Асинхронный двигатель


Асинхронный двигатель или асинхронный двигатель — это электродвигатель переменного тока , в котором электрический ток в роторе , создающий крутящий момент, получается за счет электромагнитной индукции из магнитного поля статора обмотки . [1] Поэтому асинхронный двигатель не нуждается в электрическом соединении с ротором. [а] Ротор асинхронного двигателя может быть как с обмоткой, так и с короткозамкнутым ротором.
Трехфазные асинхронные двигатели с короткозамкнутым ротором широко используются в качестве промышленных приводов, поскольку они самозапускаются, надежны и экономичны. Однофазные асинхронные двигатели широко используются для небольших нагрузок, таких как вывоз мусора и стационарные электроинструменты. Хотя одно- и трехфазные асинхронные двигатели традиционно используются для работы с постоянной скоростью, они все чаще устанавливаются в приложениях с регулируемой скоростью с использованием приводов переменной частоты (ЧРП). VFD предлагает возможности экономии энергии для асинхронных двигателей в таких устройствах, как вентиляторы, насосы и компрессоры с переменной нагрузкой.
История [ править ]


В 1824 году французский физик Франсуа Араго сформулировал существование вращающихся магнитных полей , названных вращением Араго . Включая и выключая выключатели вручную, Уолтер Бейли продемонстрировал это в 1879 году, по сути, создав первый примитивный асинхронный двигатель. [2] [3] [4] [5] [6] [7] [8]
Первый бесколлекторный однофазный асинхронный двигатель переменного тока был изобретен венгерским инженером Отто Блати ; он использовал однофазный двигатель, чтобы привести в движение свое изобретение — счетчик электроэнергии . [9] [10]
Первые многофазные асинхронные двигатели переменного тока без коллектора были независимо изобретены Галилео Феррарисом и Николой Теслой , рабочая модель двигателя была продемонстрирована первым в 1885 году, а вторым - в 1887 году. Тесла подал заявку на патенты США в октябре и ноябре 1887 года и был предоставил некоторые из этих патентов в мае 1888 года. В апреле 1888 года Королевская академия наук Турина опубликовала исследование Феррариса о его многофазном двигателе переменного тока, в котором подробно описаны основы работы двигателя. [5] [11] технический документ « Новая система для двигателей и трансформаторов переменного тока» . В мае 1888 года Тесла представил Американскому институту инженеров-электриков (AIEE) [12] [13] [14] [15] [16] описывающее три типа четырехполюсных двигателей статора: один имеет четырехполюсный ротор, образующий несамозапускающийся реактивный двигатель , другой с фазным ротором, образующий самозапускающийся асинхронный двигатель, и третий настоящий синхронный двигатель с отдельно подача возбужденного постоянного тока на обмотку ротора.
Джордж Вестингауз , который в то время разрабатывал систему питания переменного тока , лицензировал патенты Теслы в 1888 году и приобрел в США опцион на патент на концепцию асинхронного двигателя Феррари. [17] Тесла также работал в течение одного года в качестве консультанта. Сотруднику Westinghouse К. Ф. Скотту было поручено помогать Тесле, а затем он взял на себя разработку асинхронного двигателя в Westinghouse. [12] [18] [19] [20] Настойчиво продвигая трехфазное развитие, Михаил Доливо-Добровольский изобрел асинхронный двигатель с короткозамкнутым ротором в 1889 году и трехлинейный трансформатор в 1890 году. [21] [22] Более того, он утверждал, что двигатель Теслы непрактичен из-за двухфазных пульсаций, что побудило его продолжать работу с трехфазным двигателем. [23] Хотя компания Westinghouse создала свой первый практический асинхронный двигатель в 1892 году и разработала линейку многофазных частотой 60 Гц асинхронных двигателей с в 1893 году, эти первые двигатели Westinghouse были двухфазными двигателями с фазным ротором, пока Б. Г. Ламме не разработал ротор с вращающейся стержневой обмоткой. [12]
Компания General Electric (GE) начала разработку трехфазных асинхронных двигателей в 1891 году. [12] К 1896 году General Electric и Westinghouse подписали соглашение о взаимном лицензировании конструкции ротора со стержневой обмоткой, позже названного ротором с короткозамкнутым ротором. [12] Артур Э. Кеннелли был первым, кто полностью раскрыл значение комплексных чисел (используя j для обозначения квадратного корня из минус одного) для обозначения оператора поворота на 90 градусов при анализе проблем переменного тока. [24] из GE Чарльз Протеус Штайнмец усовершенствовал применение комплексных величин переменного тока и разработал аналитическую модель, названную эквивалентной схемой Штайнмеца асинхронного двигателя . [12] [25] [26] [27]
Усовершенствования асинхронного двигателя, вытекающие из этих изобретений и инноваций, были таковы, что современный асинхронный двигатель мощностью 100 лошадиных сил имеет те же установочные размеры, что и двигатель мощностью 7,5 лошадиных сил в 1897 году. [12]
Принцип [ править ]
3-фазный двигатель [ править ]


