Канадарм
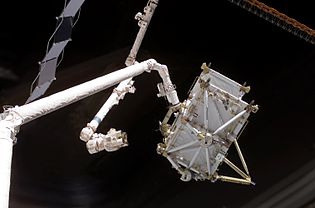
 Canadarm (справа) во время миссии космического корабля "Шаттл" STS-72. | |
| Оператор | НАСА |
|---|---|
| Производитель | Спар Аэроспейс |
| Тип инструмента | роботизированная рука |
| Веб-сайт | www |
| Характеристики | |
| Масса |
|
| Размеры | 1520 см × 38 см (598 × 15 дюймов) |
| Номер запущен | 5 |
| Хост-космический корабль | |
| Космический корабль | Космический шаттл |
| Оператор | НАСА |
| Запуск сайта | Кеннеди LC-39 |
Canadarm или Canadarm1 (официальное название Shuttle Remote Manipulator System или SRMS , также SSRMS ) — это серия роботизированных манипуляторов , которые использовались на орбитальных кораблях космического корабля «Шаттл» для развертывания, маневрирования и захвата полезной нагрузки . После космического корабля «Колумбия» катастрофы Canadarm всегда работал в паре с системой датчиков стрелы орбитального корабля (OBSS), которая использовалась для проверки внешней части шаттла на предмет повреждений системы тепловой защиты .
Разработка
[ редактировать ]
В 1969 году Канаду (НАСА) пригласило Национальное управление по аэронавтике и исследованию космического пространства принять участие в программе «Спейс шаттл» . [1] В то время еще не было решено, что повлечет за собой это участие, но система манипулятора была определена как важный компонент. [1] Канадская компания DSMA ATCON разработала робота для загрузки топлива в ядерные реакторы CANDU ; этот робот привлек внимание НАСА. [1] В 1975 году НАСА и Канадский национальный исследовательский совет (NRC) подписали меморандум о взаимопонимании, согласно которому Канада будет разрабатывать и создавать Canadarm. [2]
NRC заключила контракт на поставку манипулятора с компанией Spar Aerospace (ныне MDA ). [3] В рамках этого контракта на проектирование, разработку, испытания и оценку были построены три системы: инженерная модель для помощи в проектировании и тестировании Canadarm, квалификационная модель, которая была подвергнута экологическим испытаниям для квалификации конструкции для использования в космосе, и летная единица.
Конечный эффектор
[ редактировать ]Энтони «Тони» Зубжицки, инженер-конструктор DSMA ATCON, [4] будучи прикомандированным к SPAR, он разработал концепцию концевого эффектора Canadarm, вдохновленную эластичной лентой вокруг его пальцев. [4] Зубжицки официально представил эту концепцию представителям НАСА. [4] Фрэнк Ми, руководитель лаборатории механических разработок SPAR, построил прототип концевого эффектора на основе концепции Тони, и это заслуга SPAR. [4] как изобретатель концевого эффектора Canadarm. Трехпроводная кроссоверная конструкция победила когтеобразные механизмы и другие, такие как модель диафрагмы камеры, [4] которые рассматривались.
Органы управления и программное обеспечение
[ редактировать ]Основные алгоритмы управления были разработаны SPAR и субподрядчиком Dynacon Inc. из Торонто . Компания CAE Electronics Ltd. в Монреале предоставила панель дисплея и управления, а также ручные контроллеры, расположенные в кормовой части кабины экипажа шаттла. Другие электронные интерфейсы, сервоусилители и стабилизаторы питания, расположенные на Canadarm, были спроектированы и изготовлены SPAR на заводе в Монреале. Графитовая композитная стрела, обеспечивающая структурное соединение плечевого и локтевого суставов, и аналогичная стрела, соединяющая локоть с запястьем, были произведены компанией General Dynamics в США . Компания Dilworth, Secord, Meagher and Associates, Ltd. в Торонто получила контракт на производство конечного эффектора инженерной модели, после чего SPAR разработал конструкцию и произвел квалификационные и летные блоки. Программное обеспечение для полета космического корабля "Шаттл", которое контролирует и управляет Canadarm, было разработано в Хьюстоне , штат Техас , подразделением Federal Systems компании IBM . Подразделение космических транспортных систем Rockwell International спроектировало, разработало, испытало и построило системы, используемые для крепления Canadarm к отсеку полезной нагрузки орбитального корабля.
