Метод прямой жесткости
В качестве одного из методов структурного анализа метод прямой жесткости , также известный как метод жесткости матрицы , особенно подходит для компьютерного анализа сложных структур, включая статически неопределенный тип. Это матричный метод, который использует отношения с жесткостью членов для вычисления сил членов и смещений в структурах. Метод прямой жесткости является наиболее распространенной реализацией метода конечных элементов (FEM). При применении метода система должна быть смоделирована как набор более простых, идеализированных элементов, связанных с узлами. Свойства жесткости материала этих элементов затем посредством матричной математики , составленной в одно матричное уравнение, которое регулирует поведение всей идеализированной структуры. Неизвестные смещения и силы структуры могут быть определены путем решения этого уравнения. Метод прямой жесткости образует основу для большинства коммерческих и бесплатных источника конечных элементов.
Метод прямой жесткости возник в области аэрокосмической промышленности . Исследователи смотрели на различные подходы для анализа сложных рамок самолета. Они включали теорию эластичности , энергетические принципы в структурной механике , метод гибкости и метод жесткости матрицы . Именно посредством анализа этих методов метод прямой жесткости появился как эффективный метод, идеально подходящий для компьютерной реализации.
История
[ редактировать ]Между 1934 и 1938 годами AR воротник и WJ Duncan опубликовали первые статьи с представлением и терминологией для матричных систем, которые используются сегодня. Аэроупругие исследования продолжались через Второй мировой войны , но ограничения публикации с 1938 по 1947 год затрудняют отслеживание этой работы. Второй основной прорыв в матричном структурном анализе произошел в течение 1954 и 1955 годов, когда профессор Джон Х. Аргирис систематизировал концепцию сборки элементарных компонентов структуры в систему уравнений. Наконец, 6 ноября 1959 года MJ Turner , руководителя конструктивной динамики Boeing , опубликовал статью, в котором рассказывается о методе прямой жесткости в качестве эффективной модели для компьютерной реализации ( Felippa 2001 ).
Отношения с жесткостью члена
[ редактировать ]Типичная связь с жесткостью члена имеет следующую общую форму:
| ( 1 ) |

где
- m = номер члена m .
- = вектор характерных сил члена, которые являются неизвестными внутренними силами.
- = Матрица жесткости члена, которая характеризует сопротивление члена против деформаций.
- = вектор характерных смещений или деформаций члена.
- = вектор характерных сил члена, вызванные внешними эффектами (такими как известные силы и изменения температуры), применяемые к члену, когда .





Если деформации членов, а не абсолютные смещения, тогда являются независимыми силами членов, и в таком случае (1) могут быть инвертированы, чтобы получить так называемую матрицу гибкости элемента , которая используется в методе гибкости .
Системная жесткость соотношения
[ редактировать ]Для системы со многими членами, связанными с точками, называемыми узлами, отношения с жесткостью членов, такие как уравнение (1), могут быть интегрированы, используя следующие наблюдения:
- Деформации участника может быть выражен в терминах системы узлов r для обеспечения совместимости между членами. Это означает, что R будет основным неизвестным.
- Силы -члены Помогите сохранить узлы в равновесии под узловыми силами r . Это подразумевает, что правая сторона (1) будет интегрирована в правую сторону следующих уравнений узлового равновесия для всей системы:
| ( 2 ) |

где
- = вектор узловых сил, представляющих внешние силы, применяемые к узлам системы.
- = Матрица жесткости системы, которая устанавливается путем сборки матриц жесткости членов .
- = вектор узловых смещений системы, которые могут определить все возможные деформированные конфигурации системы, подверженные произвольным узловым силам r .
- = вектор эквивалентных узловых сил, представляющих все внешние эффекты, кроме узловых сил, которые уже включены в предыдущий вектор узловой силы r . Этот вектор устанавливается путем сборки членов .