Как в асинхронных, так и в синхронных двигателях двигателя, мощность переменного тока, подаваемая на статор создает магнитное поле , которое вращается синхронно с колебаниями переменного тока. В то время как ротор синхронного двигателя вращается с той же скоростью, что и поле статора, ротор асинхронного двигателя вращается с несколько меньшей скоростью, чем поле статора. Таким образом, магнитное поле статора асинхронного двигателя меняется или вращается относительно ротора. Это индуцирует противоположный ток в роторе, то есть во вторичной обмотке двигателя. [28] Вращающийся магнитный поток индуцирует токи в обмотках ротора. [29] аналогично токам, наводимым во . вторичной обмотке трансформатора
Индуцированные токи в обмотках ротора, в свою очередь, создают магнитные поля в роторе, которые противодействуют полю статора. Направление магнитного поля ротора противодействует изменению тока через обмотки ротора в соответствии с законом Ленца . Причиной возникновения наведенного тока в обмотках ротора является вращающееся магнитное поле статора, поэтому, чтобы противодействовать изменению токов в обмотках ротора, ротор вращается в направлении магнитного поля статора. Ротор ускоряется до тех пор, пока величина индуцированного тока и крутящего момента ротора не уравновесит нагрузку на ротор. Поскольку вращение с синхронной скоростью не вызывает ток ротора, асинхронный двигатель всегда работает немного медленнее синхронной скорости. Разница, или «скольжение», между фактической и синхронной скоростью варьируется примерно от 0,5% до 5,0% для стандартных асинхронных двигателей с кривой крутящего момента конструкции B. [30] Основная особенность асинхронного двигателя заключается в том, что крутящий момент создается исключительно за счет индукции, а не отдельного возбуждения ротора, как в синхронных машинах или машинах постоянного тока, или самонамагничивания, как в двигателях с постоянными магнитами . [28]
Чтобы индуцировались токи ротора, скорость физического ротора должна быть ниже, чем скорость вращающегося магнитного поля статора ( ); в противном случае магнитное поле не перемещалось бы относительно проводников ротора и не возникало бы никаких токов. Когда скорость ротора падает ниже синхронной скорости, скорость вращения магнитного поля в роторе увеличивается, вызывая больший ток в обмотках и создавая больший крутящий момент. Отношение между скоростью вращения магнитного поля, индуцированного в роторе, и скоростью вращения вращающегося поля статора называется «скольжением». Под нагрузкой скорость падает, а скольжение увеличивается настолько, что создается достаточный крутящий момент для поворота груза. По этой причине асинхронные двигатели иногда называют «асинхронными двигателями». [31]

Асинхронный двигатель можно использовать в качестве асинхронного генератора или его можно развернуть, чтобы сформировать линейный асинхронный двигатель , который может непосредственно генерировать линейное движение. Генераторный режим для асинхронных двигателей осложнен необходимостью возбуждения ротора, которое начинается только с остаточного намагничивания. В некоторых случаях остаточной намагниченности достаточно для самовозбуждения двигателя под нагрузкой. Поэтому необходимо либо отключить двигатель и моментально подключить его к сети под напряжением, либо добавить конденсаторы, изначально заряженные остаточным магнетизмом и обеспечивающие необходимую реактивную мощность во время работы. Аналогично работает асинхронный двигатель параллельно с синхронным двигателем, служащим компенсатором коэффициента мощности. Особенностью режима генератора параллельно сети является то, что частота вращения ротора выше, чем в режиме движения. Затем активная энергия передается в сеть. [2] Другим недостатком асинхронного двигателя-генератора является то, что он потребляет значительный ток намагничивания I 0 = (20–35)%.
Синхронная скорость [ править ]
Синхронная скорость двигателя переменного тока, , — скорость вращения магнитного поля статора,

- ,

где частота источника питания, - число магнитных полюсов, а - синхронная скорость машины. Для в герцах и синхронная скорость в об/мин , формула принимает вид:



Например, для четырехполюсного трехфазного двигателя: = 4 и = 1500 об/мин (для = 50 Гц) и 1800 об/мин (для = 60 Гц) синхронная скорость.

Число магнитных полюсов, , — количество северных и южных полюсов на фазу. Например; Однофазный двигатель с 3 северными и 3 южными полюсами, по 6 полюсов на фазу, является 6-полюсным двигателем. Трехфазный двигатель с 18 северными и 18 южными полюсами, по 6 полюсов на фазу, также является 6-полюсным двигателем. Этот стандартный метод подсчета полюсов обеспечивает одинаковую синхронную скорость для заданной частоты независимо от полярности.
Слип [ править ]

Соскальзывать, , определяется как разница между синхронной скоростью и рабочей скоростью при той же частоте, выраженная в об/мин или в процентах или отношении к синхронной скорости. Таким образом


где — электрическая скорость статора, — механическая скорость ротора. [34] [35] Скольжение, которое изменяется от нуля при синхронной скорости до 1 при остановке ротора, определяет крутящий момент двигателя. Поскольку короткозамкнутые обмотки ротора имеют небольшое сопротивление, даже небольшое скольжение вызывает в роторе большой ток и создает значительный крутящий момент. [36] При полной номинальной нагрузке скольжение варьируется от более 5 % для двигателей малого или специального назначения до менее 1 % для двигателей большой мощности. [37] Эти изменения скорости могут вызвать проблемы с распределением нагрузки при механическом соединении двигателей разной мощности. [37] Доступны различные методы уменьшения скольжения, и частотно-регулируемые приводы часто являются лучшим решением. [37]

