Мобильная система обслуживания


Мобильная система обслуживания ( МСС ) — роботизированная система на борту Международной космической станции (МКС). Запущенный на МКС в 2001 году, он играет ключевую роль в сборке и обслуживании станции; он перемещает оборудование и материалы по станции, поддерживает астронавтов, работающих в космосе, обслуживает инструменты и другую полезную нагрузку, прикрепленную к МКС, и используется для внешнего обслуживания. Астронавты проходят специальную подготовку, позволяющую им выполнять эти функции с помощью различных систем ПСС.
МСС состоит из трех компонентов:
- Система дистанционного манипулятора космической станции (SSRMS), известная как Canadarm2 .
- Базовая система мобильного удаленного обслуживания (MBS).
- ( SPDM Ловкий манипулятор специального назначения , также известный как «Dextre» или «Канадская рука» ).
Система может перемещаться по рельсам на интегрированной ферменной конструкции, установленной на тележке мобильного транспортера, предоставленной США, на которой установлена базовая система MRS. Программное обеспечение системы управления было написано на языке программирования Ada 95 . [1]
MSS был разработан и изготовлен компанией MDA (ранее подразделения MacDonald Dettwiler Associates назывались MDA Space Missions , MD Robotics и ранее назывались SPAR Aerospace) для Канадского космического агентства вклада в создание Международной космической станции.
Канадарм2
[ редактировать ]




Официально известна как Система дистанционного манипулятора космической станции (SSRMS). Этот манипулятор второго поколения , запущенный на STS-100 в апреле 2001 года, представляет собой более крупную и усовершенствованную версию космического корабля "Шаттл оригинального канадского манипулятора " . Canadarm2 имеет длину 17,6 м (58 футов) в полностью выдвинутом состоянии и имеет семь моторизованных шарниров («локтевой» шарнир посередине и три вращающихся шарнира на каждом из концов «запястье/плечо»). Он имеет массу 1800 кг (4000 фунтов) и диаметр 35 см (14 дюймов) и изготовлен из титана. Рука способна выдерживать большие полезные нагрузки до 116 000 кг (256 000 фунтов) и помочь при стыковке космического корабля. Он самостоятельно перемещается и может перемещаться из стороны в сторону, достигая многих частей космической станции движением, напоминающим червяка . В этом движении оно ограничено только количеством приспособлений для захвата данных о мощности (PDGF) на станции. PDGF, расположенные вокруг станции, обеспечивают питание, данные и видео на руку через любой из двух ее двух фиксирующих концевых эффекторов (LEE). Рука также может перемещаться по всей длине фермы космической станции с помощью мобильной базовой системы.
Помимо перемещения по станции, стрела может перемещать любой объект с помощью захвата . При строительстве станции рычаг использовался для перемещения больших сегментов на место. Его также можно использовать для захвата непилотируемых кораблей, таких как SpaceX Dragon , Cygnus космический корабль и японский транспортный корабль H-II (HTV), которые оснащены стандартным захватным приспособлением, которое Canadarm2 использует для захвата и стоянки космического корабля. Рука также используется для расстыковки и освобождения космического корабля после использования.
Бортовые операторы видят, что они делают, глядя на три ЖК-экрана роботизированной рабочей станции (RWS). МСС имеет два блока RWS: один в «Дестини» модуле , другой в « Куполе» . Одновременно только один RWS управляет MSS. RWS имеет два набора джойстиков управления: один контроллер вращения (RHC) и один контроллер поступательного движения (THC). В дополнение к этому есть панель дисплея и управления (DCP) и портативный компьютер (PCS).
В последние годы большинством роботизированных операций управляют дистанционно диспетчеры полета на земле в Центре управления полетами Кристофера К. Крафта-младшего или из Канадского космического агентства Космического центра имени Джона Х. Чепмена . Операторы могут работать посменно для достижения целей с большей гибкостью, чем это делают операторы бортового экипажа, хотя и в более медленном темпе. Операторы-космонавты используются для срочных операций, таких как посещение транспортных средств и работа в открытом космосе с поддержкой робототехники .