Решение
[ редактировать ]Матрица жесткости системы k является квадратной, поскольку векторы R и R имеют одинаковый размер. Кроме того, это симметрично, потому что симметричный. После того, как ограничения поддержки учитываются в (2), узловые смещения обнаруживаются путем решения системы линейных уравнений (2), символически:

Впоследствии характерные силы членов могут быть найдены из уравнения (1), где может быть найдено из R путем соображения совместимости.
Метод прямой жесткости
[ редактировать ]Обычно иметь уравнение (1) в форме, где и соответственно, перемещения и силы в конце члена и силы, соответствующие направлению с r и r . В таком случае, и можно получить путем прямого суммирования матриц членов и Полем Затем метод известен как метод прямой жесткости.
Преимущества и недостатки метода жесткости матрицы сравниваются и обсуждаются в статье метода гибкости .
Пример
[ редактировать ]Авария
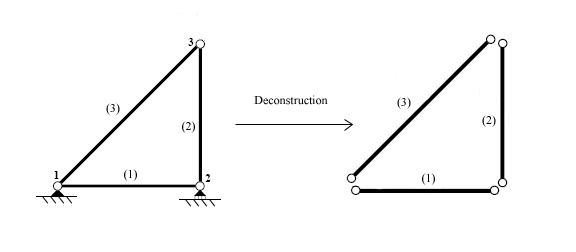
[ редактировать ]Первым шагом при использовании метода прямой жесткости является определение отдельных элементов, которые составляют структуру.
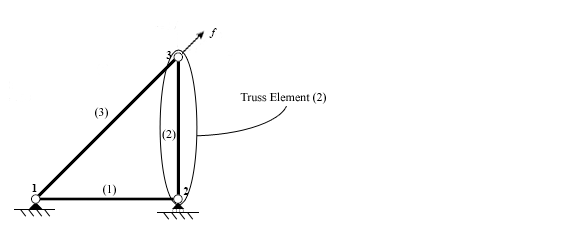
Как только элементы идентифицируются, структура отключается в узлах, точки, которые соединяют различные элементы вместе.
Затем каждый элемент анализируется индивидуально для разработки уравнений жесткости члена. Силы и смещения связаны с помощью матрицы жесткости элемента, которая зависит от геометрии и свойств элемента.
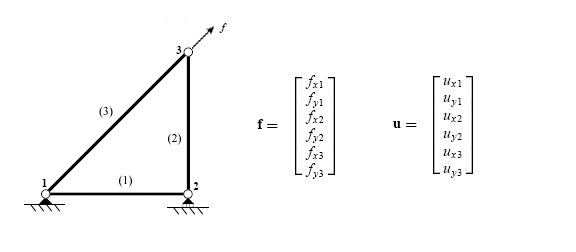
Элемент фермы может передавать только силы в сжатии или натяжении. Это означает, что в двух измерениях каждый узел имеет две степени свободы (DOF): горизонтальное и вертикальное смещение. Полученное уравнение содержит матрицу четырех на четыре жесткости.

Элемент рамы способен выдерживать изгибающие моменты в дополнение к сжатию и натяжению. Это приводит к три степени свободы: горизонтальное смещение, вертикальное смещение и вращение плоскости. Матрица жесткости в этом случае составляет шесть на шесть.

Другие элементы, такие как пластины и оболочки, также могут быть включены в метод прямой жесткости, и должны быть разработаны аналогичные уравнения.
Сборка
[ редактировать ]Как только индивидуальные отношения с жесткостью элемента были разработаны, они должны быть собраны в исходную структуру. Первым шагом в этом процессе является преобразование отношений жесткости для отдельных элементов в глобальную систему для всей структуры. В случае элемента фермы глобальная форма метода жесткости зависит от угла элемента относительно глобальной системы координат (эта система обычно является традиционной декартовой системой координат ).
(Для элемента фермы под углом β) Эквивалентно,

![{\ displaystyle {\ begin {bmatrix} f_ {x1} \\ f_ {y1} \\\ hline f_ {x2} \\ f_ {y2} \ end {bmatrix}} = {\ frac {ea} {l}} \ left [{\ begin {array} {cc | cc} c_ {x} c_ {x} & c_ {x} c_ {y} &-c_ {x} c_ {x} &-c_ {x} c_ {y} \\ c_ {y} c_ {x} & c_ {y} c_ {y} &-c_ {y} c_ {x} &-c_ {y} c_ {y} \\\ hline -c_ {x} c_ {x } &-c_ {x} c_ {y} & c_ {x} c_ {x} & c_ {x} c_ {y} \\-c_ {y} c_ {x} &-c_ {y} c_ {y} & c_ {{x} &-c_ {y} c_ {y} & c_ {{x} &-c_ y} c_ {x} & c_ {y} c_ {y} \\\ end {array}} \ right] {\ begin {bmatrix} u_ {x1} \\ u_ {y1} \\ hline u_ {x2} \ \ u_ {y2} \ end {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e24897e0a82c5be5f294099a3313717bf11caeb6)
где и Являются ли направление косинусов элемента фермы (то есть они являются компонентами единичного вектора, совместимых с элементом). Эта форма показывает, как обобщать жесткость элемента до трехмерных космических ферм, просто расширив шаблон, который очевиден в этой формулировке.