Крутящий момент [ править ]
Стандартный крутящий момент [ править ]


Типичное соотношение скорости и крутящего момента стандартного многофазного асинхронного двигателя NEMA Design B показано на кривой справа. Двигатели конструкции B, подходящие для большинства низкопроизводительных нагрузок, таких как центробежные насосы и вентиляторы, ограничены следующими типичными диапазонами крутящих моментов: [30] [б]
- Крутящий момент (максимальный), 175–300 % номинального момента.
- Крутящий момент заторможенного ротора (крутящий момент при скольжении 100 %), 75–275 % номинального крутящего момента.
- Тяговый момент: 65–190 % от номинального.
В нормальном диапазоне нагрузки двигателя крутящий момент примерно линейен или пропорционален скольжению, поскольку значение сопротивления ротора, деленное на скольжение, , линейно доминирует над крутящим моментом. [38] По мере увеличения нагрузки выше номинальной, коэффициенты реактивного сопротивления рассеяния статора и ротора постепенно становятся более значимыми по отношению к так, что крутящий момент постепенно приближается к моменту пробоя. Когда момент нагрузки превышает момент пробоя, двигатель глохнет.

Начало [ править ]
Существует три основных типа небольших асинхронных двигателей: однофазные с расщепленной фазой, однофазные с экранированными полюсами и многофазные.
В двухполюсных однофазных двигателях крутящий момент достигает нуля при 100% скольжении (нулевой скорости), поэтому требуются изменения в статоре, например, установка заштрихованных полюсов для обеспечения пускового крутящего момента . Однофазный асинхронный двигатель требует отдельной пусковой схемы для создания вращающегося поля двигателя. Нормальные рабочие обмотки такого однофазного двигателя могут заставить ротор вращаться в любом направлении, поэтому пусковая цепь определяет рабочее направление.

В некоторых однофазных двигателях меньшего размера пуск осуществляется с помощью медного провода, оборачивающего часть полюса; такой столб называется заштрихованным столбом. Наведенный в этом витке ток отстает от тока питания, создавая задержанное магнитное поле вокруг заштрихованной части полюсной грани. Это передает достаточную энергию вращательного поля для запуска двигателя. Эти двигатели обычно используются в таких устройствах, как настольные вентиляторы и проигрыватели пластинок, поскольку требуемый пусковой момент низок, а низкий КПД терпим по сравнению со снижением стоимости двигателя и метода запуска по сравнению с другими конструкциями двигателей переменного тока.
Однофазные двигатели большего размера представляют собой двигатели с расщепленной фазой и имеют вторую обмотку статора, питаемую противофазным током; такие токи могут быть созданы путем питания обмотки через конденсатор или получения ею различных значений индуктивности и сопротивления от основной обмотки. В конструкциях с конденсаторным пуском вторая обмотка отключается, как только двигатель набирает скорость, обычно либо с помощью центробежного переключателя, воздействующего на грузы на валу двигателя, либо с помощью термистора , который нагревается и увеличивает свое сопротивление, уменьшая ток через вторую обмотку. до незначительного уровня. Конструкции с конденсаторным питанием удерживают вторую обмотку включенной во время работы, улучшая крутящий момент. В конструкции запуска с сопротивлением используется стартер, включенный последовательно с пусковой обмоткой, что создает реактивное сопротивление.
Самозапускающиеся многофазные асинхронные двигатели создают крутящий момент даже в состоянии покоя. Доступные методы запуска асинхронных двигателей с короткозамкнутым ротором включают прямой пуск, пуск с реактора пониженного напряжения или автотрансформатора, пуск со звездой-треугольником или, все чаще, новые полупроводниковые мягкие сборки и, конечно же, частотно-регулируемые приводы (ЧРП). ). [39]
Многофазные двигатели имеют стержни ротора, форма которых обеспечивает различные скоростно-моментные характеристики. Распределение тока внутри стержней ротора меняется в зависимости от частоты наведенного тока. В состоянии покоя ток ротора имеет ту же частоту, что и ток статора, и имеет тенденцию распространяться по самым внешним частям стержней ротора (за счет скин-эффекта ). Различные формы стержней могут обеспечить различные характеристики скорости и крутящего момента, а также некоторый контроль над пусковым током при запуске.
Хотя многофазные двигатели по своей сути являются самозапускающимися, их расчетные пределы пускового и тягового крутящего момента должны быть достаточно высокими, чтобы преодолевать условия реальной нагрузки.
В двигателях с фазным ротором подключение цепи ротора через контактные кольца к внешним сопротивлениям позволяет изменять скоростно-моментные характеристики в целях регулирования ускорения и регулирования скорости.
Контроль скорости [ править ]
Сопротивление [ править ]

