Активная и пассивная трансформация

Геометрические преобразования можно разделить на два типа: активные преобразования или преобразования алиби , которые изменяют физическое положение набора точек относительно фиксированной системы отсчета или системы координат ( алиби означает «нахождение где-то в другом месте в одно и то же время»); и пассивные преобразования или преобразования псевдонимов , которые оставляют точки фиксированными, но меняют систему отсчета или систему координат, относительно которой они описаны ( псевдоним означает «переходить под другим именем»). [1] [2] Под трансформацией могут иметь в виду и то , математики обычно подразумевают активные трансформации, тогда как физики и инженеры и другое. [ нужна ссылка ]
Например, активные преобразования полезны для описания последовательных положений твердого тела . С другой стороны, пассивные преобразования могут быть полезны при анализе движений человека, чтобы наблюдать движение большеберцовой кости относительно бедренной кости , то есть ее движение относительно ( локальной ) системы координат, которая движется вместе с бедренной костью, а не (локальной) системой координат, которая движется вместе с бедренной костью. глобальная ) система координат, привязанная к полу. [2]
В трехмерном евклидовом пространстве любое правильное жесткое преобразование , активное или пассивное, может быть представлено как винтовое смещение , сочетание перемещения вдоль оси и вращения вокруг этой оси.
Термины «активное преобразование» и «пассивное преобразование» были впервые введены в 1957 году Валентином Баргманном для описания преобразований Лоренца в специальной теории относительности . [3]
Пример [ править ]
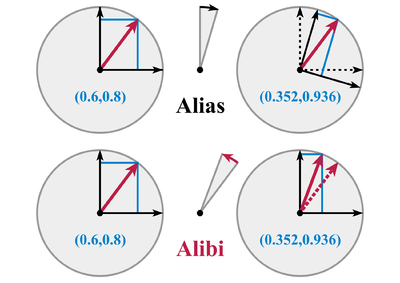
В качестве примера пусть вектор , быть вектором на плоскости. Поворот вектора на угол θ против часовой стрелки задается матрицей вращения : которое можно рассматривать либо как активное преобразование , либо как пассивное преобразование (где приведенная выше матрица будет инвертирована ), как описано ниже.


Пространственные преобразования в евклидовом пространстве R 3 [ редактировать ]
В общем пространственная трансформация может состоять из перевода и линейного преобразования. В дальнейшем перевод будет опущен, а линейное преобразование будет представлено матрицей 3×3. .


трансформация Активная
В качестве активной трансформации преобразует исходный вектор в новый вектор .


Если человек просматривает в качестве нового базиса , то координаты нового вектора в новой базе такие же, как и в в исходной основе. Обратите внимание, что активные преобразования имеют смысл даже в качестве линейного преобразования в другое векторное пространство . Имеет смысл записывать новый вектор в базисе без штриха (как указано выше) только тогда, когда преобразование происходит из пространства в себя.



Пассивная трансформация [ править ]
С другой стороны, когда кто-то смотрит в качестве пассивного преобразования исходный вектор остается неизменным, а система координат и ее базисные векторы преобразуются в обратном направлении, т. е. с обратным преобразованием . [4] Это дает новую систему координат XYZ с базисными векторами:


Новые координаты из относительно новой системы координат XYZ определяются как:



Из этого уравнения видно, что новые координаты определяются выражением

Как пассивное преобразование преобразует старые координаты в новые.
Обратите внимание на эквивалентность двух видов преобразований: координаты новой точки в активном преобразовании и новые координаты точки в пассивном преобразовании одинаковы, а именно

В абстрактных векторных пространствах [ править ]
Различие между активными и пассивными преобразованиями можно увидеть математически, рассматривая абстрактные векторные пространства .
Зафиксируйте конечномерное векторное пространство над полем (думал как или ), и основа из . Этот базис обеспечивает изоморфизм через карту компонентов .







Тогда активное преобразование является эндоморфизмом на , то есть линейное отображение из самому себе. Принимая такое преобразование , вектор трансформируется как . Компоненты по отношению к основе определяются через уравнение . Тогда компоненты трансформировать как .








Пассивное преобразование вместо этого является эндоморфизмом на . Это относится к компонентам: . При условии, что обратим, новый базис определяется, спрашивая, что , откуда выражение можно вывести.





Хотя пространства и изоморфны, они не канонически изоморфны. Тем не менее выбор основы позволяет построить изоморфизм.


Как действия влево и вправо [ править ]
Часто ограничиваются случаем, когда отображения обратимы, так что активные преобразования представляют собой общую линейную группу. преобразований, тогда как пассивные преобразования представляют собой группу .


Тогда преобразования можно понимать как действие в пространстве базисов для . Активная трансформация отправляет основу . При этом пассивное преобразование отправляет основу .




Обратное к пассивному преобразованию гарантирует, что компоненты преобразуются одинаково при и . Таким образом, это дает резкое различие между активными и пассивными преобразованиями: активные преобразования действуют слева на основаниях, а пассивные преобразования действуют справа из-за обратного.
Это наблюдение становится более естественным при просмотре баз как выбор изоморфизма . Пространство базисов эквивалентно пространству таких изоморфизмов, обозначаемому . Активные преобразования, отождествляемые с , действовать дальше слева по композиции, а пассивные трансформации, отождествляемые с действует на справа по предварительному составу.


Это превращает пространство оснований в левое. - торсор и правая -торсор.
С физической точки зрения активные преобразования можно охарактеризовать как преобразования физического пространства, тогда как пассивные преобразования характеризуются как избыточность в описании физического пространства. Это играет важную роль в математической калибровочной теории , где калибровочные преобразования математически описываются картами переходов, действующими справа на слоях.
См. также [ править ]
Ссылки [ править ]
- ^ Крампин, М.; Пирани, ФАЭ (1986). Применимая дифференциальная геометрия . Издательство Кембриджского университета. п. 22.
- ^ Jump up to: Перейти обратно: а б Джозеф К. Дэвидсон, Кеннет Хендерсон Хант (2004). «§4.4.1 Активная интерпретация и активное преобразование» . Роботы и теория винтов: приложения кинематики и статики в робототехнике . Издательство Оксфордского университета. п. 74 и далее . ISBN 0-19-856245-4 .
- ^ Баргманн, Валентин (1957). «Относительность». Обзоры современной физики . 29 (2): 161–174. дои : 10.1103/RevModPhys.29.161 .
- ^ Амидрор, Исаак (2007). «Приложение D: Замечание D.12» . Теория явления Муара: Апериодические слои . Спрингер. п. 346. ИСБН 978-1-4020-5457-0 .
- Дирк Струик (1953) Лекции по аналитической и проективной геометрии , стр. 84, Аддисон-Уэсли .