Робот



Робот программируемая — это машина , особенно компьютером , способная автоматически выполнять сложную серию действий. [2] Робот может управляться внешним устройством управления, либо управление может быть встроенным. Роботы могут быть созданы так, чтобы имитировать человеческую форму , но большинство роботов — это машины, выполняющие определенные задачи, разработанные с упором на абсолютную функциональность, а не на выразительную эстетику.
Роботы могут быть автономными или полуавтономными и варьируются от гуманоидов, таких как Honda от Advanced Step in Innovative Mobility ( ASIMO ) и TOSY , играющий в пинг-понг ( TOPIO ), до промышленных роботов , медицинских операционных роботов , роботов для помощи пациентам, собак. терапевтические роботы, коллективно запрограммированные роевые роботы , беспилотные летательные аппараты, такие как General Atomics MQ-1 Predator , и даже микроскопические нанороботы . Имитируя реалистичный внешний вид или автоматизируя движения, робот может передать чувство интеллекта или мысль собственную автономные устройства . Ожидается, что в будущем будут распространяться, при этом домашняя робототехника и автономные автомобили станут одними из основных движущих сил. [3]
The branch of technology that deals with the design, construction, operation, and application of robots,[4] as well as computer systems for their control, sensory feedback, and information processing is robotics. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics. These robots have also created a newer branch of robotics: soft robotics.
From the time of ancient civilization, there have been many accounts of user-configurable automated devices and even automata resembling humans and other animals, such as animatronics, designed primarily as entertainment. As mechanical techniques developed through the Industrial age, there appeared more practical applications such as automated machines, remote-control and wireless remote-control.
The term comes from a Slavic root, robot-, with meanings associated with labor. The word 'robot' was first used to denote a fictional humanoid in a 1920 Czech-language play R.U.R. (Rossumovi Univerzální Roboti – Rossum's Universal Robots) by Karel Čapek, though it was Karel's brother Josef Čapek who was the word's true inventor.[5][6][7] Electronics evolved into the driving force of development with the advent of the first electronic autonomous robots created by William Grey Walter in Bristol, England in 1948, as well as Computer Numerical Control (CNC) machine tools in the late 1940s by John T. Parsons and Frank L. Stulen.
The first commercial, digital and programmable robot was built by George Devol in 1954 and was named the Unimate. It was sold to General Motors in 1961 where it was used to lift pieces of hot metal from die casting machines at the Inland Fisher Guide Plant in the West Trenton section of Ewing Township, New Jersey.[8]
Robots have replaced humans[9] in performing repetitive and dangerous tasks which humans prefer not to do, or are unable to do because of size limitations, or which take place in extreme environments such as outer space or the bottom of the sea. There are concerns about the increasing use of robots and their role in society. Robots are blamed for rising technological unemployment as they replace workers in increasing numbers of functions.[10] The use of robots in military combat raises ethical concerns. The possibilities of robot autonomy and potential repercussions have been addressed in fiction and may be a realistic concern in the future.
Summary


The word robot can refer to both physical robots and virtual software agents, but the latter are usually referred to as bots.[11] There is no consensus on which machines qualify as robots but there is general agreement among experts, and the public, that robots tend to possess some or all of the following abilities and functions: accept electronic programming, process data or physical perceptions electronically, operate autonomously to some degree, move around, operate physical parts of itself or physical processes, sense and manipulate their environment, and exhibit intelligent behavior, especially behavior which mimics humans or other animals.[12][13] Related to the concept of a robot is the field of synthetic biology, which studies entities whose nature is more comparable to living things than to machines.
History
The idea of automata originates in the mythologies of many cultures around the world. Engineers and inventors from ancient civilizations, including Ancient China,[14] Ancient Greece, and Ptolemaic Egypt,[15] attempted to build self-operating machines, some resembling animals and humans. Early descriptions of automata include the artificial doves of Archytas,[16] the artificial birds of Mozi and Lu Ban,[17] a "speaking" automaton by Hero of Alexandria, a washstand automaton by Philo of Byzantium, and a human automaton described in the Lie Zi.[14]
Early beginnings
Many ancient mythologies, and most modern religions include artificial people, such as the mechanical servants built by the Greek god Hephaestus[18] (Vulcan to the Romans), the clay golems of Jewish legend and clay giants of Norse legend, and Galatea, the mythical statue of Pygmalion that came to life. Since circa 400 BC, myths of Crete include Talos, a man of bronze who guarded the island from pirates.
In ancient Greece, the Greek engineer Ctesibius (c. 270 BC) "applied a knowledge of pneumatics and hydraulics to produce the first organ and water clocks with moving figures."[19]: 2 [20] In the 4th century BC, the Greek mathematician Archytas of Tarentum postulated a mechanical steam-operated bird he called "The Pigeon". Hero of Alexandria (10–70 AD), a Greek mathematician and inventor, created numerous user-configurable automated devices, and described machines powered by air pressure, steam and water.[21]
The 11th century Lokapannatti tells of how the Buddha's relics were protected by mechanical robots (bhuta vahana yanta), from the kingdom of Roma visaya (Rome); until they were disarmed by King Ashoka.[22]
In ancient China, the 3rd-century text of the Lie Zi describes an account of humanoid automata, involving a much earlier encounter between Chinese emperor King Mu of Zhou and a mechanical engineer known as Yan Shi, an 'artificer'. Yan Shi proudly presented the king with a life-size, human-shaped figure of his mechanical 'handiwork' made of leather, wood, and artificial organs.[14] There are also accounts of flying automata in the Han Fei Zi and other texts, which attributes the 5th century BC Mohist philosopher Mozi and his contemporary Lu Ban with the invention of artificial wooden birds (ma yuan) that could successfully fly.[17]

In 1066, the Chinese inventor Su Song built a water clock in the form of a tower which featured mechanical figurines which chimed the hours.[23][24][25] His mechanism had a programmable drum machine with pegs (cams) that bumped into little levers that operated percussion instruments. The drummer could be made to play different rhythms and different drum patterns by moving the pegs to different locations.[25]
Samarangana Sutradhara, a Sanskrit treatise by Bhoja (11th century), includes a chapter about the construction of mechanical contrivances (automata), including mechanical bees and birds, fountains shaped like humans and animals, and male and female dolls that refilled oil lamps, danced, played instruments, and re-enacted scenes from Hindu mythology.[26][27][28]
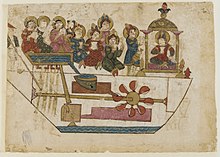
13th century Muslim scientist Ismail al-Jazari created several automated devices. He built automated moving peacocks driven by hydropower.[29] He also invented the earliest known automatic gates, which were driven by hydropower,[30] created automatic doors as part of one of his elaborate water clocks.[31] One of al-Jazari's humanoid automata was a waitress that could serve water, tea or drinks. The drink was stored in a tank with a reservoir from where the drink drips into a bucket and, after seven minutes, into a cup, after which the waitress appears out of an automatic door serving the drink.[32] Al-Jazari invented a hand washing automaton incorporating a flush mechanism now used in modern flush toilets. It features a female humanoid automaton standing by a basin filled with water. When the user pulls the lever, the water drains and the female automaton refills the basin.[19]
Mark E. Rosheim summarizes the advances in robotics made by Muslim engineers, especially al-Jazari, as follows:
Unlike the Greek designs, these Arab examples reveal an interest, not only in dramatic illusion, but in manipulating the environment for human comfort. Thus, the greatest contribution the Arabs made, besides preserving, disseminating and building on the work of the Greeks, was the concept of practical application. This was the key element that was missing in Greek robotic science.[19]: 9

In the 14th century, the coronation of Richard II of England featured an automata angel.[34]
In Renaissance Italy, Leonardo da Vinci (1452–1519) sketched plans for a humanoid robot around 1495. Da Vinci's notebooks, rediscovered in the 1950s, contained detailed drawings of a mechanical knight now known as Leonardo's robot, able to sit up, wave its arms and move its head and jaw.[35] The design was probably based on anatomical research recorded in his Vitruvian Man. It is not known whether he attempted to build it. According to Encyclopædia Britannica, Leonardo da Vinci may have been influenced by the classic automata of al-Jazari.[29]
In Japan, complex animal and human automata were built between the 17th to 19th centuries, with many described in the 18th century Karakuri zui (Illustrated Machinery, 1796). One such automaton was the karakuri ningyō, a mechanized puppet.[36] Different variations of the karakuri existed: the Butai karakuri, which were used in theatre, the Zashiki karakuri, which were small and used in homes, and the Dashi karakuri which were used in religious festivals, where the puppets were used to perform reenactments of traditional myths and legends.
In France, between 1738 and 1739, Jacques de Vaucanson exhibited several life-sized automatons: a flute player, a pipe player and a duck. The mechanical duck could flap its wings, crane its neck, and swallow food from the exhibitor's hand, and it gave the illusion of digesting its food by excreting matter stored in a hidden compartment.[37] About 30 years later in Switzerland the clockmaker Pierre Jaquet-Droz made several complex mechanical figures that could write and play music. Several of these devices still exist and work.[38]
Remote-controlled systems
Remotely operated vehicles were demonstrated in the late 19th century in the form of several types of remotely controlled torpedoes. The early 1870s saw remotely controlled torpedoes by John Ericsson (pneumatic), John Louis Lay (electric wire guided), and Victor von Scheliha (electric wire guided).[39]
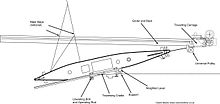
The Brennan torpedo, invented by Louis Brennan in 1877, was powered by two contra-rotating propellers that were spun by rapidly pulling out wires from drums wound inside the torpedo. Differential speed on the wires connected to the shore station allowed the torpedo to be guided to its target, making it "the world's first practical guided missile".[40] In 1897 the British inventor Ernest Wilson was granted a patent for a torpedo remotely controlled by "Hertzian" (radio) waves[41][42] and in 1898 Nikola Tesla publicly demonstrated a wireless-controlled torpedo that he hoped to sell to the US Navy.[43][44]
In 1903, the Spanish engineer Leonardo Torres Quevedo demonstrated a radio control system called "Telekino" at the Paris Academy of Sciences,[45] which he wanted to use to control an airship of his own design. He obtained some patents in other countries.[46] Unlike the previous mechanisms, which carried out actions of the 'on/off' type, Torres developed a system for controlling any mechanical or electrical device with different states of operation.[47] The transmitter was capable of sending a family of different codewords by means of a binary telegraph signal to the receiver, which was able to set up a different state of operation in the device being used, depending on the codeword. Specifically, it was able to do up to 19 different actions.[48][49]
Archibald Low, known as the "father of radio guidance systems" for his pioneering work on guided rockets and planes during the First World War. In 1917, he demonstrated a remote controlled aircraft to the Royal Flying Corps and in the same year built the first wire-guided rocket.
Early robots