До разработки полупроводниковой силовой электроники было трудно изменять частоту, и асинхронные двигатели с короткозамкнутым ротором в основном использовались в приложениях с фиксированной скоростью. В таких приложениях, как электрические мостовые краны, используются приводы постоянного тока или двигатели с фазным ротором (WRIM) с контактными кольцами для подключения цепи ротора к переменному внешнему сопротивлению, что позволяет регулировать скорость в значительном диапазоне. Однако потери в резисторах, связанные с работой WRIM на низкой скорости, являются основным экономическим недостатком, особенно для постоянных нагрузок. [40] Приводы двигателей с большими контактными кольцами, называемые системами рекуперации энергии скольжения, некоторые из которых все еще используются, восстанавливают энергию из цепи ротора, исправляют ее и возвращают в энергосистему с помощью частотно-регулируемого привода.
Каскад [ править ]
Скорость пары двигателей с контактными кольцами можно регулировать путем каскадного соединения или конкатенации. Ротор одного двигателя соединен со статором другого. [ нужна ссылка ] Если два двигателя также механически связаны, они будут работать на половинной скорости. Эта система когда-то широко использовалась в железнодорожных локомотивах трехфазного переменного тока, таких как FS Class E.333 . Однако на рубеже этого столетия такие каскадные электромеханические системы стали гораздо более эффективными и экономичными с использованием решений на основе силовых полупроводниковых элементов. [41]
Частотно-регулируемый привод [ править ]
Во многих промышленных приложениях с регулируемой скоростью приводы постоянного тока и WRIM заменяются асинхронными двигателями с ЧРП. Наиболее распространенным и эффективным способом управления скоростью асинхронного двигателя многих нагрузок является использование частотно-регулируемых приводов. Барьеры для внедрения ЧРП из-за соображений стоимости и надежности были значительно уменьшены за последние три десятилетия, так что, по оценкам, технология привода используется в 30–40% всех вновь устанавливаемых двигателей. [42]
Преобразователи частоты реализуют скалярное или векторное управление асинхронным двигателем.
При скалярном управлении контролируются только величина и частота напряжения питания без фазового регулирования (отсутствует обратная связь по положению ротора). Скалярное управление подходит для приложений, где нагрузка постоянна.
Векторное управление позволяет независимо управлять скоростью и крутящим моментом двигателя, позволяя поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. Но векторное управление обходится дороже из-за стоимости датчика (не всегда) и необходимости более мощного контроллера. [43]
Строительство [ править ]

Статор асинхронного двигателя состоит из полюсов, по которым течет питающий ток, индуцирующий магнитное поле, пронизывающее ротор. Для оптимизации распределения магнитного поля обмотки распределены по пазам вокруг статора, при этом магнитное поле имеет одинаковое количество северных и южных полюсов. Асинхронные двигатели чаще всего работают от однофазной или трехфазной сети, но существуют и двухфазные двигатели; теоретически асинхронные двигатели могут иметь любое количество фаз. Многие однофазные двигатели, имеющие две обмотки, можно рассматривать как двухфазные двигатели, поскольку конденсатор используется для генерации второй фазы питания под углом 90° от однофазного источника питания и подачи ее на вторую обмотку двигателя. Однофазным двигателям требуется какой-то механизм для создания вращающегося поля при запуске. Асинхронные двигатели, использующие обмотку ротора с короткозамкнутым ротором, могут иметь слегка перекошенные стержни ротора, чтобы сгладить крутящий момент при каждом обороте.
Стандартизированные размеры корпусов двигателей NEMA и IEC во всей отрасли приводят к взаимозаменяемым размерам вала, крепления на лапах, общих аспектов, а также определенных аспектов фланцев двигателя. Поскольку открытая конструкция двигателя с защитой от капель (ODP) обеспечивает свободный обмен воздуха снаружи во внутренние обмотки статора, этот тип двигателя имеет тенденцию быть немного более эффективным, поскольку обмотки более холодные. При данной номинальной мощности более низкая скорость требует рамы большего размера. [44]
Реверс вращения [ править ]
Способ изменения направления вращения асинхронного двигателя зависит от того, трехфазная это машина или однофазная. Трехфазный двигатель можно реверсировать, поменяв местами любые две его фазы. Двигатели, которым необходимо регулярно менять направление вращения (например, подъемники), будут иметь в контроллере дополнительные переключающие контакты для обратного вращения при необходимости. почти Частотно-регулируемый привод всегда допускает реверс путем электронного изменения последовательности фаз напряжения, подаваемого на двигатель.
В однофазном двигателе с расщепленной фазой реверс достигается путем изменения местами соединений пусковой обмотки. На некоторых двигателях соединения пусковой обмотки выведены, чтобы можно было выбрать направление вращения при установке. Если пусковая обмотка постоянно подключена к двигателю, менять направление вращения нецелесообразно. Однофазные двигатели с экранированными полюсами имеют фиксированное вращение, если не предусмотрен второй комплект экранирующих обмоток.
Коэффициент мощности [ править ]
Коэффициент мощности асинхронных двигателей варьируется в зависимости от нагрузки, обычно от примерно 0,85 или 0,90 при полной нагрузке до примерно 0,20 при холостом ходу. [39] из-за утечки статора и ротора и реактивных сопротивлений намагничивания. [45] Коэффициент мощности можно повысить, подключив конденсаторы либо к отдельному двигателю, либо, предпочтительно, к общей шине, охватывающей несколько двигателей. По экономическим и другим соображениям коэффициент мощности редко корректируется до единицы. [46] Применение силовых конденсаторов с гармоническими токами требует анализа энергосистемы, чтобы избежать гармонического резонанса между конденсаторами и реактивными сопротивлениями трансформатора и цепи. [47] Коррекция коэффициента мощности общей шины рекомендуется для минимизации резонансного риска и упрощения анализа энергосистемы. [47]
Эффективность [ править ]
КПД двигателя при полной нагрузке колеблется в пределах 85–97% при следующих потерях: [48]
- Трение и парусность , 5–15%
- Потери железа или сердечника , 15–25%
- Потери статора, 25–40%
- Потери ротора, 15–25%
- Потери на случайные нагрузки 10–20%.
Для электродвигателя КПД обозначается греческой буквой Эта. [49] определяется как частное выходной механической мощности и входной электрической мощности, [50] рассчитывается по этой формуле:

