 2023 года. Архивировано из оригинала 13 июня 2023 года . Проверено 29 июля 2023 г.
- ^ Лэйтуэйт, Эрик Р. (1987), Лэйтуэйт, Эрик Р. (редактор), «Вклад текстильщиков» , « История линейных электродвигателей » , Лондон: Macmillan Education UK, стр. 52–83, doi : 10.1007. /978-1-349-08296-4_3 , ISBN 978-1-349-08296-4 , получено 12 июня 2023 г.
- ^ «Включаемые реактивные генераторы и управление ими» . Архивировано из оригинала 29 ноября 2014 года . Проверено 18 ноября 2016 г.
{{cite web}}: CS1 maint: bot: исходный статус URL неизвестен ( ссылка )
Внешние ссылки
[ редактировать ]- Приводы с переключаемым реактивным двигателем
- Моделирование и управление в реальном времени приводами с реактивными двигателями для высокоскоростной работы с пониженной пульсацией крутящего момента
- Торри - Реактивные генераторы и их управление DOI: 10.1109/41.982243
- Асади - Разработка и применение усовершенствованного привода вентильно-индукторного генератора.
- Архив базы данных SR
- Адам Бирнат: Электрические машины в энергетике и автоматике (Варшавский политехнический институт). Архивировано 13 июня 2021 года в Wayback Machine.
- Основные понятия синхронного реактивного двигателя