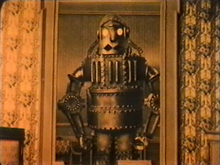
In 1928, one of the first humanoid robots, Eric, was exhibited at the annual exhibition of the Model Engineers Society in London, where it delivered a speech. Invented by W. H. Richards, the robot's frame consisted of an aluminium body of armour with eleven electromagnets and one motor powered by a twelve-volt power source. The robot could move its hands and head and could be controlled through remote control or voice control.[50] Both Eric and his "brother" George toured the world.[51]
Westinghouse Electric Corporation built Televox in 1926; it was a cardboard cutout connected to various devices which users could turn on and off. In 1939, the humanoid robot known as Elektro was debuted at the 1939 New York World's Fair.[52][53] Seven feet tall (2.1 m) and weighing 265 pounds (120.2 kg), it could walk by voice command, speak about 700 words (using a 78-rpm record player), smoke cigarettes, blow up balloons, and move its head and arms. The body consisted of a steel gear, cam and motor skeleton covered by an aluminum skin. In 1928, Japan's first robot, Gakutensoku, was designed and constructed by biologist Makoto Nishimura.
The German V-1 flying bomb was equipped with systems for automatic guidance and range control, flying on a predetermined course (which could include a 90-degree turn) and entering a terminal dive after a predetermined distance. It was reported as being a 'robot' in contemporary descriptions [54]
Modern autonomous robots
The first electronic autonomous robots with complex behaviour were created by William Grey Walter of the Burden Neurological Institute at Bristol, England in 1948 and 1949. He wanted to prove that rich connections between a small number of brain cells could give rise to very complex behaviors – essentially that the secret of how the brain worked lay in how it was wired up. His first robots, named Elmer and Elsie, were constructed between 1948 and 1949 and were often described as tortoises due to their shape and slow rate of movement. The three-wheeled tortoise robots were capable of phototaxis, by which they could find their way to a recharging station when they ran low on battery power.
Walter stressed the importance of using purely analogue electronics to simulate brain processes at a time when his contemporaries such as Alan Turing and John von Neumann were all turning towards a view of mental processes in terms of digital computation. His work inspired subsequent generations of robotics researchers such as Rodney Brooks, Hans Moravec and Mark Tilden. Modern incarnations of Walter's turtles may be found in the form of BEAM robotics.[55]
The first digitally operated and programmable robot was invented by George Devol in 1954 and was ultimately called the Unimate. This ultimately laid the foundations of the modern robotics industry.[56] Devol sold the first Unimate to General Motors in 1960, and it was installed in 1961 in a plant in Trenton, New Jersey to lift hot pieces of metal from a die casting machine and stack them.[57]
The first palletizing robot was introduced in 1963 by the Fuji Yusoki Kogyo Company.[58] In 1973, a robot with six electromechanically driven axes was patented[59][60][61] by KUKA robotics in Germany, and the programmable universal manipulation arm was invented by Victor Scheinman in 1976, and the design was sold to Unimation.
Commercial and industrial robots are now in widespread use performing jobs more cheaply or with greater accuracy and reliability than humans. They are also employed for jobs which are too dirty, dangerous or dull to be suitable for humans. Robots are widely used in manufacturing, assembly and packing, transport, earth and space exploration, surgery, weaponry, laboratory research, and mass production of consumer and industrial goods.[62]
Future development and trends
| External videos | |
|---|---|
Various techniques have emerged to develop the science of robotics and robots. One method is evolutionary robotics, in which a number of differing robots are submitted to tests. Those which perform best are used as a model to create a subsequent "generation" of robots. Another method is developmental robotics, which tracks changes and development within a single robot in the areas of problem-solving and other functions. Another new type of robot is just recently introduced which acts both as a smartphone and robot and is named RoboHon.[63]
As robots become more advanced, eventually there may be a standard computer operating system designed mainly for robots. Robot Operating System (ROS) is an open-source software set of programs being developed at Stanford University, the Massachusetts Institute of Technology, and the Technical University of Munich, Germany, among others. ROS provides ways to program a robot's navigation and limbs regardless of the specific hardware involved. It also provides high-level commands for items like image recognition and even opening doors. When ROS boots up on a robot's computer, it would obtain data on attributes such as the length and movement of robots' limbs. It would relay this data to higher-level algorithms. Microsoft is also developing a "Windows for robots" system with its Robotics Developer Studio, which has been available since 2007.[64]
Japan hopes to have full-scale commercialization of service robots by 2025. Much technological research in Japan is led by Japanese government agencies, particularly the Trade Ministry.[65]
Many future applications of robotics seem obvious to people, even though they are well beyond the capabilities of robots available at the time of the prediction.[66][67] As early as 1982 people were confident that someday robots would:[68] 1. Clean parts by removing molding flash 2. Spray paint automobiles with absolutely no human presence 3. Pack things in boxes—for example, orient and nest chocolate candies in candy boxes 4. Make electrical cable harness 5. Load trucks with boxes—a packing problem 6. Handle soft goods, such as garments and shoes 7. Shear sheep 8. Be used asprostheses 9. Cook fast food and work in other service industries 10. Work as a household robot.
Generally such predictions are overly optimistic in timescale.
New functionalities and prototypes
This section needs to be updated. (August 2021) |
In 2008, Caterpillar Inc. developed a dump truck which can drive itself without any human operator.[69] Many analysts believe that self-driving trucks may eventually revolutionize logistics.[70] By 2014, Caterpillar had a self-driving dump truck which is expected to greatly change the process of mining. In 2015, these Caterpillar trucks were actively used in mining operations in Australia by the mining company Rio Tinto Coal Australia.[71][72][73][74] Some analysts believe that within the next few decades, most trucks will be self-driving.[75]
A literate or 'reading robot' named Marge has intelligence that comes from software. She can read newspapers, find and correct misspelled words, learn about banks like Barclays, and understand that some restaurants are better places to eat than others.[76]
Baxter is a new robot introduced in 2012 which learns by guidance. A worker could teach Baxter how to perform a task by moving its hands in the desired motion and having Baxter memorize them. Extra dials, buttons, and controls are available on Baxter's arm for more precision and features. Any regular worker could program Baxter and it only takes a matter of minutes, unlike usual industrial robots that take extensive programs and coding to be used. This means Baxter needs no programming to operate. No software engineers are needed. This also means Baxter can be taught to perform multiple, more complicated tasks. Sawyer was added in 2015 for smaller, more precise tasks.[77]
Prototype cooking robots have been developed and could be programmed for autonomous, dynamic and adjustable preparation of discrete meals.[78][79]
Etymology

The word robot was introduced to the public by the Czech interwar writer Karel Čapek in his play R.U.R. (Rossum's Universal Robots), published in 1920.[6] The play begins in a factory that uses a chemical substitute for protoplasm to manufacture living, simplified people called robots. The play does not focus in detail on the technology behind the creation of these living creatures, but in their appearance they prefigure modern ideas of androids, creatures who can be mistaken for humans. These mass-produced workers are depicted as efficient but emotionless, incapable of original thinking and indifferent to self-preservation. At issue is whether the robots are being exploited and the consequences of human dependence upon commodified labor (especially after a number of specially-formulated robots achieve self-awareness and incite robots all around the world to rise up against the humans).
Karel Čapek himself did not coin the word. He wrote a short letter in reference to an etymology in the Oxford English Dictionary in which he named his brother, the painter and writer Josef Čapek, as its actual originator.[6]
In an article in the Czech journal Lidové noviny in 1933, he explained that he had originally wanted to call the creatures laboři ('workers', from Latin labor). However, he did not like the word, and sought advice from his brother Josef, who suggested roboti. The word robota means literally 'corvée, serf labor', and figuratively 'drudgery, hard work' in Czech and also (more general) 'work, labor' in many Slavic languages (e.g.: Bulgarian, Russian, Serbian, Slovak, Polish, Macedonian, Ukrainian, archaic Czech, as well as robot in Hungarian). Traditionally the robota (Hungarian robot) was the work period a serf (corvée) had to give for his lord, typically six months of the year. The origin of the word is the Old Church Slavonic rabota 'servitude' ('work' in contemporary Bulgarian, Macedonian and Russian), which in turn comes from the Proto-Indo-European root *orbh-. Robot is cognate with the German Arbeit 'work'.[80][81]
English pronunciation of the word has evolved relatively quickly since its introduction. In the U.S. during the late 1930s to early 1940s it was pronounced /ˈroʊboʊt/.[82][better source needed] By the late 1950s to early 1960s, some were pronouncing it /ˈroʊbət/, while others used /ˈroʊbɒt/[83] By the 1970s, its current pronunciation /ˈroʊbɒt/ had become predominant.
The word robotics, used to describe this field of study,[4] was coined by the science fiction writer Isaac Asimov. Asimov created the Three Laws of Robotics which are a recurring theme in his books. These have since been used by many others to define laws used in fiction. (The three laws are pure fiction, and no technology yet created has the ability to understand or follow them, and in fact most robots serve military purposes, which run quite contrary to the first law and often the third law. "People think about Asimov's laws, but they were set up to point out how a simple ethical system doesn't work. If you read the short stories, every single one is about a failure, and they are totally impractical," said Dr. Joanna Bryson of the University of Bath.[84])
Modern robots

Mobile robot
Mobile robots[85] have the capability to move around in their environment and are not fixed to one physical location. An example of a mobile robot that is in common use today is the automated guided vehicle or automatic guided vehicle (AGV). An AGV is a mobile robot that follows markers or wires in the floor, or uses vision or lasers.[86] AGVs are discussed later in this article.
Mobile robots are also found in industry, military and security environments.[87] They also appear as consumer products, for entertainment or to perform certain tasks like vacuum cleaning. Mobile robots are the focus of a great deal of current research and almost every major university has one or more labs that focus on mobile robot research.[88]
Mobile robots are usually used in tightly controlled environments such as on assembly lines because they have difficulty responding to unexpected interference. Because of this most humans rarely encounter robots. However domestic robots for cleaning and maintenance are increasingly common in and around homes in developed countries. Robots can also be found in military applications.[89]
Industrial robots (manipulating)

Industrial robots usually consist of a jointed arm (multi-linked manipulator) and an end effector that is attached to a fixed surface. One of the most common type of end effector is a gripper assembly.
The International Organization for Standardization gives a definition of a manipulating industrial robot in ISO 8373:
"an automatically controlled, reprogrammable, multipurpose, manipulator programmable in three or more axes, which may be either fixed in place or mobile for use in industrial automation applications."[90]
This definition is used by the International Federation of Robotics, the European Robotics Research Network (EURON) and many national standards committees.[91]
Service robot
Most commonly industrial robots are fixed robotic arms and manipulators used primarily for production and distribution of goods. The term "service robot" is less well-defined. The International Federation of Robotics has proposed a tentative definition, "A service robot is a robot which operates semi- or fully autonomously to perform services useful to the well-being of humans and equipment, excluding manufacturing operations."[92]
Educational (interactive) robots
Robots are used as educational assistants to teachers. From the 1980s, robots such as turtles were used in schools and programmed using the Logo language.[93][94]
There are robot kits like Lego Mindstorms, BIOLOID, OLLO from ROBOTIS, or BotBrain Educational Robots can help children to learn about mathematics, physics, programming, and electronics. Robotics have also been introduced into the lives of elementary and high school students in the form of robot competitions with the company FIRST (For Inspiration and Recognition of Science and Technology). The organization is the foundation for the FIRST Robotics Competition, FIRST Tech Challenge, FIRST Lego League Challenge and FIRST Lego League Explore competitions.
There have also been robots such as the teaching computer, Leachim (1974).[95] Leachim was an early example of speech synthesis using the Diphone synthesis method. 2-XL (1976) was a robot shaped game / teaching toy based on branching between audible tracks on an 8-track tape player, both invented by Michael J. Freeman.[96] Later, the 8-track was upgraded to tape cassettes and then to digital.
Modular robot
Modular robots are a new breed of robots that are designed to increase the use of robots by modularizing their architecture.[97] The functionality and effectiveness of a modular robot is easier to increase compared to conventional robots. These robots are composed of a single type of identical, several different identical module types, or similarly shaped modules, which vary in size. Their architectural structure allows hyper-redundancy for modular robots, as they can be designed with more than 8 degrees of freedom (DOF). Creating the programming, inverse kinematics and dynamics for modular robots is more complex than with traditional robots. Modular robots may be composed of L-shaped modules, cubic modules, and U and H-shaped modules. ANAT technology, an early modular robotic technology patented by Robotics Design Inc., allows the creation of modular robots from U- and H-shaped modules that connect in a chain, and are used to form heterogeneous and homogenous modular robot systems. These "ANAT robots" can be designed with "n" DOF as each module is a complete motorized robotic system that folds relatively to the modules connected before and after it in its chain, and therefore a single module allows one degree of freedom. The more modules that are connected to one another, the more degrees of freedom it will have. L-shaped modules can also be designed in a chain, and must become increasingly smaller as the size of the chain increases, as payloads attached to the end of the chain place a greater strain on modules that are further from the base. ANAT H-shaped modules do not suffer from this problem, as their design allows a modular robot to distribute pressure and impacts evenly amongst other attached modules, and therefore payload-carrying capacity does not decrease as the length of the arm increases. Modular robots can be manually or self-reconfigured to form a different robot, that may perform different applications. Because modular robots of the same architecture type are composed of modules that compose different modular robots, a snake-arm robot can combine with another to form a dual or quadra-arm robot, or can split into several mobile robots, and mobile robots can split into multiple smaller ones, or combine with others into a larger or different one. This allows a single modular robot the ability to be fully specialized in a single task, as well as the capacity to be specialized to perform multiple different tasks.
Modular robotic technology is currently being applied in hybrid transportation,[98] industrial automation,[99] duct cleaning[100] and handling. Many research centres and universities have also studied this technology, and have developed prototypes.
Collaborative robots
A collaborative robot or cobot is a robot that can safely and effectively interact with human workers while performing simple industrial tasks. However, end-effectors and other environmental conditions may create hazards, and as such risk assessments should be done before using any industrial motion-control application.[101]
The collaborative robots most widely used in industries today are manufactured by Universal Robots in Denmark.[102]
Rethink Robotics—founded by Rodney Brooks, previously with iRobot—introduced Baxter in September 2012; as an industrial robot designed to safely interact with neighboring human workers, and be programmable for performing simple tasks.[103] Baxters stop if they detect a human in the way of their robotic arms and have prominent off switches. Intended for sale to small businesses, they are promoted as the robotic analogue of the personal computer.[104] As of May 2014[update], 190 companies in the US have bought Baxters and they are being used commercially in the UK.[10]
Robots in society