После разработки матрицы жесткости элемента в глобальной системе координат они должны быть объединены в единую матрицу жесткости «мастер» или «глобальная». При объединении этих матриц вместе существуют два правила: совместимость смещений и силового равновесия в каждом узле. Эти правила поддерживаются путем связи элемента узловых смещений с глобальными узловыми смещениями.
Каждый из глобальных перемещения и силовых векторов содержат одну запись для каждой степени свободы в структуре. Матрицы жесткости элемента объединяются путем увеличения или расширения каждой матрицы в конформации с глобальным смещением и нагрузки.
(Для элемента (1) из вышеуказанной структуры)

Наконец, глобальная матрица жесткости построена путем добавления отдельных матриц расширенных элементов.
Решение
[ редактировать ]После того, как глобальная матрица жесткости, вектор смещения и вектор силы была построена, система может быть выражена в виде единого матричного уравнения.

Для каждой степени свободы в структуре известно либо смещение, либо сила.

После вставки известного значения для каждой степени свободы уравнение главной жесткости завершено и готово к оценке. Существует несколько различных методов, доступных для оценки матричного уравнения, включая, помимо прочего, декомпозиция Хоулесского и оценку грубой силы систем уравнений. Если структура не ограничена надлежащим образом, применение силы приведет к жесткому движению, и должны быть добавлены дополнительные условия поддержки.
Метод, описанный в этом разделе, предназначен как обзор метода прямой жесткости. Дополнительные источники следует обратиться к более подробной информации о процессе, а также о допущениях о свойствах материала, присущих процессу.
Приложения
[ редактировать ]Метод прямой жесткости был разработан специально для эффективного и легко реализованного в компьютерное программное обеспечение для оценки сложных структур, которые содержат большое количество элементов. Сегодня почти каждый доступный решатель конечных элементов основан на методе прямой жесткости. В то время как каждая программа использует один и тот же процесс, многие из них были упорядочены, чтобы сократить время вычисления и сократить необходимую память. Чтобы достичь этого, были разработаны ярлыки.
Одной из крупнейших областей для использования метода прямой жесткости является область структурного анализа, где этот метод был включен в программное обеспечение для моделирования. Программное обеспечение позволяет пользователям моделировать структуру, и после того, как пользователь определяет свойства материала элементов, программа автоматически генерирует отношения элемента и глобальные отношения жесткости. Когда применяются различные условия загрузки, программное обеспечение оценивает структуру и генерирует отклонения для пользователя.
Смотрите также
[ редактировать ]- Метод конечных элементов
- Метод конечных элементов в структурной механике
- Структурный анализ
- Метод гибкости
- Список пакетов программного обеспечения конечных элементов
Внешние ссылки
[ редактировать ]- Применение метода прямой жесткости к пружинной системе 1-D
- Матричный структурный анализ
- Анимации моделирования анализа жесткости
Ссылки
[ редактировать ]- Фелиппа, Карлос А. (2001), «Исторический контур матричного структурного анализа: игра в трех актах» (PDF) , компьютеры и структуры , 79 (14): 1313–1324, doi : 10.1016/s0045-7949 (01 ) 00025-6 , ISSN 0045-7949 , архивировано из оригинала (PDF) 2007-06-29 , извлеченные 2005-10-05
- Фелиппа, Карлос А. Введение в метод конечных элементов. Осень 2001 г. Университет Колорадо. 18 сентября 2005 г.
- Робинсон, Джон. Анализ структурной матрицы для инженера. Нью -Йорк: John Wiley & Sons, 1966
- Рубинштейн, Моше Ф. Матричный компьютерный анализ структур. Нью-Джерси: Прентис-Холл, 1966
- McGuire, W., Gallagher, RH и Ziemian, RD Matrix Структурный анализ, 2 -е изд. Нью -Йорк: John Wiley & Sons, 2000.
| Динамический анализ | |||||||
|---|---|---|---|---|---|---|---|
| Статический анализ | |||||||
| Структурные элементы |
| ||||||
| Теории | |||||||