Андрогинная периферийная система крепления
 АПАС-75 (американская версия) | |
| Тип | андрогинный стыковочный механизм |
|---|---|
| Разработчик | RKK Energiya |
| Масса | 286 кг (631 фунт) |
| Хост-космический корабль | |
| Первое использование | 1975 |
| Последнее использование | 2011 |
Термины андрогинная система крепления периферийных устройств ( APAS ), андрогинная система сборки периферийных устройств ( APAS ) и андрогинная система стыковки периферийных устройств ( APDS ). [1] [2] используются как взаимозаменяемые для описания российского семейства механизмов стыковки космических кораблей , а также иногда используются как общие названия для любой системы стыковки в этом семействе. Система, аналогичная APAS-89/95, используется китайским космическим кораблем «Шэньчжоу» . [3]
Обзор
[ редактировать ]Название системы имеет русское происхождение и представляет собой аббревиатуру АПАС на кириллице от русского Андрогинно-периферийный агрегат стыковки ( Андрогинно-периферийный агрегат стыковки ). Английская аббревиатура была разработана так, чтобы состоять из тех же букв, но в латинском алфавите, где первые два слова являются прямыми аналогами букв в оригинале. Третье слово в русском языке происходит от немецкого Aggregat , означающего «сложный механизм», а последнее означает «стыковка». Два последних слова английского названия были выбраны так, чтобы они начинались с тех же букв, что и в русском названии. [ нужна ссылка ]
Идея конструкции заключается в том, что, в отличие от стыковочной системы зонда и тормоза , любое стыковочное кольцо APAS может состыковываться с любым другим стыковочным кольцом APAS; обе стороны андрогинны . В каждой стыковке есть активная и пассивная стороны, но обе стороны могут выполнять любую роль. Существует три основных варианта APAS.
АПАС-75
[ редактировать ]Разработанный совместно американскими и советскими инженерами посредством серии личных встреч, писем и телеконференций, АПАС-75 изначально планировалось использовать в американской миссии на космическую станцию Салют , которая вместо этого стала Аполлоном-Союзом . [4] Между американским и советским вариантом стыковочного механизма имелись различия, но механически они все же были совместимы. Вначале американцы называли это устройство одновременно стыковочным механизмом Международной встречи и стыковки (IRDM) и Международной стыковочной системой. [5] В пресс-пакете НАСА для ASTP устройство называется «Андрогинная периферийная стыковочная система» (APDS). [1]
Дизайн
[ редактировать ]В отличие от предыдущих стыковочных систем, любой блок APAS-75 мог выполнять активную или пассивную роль по мере необходимости. При стыковке лопатообразные направляющие выдвинутого активного блока (справа) и втянутого пассивного блока (слева) взаимодействовали для грубого выравнивания. Кольцо, удерживающее направляющие, сместилось, чтобы совместить защелки активного блока с защелками пассивного блока. После их срабатывания амортизаторы рассеивали остаточную энергию удара в американском агрегате; Механические глушители выполняли ту же функцию на советской стороне. Затем активный блок втянулся, чтобы соединить стыковочные муфты. Направляющие и гнезда в стыковочных кольцах завершили центровку. Четыре пружинных толкателя развалили космический корабль при расстыковке. [6]
Американцы выбрали компанию North American Rockwell для создания семи стыковочных механизмов (двух летных, четырех испытательных и одного запасного). [7]
Советский Союз построил пять космических кораблей «Союз» , на которых использовался АПАС-75. Первые три летали в качестве испытательных систем ( «Космос-638» , «Космос-672» и «Союз-16» ). Один использовался для испытательного проекта «Аполлон-Союз», «Союз-19» был единственным «Союзом», который действительно использовал систему стыковки, а последний летал как «Союз-22» . С американской стороны стыковочный модуль «Аполлон-Союз» нес один стыковочный узел АПАС-75 и один стыковочный узел «Аполлон».