Roughly half of all the robots in the world are in Asia, 32% in Europe, and 16% in North America, 1% in Australasia and 1% in Africa.[107] 40% of all the robots in the world are in Japan,[108] making Japan the country with the highest number of robots.
Autonomy and ethical questions

As robots have become more advanced and sophisticated, experts and academics have increasingly explored the questions of what ethics might govern robots' behavior,[110][111] and whether robots might be able to claim any kind of social, cultural, ethical or legal rights.[112] One scientific team has said that it was possible that a robot brain would exist by 2019.[113] Others predict robot intelligence breakthroughs by 2050.[114] Recent advances have made robotic behavior more sophisticated.[115] The social impact of intelligent robots is subject of a 2010 documentary film called Plug & Pray.[116]
Vernor Vinge has suggested that a moment may come when computers and robots are smarter than humans. He calls this "the Singularity".[117] He suggests that it may be somewhat or possibly very dangerous for humans.[118] This is discussed by a philosophy called Singularitarianism.
In 2009, experts attended a conference hosted by the Association for the Advancement of Artificial Intelligence (AAAI) to discuss whether computers and robots might be able to acquire any autonomy, and how much these abilities might pose a threat or hazard. They noted that some robots have acquired various forms of semi-autonomy, including being able to find power sources on their own and being able to independently choose targets to attack with weapons. They also noted that some computer viruses can evade elimination and have achieved "cockroach intelligence." They noted that self-awareness as depicted in science-fiction is probably unlikely, but that there were other potential hazards and pitfalls.[117] Various media sources and scientific groups have noted separate trends in differing areas which might together result in greater robotic functionalities and autonomy, and which pose some inherent concerns.[119][120][121]
Military robots
Some experts and academics have questioned the use of robots for military combat, especially when such robots are given some degree of autonomous functions.[122] There are also concerns about technology which might allow some armed robots to be controlled mainly by other robots.[123] The US Navy has funded a report which indicates that, as military robots become more complex, there should be greater attention to implications of their ability to make autonomous decisions.[124][125] One researcher states that autonomous robots might be more humane, as they could make decisions more effectively. However, other experts question this.[126]
One robot in particular, the EATR, has generated public concerns[127] over its fuel source, as it can continually refuel itself using organic substances.[128] Although the engine for the EATR is designed to run on biomass and vegetation[129] specifically selected by its sensors, which it can find on battlefields or other local environments, the project has stated that chicken fat can also be used.[130]
Manuel De Landa has noted that "smart missiles" and autonomous bombs equipped with artificial perception can be considered robots, as they make some of their decisions autonomously. He believes this represents an important and dangerous trend in which humans are handing over important decisions to machines.[131]
Relationship to unemployment
For centuries, people have predicted that machines would make workers obsolete and increase unemployment, although the causes of unemployment are usually thought to be due to social policy.[132][133][134]
A recent example of human replacement involves Taiwanese technology company Foxconn who, in July 2011, announced a three-year plan to replace workers with more robots. At present the company uses ten thousand robots but will increase them to a million robots over a three-year period.[135]
Lawyers have speculated that an increased prevalence of robots in the workplace could lead to the need to improve redundancy laws.[136]
Kevin J. Delaney said "Robots are taking human jobs. But Bill Gates believes that governments should tax companies' use of them, as a way to at least temporarily slow the spread of automation and to fund other types of employment."[137] The robot tax would also help pay a guaranteed living wage to the displaced workers.
The World Bank's World Development Report 2019 puts forth evidence showing that while automation displaces workers, technological innovation creates more new industries and jobs on balance.[138]
Contemporary uses

At present, there are two main types of robots, based on their use: general-purpose autonomous robots and dedicated robots.
Robots can be classified by their specificity of purpose. A robot might be designed to perform one particular task extremely well, or a range of tasks less well. All robots by their nature can be re-programmed to behave differently, but some are limited by their physical form. For example, a factory robot arm can perform jobs such as cutting, welding, gluing, or acting as a fairground ride, while a pick-and-place robot can only populate printed circuit boards.
General-purpose autonomous robots
General-purpose autonomous robots can perform a variety of functions independently. General-purpose autonomous robots typically can navigate independently in known spaces, handle their own re-charging needs, interface with electronic doors and elevators and perform other basic tasks. Like computers, general-purpose robots can link with networks, software and accessories that increase their usefulness. They may recognize people or objects, talk, provide companionship, monitor environmental quality, respond to alarms, pick up supplies and perform other useful tasks. General-purpose robots may perform a variety of functions simultaneously or they may take on different roles at different times of day. Some such robots try to mimic human beings and may even resemble people in appearance; this type of robot is called a humanoid robot. Humanoid robots are still in a very limited stage, as no humanoid robot can, as of yet, actually navigate around a room that it has never been in.[139] Thus, humanoid robots are really quite limited, despite their intelligent behaviors in their well-known environments.
Factory robots
Car production
Over the last three decades, automobile factories have become dominated by robots. A typical factory contains hundreds of industrial robots working on fully automated production lines, with one robot for every ten human workers. On an automated production line, a vehicle chassis on a conveyor is welded, glued, painted and finally assembled at a sequence of robot stations.
Packaging
Industrial robots are also used extensively for palletizing and packaging of manufactured goods, for example for rapidly taking drink cartons from the end of a conveyor belt and placing them into boxes, or for loading and unloading machining centers.
Electronics
Mass-produced printed circuit boards (PCBs) are almost exclusively manufactured by pick-and-place robots, typically with SCARA manipulators, which remove tiny electronic components from strips or trays, and place them on to PCBs with great accuracy.[140] Such robots can place hundreds of thousands of components per hour, far out-performing a human in speed, accuracy, and reliability.[141]
Automated guided vehicles (AGVs)

Mobile robots, following markers or wires in the floor, or using vision[86] or lasers, are used to transport goods around large facilities, such as warehouses, container ports, or hospitals.[142]
Early AGV-style robots
Limited to tasks that could be accurately defined and had to be performed the same way every time. Very little feedback or intelligence was required, and the robots needed only the most basic exteroceptors (sensors). The limitations of these AGVs are that their paths are not easily altered and they cannot alter their paths if obstacles block them. If one AGV breaks down, it may stop the entire operation.
Interim AGV technologies
Developed to deploy triangulation from beacons or bar code grids for scanning on the floor or ceiling. In most factories, triangulation systems tend to require moderate to high maintenance, such as daily cleaning of all beacons or bar codes. Also, if a tall pallet or large vehicle blocks beacons or a bar code is marred, AGVs may become lost. Often such AGVs are designed to be used in human-free environments.
Intelligent AGVs (i-AGVs)
Such as SmartLoader,[143] SpeciMinder,[144] ADAM,[145] Tug[146] Eskorta,[147] and MT 400 with Motivity[148] are designed for people-friendly workspaces. They navigate by recognizing natural features. 3D scanners or other means of sensing the environment in two or three dimensions help to eliminate cumulative errors in dead-reckoning calculations of the AGV's current position. Some AGVs can create maps of their environment using scanning lasers with simultaneous localization and mapping (SLAM) and use those maps to navigate in real time with other path planning and obstacle avoidance algorithms. They are able to operate in complex environments and perform non-repetitive and non-sequential tasks such as transporting photomasks in a semiconductor lab, specimens in hospitals and goods in warehouses. For dynamic areas, such as warehouses full of pallets, AGVs require additional strategies using three-dimensional sensors such as time-of-flight or stereovision cameras.
Dirty, dangerous, dull, or inaccessible tasks
There are many jobs that humans would rather leave to robots. The job may be boring, such as domestic cleaning or sports field line marking, or dangerous, such as exploring inside a volcano.[149] Other jobs are physically inaccessible, such as exploring another planet,[150] cleaning the inside of a long pipe, or performing laparoscopic surgery.[151]
Space probes
Almost every unmanned space probe ever launched was a robot.[152][153] Some were launched in the 1960s with very limited abilities, but their ability to fly and land (in the case of Luna 9) is an indication of their status as a robot. This includes the Voyager probes and the Galileo probes, among others.
Telerobots

Teleoperated robots, or telerobots, are devices remotely operated from a distance by a human operator rather than following a predetermined sequence of movements, but which has semi-autonomous behaviour. They are used when a human cannot be present on site to perform a job because it is dangerous, far away, or inaccessible. The robot may be in another room or another country, or may be on a very different scale to the operator. For instance, a laparoscopic surgery robot allows the surgeon to work inside a human patient on a relatively small scale compared to open surgery, significantly shortening recovery time.[151] They can also be used to avoid exposing workers to the hazardous and tight spaces such as in duct cleaning. When disabling a bomb, the operator sends a small robot to disable it. Several authors have been using a device called the Longpen to sign books remotely.[154] Teleoperated robot aircraft, like the Predator Unmanned Aerial Vehicle, are increasingly being used by the military. These pilotless drones can search terrain and fire on targets.[155][156] Hundreds of robots such as iRobot's Packbot and the Foster-Miller TALON are being used in Iraq and Afghanistan by the U.S. military to defuse roadside bombs or improvised explosive devices (IEDs) in an activity known as explosive ordnance disposal (EOD).[157]
Automated fruit harvesting machines
Robots are used to automate picking fruit on orchards at a cost lower than that of human pickers.
Domestic robots