Церемония приемки НАСА прошла в отделении RMS Spar в Торонто 11 февраля 1981 года. [1] Здесь Ларкин Кервин , тогдашний глава NRC, дал SRMS неофициальное название Canadarm. Первоначально этот термин был придуман доктором Уолли Червински для использования Ларкином Кервином во время его выступления на пресс-конференции. [1] Менеджер проекта NRC Canadarm д-р Арт Хантер работал с коллегами из НАСА и Spar над добавлением канадского флага и словесного знака на руку, чтобы цвета Канады сочетались с цветами США.
Первый Canadarm был доставлен НАСА в апреле 1981 года. [5] Астронавт Джудит Резник НАСА разработала программное обеспечение и бортовые рабочие процедуры для системы. [6] Всего было построено и доставлено в НАСА пять рукавов — №№ 201, 202, 301, 302 и 303. Рука 302 погибла в результате аварии «Челленджера» . [7]
Дизайн и возможности
[ редактировать ]
Оригинальный Canadarm был способен развертывать в космосе полезную нагрузку весом до 65 000 фунтов (29 000 кг). [8] В середине 1990-х годов система управления вооружением была модернизирована, чтобы увеличить грузоподъемность до 586 000 фунтов (266 000 кг) для поддержки операций по сборке космической станции. [9] Несмотря на то, что двигатели манипуляторов способны маневрировать в космосе полезной нагрузкой массой загруженного автобуса, они не могут поднимать собственный вес манипулятора, когда он находится на земле. [3] Поэтому НАСА разработало модель руки для использования в своем учебном центре в Космическом центре Джонсона, расположенном в Хьюстоне , штат Техас . Canadarm также может извлекать, ремонтировать и развертывать спутники, предоставлять мобильную выдвижную лестницу для членов экипажа , работающего в открытом космосе, для рабочих мест или ограничителей для ног, а также использоваться в качестве средства проверки, позволяющего членам летного экипажа просматривать поверхности орбитального аппарата или полезной нагрузки через телекамера на Canadarm.
Базовая конфигурация Canadarm состоит из манипулятора, дисплея Canadarm и панели управления, включая ручные контроллеры вращения и поступательного движения на станции экипажа в кормовой части кабины орбитального корабля, а также интерфейсного блока контроллера манипулятора, который взаимодействует с компьютером орбитального корабля. Один член экипажа управляет Canadarm с поста управления в кормовой кабине экипажа, а второй член экипажа обычно помогает с работой телекамеры. Это позволяет оператору Canadarm наблюдать за работой Canadarm через полезную нагрузку в кормовой части кабины экипажа и потолочные окна, а также через мониторы замкнутого телевидения на станции в кормовой части кабины экипажа.
Canadarm оснащен взрывным механизмом, позволяющим выбросить руку за борт. Эта система безопасности позволила бы закрыть двери отсека полезной нагрузки Орбитального аппарата в случае, если рычаг вышел из строя в выдвинутом положении и его нельзя было втянуть. [3]
Canadarm имеет длину 15,2 метра (50 футов), диаметр 38 сантиметров (15 дюймов) и шесть степеней свободы . Он весит 410 кг (900 фунтов) сам по себе и 450 кг (990 фунтов) как часть всей системы. У Canadarm есть шесть суставов, которые примерно соответствуют суставам человеческой руки: плечевые суставы по рысканию и тангажу, локтевой сустав по тангажу, а также суставы по тангажу, рысканью и крену запястья. [10] Концевой эффектор — это устройство на конце запястья, которое захватывает захват полезной нагрузки . Два легких сегмента стрелы называются верхним и нижним рычагами. Верхняя стрела соединяет плечевой и локтевой суставы, а нижняя — локтевой и лучезапястный суставы. [11] [10]
История обслуживания
[ редактировать ]
Имитация Canadarm, установленная на космическом шаттле «Энтерпрайз», была замечена, когда двери отсека полезной нагрузки прототипа орбитального корабля были открыты для испытаний ангара в начале программы «Спейс шаттл». [12] Впервые Canadarm был испытан на орбите в 1981 году во время космического корабля "Колумбия " миссии STS-2 . Его первое оперативное использование было на STS-3 для развертывания и маневрирования пакета плазменной диагностики. [7] Впоследствии Canadarm совершил более 90 миссий со всеми пятью орбитальными аппаратами.