Разработка
[ редактировать ]Этот раздел может быть слишком длинным для удобного чтения и навигации . ( июнь 2024 г. ) |
В апреле 1970 года администратор НАСА Томас О. Пейн на неформальной встрече с российским академиком Анатолием Благонравовым в Нью-Йорке предложил двум странам сотрудничать в вопросах безопасности астронавтов, включая совместимое стыковочное оборудование на космических станциях и космических кораблях, позволяющее проводить спасательные операции в случае чрезвычайных ситуаций в космосе. [8]
Инженер Колдуэлл Джонсон предложил систему кольца и конуса во время встречи в Москве в октябре 1970 года. [9] Борис Н. Петров отверг простую адаптацию «Аполлона» и «Союза» как «космический трюк» и предложил разработать универсальный стыковочный механизм, Джонсон предложил Центру пилотируемых космических кораблей (ЦМП) разработать «конструкцию, специально адекватную требованиям конкретного КСМ». / Миссия «Салют», конструкция которой отражает только фундаментальную форму и функцию стыковочного оборудования, удовлетворяющего требованиям, предъявляемым к совместимой стыковочной системе для будущих космических кораблей». [9]
Во время встречи в Хьюстоне в июне 1971 года советский специалист по стыковке Валентин Бобков отметил, что Советы также отдают предпочтение некоторой версии двойного кольца и конуса. [5] Бобков на эскизах проиллюстрировал, что общий диаметр стыковочной системы не может превышать 1,3 метра, поскольку любая более крупная система потребует замены стартового кожуха. [5] Когда Джонсон поднял вопрос об изменении кожуха, Советы подчеркнули большое влияние, которое такая модификация будет иметь. [5] Помимо разработки нового кожуха, им придется проверить аэродинамику запуска измененного оборудования. [5] Американцы надеялись добиться увеличения туннеля, но такое изменение показалось их коллегам слишком значительным. [5]

После июньских встреч Джонсон поручил Биллу Кризи и его конструкторам-механикам работать над предварительным проектом стыковочного механизма. [5] К тому времени, когда делегация НАСА отбыла в Москву, команда Кризи спроектировала и построила 1-метровую систему стыковки с двойным кольцом и конусом, которая имела четыре направляющих пальца и аттенюаторы на обоих кольцах, так что любая половина могла быть активной или пассивной во время стыковки. [5] Лаборатория структур и механики MSC сняла 16-миллиметровые видеоролики, демонстрирующие эту систему в действии, которые Джонсон привез в Москву в ноябре вместе с буклетом с описанием системы и моделью защелок. [5] К удивлению Джонсона, Владимир Сыромятников работал над вариацией концепции кольца и конуса НАСА с октября прошлого года. [5] Вместо четырех направляющих пальцев в американском предложении Сыромятников предложил три, а вместо гидравлических амортизаторов предложил электромеханические аттенюаторы. [5] По сути, Советы приняли идею использования набора переплетающихся пальцев для направления двух половин стыковочного механизма от точки первоначального контакта к захвату. [5] Концепция использования амортизирующих глушителей на кольце захвата активного космического корабля для смягчения удара двух сближающихся космических кораблей также была приемлемой. [5] Обе группы инженеров планировали втянуть активную половину стыковочного механизма, используя электрическую лебедку для наматывания троса. [5] После втягивания защелки конструкции или корпуса будут задействованы, чтобы соединить два корабля вместе. Прежде чем можно было приступить к проектированию универсальной системы, необходимо было решить три основных вопроса — количество направляющих, тип аттенюаторов и тип структурных защелок. [5]