Регулирующие органы во многих странах приняли законы, поощряющие производство и использование электродвигателей с более высоким КПД. Некоторые законы предписывают использование в будущем асинхронных двигателей с повышенным КПД в определенном оборудовании. Дополнительную информацию см. в разделе: Эффективность премиум-класса .
Штейнмеца схема Эквивалентная
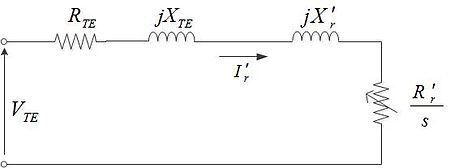
Многие полезные зависимости двигателя между временем, током, напряжением, скоростью, коэффициентом мощности и крутящим моментом можно получить из анализа эквивалентной схемы Штейнмеца (также называемой Т-эквивалентной схемой или рекомендованной IEEE эквивалентной схемой), математической модели, используемой для описания того, как Входная электрическая мощность асинхронного двигателя преобразуется в полезную выходную механическую энергию. Эквивалентная схема представляет собой однофазное представление многофазного асинхронного двигателя, которое действует в установившихся условиях сбалансированной нагрузки.
Эквивалентная схема Штейнмеца выражается просто через следующие компоненты:
- статора Сопротивление и реактивное сопротивление утечки ( , ).
- Сопротивление ротора , реактивное сопротивление утечки и скольжение ( , или , , и ).
- намагничивания Реактивное сопротивление ( ).







Перефразируя слова Алджера в Ноултоне, асинхронный двигатель — это просто электрический трансформатор, магнитная цепь которого разделена воздушным зазором между обмоткой статора и обмоткой движущегося ротора. [28] Соответственно, эквивалентная схема может быть показана либо с компонентами эквивалентной схемы соответствующих обмоток, разделенными идеальным трансформатором, либо с компонентами ротора, относящимися к стороне статора, как показано в следующей схеме и связанных с ней уравнениях и таблицах определения параметров. [39] [46] [51] [52] [53] [54]

К схеме применимы следующие эмпирические приближения: [54] [55] [56]
- Максимальный ток возникает в условиях тока запертого ротора (LRC) и несколько меньше , при этом LRC обычно превышает номинальный ток в 6–7 раз для стандартных двигателей конструкции B. [30]
- Крутящий момент пробоя происходит, когда и такой, что и, таким образом, при постоянном входном напряжении максимальный номинальный крутящий момент асинхронного двигателя с малым скольжением составляет примерно половину его номинального процентного LRC.
- Относительное реактивное сопротивление рассеяния статора к ротору стандартных асинхронных двигателей с короткозамкнутым ротором конструкции B составляет [57]
- .
- Если пренебречь сопротивлением статора, кривая крутящего момента асинхронного двигателя сводится к уравнению Клосса. [58]
- , где скользит в .