Domestic robots are simple robots dedicated to a single task work in home use. They are used in simple but often disliked jobs, such as vacuum cleaning, floor washing, and lawn mowing. An example of a domestic robot is a Roomba.
Military robots
Military robots include the SWORDS robot which is currently used in ground-based combat. It can use a variety of weapons and there is some discussion of giving it some degree of autonomy in battleground situations.[158][159][160]
Unmanned combat air vehicles (UCAVs), which are an upgraded form of UAVs, can do a wide variety of missions, including combat. UCAVs are being designed such as the BAE Systems Mantis which would have the ability to fly themselves, to pick their own course and target, and to make most decisions on their own.[161] The BAE Taranis is a UCAV built by Great Britain which can fly across continents without a pilot and has new means to avoid detection.[162] Flight trials are expected to begin in 2011.[163]
AAAI . глубоко изучила эту тему [110] и ее президент заказал исследование для изучения этого вопроса. [164]
Некоторые полагают, что необходимо создать « Дружественный ИИ », а это означает, что достижения, которые уже происходят в области ИИ, должны также включать усилия по созданию ИИ по своей сути дружелюбным и гуманным. [165] Сообщается, что несколько таких мер уже существуют в странах с большим количеством роботов, таких как Япония и Южная Корея. [166] начав принимать правила, требующие, чтобы роботы были оснащены системами безопасности, и, возможно, сводом «законов», подобных трем законам робототехники Азимова . [167] [168] Официальный отчет был опубликован в 2009 году Комитетом по политике в области робототехники при правительстве Японии. [169] Китайские официальные лица и исследователи опубликовали отчет, предлагающий набор этических правил и набор новых юридических руководящих принципов, получивших название «Правовые исследования роботов». [170] Была выражена некоторая обеспокоенность по поводу возможного появления роботов, говорящих очевидную ложь. [171]
Горные роботы
Горные роботы предназначены для решения ряда проблем, с которыми в настоящее время сталкивается горнодобывающая промышленность, включая нехватку квалифицированных кадров, повышение производительности за счет снижения содержания руды и достижение экологических целей. Из-за опасного характера горных работ, в частности подземных горных работ , в последнее время значительно возросло распространение автономных, полуавтономных и телеуправляемых роботов. Ряд производителей транспортных средств предоставляют автономные поезда, грузовики и погрузчики , которые будут загружать материал, транспортировать его по руднику к месту назначения и разгружать, не требуя вмешательства человека. Одна из крупнейших в мире горнодобывающих корпораций Rio Tinto недавно расширила свой парк автономных грузовиков до крупнейшего в мире, состоящего из 150 автономных грузовиков Komatsu , работающих в Западной Австралии . [172] Аналогичным образом, BHP объявила о расширении своего парка автономных буровых установок до 21 крупнейшей в мире автономной буровой установки Atlas Copco . [173]
Буровые, очистные и камнедробильные машины теперь также доступны в виде автономных роботов. [174] Система управления буровой установкой Atlas Copco может автономно выполнять план бурения на буровой установке , перемещая буровую установку в нужное положение с помощью GPS, настраивая буровую установку и буря до заданной глубины. [175] Аналогичным образом, система Transmin Rocklogic может автоматически планировать путь для размещения камнелома в выбранном пункте назначения. [176] Эти системы значительно повышают безопасность и эффективность горнодобывающих работ.
Здравоохранение
Роботы в здравоохранении выполняют две основные функции. Те, которые помогают отдельному человеку, например, страдающему таким заболеванием, как рассеянный склероз, и те, которые помогают общим системам, таким как аптеки и больницы.
Домашняя автоматизация для пожилых людей и инвалидов
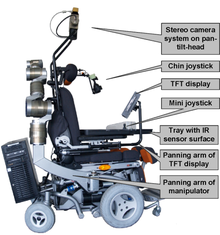
Роботы, используемые в домашней автоматизации, со временем превратились из простых базовых роботов-помощников, таких как Handy 1 , [177] вплоть до полуавтономных роботов, таких как FRIEND , которые могут помогать пожилым людям и людям с ограниченными возможностями выполнять обычные задачи.
Население стареет во многих странах, особенно в Японии, а это означает, что растет число пожилых людей, о которых нужно заботиться, но относительно меньше молодых людей, о которых нужно заботиться. [178] [179] Люди являются лучшими помощниками по уходу, но там, где они недоступны, постепенно внедряются роботы. [180]
FRIEND — это полуавтономный робот, предназначенный для помощи людям с ограниченными возможностями и пожилым людям в их повседневной жизни, например, в приготовлении и подаче еды. FRIEND позволяет пациентам , страдающим параличом нижних конечностей , мышечными заболеваниями или серьезными параличами (в результате инсульта и т. д.), выполнять задачи без помощи других людей, таких как терапевты или медперсонал.
Аптеки
Этот раздел нуждается в дополнительных цитатах для проверки . ( Июль 2009 г. ) |
Script Pro производит робота, призванного помогать аптекам выписывать рецепты, состоящие из твердых веществ для перорального приема или лекарств в форме таблеток. [181] [ нужен лучший источник ] Фармацевт или фармацевтический техник вводит информацию о рецепте в свою информационную систему. Система, определив, есть ли препарат в роботе, отправит информацию роботу для заполнения. Робот имеет 3 флакона разного размера, которые можно заполнить в зависимости от размера таблетки. Техник-робототехник, пользователь или фармацевт определяет необходимый размер флакона на основе планшета, когда робот находится на складе. После наполнения флакона он подается на конвейерную ленту, которая доставляет его к держателю, который вращает флакон и прикрепляет этикетку для пациента. После этого он устанавливается на другой конвейер, который доставляет флакон с лекарством пациента в слот, обозначенный именем пациента на светодиодном индикаторе. Затем фармацевт или технический специалист проверяет содержимое флакона, чтобы убедиться, что это препарат, подходящий конкретному пациенту, а затем запечатывает флаконы и отправляет их забрать.
Robot RX от McKesson — еще один роботизированный продукт в сфере здравоохранения, который помогает аптекам ежедневно выдавать тысячи лекарств практически без ошибок. [182] Робот может иметь ширину десять футов и длину тридцать футов и может вмещать сотни различных видов лекарств и тысячи доз. Аптека экономит много ресурсов, таких как сотрудники, которые в противном случае были бы недоступны в отрасли с дефицитом ресурсов. Он использует электромеханическую головку в сочетании с пневматической системой для захвата каждой дозы и доставки ее либо к месту хранения, либо к месту выдачи. Головка движется по одной оси и поворачивается на 180 градусов, вытягивая лекарства. Во время этого процесса он использует технологию штрих-кода , чтобы убедиться, что он извлекает правильный препарат. Затем он доставляет лекарство в контейнер для конкретного пациента на конвейерной ленте. Как только контейнер заполняется всеми лекарствами, необходимыми конкретному пациенту и которые есть в наличии у робота, контейнер освобождается и возвращается на конвейерную ленту к технику, ожидающему загрузки его в тележку для доставки на этаж.
Исследовательские роботы
разрабатывается множество новых типов роботов В то время как большинство роботов сегодня установлены на заводах или в домах, выполняя трудовые или спасательные работы, в лабораториях по всему миру . Большая часть исследований в области робототехники сосредоточена не на конкретных промышленных задачах, а на исследованиях новых типов роботов, альтернативных способов мышления или проектирования роботов, а также новых способов их производства. Ожидается, что эти новые типы роботов смогут решать проблемы реального мира, когда они наконец будут реализованы. [ нужна ссылка ]
Бионические и биомиметические роботы
Один из подходов к созданию роботов — создать их на основе животных. BionicKangaroo был разработан и создан путем изучения и применения физиологии и методов передвижения кенгуру.
Нанороботы
Наноробототехника — это новая технологическая область создания машин или роботов, компоненты которых имеют размер микроскопического масштаба нанометра или близкий к нему (10 −9 метров). Также известные как «наноботы» или «наниты», они будут построены из молекулярных машин . До сих пор исследователи в основном создавали только части этих сложных систем, такие как подшипники, датчики и синтетические молекулярные двигатели , но были созданы и функционирующие роботы, такие как участники конкурса Nanobot Robocup. [183] Исследователи также надеются, что смогут создавать целых роботов размером с вирусы или бактерии, которые смогут выполнять задачи в крошечных масштабах. Возможные применения включают микрохирургию (на уровне отдельных клеток ), туман , [184] производство, вооружение и уборка. [185] Некоторые люди предполагают, что если бы существовали нанороботы, которые могли бы размножаться, земля превратилась бы в « серую слизь », в то время как другие утверждают, что этот гипотетический результат — нонсенс. [186] [187]
Реконфигурируемые роботы
Несколько исследователей исследовали возможность создания роботов, которые могут изменять свою физическую форму для выполнения конкретной задачи. [188] как вымышленный Т-1000 . Однако настоящие роботы далеко не так сложны и в основном состоят из небольшого количества блоков кубической формы, которые могут перемещаться относительно своих соседей. Алгоритмы были разработаны на случай, если такие роботы станут реальностью. [189]
Роботизированные операторы мобильных лабораторий
В июле 2020 года ученые сообщили о разработке мобильного робота-химика и продемонстрировали, что он может помочь в экспериментальных поисках. По словам ученых, их стратегия заключалась в автоматизации исследователя, а не инструментов, что освобождало время исследователям-людям для творческого мышления, и позволяло идентифицировать смеси фотокатализаторов для производства водорода из воды, которые были в шесть раз более активными, чем первоначальные составы. Модульный робот может управлять лабораторными приборами, работать практически круглосуточно и автономно принимать решения о своих дальнейших действиях в зависимости от результатов экспериментов. [190] [191]
Мягкотелые роботы
Роботы с силиконовыми телами и гибкими приводами ( воздушные мышцы , электроактивные полимеры и феррожидкости ) выглядят и ощущаются иначе, чем роботы с жестким скелетом, и могут вести себя по-разному. [192] Мягкие, гибкие (а иногда даже мягкие) роботы часто проектируются так, чтобы имитировать биомеханику животных и других существ, встречающихся в природе, что приводит к новым применениям в медицине, уходе, поиске и спасении, обработке и производстве пищевых продуктов, а также научных исследованиях. . [193] [194]
Роевые роботы
Вдохновленные колониями насекомых, таких как муравьи и пчелы , исследователи моделируют поведение стаи тысяч крошечных роботов, которые вместе выполняют полезную задачу, например, находят что-то спрятанное, убирают или шпионят. Каждый робот довольно прост, но возникающее поведение роя более сложное. Всю совокупность роботов можно рассматривать как одну распределенную систему, точно так же, как колонию муравьев можно считать суперорганизмом , обладающим роевым интеллектом . К крупнейшим созданным на данный момент роям относятся рой iRobot и проект SRI/MobileRobots CentiBots. [195] и группа проектов микророботов с открытым исходным кодом, которые используются для исследования коллективного поведения. [196] [197] Рои также более устойчивы к сбоям. В то время как один большой робот может потерпеть неудачу и разрушить миссию, рой может продолжить работу, даже если несколько роботов потерпят неудачу. Это может сделать их привлекательными для миссий по исследованию космоса, где неудача обычно обходится чрезвычайно дорого. [198]
Роботы с тактильным интерфейсом
Робототехника также находит применение при разработке интерфейсов виртуальной реальности . Специализированные роботы широко используются в исследовательском сообществе, занимающемся тактильными ощущениями . Эти роботы, называемые «тактильными интерфейсами», позволяют пользователю сенсорно взаимодействовать с реальной и виртуальной средой. Роботизированные силы позволяют моделировать механические свойства «виртуальных» объектов, которые пользователи могут ощущать посредством осязания . [199]
Современное искусство и скульптура
Роботы используются современными художниками для создания произведений, включающих механическую автоматизацию. Существует множество ветвей роботизированного искусства, одной из которых является искусство роботизированной инсталляции , тип искусства инсталляции , который запрограммирован реагировать на взаимодействия со зрителем с помощью компьютеров, датчиков и исполнительных механизмов. Таким образом, будущее поведение таких инсталляций может быть изменено вкладом художника или участника, что отличает эти произведения искусства от других типов кинетического искусства .
Le Grand Palais в Париже организовал выставку «Художники и роботы», на которой были представлены произведения более сорока художников, созданные с помощью роботов в 2018 году. [200]
Роботы в популярной культуре