С момента установки Canadarm2 на Международной космической станции (МКС) эти два рычага использовались для передачи сегментов станции для сборки с Canadarm орбитального аппарата на Canadarm2; Использование обоих элементов в тандеме заслужило в средствах массовой информации прозвище «канадское рукопожатие». [13]
Выход на пенсию
[ редактировать ]90-я и последняя миссия шаттла Canadarm состоялась в июле 2011 года на STS-135 , доставив Raffaello MPLM на МКС и обратно. Он выставлен вместе с Атлантисом в комплексе для посетителей Космического центра Кеннеди . Canadarm компании Discovery выставлен рядом с ним в Центре Удвар-Хази Национального музея авиации и космонавтики . [14] Endeavour оставил свою OBSS на Международной космической станции в рамках своей последней миссии , а его Canadarm изначально планировалось выставить в штаб-квартире Канадского космического агентства (CSA). [14] Однако Endeavour Canadarm компании сейчас находится в постоянной экспозиции Канадского музея авиации и космонавтики в Оттаве . [15] [16] [17] Последний из канадских аппаратов, летавших в космос, SRMS, доставленный на борт Атлантиды на STS-135 в июле 2011 года, был отправлен в Космический центр НАСА имени Джонсона в Хьюстоне для инженерных исследований и возможного повторного использования в будущей миссии. [18]
Производные
[ редактировать ]Канадарм2
[ редактировать ]Основанный на Canadarm1, более крупный Canadarm2 используется для швартовки ферм, коммерческого транспорта и проверки всей Международной космической станции .
Канадарм3
[ редактировать ]Меньший Canadarm3 будет использоваться для швартовки модулей и проверки Лунных ворот . [19] В июне 2024 года полный контракт на проектирование и строительство рукава был заключен с MDA Space . [20]
В популярных СМИ
[ редактировать ]- 13 ноября 2012 года Google Canada разместила на своей домашней странице поиска рисунок в честь 31-й годовщины первого использования Canadarm в космосе. [21]
- Начиная с 7 ноября 2013 года, Canadarm2 был нанесен на обратную сторону канадской банкноты в пять долларов .
См. также
[ редактировать ]- Список канадских изобретений и открытий
- Dextre — роботизированная рука на МКС
- Европейский роботизированный манипулятор – роботизированный манипулятор, установленный на Российском сегменте МКС.
- Кибо (модуль МКС) § Система дистанционного манипулятора
- Мобильная система обслуживания - роботизированная система на борту Международной космической станции.
- «Стрела» — российский кран на Международной космической станции.
Ссылки
[ редактировать ]- ^ Jump up to: а б с д и Дотто, Лидия (1992). Наследие совершенства: 25 лет в Spar Aerospace Limited . Дэвид Стил. Канада: Spar Aerospace Limited. стр. 41–42. ISBN 0-9696618-0-0 .
[Фрэнк] Ми — изобретатель руки Canadarm, технически известной как «конечный эффектор».
- ^ Уилкс, Брайан (2004). Просмотр научных исследований на федеральном уровне в Канаде: история, исследовательская деятельность и публикации . Университет Торонто Пресс. п. 117. ИСБН 9780802088116 . Проверено 22 ноября 2013 г.