| Определения параметров схемы |
|---|







































| Основные электрические уравнения |
|---|




| Уравнения мощности |
|---|





| Уравнения крутящего момента |
|---|


















Линейный асинхронный двигатель [ править ]
Линейные асинхронные двигатели, работающие по тем же общим принципам, что и роторные асинхронные двигатели (часто трехфазные), предназначены для обеспечения прямолинейного движения. Область применения включает магнитную левитацию , линейное движение, линейные приводы и перекачку жидкого металла . [59]
См. также [ править ]
- двигатель переменного тока
- Круговая диаграмма
- Индукционный генератор
- Премиальная эффективность
- Переменный расход хладагента
Примечания [ править ]
- ^ То есть отсутствует механическая коммутация , раздельное возбуждение или самовозбуждение для всей или части энергии, передаваемой от статора к ротору, как это происходит в универсальных двигателях , двигателях постоянного тока и синхронных двигателях.
- ^ NEMA MG-1 определяет а) крутящий момент как максимальный крутящий момент, развиваемый двигателем при номинальном напряжении, приложенном при номинальной частоте, без резкого падения скорости, б) крутящий момент при заторможенном роторе как минимальный крутящий момент, развиваемый двигателем в состоянии покоя с номинальной частотой. напряжение, приложенное с номинальной частотой, и c) тяговый момент – это минимальный крутящий момент, развиваемый двигателем в период ускорения от состояния покоя до скорости, при которой возникает момент пробоя.
Ссылки [ править ]
- ^ IEC 60050 (Дата публикации: 1990-10). Раздел 411-31: Машины ротационного типа – Общие сведения, исх. IEV. 411-31-10: « Асинхронная машина – асинхронная машина, у которой под напряжением находится только одна обмотка».
- ↑ Перейти обратно: Перейти обратно: а б Бэббидж, К.; Гершель, JFW (январь 1825 г.). «Отчет о повторении экспериментов М. Араго по магнетизму, проявляемому различными веществами во время акта вращения» . Философские труды Королевского общества . 115 : 467–496. Бибкод : 1825RSPT..115..467B . дои : 10.1098/rstl.1825.0023 . Проверено 2 декабря 2012 г.
- ^ Томпсон , Сильванус Филлипс (1895). Многофазные электрические токи и двигатели переменного тока (1-е изд.). Лондон: E. & FN Spon. п. 261 . Проверено 2 декабря 2012 г.
- ^ Бейли, Уолтер (28 июня 1879 г.). «Способ создания вращения Араго» . Философский журнал . 3 (1). Тейлор и Фрэнсис: 115–120. Бибкод : 1879PPSL....3..115B . дои : 10.1088/1478-7814/3/1/318 .
- ↑ Перейти обратно: Перейти обратно: а б Вучкович, Владан (ноябрь 2006 г.). «Интерпретация открытия» (PDF) . Сербский журнал инженеров-электриков . 3 (2) . Проверено 10 февраля 2013 г.
- ^ Инженер-электрик, Том 5. (февраль 1890 г.)
- ^ Электрик, Том 50. 1923 г.
- ^ Официальный бюллетень Патентного ведомства США: Том 50. (1890 г.)
- ^ Евгений Кац. «Блати» . People.clarkson.edu. Архивировано из оригинала 25 июня 2008 года . Проверено 4 августа 2009 г.
- ^ Рикс, GWD (март 1896 г.). «Счетчики электроэнергии» . Журнал Института инженеров-электриков . 25 (120): 57–77. дои : 10.1049/jiee-1.1896.0005 .
- ^ Феррарис, Г. (1888). «Труды Королевской академии наук Турина». Труды Королевской академии наук Турина . XXIII : 360–375.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г Алжир, Польша; Арнольд, Р.Э. (1976). «История асинхронных двигателей в Америке». Труды IEEE . 64 (9): 1380–1383. дои : 10.1109/PROC.1976.10329 . S2CID 42191157 .
- ^ Фрелих, Фриц Э.; Кент, Аллен , ред. (1992). Энциклопедия телекоммуникаций Фрелиха/Кента: Том 17 – Телевизионные технологии для подключения антенн (первое издание). Нью-Йорк: Marcel Dekker, Inc., с. 36. ISBN 978-0-8247-2902-8 .
- ^ Инженер-электрик (21 сентября 1888 г.). . . . о новом применении переменного тока для создания вращательного движения было известно почти одновременно двум экспериментаторам, Николе Тесле и Галилео Феррарису, и эта тема привлекла всеобщее внимание тем фактом, что не было никакого коммутатора или какого-либо соединения с якорем. необходимый. . . . Том. II. Лондон: Charles & Co. 239.
- ^ Феррарис, Галилей (1885). «Электромагнитное вращение с переменным током». Электрик . 36 : 360–375.
- ^ Тесла, Никола; AIEE Транс. (1888). «Новая система для двигателей и трансформаторов переменного тока» . АИЭЭ . 5 : 308–324 . Проверено 17 декабря 2012 г.
- ^ Джоннес, Джилл (19 августа 2003 г.). Империи света: Эдисон, Тесла, Вестингауз и гонка за электрификацию мира . Издательская группа Random House. ISBN 9781588360007 – через Google Книги.