Литература
Роботизированные персонажи, андроиды (искусственные мужчины/женщины) или гиноиды (искусственные женщины) и киборги (также « бионические мужчины/женщины» или люди со значительными механическими усовершенствованиями) стали основными продуктами научной фантастики.
Первое упоминание в западной литературе механических слуг появляется в Гомера » «Илиаде . В XVIII книге Гефест , бог огня, создает новые доспехи для героя Ахилла с помощью роботов. [201] Согласно переводу Рье , «Золотые служанки поспешили на помощь своему хозяину. Они выглядели как настоящие женщины и могли не только говорить и пользоваться своими конечностями, но были наделены разумом и обучены ручному труду бессмертными богами». Для их описания не используются слова «робот» или «андроид», но, тем не менее, они представляют собой механические устройства, похожие на людей. «Слово «Робот» впервые использовалось в пьесе Карела Чапека RUR (Универсальные роботы Россума) (написанной в 1920 году)». Писатель Карел Чапек родился в Чехословакии (Чехия).
Возможно, самым плодовитым автором двадцатого века был Айзек Азимов (1920–1992). [202] опубликовавший более пятисот книг. [203] Азимова, вероятно, больше всего помнят за его научно-фантастические рассказы, особенно о роботах, где он поместил роботов и их взаимодействие с обществом в центр многих своих работ. [204] [205] Азимов тщательно рассмотрел проблему идеального набора инструкций, которые можно было бы давать роботам, чтобы снизить риск для людей, и пришел к своим трем законам робототехники : робот не может причинить вред человеку или своим бездействием позволить человеку прийти. причинить вред; робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону; и робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону. [206] Они были представлены в его рассказе 1942 года «Обход», хотя и предвещались в нескольких более ранних рассказах. Позже Азимов добавил Нулевой закон: «Робот не может причинить вред человечеству или своим бездействием допустить, чтобы человечеству был причинен вред»; остальные законы последовательно изменяются, чтобы признать это.
Согласно Оксфордскому словарю английского языка, первый отрывок рассказа Азимова « Лжец! » (1941), в котором упоминается Первый закон, является самым ранним зарегистрированным использованием слова «робототехника» . Азимов изначально не знал об этом; он предполагал, что это слово уже существовало по аналогии с механикой, гидравликой и другими подобными терминами, обозначающими отрасли прикладного знания. [207]
Соревнования роботов
Роботы используются во многих соревновательных мероприятиях. Соревнования по боям роботов были популяризированы телевизионными шоу, такими как Robot Wars и BattleBots , в которых участвуют в основном дистанционно управляемые «роботы», которые соревнуются друг с другом напрямую, используя различное вооружение. Существуют также любительские лиги боевых роботов, действующие по всему миру за пределами телевизионных мероприятий. Мероприятия Micromouse , в которых автономные роботы соревнуются в преодолении лабиринтов или других полос препятствий, также проводятся на международном уровне.
Соревнования роботов также часто используются в образовательных учреждениях, чтобы познакомить детей с концепцией робототехники, например, ПЕРВЫЕ соревнования по робототехнике в США.
Фильмы
Роботы появляются во многих фильмах. Большинство роботов в кино вымышлены. Двумя наиболее известными являются R2-D2 и C-3PO из франшизы «Звездные войны» .
Секс-роботы
Концепция гуманоидных секс-роботов привлекла внимание общественности и вызвала споры относительно их предполагаемых преимуществ и потенциального воздействия на общество. Оппоненты утверждают, что внедрение таких устройств было бы социально вредным и унизительным для женщин и детей. [208] в то время как сторонники ссылаются на их потенциальную терапевтическую пользу, особенно в помощи людям с деменцией или депрессией . [209]
Проблемы, изображенные в популярной культуре
Страхи и опасения по поводу роботов неоднократно выражались в самых разных книгах и фильмах. Общей темой является развитие высшей расы сознательных и высокоинтеллектуальных роботов, стремящихся захватить или уничтожить человеческую расу. «Франкенштейн» (1818), который часто называют первым научно-фантастическим романом, стал синонимом темы робота или андроида, превосходящего своего создателя.
Другие работы на подобные темы включают «Механический человек» , «Терминатор» , «Беглец » , «Робокоп» , « Репликаторы в «Звездных вратах » , «Сайлоны в «Звездном крейсере Галактика» , «Киберлюди и далековы в «Докторе Кто» , «Матрица» , «Энтиран» и «Я, робот» . Некоторые вымышленные роботы запрограммированы убивать и разрушать; другие обретают сверхчеловеческий интеллект и способности, модернизируя собственное программное и аппаратное обеспечение. Примерами популярных СМИ, где робот становится злом, являются «2001: Космическая одиссея» , «Красная планета» и «Энтиран» .
Игра Horizon Zero Dawn 2017 года исследует темы робототехники в войне, этики роботов и проблемы управления ИИ , а также положительное или отрицательное влияние, которое такие технологии могут оказать на окружающую среду.
Другая распространенная тема — это реакция, иногда называемая « жуткой долиной », беспокойства и даже отвращения при виде роботов, которые слишком точно имитируют людей. [109]
Совсем недавно вымышленные изображения роботов с искусственным интеллектом в таких фильмах, как «Искусственный интеллект ИИ» и «Из машины» , а также в телеадаптации «Мира Дикого Запада» 2016 года вызвали симпатию аудитории к самим роботам.
См. также
Конкретные концепции робототехники
- Передвижение робота
- Одновременная локализация и картографирование
- Тактильный датчик
- Телеоперация
- Зловещая долина
- машина фон Неймана
- Проблема с роботом-будильником
- Нейроморфная инженерия
Методы и категории робототехники
- Когнитивная робототехника
- Робот-компаньон
- Домашний робот
- Эпигенетическая робототехника
- Эволюционная робототехника
- Гуманоидный робот
- Автономный робот
- Роевая робототехника
- Микроботика
- Управление роботом
Конкретные роботы и устройства
- АЙБО
- Автономный дрон-корабль космодрома
- Беспилотный автомобиль
- Дружественная робототехника
- Семья Лели Юнона
- Робот для обработки жидкостей
- Паро (робот)
- ПатрульБот
- РобоБи
- я становлюсь сильнее
- Магазин приложений для роботов
Дальнейшее чтение
- Аль-Аршани, Сара (29 ноября 2021 г.). «Исследователи первого в мире живого робота нашли способ заставить его воспроизводиться, придав ему форму Pac-Man» . Бизнес-инсайдер .
- Посмотрите наброски этого гуманоидного робота-художника с глазу на глаз (CNN, Видео, 2019)
- Марголиус, Иван. «Пражский робот», Информационный бюллетень «Друзья чешского наследия» №. 17, осень 2017 г., стр. 3–6. https://czechfriends.net/images/RobotsMargoliusJul2017.pdf.
- Глейзер, Хорст Альберт и Россбах, Сабина: Искусственный человек, Франкфурт / М., Берн, Нью-Йорк, 2011 «Трагическая история».
- Гуткинд, Л . (2006). Почти человек: заставить роботов думать . Нью-Йорк: WW Norton & Company, Inc.
- Крейг, Джей-Джей (2005). Введение в робототехнику , Пирсон Прентис Холл. Река Аппер-Сэдл, штат Нью-Джерси.
- Цай, Л.В. (1999). Анализ роботов . Уайли. Нью-Йорк.
- Сотбис Нью-Йорк. Коллекция жестяных игрушечных роботов Мэтта Уайза (1996)
- ДеЛанда, Мануэль . Война в эпоху интеллектуальных машин . 1991. Поворот. Нью-Йорк.
- Нидхэм, Джозеф (1986). Наука и цивилизация в Китае : Том 2 . Тайбэй: Caves Books Ltd.
- Чейни, Маргарет [1989:123] (1981). Тесла, Человек вне времени . Дорсет Пресс. Нью-Йорк. ISBN 0-88029-419-1
- Чапек, Карел (1920). руб. , Авентинум, Прага.
- Серия статей TechCast, Джейсон Рупински и Ричард Микс, «Отношение общественности к Android: пол роботов, задачи и цены»
Ссылки
- ^ «Четвероногий робот «Гепард» установил новый рекорд скорости» . Рейтер. 6 марта 2012 года. Архивировано из оригинала 22 октября 2013 года . Проверено 5 октября 2013 г.
- ^ Определение слова «робот». Оксфордский словарь английского языка. Проверено 27 ноября 2016 г.
- ^ «Прогнозы – обзор рынка беспилотных автомобилей» . driverless-future.com . Проверено 26 сентября 2023 г.
- ↑ Перейти обратно: Перейти обратно: а б «робототехника» . Оксфордские словари. Архивировано из оригинала 18 мая 2011 года . Проверено 4 февраля 2011 г.
- ^ Марголиус, Иван (осень 2017 г.). «Пражский робот» (PDF) . Друзья чешского наследия (17): 3–6. Архивировано (PDF) из оригинала 11 сентября 2017 года.
- ↑ Перейти обратно: Перейти обратно: а б с Зунт, Доминик. «Кто на самом деле изобрел слово «робот» и что оно означает?» . Сайт Карела Чапека. Архивировано из оригинала 4 февраля 2012 года . Проверено 11 сентября 2007 г.
- ^ Курфесс, Томас Р. (1 января 2005 г.). Справочник по робототехнике и автоматизации . Тейлор и Фрэнсис. ISBN 978-0-8493-1804-7 . Архивировано из оригинала 4 декабря 2016 года . Проверено 5 июля 2016 г. - через Google Книги.
- ^ Пирс, Джереми (15 августа 2011 г.). «Джордж К. Девол, изобретатель робота-манипулятора, умер в возрасте 99 лет» . Нью-Йорк Таймс . Архивировано из оригинала 25 декабря 2016 года . Проверено 7 февраля 2012 г.
В 1961 году General Motors поставила первый рычаг Unimate на сборочную линию на заводе компании в Юинг-Тауншип, штат Нью-Джерси, пригороде Трентона. Устройство использовалось для подъема и укладки литых под давлением металлических деталей, извлеченных из форм в горячем виде.
- ^ Акинс, Кристал. «5 рабочих мест заменяются роботами» . Эксель . Монстр. Архивировано из оригинала 24 апреля 2013 года . Проверено 15 апреля 2013 г.
- ↑ Перейти обратно: Перейти обратно: а б Хой, Грег (28 мая 2014 г.). «Роботы могут стоить австралийской экономике 5 миллионов рабочих мест, предупреждают эксперты, поскольку компании стремятся сократить расходы» . Новости АВС . Австралийская радиовещательная корпорация . Архивировано из оригинала 29 мая 2014 года . Проверено 29 мая 2014 г.
- ^ «Телеком-словарь «бот» » . Альянс телекоммуникационных решений. 26 сентября 2023 г.
- ^ Полк, Игорь (16 ноября 2005 г.). «Виртуальный тур по выставке роботов RoboNexus 2005» . Выставка Robonexus 2005. Архивировано из оригинала 12 августа 2007 года . Проверено 10 сентября 2007 г.
- ^ Харрис, Том (16 апреля 2002 г.). «Как работают роботы» . Как все работает. Архивировано из оригинала 26 августа 2007 года . Проверено 10 сентября 2007 г.
- ↑ Перейти обратно: Перейти обратно: а б с Нидэм, Джозеф (1991). Наука и цивилизация в Китае: Том 2, История научной мысли . Издательство Кембриджского университета. ISBN 978-0-521-05800-1 .
- ^ Карри, Адам (1999). «История робототехники» . Архивировано из оригинала 18 июля 2006 года . Проверено 10 сентября 2007 г.
- ^ Ноябрь. К. Л. 10
- ↑ Перейти обратно: Перейти обратно: а б Нидэм, Том 2, 54.