Незадолго до 12 мая 2021 года в «Канадарм2» ударил небольшой кусок орбитального мусора, повредивший его тепловое одеяло и одну из стрел. [2] Судя по всему, его работа не пострадала. [2]
Canadarm 2 также поможет причалить модули космической станции Axiom к МКС . [3] [4]
Защелкивающиеся концевые эффекторы
[ редактировать ]

Canadarm2 имеет два LEE, по одному на каждом конце. LEE имеет три троса-ловушки для фиксации вала захвата . [5] Другой LEE находится в блоке размещения полезной нагрузки ORU (POA) мобильной базовой системы. POA LEE используется для временного хранения крупных компонентов МКС. Еще один — ловкий манипулятор специального назначения (СПДМ, также известный как «Декстр» или «Канадская рука»). Шесть LEE были изготовлены и использованы в различных местах МКС. [ нужна ссылка ] .
| Серийный номер | Начальное местоположение | Текущее местоположение |
|---|---|---|
| 201 | ЛИ Б. | ПОА ЛИ |
| 202 | ЛИ А | Земля, подлежащая ремонту для наземного запаса |
| 203 | ПОА ЛИ | ЛИ А |
| 204 | Запасной хранится на ELC1 | ЛИ Б. |
| 205 | Земля, Запасная земля | Запасной хранится на внешней стороне МКС. |
| 301 | СПДМ ЛИ | СПДМ ЛИ |
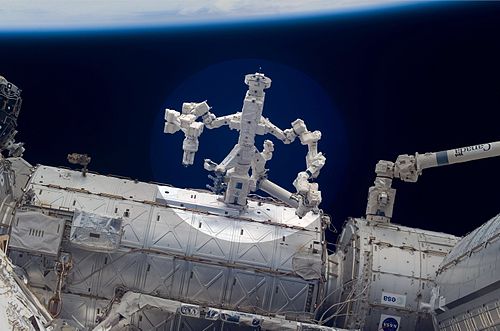
Ловкий манипулятор специального назначения
[ редактировать ]Ловкий манипулятор специального назначения, или « Декстр », представляет собой меньший по размеру двурукий робот, который можно прикрепить к Canadarm2, МКС или мобильной базовой системе. Руки и их электроинструменты способны выполнять деликатные задачи по сборке и замене орбитальных сменных блоков (ОРУ), с которыми в настоящее время работают астронавты во время выходов в открытый космос. Хотя Canadarm2 может перемещаться по станции «червячным движением», он не может ничего нести с собой, если не прикреплен Декстр. Тестирование проводилось в камерах космического моделирования Лаборатории Дэвида Флориды Канадского космического агентства в Оттаве , Онтарио. Манипулятор был запущен на станцию 11 марта 2008 года на корабле STS-123 .
Мобильная базовая система
[ редактировать ]
Базовая система мобильного удаленного обслуживания (MBS) представляет собой базовую платформу для роботизированных манипуляторов. Она была добавлена к станции во время STS-111 в июне 2002 года. Платформа расположена на вершине мобильного транспортера. [6] (установлен на STS-110 , спроектированном компанией Northrop Grumman в Карпинтерии, Калифорния ), что позволяет ему скользить на 108 метров по рельсам главной фермы станции . [7] Canadarm2 может перемещаться сам по себе, но не может одновременно нести, Dextre не может перемещаться сам по себе. MBS дает двум роботизированным рукам возможность перемещаться к рабочим площадкам по всей ферменной конструкции и по пути вставать на грейферные приспособления. Когда Canadarm2 и Dextre прикреплены к MBS, их общая масса составляет 4900 кг (10800 фунтов). [8] Как и Canadarm2, он был построен компанией MD Robotics и имеет минимальный срок службы 15 лет. [7] [9]
MBS оснащен четырьмя захватами Power Data , по одному в каждом из четырех верхних углов. Любой из них можно использовать в качестве основы для двух роботов, Canadarm2 и Dextre, а также для любой полезной нагрузки, которую они могут удерживать. MBS также имеет два места для крепления полезной нагрузки. Первый — это размещение полезной нагрузки/заменяющего орбитального блока (POA). Это устройство, которое выглядит и функционирует так же, как концевые эффекторы с защелкой Canadarm2. Его можно использовать для парковки, подачи питания и управления любой полезной нагрузкой с помощью грейфера, сохраняя при этом Canadarm2 возможность делать что-то еще. Другое место крепления — это общая система крепления MBS (MCAS). Это еще один тип системы крепления, который используется для проведения научных экспериментов. [10]
MBS также поддерживает астронавтов во время выхода в открытый космос . В нем предусмотрены места для хранения инструментов и оборудования, подставки для ног, поручни и точки крепления страховочных тросов, а также блок камеры. При необходимости астронавт даже может «оседлать» MBS, пока он движется с максимальной скоростью около 1,5 метров в минуту. [6] По обе стороны от MBS расположены средства перевода экипажа и оборудования. Эти тележки ездят по тем же рельсам, что и МБС. Астронавты управляют ими вручную во время выхода в открытый космос для транспортировки оборудования и облегчения передвижения по станции.