- ^ «Электрический мир» . МакГроу-Хилл. 18 мая 1921 г. - через Google Книги.
- ^ Клоостер, Джон В. (30 июля 2009 г.). Иконы изобретений Создатели современного мира от Гутенберга до Гейтса . Санта-Барбара: ABC-CLIO. п. 305. ИСБН 978-0-313-34744-3 . Проверено 10 сентября 2012 г.
- ^ Дэй, Лэнс (1996). Макнил, Ян (ред.). Биографический словарь истории техники . Лондон: Рутледж . п. 1204. ИСБН 978-0-203-02829-2 . Проверено 2 декабря 2012 г.
- ^ Хаббелл, М.В. (2011). Основы атомной энергетики. Вопросы и ответы . Авторхаус. п. 27. ISBN 978-1463424411 .
- ^ Комитет VDE по истории электротехники, немецкое отделение IEEE (январь 2012 г.). «Коллоквиум к 150-летию со дня рождения Михаэля фон Доливо-Добровольского» . Новости истории энергетических технологий . 13 . Архивировано из оригинала 25 февраля 2013 года . Проверено 10 февраля 2013 г.
- ^ Доливо-Добровольский, М. (1891). ЭТЗ . 12 : 149, 161.
{{cite journal}}: Отсутствует или пусто|title=( помощь ) - ^ Кеннелли, Артур Э. (январь 1893 г.). «Импеданс» . Труды Американского института инженеров-электриков . Х : 172–232. дои : 10.1109/T-AIEE.1893.4768008 . S2CID 264022523 .
- ^ Штайнмец, Чарльз Протей (1897). «Асинхронный двигатель переменного тока». AIEE Транс . XIV (1): 183–217. дои : 10.1109/T-AIEE.1897.5570186 . S2CID 51652760 .
- ^ Банихашеми, Абдолмаджид (1973). Определение потерь в асинхронных машинах из-за гармоник (PDF) . Фредериктон, Небраска: Университет Нью-Брансуика. стр. 1, 5–8. Архивировано из оригинала (PDF) 4 июля 2013 года.
- ^ Стейнмец, Чарльз Протеус; Берг, Эрнст Дж. (1897). Теория и расчет явлений переменного тока . Издательская компания МакГроу. ОЛ 7218906М .
- ↑ Перейти обратно: Перейти обратно: а б с Алджер, Филип Л.; и др. (3 сентября 2012 г.). « Подраздел «Асинхронные машины» раздела 7 – Генераторы и двигатели переменного тока». В Бити, Х. Уэйн; Финк, Дональд Г. (ред.). Стандартный справочник для инженеров-электриков, шестнадцатое издание (16-е изд.). МакГроу Хилл Профессионал. ISBN 978-0-07-176231-1 .
- ^ «АС Моторс» . HSC Online Нового Южного Уэльса – Университет Чарльза Стерта. Архивировано из оригинала 30 октября 2012 года . Проверено 2 декабря 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б с NEMA MG-1, 2007 г., сокращенный вариант (2008 г.). Информационное руководство по стандартам общего назначения для промышленных асинхронных двигателей переменного тока малого и среднего размера с короткозамкнутым ротором . Росслин, Вирджиния, США: NEMA. п. 29 (Таблица 11) . Проверено 2 декабря 2012 г.
{{cite book}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ «Асинхронные (асинхронные) двигатели» (PDF) . Факультет электротехники и вычислительной техники Университета штата Миссисипи, курс ECE 3183, «Электротехнические системы для специальностей, не относящихся к ECE». Архивировано из оригинала (PDF) 15 мая 2016 года . Проверено 2 декабря 2012 г.
- ^ «Асинхронные двигатели» . electricmotors.machinedesign.com . Penton Media, Inc. Архивировано из оригинала 16 ноября 2007 года . Проверено 12 апреля 2016 г.
- ^ «Формулы двигателя» . elec-toolbox.com. Архивировано из оригинала 8 мая 1999 года . Проверено 1 января 2013 г.
- ^ Шривастава, Авинаш; Кумар, Рави. «Характеристики скольжения крутящего момента асинхронного двигателя». Примечания к курсу . Инженерный колледж Малнад.
- ^ Публикация стандартов NEMA (2007 г.). Руководство по применению систем приводов с регулируемой скоростью переменного тока . Росслин, Вирджиния, США: NEMA. п. 6. Архивировано из оригинала 28 апреля 2008 года . Проверено 2 декабря 2012 г.
- ^ Герман, Стивен Л. (2011). Основы переменного тока (8-е изд.). США: Cengage Learning. стр. 529–536. ISBN 978-1-111-03913-4 .
- ↑ Перейти обратно: Перейти обратно: а б с Пелтола, Маури. «Пробуксовка асинхронного двигателя переменного тока» . Plantservices.com . Проверено 18 декабря 2012 г.
- ^ Келджик, Джеффри (2009). «Глава 12 – Трехфазный асинхронный двигатель с короткозамкнутым ротором». Электричество 4: Двигатели переменного и постоянного тока, управление и обслуживание (9-е изд.). Клифтон-Парк, Нью-Йорк: Дельмар, Cengage Learning. стр. 112–115. ISBN 978-1-4354-0031-3 .
- ↑ Перейти обратно: Перейти обратно: а б с Лян, Сяодун; Илочонву, Обинна (январь 2011 г.). «Запуск асинхронных двигателей в практическом промышленном применении». Транзакции IEEE для промышленных приложений . 47 (1): 271–280. дои : 10.1109/TIA.2010.2090848 . S2CID 18982431 .