- ^ Дебора Левин Гера (2003). Древнегреческие идеи о речи, языке и цивилизации . Издательство Оксфордского университета. ISBN 978-0-19-925616-7 . Архивировано из оригинала 5 декабря 2016 года . Проверено 25 сентября 2016 г.
- ↑ Перейти обратно: Перейти обратно: а б с Рошайм, Марк Э. (1994). Эволюция роботов: развитие антропотехники . Вайли-IEEE. ISBN 0-471-02622-0 .
- ^ " «Роботы тогда и сейчас» . Би-би-си . 22 июля 2004 г. Архивировано из оригинала 20 декабря 2010 г.
- ^ О'Коннор, Джей-Джей и Э.Ф. Робертсон. «Биография цапли» . Архив MacTutor «История математики» . Проверено 26 сентября 2023 г.
- ^ Стронг, Дж. С. (2007). Реликвии Будды . Издательство Принстонского университета . стр. 133–134, 143. ISBN. 978-0-691-11764-5 .
- ^ Фаулер, Чарльз Б. (октябрь 1967 г.). «Музей музыки: история механических инструментов». Журнал музыкальных педагогов . 54 (2): 45–49. дои : 10.2307/3391092 . JSTOR 3391092 . S2CID 190524140 .
- ^ «Ранние часы» . Прогулка во времени . Физическая лаборатория НИСТ. 12 августа 2009 года . Проверено 13 октября 2022 г.
- ↑ Перейти обратно: Перейти обратно: а б «Программируемый робот Древней Греции» . Новый учёный : 32–35. 6 июля 2007 г.
- ^ Варадпанде, Манохар Лаксман (1987). История индийского театра, Том 1 . Публикации Абхинава. п. 68. ИСБН 978-81-7017-221-5 .
- ^ Вуястик, Доминик (2003). Корни Аюрведы: отрывки из санскритских медицинских сочинений . Пингвин. п. 222. ИСБН 978-0-14-044824-5 .
- ^ Нидэм, Джозеф (1965). Наука и цивилизация в Китае: Том 4, Физика и физические технологии, Часть 2, Машиностроение . Издательство Кембриджского университета. п. 164. ИСБН 978-0-521-05803-2 .
- ↑ Перейти обратно: Перейти обратно: а б «Аль-Джазари | Арабский изобретатель» . Британская энциклопедия . Проверено 15 июня 2019 г.
- ^ Говард Р. Тернер (1997). Наука в средневековом исламе: иллюстрированное введение . Издательство Техасского университета . п. 81. ИСБН 0-292-78149-0 .
- ^ Хилл, Дональд (май 1991 г.). «Машиностроение на Средневековом Ближнем Востоке». Научный американец . стр. 64–69. ( см. Хилл, Дональд . «История наук в исламском мире» . IX. Машиностроение. Архивировано из оригинала 25 декабря 2007 года .)
- ^ Древние открытия. Исламская наука. Часть1 . Архивировано из оригинала 11 декабря 2021 года . Проверено 15 июня 2019 г.
- ^ Моран, Мэн (декабрь 2006 г.). «Робот да Винчи». Дж. Эндурол . 20 (12): 986–90. дои : 10.1089/конец.2006.20.986 . ПМИД 17206888 .
... датой проектирования и возможной постройки этого робота был 1495 год... Начиная с 1950-х годов исследователи Калифорнийского университета начали размышлять над значением некоторых отметок да Винчи на, казалось бы, технических чертежах.. Сейчас известно, что робот да Винчи имел внешний вид германского рыцаря.
- ^ Труитт, ER (2015). Средневековые роботы: механизм, магия, природа и искусство . Серия «Средние века». Университет Пенсильвании Пресс, Инкорпорейтед. п. 136. ИСБН 978-0-8122-9140-7 . Проверено 21 января 2023 г.
- ^ «Роботы Леонардо да Винчи» . Леонардо3.нет. Архивировано из оригинала 24 сентября 2008 года . Проверено 25 сентября 2008 г.
- ^ Закон, Джейн Мари (1997). Марионетки ностальгии – жизнь, смерть и возрождение японской традиции Авадзи Нингё . Издательство Принстонского университета . ISBN 978-0-691-02894-1 .
- ^ Вуд, Габби (16 февраля 2002 г.). «Живые куклы: волшебная история поисков механической жизни» . Хранитель . Архивировано из оригинала 20 декабря 2016 года.
- ^ «Мальчик-робот 1774 года» . 21 февраля 2018 г.
- ^ Эдвин Грей, Торпеды девятнадцатого века и их изобретатели, стр. 18.
- ^ Грей, Эдвин (2004). Торпеды девятнадцатого века и их изобретатели . Издательство Военно-морского института. ISBN 978-1-59114-341-3 .
- ^ Зайфер, Марк (24 октября 2011 г.). Жизнь и времена Николы Теслы . Цитадель. п. 1893. ISBN 978-0-8065-3556-2 . Архивировано из оригинала 5 декабря 2016 года.
- ^ Мисснер, Бенджамин Франклин (1916). Радиодинамика: беспроводное управление торпедами и другими механизмами . Компания Д. Ван Ностранда. п. 83.
- ^ США 613809 , Тесла, Никола, «Способ и устройство для управления механизмом движущихся сосудов или транспортных средств», опубликовано 8 ноября 1898 г.
- ^ «Тесла – повелитель молний» . ПБС. Архивировано из оригинала 28 сентября 2008 года . Проверено 24 сентября 2008 г.
- ^ Саркар 2006, стр. 97.
- ^ Торрес, Леонардо, « GB190327073 (A) - Средство или метод управления механическими движениями на расстоянии или на расстоянии », Espacenet , 10 декабря 1903 г.
- ^ АП Юсте (январь 2008 г.). «Ранние разработки беспроводного дистанционного управления: Телекино Торрес-Кеведо» . Труды IEEE . 96 (1): 186–190. дои : 10.1109/JPROC.2007.909931 . S2CID 111010868 .
- ^ «1902 — Телекин (Телекино) — Леонардо Торрес Кеведо (исп.)» . 17 декабря 2010 г.
- ^ HR Эверетт (2015). Беспилотные системы Первой и Второй мировых войн . МТИ Пресс . стр. 91–95. ISBN 978-0-262-02922-3 .
- ^ «Э. Х. Реффелл и робот Эрик (1928) — первый британский робот» . Проверено 26 сентября 2023 г.
- ^ «1932 — Джордж Робот — капитан У. Х. Ричардс (британец)» . www.cyberneticzoo.com . Проверено 26 сентября 2023 г.
- ^ «Мечты робота: странная история о том, как человек пытается восстановить своего механического друга детства» . Кливленд Фри Таймс . Архивировано из оригинала 15 января 2010 года . Проверено 25 сентября 2008 г.
- ^ Шаут, Скотт (2006). Роботы Westinghouse: 1924-сегодня . Мемориальный музей Мэнсфилда. ISBN 978-0-9785844-1-2 .
- ^ Раскрыты секреты летающей бомбы: специальный чертеж в разрезе и автоматическое управление полетом и пикированием робота . Иллюстрированные лондонские новости. 1944 год.
- ^ Холланд, Оуэн. «Онлайн-архив Грея Уолтера» . Архивировано из оригинала 9 октября 2008 года . Проверено 25 сентября 2008 г.
- ^ Вауржиняк, Патрик (июль 2006 г.). «Мастера производства: Джозеф Ф. Энгельбергер» . Общество инженеров-технологов . 137 (1). Архивировано из оригинала 9 ноября 2011 года . Проверено 25 сентября 2008 г.
- ^ «Зал славы роботов – Unimate» . Университет Карнеги-Меллон . Проверено 26 сентября 2023 г.
- ^ «История компании» . Fuji Yusoki Kogyo Co. Архивировано из оригинала 4 февраля 2013 года . Проверено 12 сентября 2008 г.
- ^ «Промышленный робот KUKA FAMULUS» . Архивировано из оригинала 10 июня 2013 года . Проверено 10 января 2008 г.
- ^ «История промышленных роботов» (PDF) . Архивировано из оригинала (PDF) 24 декабря 2012 года . Проверено 27 октября 2012 г.
- ^ «История промышленных роботов» . robots.com . Архивировано из оригинала 8 июля 2015 года . Проверено 24 августа 2015 г.
- ^ "О нас" . Архивировано из оригинала 9 января 2014 года.
{{cite web}}: CS1 maint: неподходящий URL ( ссылка ) - ^ «RoboHon: милый маленький робот со смартфоном | Codexify» . Архивировано из оригинала 7 октября 2015 года . Проверено 6 октября 2015 г.
- ^ Тесфайе, Мехрет (13 августа 2009 г.). «Роботы получат собственную операционную систему» . Эфиопский обзор . Архивировано из оригинала 18 сентября 2009 года.
- ^ Мёкен, Юмико (январь 2009 г.). Исследования и разработки сервисных роботов нового поколения в Японии (отчет Министерства иностранных дел Великобритании). Отдел науки и инноваций, посольство Великобритании, Токио , Япония. Архивировано из оригинала 23 июля 2012 года.
- ^ Дахия, Равиндер С.; Валле, Маурицио (30 июля 2012 г.). Роботизированное тактильное зондирование – технологии и системы . Спрингер. дои : 10.1007/978-94-007-0579-1 . ISBN 978-94-007-0578-4 . Архивировано из оригинала 29 декабря 2013 года . Проверено 8 февраля 2014 г.
- ^ Дахия, Равиндер С.; Метта, Джорджио; Канната, Джорджио; Валле, Маурицио (2011). «Специальный выпуск гостевой редакционной статьи о роботизированном осязании». Транзакции IEEE в робототехнике . 27 (3): 385–388. дои : 10.1109/TRO.2011.2155830 . S2CID 18608163 .
- ^ Энгельбергер, Джозеф Ф. (август 1982 г.). «Робототехника на практике: возможности будущего». Электронное обслуживание и технологии .
- ^ Маккио, Тим (1 декабря 2008 г.). «Беспилотный самосвал Caterpillar» . Компания Фаст . Архивировано из оригинала 7 июня 2011 года.
- ^ Вайс, Ричард (9 декабря 2014 г.). «Беспилотные грузовики произведут революцию в логистике, заявляет DHL» . Новости Блумберга . Архивировано из оригинала 22 июля 2016 года.
- ^ Грейсон, Уэйн (16 октября 2014 г.). ВИДЕО: Почему технология автономной добычи полезных ископаемых Caterpillar «полностью отличается от всего, что она когда-либо создавала» . Архивировано из оригинала 13 мая 2016 года.
- ^ Такахаши, Каори (23 апреля 2015 г.). «Беспилотные самосвалы и автоматические экскаваторы приходят на австралийские шахты» . Архивировано из оригинала 9 мая 2016 года.
- ^ Холл, Мэтью (20 октября 2014 г.). «Забудьте о беспилотных автомобилях Google: в Австралии есть беспилотные грузовики» . Возраст . Архивировано из оригинала 26 апреля 2016 года.
- ^ Кларк, Чарльз (19 октября 2015 г.). «Австралийский горнодобывающий гигант Rio Tinto использует эти огромные самоуправляемые грузовики для перевозки железной руды» . Бизнес-инсайдер . Архивировано из оригинала 9 мая 2016 года.
- ^ Берман, Деннис К. (23 июля 2013 г.). «Папа, а кем был водитель грузовика? В ближайшие два десятилетия машины сами возьмут на себя управление автомобилем» . Уолл Стрит Джорнал . Архивировано из оригинала 4 марта 2017 года.
- ^ «Робот может читать и учиться, как человек» . Новости Эн-Би-Си . 6 декабря 2010 года . Проверено 10 декабря 2010 г.
- ^ Мелик, Джеймс (3 января 2013 г.). «Роботы: дивный новый мир становится на шаг ближе» . Деловая газета . Всемирная служба Би-би-си. Архивировано из оригинала 14 января 2019 года.
- ^ «Кухонный робот в Риге готовит новое будущее для фаст-фуда» . techxplore.com . Проверено 14 августа 2021 г.
- ^ «Технологии могут увеличить разрыв между богатыми и бедными» . Футуризм . Проверено 23 августа 2021 г.
- ^ «Индоевропейский корень *orbh- » . Бартлби . 12 мая 2008 г. Архивировано из оригинала 24 января 2009 г. . Проверено 8 февраля 2014 г.
- ^ «робот» . Интернет-словарь этимологии . Проверено 26 сентября 2023 г.
- ^ «Первый роман Хэнка Грина — совершенно замечательная вещь» . Индианаполис Ежемесячник . 1 октября 2018 года . Проверено 20 ноября 2019 г.
- ^ «Вы неправильно произносите слово «робот» . Ежедневный Кос . Проверено 20 ноября 2019 г.
- ^ Рейнджер, Стив (20 декабря 2013 г.). «Роботы смерти, роботы любви: Реальность солдат-андроидов и почему законы для роботов обречены на провал» . Техреспублика . Архивировано из оригинала 27 января 2017 года . Проверено 21 января 2017 г.
- ^ Мубарак, Пол М.; Бен-Цви, Пинхас (2011). «Адаптивное манипулирование мобильным роботом с гибридным механизмом». 2011 Международный симпозиум IEEE по робототехнике и сенсорной среде (ROSE) . стр. 113–118. дои : 10.1109/ROSE.2011.6058520 . ISBN 978-1-4577-0819-0 . S2CID 8659998 .