- ^ Jump up to: а б с Гарри Линдберг. «Канада и ее связи с университетом» . Журнал «У инженера» . Университет Альберты. Архивировано из оригинала 29 ноября 2004 года . Проверено 7 декабря 2011 г.
- ^ Jump up to: а б с д и Мельбурн, Джеймс В. (2001). Заставьте ветер дуть . Heirloom Publishing Inc., стр. 62–77. ISBN 0-9694247-8-7 .
- ^ «Система дистанционного манипулятора «Шаттл» - Canadarm» . IEEE Канада . Проверено 22 ноября 2013 г.
- ^ Женщины-инженеры: новый взгляд на научные достижения и влияние женщин , Джилл С. Титджен, Springer 2016, стр. 72
- ^ Jump up to: а б «История полетов Canadarm» . Канадское космическое агентство. 28 октября 2011 года . Проверено 27 октября 2012 г.
- ^ Демео, Мэн (январь 1990 г.). «ДИСТАНЦИОННАЯ СИСТЕМА МАНИПУЛЯТОРА (RMS) - ОБСЛЕДОВАНИЕ ТЕХНИКО-ТЕХНИКО-ТЕХНИКО-ТЕХНИКО-ТЕХНИКИ ЛЕТНОГО ЭКСПЕРИМЕНТА НА ОСНОВЕ УПРАВЛЕНИЯ И СТРУКТУР (CSI)» (PDF) .
- ^ «Роботизированная рука космического корабля «Шаттл Canadarm» отмечает 25 лет пребывания в космосе» .
- ^ Jump up to: а б « Структура Канадырм » . Архивировано из оригинала 10 июня 2020 года . Проверено 19 мая 2020 г.
- ^ « RMS: СИСТЕМА РАЗВЕРТЫВАНИЯ И ПОЛУЧЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ » . Архивировано из оригинала 31 декабря 2016 года . Проверено 20 февраля 2007 г.
- ^ Рэй, Джастин (5 января 2011 г.). «Ангар космического корабля Ванденберг» . Космический полет сейчас . Проверено 27 октября 2012 г.
- ^ «Полет в космос: рукопожатие Canadarm?» . Новости ЦБК . 11 августа 2006 года . Проверено 27 января 2024 г.
- ^ Jump up to: а б Крис Гебхардт (17 ноября 2010 г.). «Планы выхода на пенсию Discovery дают представление о судьбе роботизированной руки» . НАСАКосмический полет . Проверено 27 октября 2012 г.
- ^ Энди Джонсон (2 мая 2013 г.). «Открывая экспонат, Хэдфилд отправляет из космоса первую «последнюю команду» Canadarm» . Новости КТВ . Проверено 2 мая 2013 г.
- ^ Элизабет Хауэлл (2 мая 2013 г.). «Роботизированная рука космического корабля шаттла выставлена в Канадском музее» . Space.com . Проверено 2 мая 2013 г.
- ^ Канадское космическое агентство (2 мая 2013 г.). «Министр Мур представляет выставку национальной космической иконы Канады: Canadarm» . Канадское космическое агентство . Архивировано из оригинала 6 мая 2013 года . Проверено 1 июля 2013 г.
- ^ «Canadarm на выставке: рука робота космического корабля представлена в Канадском музее» . 2 мая 2013 г.
- ^ Семенюк Иван (28 февраля 2019 г.). «Космическая программа Канады устанавливает новый курс с исторической приверженностью лунному аванпосту» . Глобус и почта . Торонто . Проверено 3 марта 2019 г.
- ^ Агентство Canadian Space (27 июня 2024 г.). «Канада начинает детальное проектирование, строительство и тестирование Canadarm3 для Gateway» . www.canada.ca . Проверено 29 июня 2024 г.
- ^ «Дудл Google в честь Canadarm в 31 год» . Новости ЦБК . 13 ноября 2012 года . Проверено 13 ноября 2012 г.