- ^ Джамиль Асгар, MS (2003). «Регулирование скорости асинхронных двигателей с фазным ротором с помощью оптимального управления напряжением на основе регулятора переменного тока». Пятая Международная конференция по силовой электронике и приводным системам, 2003 г. PEDS 2003 . Том. 2. С. 1037–1040. дои : 10.1109/PEDS.2003.1283113 . ISBN 978-0-7803-7885-8 . S2CID 113603428 .
- ^ Гумеров Марина Борисовна; Бабикова Наталья Львовна, Марина Борисовна; Рустам Иванович Гареев, Марина Борисовна (22–25 октября 2019 г.). Каскадный синхронно-асинхронный двигатель . Труды ICOECS: Международная конференция по электротехническим комплексам и системам 2019. Пискатауэй, Нью-Джерси: Уфимский государственный авиационный технический университет, Уфа, Россия. п. 1. дои : 10.1109/ICOECS46375.2019.8949946 . ISBN 978-1-7281-1728-7 .
- ^ Ленденманн, Хайнц; Могадам, Реза Р.; Тами, Ари; Танд, Ларс-Эрик. «Вперед на автомобиле» (PDF) . Проверено 18 апреля 2012 г.
- ^ «Принцип работы трехфазного асинхронного двигателя» .
- ^ Группа АББ (Baldor Electric Company) (2016 г.). «РУКОВОДСТВО ПО СПЕЦИАЛЬНОСТИ» (PDF) . п. 6. Архивировано из оригинала (PDF) 23 ноября 2016 года . Проверено 4 октября 2016 г.
- ^ Финк, Д.Г.; Бити, HW (1978). Стандартный справочник для инженеров-электриков (11-е изд.). МакГроу-Хилл. стр. 20–28–20–29.
- ↑ Перейти обратно: Перейти обратно: а б Джордан, Ховард Э. (1994). Энергоэффективные электродвигатели и их применение (2-е изд.). Нью-Йорк: Пленум Пресс. ISBN 978-0-306-44698-6 .
- ↑ Перейти обратно: Перейти обратно: а б НЭМА МГ-1, стр. 19.
- ^ Министерство энергетики США (2008). «Повышение производительности двигателей и приводных систем: справочник для промышленности» (PDF) . п. 27 . Проверено 31 декабря 2012 г.
- ^ де Свардт, Хенк (февраль 2014 г.). «Можно ли отремонтировать высокоэффективный двигатель среднего напряжения?» . Международная конференция IEEE по промышленным технологиям (ICIT) , 2014 г. Пусан, Южная Корея: IEEE. стр. 169–174. дои : 10.1109/ICIT.2014.6894933 . ISBN 978-1-4799-3939-8 .
- ^ де Свардт, Хенк (февраль 2014 г.). «Мифы об эффективности электродвигателей: работа против отходов» . Международная конференция IEEE по промышленным технологиям (ICIT) , 2014 г. стр. 193–196. дои : 10.1109/ICIT.2014.6894937 . ISBN 978-1-4799-3939-8 .
- ^ Юбер, Чарльз I. (2002). Электрические машины: теория, работа, применение, регулировка и управление (2-е изд.). Река Аппер-Сэдл, Нью-Джерси: Прентис-Холл. стр. Глава 4. ISBN 978-0130612106 .
- ^ Бити, Х. Уэйн, изд. (2006). «Раздел 5 – Трехфазные асинхронные двигатели Хашема Ораи» (PDF) . Справочник по расчетам электроэнергии (3-е изд.). Нью-Йорк: МакГроу-Хилл. ISBN 0-07-136298-3 . Архивировано из оригинала (PDF) 13 августа 2012 года.
- ^ Найт, Энди. «Модель эквивалентной цепи индукционной машины» . Организатор: Университет Калгари . Проверено 2 февраля 2022 г.
- ↑ Перейти обратно: Перейти обратно: а б ИИЭР 112 (2004 г.). Стандартная процедура испытаний IEEE для многофазных асинхронных двигателей и генераторов . Нью-Йорк, штат Нью-Йорк: IEEE. ISBN 978-0-7381-3978-4 .
{{cite book}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ Алджер (1949), с. 711
- ↑ Перейти обратно: Перейти обратно: а б с д и Озюрт, Ч.Х. (2005). Оценка параметров и скорости асинхронных двигателей на основе данных и измерений производителей (PDF) . Ближневосточный технический университет. стр. 33–34.
- ^ Найт, Энди. «Определение параметров индукционной машины» . Организатор: Университет Калгари . Проверено 1 февраля 2022 г.
- ^ Хамейер, Кей (2001). «Электрическая машина I: основы, конструкция, функции, работа» (PDF) . RWTH Ахенский университет, Институт электрических машин. Архивировано из оригинала (PDF) 10 февраля 2013 года . Проверено 11 января 2013 г. страница=133
- ^ Бюллетень ученых-атомщиков . Образовательный фонд атомной науки. 6 июня 1973 года . Проверено 8 августа 2012 г.
Классические источники [ править ]
- Бейли, Бенджамин Франклин (1911). Асинхронный двигатель . МакГроу-Хилл.
индукционный двигатель.
- Беренд, Бернхард Артур (1901). Асинхронный двигатель: краткий трактат о его теории и конструкции с многочисленными экспериментальными данными и диаграммами . Издательская компания McGraw / Мир электротехники и инженер.
- Бой де ла Тур, Анри (1906). Асинхронный двигатель: его теория и конструкция, изложенные практическим методом расчета . Перевел Сиприена Одилон Майу. МакГроу Паб. Ко.
Внешние ссылки [ править ]
- Кто изобрел многофазный электродвигатель?
- Сильванус Филлипс Томпсон: Многофазные электрические токи и двигатели переменного тока.
- Темы об асинхронных двигателях с веб-сайта «Гиперфизика», организованного CR Nave, кафедрой физики и астрономии GSU.
- Документы Каурн