Усовершенствованная стрела МКС
[ редактировать ]27 мая 2011 года к концу Canadarm2 была установлена стрела длиной 15,24 метра (50 футов) с поручнями и камерами наблюдения.
 Система дистанционного манипулятора шаттла (RMS), удерживающая стрелу OBSS на STS-114
Система дистанционного манипулятора шаттла (RMS), удерживающая стрелу OBSS на STS-114 Астронавт Скотт Паразински (справа) едет на стреле OBSS, чтобы отремонтировать солнечную батарею во время STS-120.
Астронавт Скотт Паразински (справа) едет на стреле OBSS, чтобы отремонтировать солнечную батарею во время STS-120.


Другая робототехника МКС
[ редактировать ]Станция получила вторую роботизированную руку во время STS-124 , экспериментального модуля японской системы дистанционного манипулятора (JEM-RMS). JEM-RMS в основном используется для обслуживания открытого объекта JEM . Дополнительный роботизированный манипулятор, Европейский роботизированный манипулятор российского производства (ERA), был запущен вместе с многоцелевым лабораторным модулем 15 июля 2021 года.
Первоначально связанная с «Пирсом», МКС также имеет два грузовых крана «Стрела» . Один из кранов можно было продлить, чтобы дойти до конца Зари . Другой мог простираться на противоположную сторону и доходить до конца Звезды . Первый кран был собран в космосе во время STS-96 и STS-101 . Второй кран был спущен рядом с самим «Пирсом». Позже краны были перенесены в стыковочный отсек «Поиск» и модуль «Заря» .
Список кранов
[ редактировать ]| Имя | Агентство или Компания | Запуск |
|---|---|---|
| Канадарм 2 | Канадское космическое агентство | 19 апреля 2001 г. |
| Декстре | Канадское космическое агентство | 11 марта 2008 г. |
См. также
[ редактировать ]- MacDonald Dettwiler and Associates (MDA) , производители Canadarm2
- Canadarm , который использовался на орбитальных кораблях космических кораблей.
- European Robotic Arm — третий роботизированный манипулятор, установленный на МКС.
- Система дистанционного манипулятора, используемая на модуле МКС « Кибо ».
- Dextre , также известный как ловкий манипулятор специального назначения (SPDM), используемый на МКС.
- «Стрела» — кран, используемый на МКС для выполнения тех же задач, что и Мобильная система обслуживания.
Ссылки
[ редактировать ]- ^ «Тематическое исследование: MDA — канадское космическое оружие» (PDF) . АдаКор . Проверено 15 октября 2009 г.
- ^ Jump up to: а б Мишель, Звезда (31 мая 2021 г.). «Космический мусор ударил и повредил Международную космическую станцию» . Научное предупреждение . Проверено 31 мая 2021 г.
- ^ «Последовательность сборки станции Axiom — Пространство аксиом» . Пространство аксиом . Проверено 9 августа 2021 г.
- ^ «На МКС может родиться частная космическая станция – Искатель» . www.seeker.com . 25 января 2017 года . Проверено 26 сентября 2021 г.
- ^ Контрольный список выхода в открытый космос, Дополнение к полету STS-126, 2008 г., страницы 115, 117, 118.
- ^ Jump up to: а б «Самый медленный и самый быстрый поезд во Вселенной» . НАСА.
- ^ Jump up to: а б «О мобильной базовой системе» . Правительство Канады. 20 июня 2018 года . Проверено 2 января 2023 г.
- ^ Гарсия, Марк (22 октября 2018 г.). «Система мобильного обслуживания» . НАСА .
- ^ «Робот космической эры» . Обзор технологий Массачусетского технологического института . Проверено 2 января 2023 г.
- ^ «CSA – STS-111 – Мобильная базовая система – MBS Design» . Канадское космическое агентство. Архивировано из оригинала 21 сентября 2008 г. Проверено 15 марта 2008 г.
Дальнейшее чтение
[ редактировать ]- Роботизированная передача и интерфейсы для внешних полезных нагрузок МКС. 2014 г. Хорошие диаграммы SSRMS/Canadarm2,
Внешние ссылки
[ редактировать ]- Сборка МКС: Canadarm2 и мобильная система обслуживания
- Информация Канадского космического агентства о Canadarm2
- Анимация на YouTube, показывающая совместную работу мобильной базовой системы, Canadarm2 и Dextre.
- Ютуб-анимация о заражении Canadarm2 дюймовыми червями на станции
Компоненты Международной космической станции |
|---|