- ↑ Перейти обратно: Перейти обратно: а б «Умный Кэдди» . Зегрид. Архивировано из оригинала 11 октября 2007 года . Проверено 13 сентября 2007 г.
- ^ Чжан, Гэсян; Перес-Хименес, Марио Х.; Георге, Мариан (5 апреля 2017 г.). Реальные приложения с мембранными вычислениями . Спрингер. ISBN 978-3-319-55989-6 .
- ^ Каган, Э.; Швальб, Н.; Гал, И. (2019). Автономные мобильные роботы и мультироботные системы: планирование движения, коммуникация и роение . Джон Уайли и сыновья. ISBN 978-1-119-21286-7 . ПП 65-69.
- ^ Патич, Дипак; Ансари, Мунсаф; Тендулкар, Дилиша; Бхатлекар, Ритеш; Наик, Виджайкумар; Шайлендра, Павар (2020). «Обзор автономного робота военной службы» . Международная конференция по новым тенденциям в области информационных технологий и инженерии 2020 года (Ic-ETITE) . Международная конференция IEEE по новым тенденциям в области информационных технологий и инженерии. стр. 1–7. doi : 10.1109/ic-ETITE47903.2020.78 . ISBN 978-1-7281-4142-8 . S2CID 216588335 .
- ^ «Определение робота» (PDF) . Dansk Robot Forening. Архивировано из оригинала (PDF) 28 июня 2007 года . Проверено 10 сентября 2007 г.
- ^ «Сайты стандартов, связанных с робототехникой» . Европейская исследовательская сеть робототехники. Архивировано из оригинала 17 июня 2006 года . Проверено 15 июля 2008 г.
- ^ «Сервисные роботы» . Международная федерация робототехники . 27 октября 2012 г. Архивировано из оригинала 18 февраля 2010 г.
- ^ Митганг, Ли (25 октября 1983 г.). « Говорящая черепаха» Пофилса «Нова», верховного жреца школьного компьютерного движения». Гейнсвилл Сан .
- ^ Барнард, Джефф (29 января 1985 г.). «Роботы в школе: игры или обучение?» . Обозреватель-репортер . Вашингтон. Архивировано из оригинала 22 сентября 2015 года . Проверено 7 марта 2012 г.
- ^ «Образование: Чудо Бронкса» . Время . Апрель 1974 года. Архивировано из оригинала 24 мая 2019 года . Проверено 19 мая 2019 г.
- ^ «Архив Лихима» . www.cyberneticzoo.com . 13 сентября 2010 г. Архивировано из оригинала 28 мая 2019 г. . Проверено 29 мая 2019 г.
- ^ П. Мубарак и др., Модульная и реконфигурируемая мобильная робототехника, Журнал робототехники и автономных систем, 60 (12) (2012) 1648–1663.
- ^ Редактирование (25 декабря 2011 г.). «Франко-Квебекский консорциум Mix представляет проект летающего автомобиля» (на французском языке). aerobuzz.fr. Архивировано из оригинала 6 октября 2012 года . Проверено 7 сентября 2012 г.
- ^ Сканлан, Стив (сентябрь 2009 г.). «Модульность в робототехнике обеспечивает автоматизацию для всех» . Электронные продукты и технологии. Архивировано из оригинала 5 июля 2012 года . Проверено 7 сентября 2012 г.
- ^ «Роботы для чистки воздуховодов» (PDF) . Робототехника Дизайн Инк . Сантехника и система отопления, вентиляции и кондиционирования. Апрель 2010 г. Архивировано (PDF) из оригинала 25 апреля 2013 г. . Проверено 29 апреля 2010 г.
- ^ «Универсальные роботы взаимодействуют за пределами корпусов | Техника управления» . Controleng.com. Февраль 2013. Архивировано из оригинала 18 мая 2013 года . Проверено 4 июня 2013 г.
- ^ Питтман, Каган (19 мая 2016 г.). «ИНФОГРАФИКА: Краткая история коллаборативных роботов» . Engineering.com . Архивировано из оригинала 10 июня 2016 года.
- ^ Хагерти, Джеймс (18 сентября 2012 г.). «Робот Бакстер отправляется на работу » . Уолл Стрит Джорнал . Нью-Йорк. Архивировано из оригинала 10 апреля 2015 года . Проверено 29 мая 2014 г.
- ^ Маркофф, Джон (18 сентября 2012 г.). «Робот с обнадеживающим прикосновением» . Нью-Йорк Таймс . Архивировано из оригинала 19 сентября 2012 года . Проверено 18 сентября 2012 г.
- ^ «Терминатор, играющий в пинг-понг» . Популярная наука . Архивировано из оригинала 29 марта 2011 года . Проверено 18 декабря 2010 г.
- ^ «Лучший робот 2009 года» . Нетерион . Технический журнал.
- ^ «Роботы сегодня и завтра: IFR представляет обзор мировой статистики робототехники за 2007 год» . РоботВоркс . 29 октября 2007 г. Архивировано из оригинала 5 февраля 2008 г. Проверено 14 декабря 2007 г.
- ^ «Японские роботы изо всех сил пытаются стать чемпионами мира» . Рейтер . 2 декабря 2007 г. Архивировано из оригинала 13 декабря 2007 г. Проверено 1 января 2007 г.
- ↑ Перейти обратно: Перейти обратно: а б Хо, CC; Макдорман, К.Ф.; Прамоно, ЗАД (2008). Человеческие эмоции и зловещая долина: анализ рейтингов видео роботов с помощью GLM, MDS и ISOMAP (PDF) . 2008 г. 3-я Международная конференция ACM/IEEE по взаимодействию человека и робота (HRI). Архивировано (PDF) из оригинала 11 сентября 2008 г. Проверено 24 сентября 2008 г.
- ↑ Перейти обратно: Перейти обратно: а б «Темы ИИ/Этика» . Ассоциация по развитию искусственного интеллекта . Архивировано из оригинала 5 августа 2011 года.
- ^ «Роботы могут быть расистами и сексистами, предупреждает новое исследование» . ТРТ Мир . Проверено 27 июня 2022 г.
- ^ «Указатель новостей по темам — Архив ЭТИЧЕСКИХ И СОЦИАЛЬНЫХ ПОСЛЕДСТВИЙ» . Ассоциация по развитию искусственного интеллекта . Архивировано из оригинала 6 апреля 2012 года.
- ^ Макнили, Кристи (29 июля 2009 г.). «Ученые предсказывают появление искусственного мозга через 10 лет» . Архивировано из оригинала 29 ноября 2009 года.
- ^ Моравец, Ганс (1999). Робот: простая машина для трансцендентного разума . Издательство Оксфордского университета. ISBN 978-0-19-513630-2 . Архивировано из оригинала 5 декабря 2016 года.
- ^ Вейганд, Мэтью (17 августа 2009 г.). «Роботы почти покоряют ходьбу, чтение, танцы» . Корея IT-раз . Архивировано из оригинала 21 июля 2011 года.
- ^ Шанце, Йенс. «Подключи и молись» . Архивировано из оригинала 12 февраля 2016 года.
- ↑ Перейти обратно: Перейти обратно: а б Маркофф, Джон (26 июля 2009 г.). «Ученые опасаются, что машины могут перехитрить человека» . Нью-Йорк Таймс . Архивировано из оригинала 1 июля 2017 года.
- ^ Виндж, Вернор (1993). «Грядущая технологическая сингулярность: как выжить в постчеловеческую эпоху» . Архивировано из оригинала 1 января 2007 года.
- ^ Сингер, PW (21 мая 2009 г.). «Игры в революцию роботов: эксперт по военным технологиям высказывает мнение о Терминаторе: Спасение» . Сланец . Архивировано из оригинала 27 января 2010 года.
- ^ «Захват роботов» . gyre.org . Архивировано из оригинала 19 апреля 2012 года.
- ^ «Роботапокалипсис» . Engadget . Архивировано из оригинала 4 мая 2018 года.
- ^ Палмер, Джейсон (3 августа 2009 г.). «Призыв к дискуссии о роботах-убийцах» . Новости Би-би-си . Архивировано из оригинала 7 августа 2009 года.
- ^ Акс, Дэвид (13 августа 2009 г.). «Робот-тройник предвещает автономное будущее» . Проводной . Архивировано из оригинала 7 ноября 2012 года.
- ^ Мик, Джейсон (17 февраля 2009 г.). «Новый отчет, финансируемый ВМФ, предупреждает о том, что боевые роботы станут «Терминаторами» » . ДейлиТех . Архивировано из оригинала 28 июля 2009 года.
- ^ Флэтли, Джозеф Л. (18 февраля 2009 г.). «Доклад ВМФ предупреждает о восстании роботов, что свидетельствует о сильном моральном компасе» . Engadget . Архивировано из оригинала 4 июня 2011 года.
- ^ Лэмб, Грегори М. (17 февраля 2010 г.). «Новая роль роботов-воинов» . Христианский научный монитор . Архивировано из оригинала 24 сентября 2015 года.
- ^ «Военный робот, питающийся биомассой, — вегетарианец, заявляет компания» . Фокс Ньюс. 16 июля 2009 года. Архивировано из оригинала 3 августа 2009 года . Проверено 31 июля 2009 г.
- ^ Шахтман, Ной (17 июля 2009 г.). «Комната опасности: что дальше в компании национальной безопасности отрицает, что ее роботы питаются мертвецами» . Проводной . Архивировано из оригинала 29 июля 2009 года . Проверено 31 июля 2009 г.
- ^ «Cyclone Power Technologies отвечает на слухи о «плотоядном» военном роботе» (PDF) (пресс-релиз). RTI Inc., 16 июля 2009 г., стр. 1–2. Архивировано (PDF) из оригинала 23 августа 2009 г.
- ^ «Краткий обзор проекта EATR: энергетически автономный тактический робот» (PDF) . RTI Inc., 6 апреля 2009 г., с. 22.
- ^ Мануэль де Ланда , Война в эпоху интеллектуальных машин , Нью-Йорк: Zone Books, 1991, 280 страниц, твердый переплет, ISBN 0-942299-76-0 ; Мягкая обложка, ISBN 0-942299-75-2 .
- ^ Макгоги, Э. (2022 г.) [10 января 2018 г.]. «Автоматизируют ли роботы вашу работу? Полная занятость, базовый доход и экономическая демократия» . Журнал промышленного права . 51 (3). дои : 10.2139/ssrn.3119589 . ССНН 3119589 .
- ^ Портер, Эдуардо; Манджу, Фархад (9 марта 2016 г.). «Будущее без рабочих мест? Два взгляда на меняющуюся рабочую силу» . Нью-Йорк Таймс . Архивировано из оригинала 15 февраля 2017 года . Проверено 23 февраля 2017 г.
- ^ Томпсон, Дерек (июль – август 2015 г.). «Мир без работы» . Атлантика . Архивировано из оригинала 27 февраля 2017 года . Проверено 11 марта 2017 г.
- ^ Ян (30 июля 2011 г.). «Foxconn заменит рабочих 1 миллионом роботов через 3 года» . Информационное агентство Синьхуа. Архивировано из оригинала 8 октября 2011 года . Проверено 4 августа 2011 г.
- ^ «Судный день – трудовое право и роботы на рабочем месте» . будущеерабочего центра . 20 ноября 2014 года. Архивировано из оригинала 3 апреля 2015 года . Проверено 7 января 2015 г.
- ^ Делани, Кевин (17 февраля 2017 г.). «Робот, который занимает вашу работу, должен платить налоги», — говорит Билл Гейтс . Кварц . Архивировано из оригинала 5 марта 2017 года . Проверено 4 марта 2017 г.
- ^ «Изменение характера труда» . Архивировано из оригинала 30 сентября 2018 года . Проверено 8 октября 2018 г.
- ^ Талбот, Бен; Даюб, Ферас; Корк, Питер; Уайет, Гордон (декабрь 2021 г.). «Навигация робота в невидимых пространствах с помощью абстрактной карты» . Транзакции IEEE в когнитивных системах и системах развития . 13 (4): 791–805. arXiv : 2001.11684 . дои : 10.1109/TCDS.2020.2993855 . ISSN 2379-8939 . S2CID 211004032 .
- ^ «Контактные системы захвата и размещения роботов» . Контактные системы. Архивировано из оригинала 14 сентября 2008 года . Проверено 21 сентября 2008 г.
- ^ «Переборное оборудование SMT» . Ассамблеон. Архивировано из оригинала 3 августа 2008 года . Проверено 21 сентября 2008 г.
- ^ «Основы автоматизированных управляемых транспортных средств» . Савант Автоматизация, AGV Systems. Архивировано из оригинала 8 октября 2007 года . Проверено 13 сентября 2007 г.
- ^ «Автоматическая загрузка прицепа — SmartLoader» . Архивировано из оригинала 23 мая 2013 года . Проверено 2 сентября 2011 г.
- ^ «Специминдер» . CSS Робототехника. Архивировано из оригинала 1 июля 2009 года . Проверено 25 сентября 2008 г.
- ^ «Робот АДАМ» . РМТ Робототехника. Архивировано из оригинала 17 мая 2006 года . Проверено 25 сентября 2008 г.
- ^ «Могу сделать» . Этон. Архивировано из оригинала 3 августа 2008 года . Проверено 25 сентября 2008 г.
- ^ «Робот Эскорта» . Феннек Фокс Технологии. Архивировано из оригинала 6 декабря 2011 года . Проверено 25 ноября 2011 г.
- ^ «Доставочные роботы и AGV» . Мобильные роботы. Архивировано из оригинала 26 февраля 2010 года . Проверено 25 сентября 2008 г.