Джонсон, Кризи и другие инженеры отдела проектирования космических аппаратов хотели использовать четыре направляющие, поскольку считали, что это обеспечивает наилучшую геометрию при использовании гидравлических аттенюаторов. [5] Как впоследствии объяснил Билл Кризи, наиболее вероятной ситуацией отказа при использовании гидравлических аттенюаторов будет утечка, которая приведет к разрушению одного амортизатора при ударе. [5] Изучение различных комбинаций привело специалистов MSC к выводу, что оптимальной конструкцией являются четыре направляющие и восемь амортизаторов. [5] Кризи также отметил, что наиболее вероятной неисправностью электромеханической системы будет зависание или заедание одной из пар аттенюаторов. [5] Таким образом, Советы стремились свести к минимуму количество пар в своей системе по той же причине, по которой американцы предпочитали большее их количество, чтобы ограничить вероятность того, что что-то пойдет не так. [5]
Поскольку Соединенные Штаты не имели значительного инженерного или аппаратного обеспечения в предлагаемой конструкции, а СССР имел значительную долю участия в предложенной конструкции, советская конструкция была выбрана в качестве основы для следующего этапа исследования. [5]
К концу встречи в ноябре-декабре обе команды подписали протокол, в котором изложена основная концепция универсальной андрогинной стыковочной системы. [5] В официальном заявлении говорилось: «Концепция конструкции включает в себя кольцо, оснащенное направляющими и защелками, расположенными на подвижных стержнях, служащих аттенюаторами и втягивающими приводами, и стыковочное кольцо, на котором расположены периферийные сопрягаемые защелки со стыковочным уплотнением». [5] В протокол также была включена основная информация о формах и размерах направляющих. [5] Они должны были быть твердыми, а не стержнеобразными; как впервые было предложено Советским Союзом, и их было три. [5] Пока требования по поглощению стыковочных сил соблюдались, каждая сторона имела право реализовать фактическую конструкцию аттенюатора по своему усмотрению. [5] Советы планировали использовать электромеханический подход, разработанный для стыковочного корабля «Союз», а американцы предлагали использовать гидравлические амортизаторы, аналогичные тем, которые использовались на зонде «Аполлон». [5] Это предложение также предусматривало разработку стыковочного оборудования, которое можно было бы использовать как в активном, так и в пассивном режиме; когда система одного корабля была активной, другая была пассивной. [5]
Изучив детальную конструкцию механизма, обе стороны также договорились, что защелки будут соответствовать конструкции, разработанной в MSC, а структурные защелки и кольцо будут соответствовать советскому образцу. [5] Эти парные комплекты крюков успешно применялись как на «Союзе», так и на «Салюте». [5] Кроме того, группа согласовала детали, касающиеся установочных штифтов, пружинных двигателей (для облегчения отделения космического корабля при расстыковке) и расположения электрических разъемов. [5] Чтобы оценить концепцию стыковочной системы и обеспечить совместимость на раннем этапе разработки, специалисты планировали построить тестовую модель в масштабе две пятых, точные детали которой будут определены на следующем совместном совещании. [5]
По возвращении в Хьюстон Колдуэлл Джонсон подготовил меморандум, в котором задокументированы некоторые неофициальные договоренности, достигнутые в Москве. [5] Он отметил, что это отражается «на том, как две страны будут проводить и координировать следующий этап инженерных исследований этих систем... Договоренности... чаще всего достигались за пределами официальных встреч, и то же самое иначе вряд ли будет сообщено». [5] Например, что касается диаметра люка, он отметил, что «с самого начала стало очевидно… что диаметр люка, превышающий примерно 800 мм, не может быть встроен в космический корабль «Салют» без больших трудностей», но у MSC «долгое время так как смирился" с тестовым люком диаметром менее 1 метра. [5] Джонсон далее прокомментировал, что «узел захватного кольца по-разному назывался кольцом и конусом, двойным кольцом и конусом и кольцом и пальцами. [5] Отныне было решено называть захватывающее кольцо «кольцом», а пальцы — «направляющими». [5]
Билл Кризи и несколько его коллег работали с Евгением Геннадьевичем Бобровым за чертежным столом, чтобы разработать эти первые советско-американские инженерные чертежи. [10] Ларри Рэтклифф нарисовал захватывающее кольцо и направляющие на чертежной бумаге, Роберт МакЭля предоставил детали структурного соединительного кольца, а Бобров подготовил аналогичный чертеж для структурных защелок. [10] Затем Т.О. Росс взял эти чертежи и провел анализ размеров, чтобы убедиться, что все элементы совместимы. [10] Соглашение о технических спецификациях стыковочной системы открыло НАСА возможность начать переговоры с Роквеллом о создании стыковочной системы. [10]
В апреле 1972 года Советы проинформировали НАСА, что они решили использовать космический корабль «Союз» вместо космической станции «Салют» по экономическим и техническим причинам. [4]
Окончательное официальное одобрение совместной стыковочной миссии было получено в Москве 24 мая 1972 года. Президент США Никсон и премьер-министр СССР Алексей Косыгин подписали Соглашение о сотрудничестве в исследовании и использовании космического пространства в мирных целях, включая разработку совместимых систем стыковки космических кораблей. повысить безопасность пилотируемых космических полетов и сделать возможным совместные научные эксперименты. [8] Первый полет для проверки систем должен был состояться в 1975 году на модифицированных космических кораблях «Аполлон» и «Союз». [8] Ожидалось, что помимо этой миссии будущие пилотируемые космические корабли двух стран смогут стыковаться друг с другом. [8]

В июле 1972 года группа сосредоточилась на более подробном составлении спецификаций стыковочной системы. [11] Некоторые доработки были внесены в направляющие и другие части механизма; как и в случае с другими группами, был составлен график на предстоящие месяцы с указанием документов, которые необходимо подготовить, и проведения тестов. [11] После того, как команда тщательно изучила американскую стыковочную систему в масштабе двух пятых, что помогло конструкторам обсудить работу механизма и принять решение о доработках, на декабрь были запланированы совместные испытания модели. [11] Тогда инженеры смогут увидеть, как взаимодействующие элементы системы одной страны сочетаются с элементами другой. [11] Советы заявили, что разработают «План испытаний масштабных моделей стыковочной системы «Аполлон»/Союз» (IED 50003), в то время как американцы нарисовали размеры модели и испытательных приспособлений. [11]
Под руководством Сыромятникова советская группа подготовила документацию на английском и русском языках и подготовила к совместному совещанию модель стыковочной системы в масштабе две пятых. [12] Некоторые американцы заметили, что, хотя механизм СССР был более сложным механически, чем американский, он был пригоден для выполнения поставленной задачи и «сложнее» в ее исполнении. [12] Обе стороны рассмотрели и подписали план испытаний модели на две пятых и назначили испытания на декабрь в Москве. [12]
Предварительный обзор систем (PSR) планировался как «формальный обзор конфигурации… начатый ближе к концу концептуальной фазы, но до начала рабочего проектирования» работы над стыковочным механизмом. [12] В рамках своей презентации Совету по предварительному обзору систем (в который входят технические директора) Дон Уэйд и Сыромятников включили все данные испытаний, спецификации и чертежи стыковочной системы, а также оценку конструкции механизма. Выслушав отчет, Ланни и Бушуев почувствовали, что три проблемные области нуждаются в дальнейшем изучении. [12] Во-первых, их внимание привлекла потребность в пружинном двигателе, предназначенном для разделения двух космических кораблей, поскольку неспособность этого двигателя сжать должным образом могла помешать завершению стыковки. [12] Во-вторых, Ланни и Бушуев подчеркнули важность индикатора, который бы проверял правильность установки структурных защелок. [12] Американская система давала информацию о функционировании каждой защелки, но не указывала на сжатие стыковочных пломб, тогда как советская система давала данные о сжатии пломб, но не указывала на защелки. [12] Чтобы обеспечить структурную целостность переходного туннеля, важно было знать, что все восемь задвижек закрыты. [12] Третья проблемная область заключалась в том, возможно ли случайное открытие структурных защелок. [12] Бушуев и Ланни призвали к тщательной переоценке всех этих вопросов и посоветовали группе представить им свои конкретные рекомендации в декабре и январе. [12]
Групповые испытания модели в масштабе две пятых и вторая часть предварительного обзора систем стыковочной системы были последним совместным мероприятием, запланированным на 1972 год. [13] Американцы прибыли в Москву 6 декабря и работали до 15 декабря. [13] Тестирование масштабной модели происходило в Институте космических исследований в Москве. [13]
Испытания полномасштабных советских и американских стыковочных систем начались в Хьюстоне в октябре 1973 года. [14]
АПАС-89
[ редактировать ]

Когда СССР начал работу над «Миром» , они также работали над программой шаттла «Буран» . АПАС-89 задумывался как система стыковки «Бурана» с орбитальной станцией «Мир». Конструкция АПАС-75 была сильно модифицирована. Внешний диаметр был уменьшен с 2030 мм до 1550 мм, а юстировочные лепестки были направлены внутрь, а не наружу. Это ограничивало внутренний диаметр стыковочного порта примерно до 800 мм. [15] Шаттл «Буран» был окончательно закрыт в 1994 году и так и не долетел до космической станции «Мир», но модуль « Кристалл » был оснащен двумя стыковочными механизмами АПАС-89. Стыковочный модуль «Мир» , по сути, промежуточный модуль между «Кристаллом» и «Шаттлом», также использовал АПАС-89 с обеих сторон.
АПАС-95
[ редактировать ]

АПАС был выбран для программы «Шаттл-Мир» и произведен российской компанией РКК «Энергия» по контракту стоимостью 18 миллионов долларов, подписанному в июне 1993 года. [16] Rockwell International, генеральный подрядчик Шаттла, приняла поставку оборудования от «Энергии» в сентябре 1994 года. [16] и интегрировал его в систему стыковки орбитальных кораблей Space Shuttles, надстройку, которая была установлена в отсеке для полезной нагрузки и изначально предназначалась для использования с космической станцией Freedom .
Хотя код APAS «Шаттла» компании «Энергия» — APAS-95, по описанию он по сути такой же, как APAS-89. [17] Его масса составляла 286 кг. [16]
APAS-95 был выбран для соединения американского и российского модулей Международной космической станции (МКС) и обеспечения возможности стыковки космического корабля "Шаттл". Система стыковки орбитального корабля «Шаттл» осталась неизменной с тех пор, как она использовалась в программе «Шаттл-Мир» в 1995 году. Активное кольцо захвата , которое выходит наружу от космического корабля, захватило пассивное стыковочное кольцо на соединении APAS-95 космической станции на герметичном стыковочном адаптере . Захватное кольцо выровняло их, стянуло вместе и задействовало 12 структурных крючков, герметично зафиксировав две системы. Сопряженные адаптеры под давлением постоянно пассивны.
АСА-Г/АСП-Г
[ редактировать ]

Он используется только шлюзом науки (или эксперимента) «Наука» для швартовки в передовой порт «Наука» 4 мая 2023 года, 01:00 UTC во время выхода в открытый космос ВКД-57. Неандрогинный механизм причаливания является уникальной гибридной модификацией российской системы АПАС-89/АПАС-95, поскольку имеет 4 лепестка вместо 3, а также 12 конструктивных крюков и представляет собой комбинацию активного мягкого «зонда и тормоза». механизм стыковки в порту и пассивная мишень в шлюзовой камере. [18]
Изображения
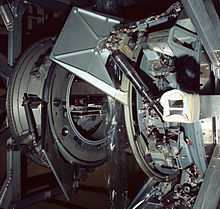
[ редактировать ] АПАС в корабля "Шаттл-Мир" стыковке
АПАС в корабля "Шаттл-Мир" стыковке Стыковочная система орбитального корабля (внизу, белая), APAS-95 (в центре, бело-серая) и ПМА-3 (вверху, черно-серая)
Стыковочная система орбитального корабля (внизу, белая), APAS-95 (в центре, бело-серая) и ПМА-3 (вверху, черно-серая)


См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Jump up to: а б «Испытательный проект «Аполлон-Союз»: Информация для прессы: 1975 г.» (PDF) . НАСА. 1975 год . Проверено 2 ноября 2015 г.
- ^ Хизер Хинке; Мэтью Струбе; Джон Дж. Зипей; Скотт Крайан (5 марта 2016 г.). «Разработка технологии автоматизированных датчиков сближения и стыковки/захвата, а также механизма стыковки для пилотируемой миссии по перенаправлению астероида» (PDF) . НАСА . Проверено 30 октября 2015 г.
- ^ «Свидетельство Джеймса Оберга: Слушания в Сенате по науке, технологиям и космосу: Международная программа исследования космоса» . spaceref.com. 27 апреля 2004 года . Проверено 7 апреля 2008 г. [ постоянная мертвая ссылка ]
- ^ Jump up to: а б Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «СП-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: апрель в Москве» . НАСА . Проверено 2 ноября 2015 г.
- ^ Jump up to: а б с д и ж г час я дж к л м н тот п д р с т в v В х и С аа аб и объявление но из в ах есть также и Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «СП-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: Международная стыковочная система» . НАСА . Проверено 2 ноября 2015 г.
- ^ Дэвид С. Ф. Портри. «Мирское аппаратное наследие» (PDF) . Космический центр Линдона Б. Джонсона . Архивировано из оригинала (PDF) 10 апреля 2008 года . Проверено 5 апреля 2008 г.
- ^ Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «СП-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: оценка стоимости миссии» . НАСА . Проверено 2 ноября 2015 г.
- ^ Jump up to: а б с д Хелен Т. Уэллс; Сьюзан Х. Уайтли; Кэрри Э. Кареганнес (1975). «Происхождение названий НАСА: пилотируемый космический полет» . НАСА . Проверено 2 ноября 2015 г.
- ^ Jump up to: а б Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «SP-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: исследовательская группа» . НАСА . Проверено 2 ноября 2015 г.
- ^ Jump up to: а б с д Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «СП-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: проектирование интерфейса» . НАСА . Проверено 2 ноября 2015 г.
- ^ Jump up to: а б с д и Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «SP-4209 Партнерство: история испытательного проекта «Аполлон-Союз»: июль в Хьюстоне» . НАСА . Проверено 2 ноября 2015 г.
- ^ Jump up to: а б с д и ж г час я дж к Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «СП-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: предварительный обзор систем (этап I)» . НАСА . Проверено 2 ноября 2015 г.
- ^ Jump up to: а б с Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «СП-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: предварительный обзор систем (этап 2)» . НАСА . Проверено 2 ноября 2015 г.
- ^ Эдвард Клинтон Эзелл; Линда Нойман Эзелл (1978). «СП-4209 Партнерство: История испытательного проекта «Аполлон-Союз»: годы напряженной деятельности» . НАСА . Проверено 2 ноября 2015 г.
- ^ Джон Кук; Валерий Аксаментов; Томас Хоффман; Уэс Брунер (2011). «Механизмы интерфейса МКС и их наследие» (PDF) . Боинг . Проверено 9 июня 2021 г.
- ^ Jump up to: а б с Эванс, Бен (2014). Двадцать первый век в космосе . Спрингер. п. 186. ИСБН 9781493913077 .
- ^ Барт Хендрикс; Берт Вис (2007). Энергия-Буран: советский космический корабль . Чичестер, Великобритания: Praxis Publishing Ltd., стр. 379–381. ISBN 978-0-387-69848-9 .
Хотя внутреннее обозначение АПАС «Шаттла» у «Энергии» — АПАС-95, по сути оно такое же, как АПАС-89 у «Бурана».
- ^ «Модуль МЛМ Наука будет иметь три стыковочных порта» . russianspaceweb.com . Проверено 4 июля 2023 г. (требуется подписка)
Внешние ссылки
[ редактировать ]

Компоненты Мира |
|---|