- ^ «Данте II, список опубликованных работ» . Институт робототехники Университета Карнеги-Меллон. Архивировано из оригинала 15 мая 2008 года . Проверено 16 сентября 2007 г.
- ^ «Миссия Mars Pathfinder: Rover Sojourner» . НАСА . 8 июля 1997 года. Архивировано из оригинала 1 февраля 2017 года . Проверено 19 сентября 2007 г.
- ↑ Перейти обратно: Перейти обратно: а б «Робот-ассистированная хирургия: хирургическая система да Винчи» . Отделение биологии и медицины Университета Брауна. Архивировано из оригинала 16 сентября 2007 года . Проверено 19 сентября 2007 г.
- ^ «Использование роботизированных космических зондов в миссиях в дальний космос: практический пример протоколов искусственного интеллекта и требований к ядерной энергии» . Материалы Международной конференции по машиностроению, робототехнике и аэрокосмической промышленности 2011 г. Октябрь 2011.
- ^ Фауст, Джефф (16 января 2012 г.). «Обзор: Космические зонды» . Архивировано из оригинала 31 августа 2012 года. Обзор космических зондов: 50 лет исследований от Луны-1 до новых горизонтов, автор: Филипп Сегела Светлячок, 2011.
- ^ «Знаменитости собираются воспользоваться LongPen Этвуда» . Канадская радиовещательная корпорация. 15 августа 2007 года. Архивировано из оригинала 22 мая 2009 года . Проверено 21 сентября 2008 г.
- ^ Грэм, Стивен (12 июня 2006 г.). «Американская армия роботов» . Новый государственный деятель . Архивировано из оригинала 17 февраля 2012 года . Проверено 24 сентября 2007 г.
- ^ «Роботы поля боя: в Ирак и за его пределы» . Ежедневник оборонной промышленности . 20 июня 2005 г. Архивировано из оригинала 26 августа 2007 г. Проверено 24 сентября 2007 г.
- ^ Шахтман, Ной (ноябрь 2005 г.). «Багдадский бомбардировщик» . Проводной . Архивировано из оригинала 22 апреля 2008 года . Проверено 14 сентября 2007 г.
- ^ Шахтман, Ной (2 августа 2007 г.). «WIRED: Первые вооруженные роботы патрулируют Ирак (обновлено)» . Проводной . Проверено 26 сентября 2023 г.
- ^ Шахтман, Ной (28 марта 2013 г.). «WIRED: Вооруженных роботов отправили в полицию» . Проводной . Архивировано из оригинала 12 апреля 2009 года . Проверено 8 февраля 2014 г.
- ^ «Американская армия роботов: готовы ли к бою беспилотные истребители?» . Популярная механика. 17 декабря 2009 года . Проверено 26 сентября 2023 г.
- ^ Хагерман, Эрик (23 февраля 2010 г.). «Настоящее и будущее беспилотных летательных аппаратов: иллюстрированное практическое руководство» . Популярная наука . Архивировано из оригинала 26 февраля 2010 года.
- ^ Хиггинс, Кэт (12 июля 2010 г.). «Таранис: истребитель будущего стоимостью 143 миллиона фунтов стерлингов» . Небесные новости онлайн . Архивировано из оригинала 15 июля 2010 года . Проверено 13 июля 2010 г.
- ^ Эмери, Дэниел (12 июля 2010 г.). «Минобороны снимает крышку с прототипа беспилотного боевого самолета» . Новости Би-би-си . Архивировано из оригинала 12 июля 2010 года . Проверено 12 июля 2010 г.
- ^ Президентская комиссия AAAI по долгосрочному исследованию будущего искусственного интеллекта на 2008–2009 годы (отчет). Ассоциация по развитию искусственного интеллекта. Архивировано из оригинала 28 августа 2009 года . Проверено 26 июля 2009 г.
- ^ «Зачем нам нужен дружественный ИИ» . 3 закона небезопасны . Июль 2004 г. Архивировано из оригинала 24 мая 2012 г. Проверено 27 июля 2009 г.
{{cite web}}: CS1 maint: неподходящий URL ( ссылка ) - ^ «Век роботов ставит этическую дилемму» . Новости Би-би-си . 7 марта 2007 г. Архивировано из оригинала 15 февраля 2009 г. Проверено 2 января 2007 г.
- ^ Кристенсен, Билл (26 мая 2006 г.). «Первый закон Азимова: Япония устанавливает правила для роботов» . Живая наука . Архивировано из оригинала 13 октября 2008 года.
- ^ «Япония разрабатывает правила для продвинутых роботов» . УПИ. 6 апреля 2007 г. Архивировано из оригинала 11 октября 2008 г. – на сайте physorg.com.
- ^ «Построение безопасной и надежной социальной системы, включающей сосуществование людей и роботов» (пресс-релиз). Министерство экономики, торговли и промышленности . Март 2009 г. Архивировано из оригинала 27 сентября 2011 г.
- ^ Вен, Юэ-Сюань; Чен, Цзянь-Сюнь; Сунь, Чуэн-Цай (25 апреля 2009 г.). «На пути к обществу сосуществования человека и робота: информация о безопасности для роботов следующего поколения». Международный журнал социальной робототехники . 1 (4): 267–282. дои : 10.1007/s12369-009-0019-1 . S2CID 36232530 .
- ^ Фокс, Стюарт (19 августа 2009 г.). «Эволюционирующие роботы учатся лгать друг другу» . Популярная наука .
- ^ «Медиацентр Rio Tinto – Rio Tinto увеличивает парк беспилотных грузовиков до 150 в рамках программы «Шахта будущего™» . Риотинто.com. Архивировано из оригинала 24 апреля 2013 года . Проверено 8 февраля 2014 г.
- ^ «Удары BHP Billiton идут на автономные тренировки» . Проверено 13 февраля 2023 г.
- ^ Адриан (6 сентября 2011 г.). «Блог AIMEX — Автономное горнодобывающее оборудование» . Adrianboeing.blogspot.com. Архивировано из оригинала 18 декабря 2013 года . Проверено 8 февраля 2014 г.
- ^ «Атлас Копко – РКС» . Atlascopco.com. Архивировано из оригинала 7 февраля 2014 года . Проверено 8 февраля 2014 г.
- ^ «Трансмин – Роклогик» . Rocklogic.com.au. Архивировано из оригинала 25 января 2014 года . Проверено 8 февраля 2014 г.
- ^ Топпинг, Майк; Смит, Джейн (1999). «Обзор Handy 1, реабилитационного робота для людей с ограниченными возможностями» . Материалы конференции Центра CSUN по проблемам инвалидов . 1999. Материалы заседания: 59-е заседание. Архивировано из оригинала 5 августа 2009 года . Проверено 14 августа 2010 г.
Ранняя версия системы Handy 1 состояла из роботизированной руки Cyber 310 с пятью степенями свободы и захватом.
- ^ Дживанс, Кристина (29 ноября 2004 г.). «Добро пожаловать в стареющее будущее» . Новости Би-би-си . Архивировано из оригинала 16 октября 2007 года . Проверено 26 сентября 2007 г.
- ^ «Статистический справочник Японии: Глава 2. Население» . Статистическое бюро и Институт статистических исследований и обучения. Архивировано из оригинала 6 сентября 2013 года . Проверено 26 сентября 2007 г.
- ^ «Роботизированное будущее ухода за пациентами» . Инсайдер электронного здравоохранения. 16 августа 2007 года. Архивировано из оригинала 21 ноября 2007 года . Проверено 26 сентября 2007 г.
- ^ Гебхарт, Фред (4 июля 2019 г.). «Будущее автоматизации аптек» . Журнал тем о наркотиках . Темы о наркотиках, июль 2019 г. 163 (7) . Проверено 16 октября 2022 г.
- ^ Долан, Керри А. «У R2D2 есть свои таблетки» . Форбс . Проверено 20 ноября 2019 г.
- ^ «Наноботы играют в футбол» . Техбирбал. Архивировано из оригинала 3 апреля 2013 года . Проверено 8 февраля 2014 г.
- ^ «КурцвейлАИ.нет» . 21 июня 2010 года. Архивировано из оригинала 21 июня 2010 года . Проверено 5 июля 2016 г.
- ^ «(Эрик Дрекслер, 1986) Машины созидания, грядущая эра нанотехнологий» . E-drexler.com. Архивировано из оригинала 6 сентября 2014 года . Проверено 8 февраля 2014 г.
- ^ Феникс, Крис (декабрь 2003 г.). «О химии, наноботах и политике» . Центр ответственных нанотехнологий. Архивировано из оригинала 11 октября 2007 года . Проверено 28 октября 2007 г.
- ^ «Пионер нанотехнологий развеивает мифы о «серой слизи»» . ScienceDaily . 9 июня 2004 г.
- ^ Тот-Фейел, Тихамер (май 1996 г.). LEGO™ к звездам: активные мезоструктуры, кинетические клеточные автоматы и параллельные наномашины для космических применений . 1996 Международная конференция по космическому развитию. Нью-Йорк. Архивировано из оригинала 27 сентября 2007 года.
- ^ Фитч, Роберт; Батлер, Зак; Рус, Даниэла. «Планирование реконфигурации гетерогенных самореконфигурируемых роботов» (PDF) . Массачусетский технологический институт . Архивировано из оригинала (PDF) 19 июня 2007 года.
- ^ «Исследователи создают робота-ученого, который уже обнаружил новый катализатор» . физ.орг . Проверено 16 августа 2020 г. .
- ^ Бургер, Бенджамин; Маффеттоне, Филипп М.; Гусев Владимир Владимирович; Эйчисон, Кэтрин М.; Бай, Ян; Ван, Сяоянь; Ли, Сяобо; Олстон, Бен М.; Ли, Буи; Клоуз, Роб; Рэнкин, Никола; Харрис, Брэндон; Сприк, Райнер Себастьян; Купер, Эндрю И. (июль 2020 г.). «Мобильный робот-химик» . Природа . 583 (7815): 237–241. Бибкод : 2020Natur.583..237B . дои : 10.1038/s41586-020-2442-2 . ISSN 1476-4687 . ПМИД 32641813 . S2CID 220420261 . Проверено 16 августа 2020 г. .
- ^ Шварц, Джон (27 марта 2007 г.). «В лаборатории: роботы, которые крадутся и извиваются» . Нью-Йорк Таймс . Архивировано из оригинала 3 апреля 2015 года . Проверено 22 сентября 2008 г.
- ^ Эшнер, Кэт (25 марта 2019 г.). «У мягких роботов теперь есть мягкие компьютеры, которые ими управляют» . Популярная наука .
- ^ «Мягкая сторона робототехники» . Май 2019 года . Проверено 13 февраля 2023 г.
- ^ «НИИ/МобильныеРоботы» . activrobots.com . Архивировано из оригинала 12 февраля 2009 года.
- ^ «Проект микророботов с открытым исходным кодом» . Архивировано из оригинала 11 ноября 2007 года . Проверено 28 октября 2007 г.
- ^ «Рой» . Корпорация АйРобот. Архивировано из оригинала 27 сентября 2007 года . Проверено 28 октября 2007 г.
- ^ Кнапп, Луиза (21 декабря 2000 г.). «Смотри, в небе: Робофлай» . Проводной . Архивировано из оригинала 26 июня 2012 года . Проверено 25 сентября 2008 г.
- ^ «Передовой гаптики» . Обзор технологий MIT . Проверено 25 сентября 2008 г.
- ^ «Выставка художников и роботов в Большом дворце 5 апреля или 9 июля 2018 года» . 14 августа 2019 года. Архивировано из оригинала 14 августа 2019 года . Проверено 3 февраля 2020 г. .
- ^ «Комический потенциал: вопросы и ответы с режиссером Стивеном Коулом» . Корнелльский университет. Архивировано из оригинала 3 января 2009 года . Проверено 21 ноября 2007 г.
- ^ Фридман, Карл, изд. (2005). Беседы с Айзеком Азимовым (1-е изд.). Джексон: Univ. Пресса Миссисипи. п. VII. ISBN 978-1-57806-738-1 . Проверено 4 августа 2011 г.
... вполне возможно, самый плодовитый
- ^ Оукс, Элизабет Х. (2004). Американские писатели . Нью-Йорк: факты в архиве. п. 24 . ISBN 978-0-8160-5158-8 . Проверено 4 августа 2011 г.
наиболее плодовитые авторы Азимова.
- ↑ Он написал «более 460 книг, а также тысячи статей и обзоров» и был «третьим по плодовитости писателем всех времен [и] одним из отцов-основателей современной научной фантастики». Уайт, Майкл (2005). Айзек Азимов: жизнь великого мастера научной фантастики . Кэрролл и Граф. стр. 1–2. ISBN 978-0-7867-1518-3 . Архивировано из оригинала 5 декабря 2016 года . Проверено 25 сентября 2016 г.
- ^ Р. Кларк. «Законы робототехники Азимова – последствия для информационных технологий» . Австралийский национальный университет/IEEE. Архивировано из оригинала 22 июля 2008 года . Проверено 25 сентября 2008 г.
- ^ Зейлер, Эдвард; Дженкинс, Джон Х. (27 июня 2008 г.). «Часто задаваемые вопросы об Айзеке Азимове» . Домашняя страница Айзека Азимова. Архивировано из оригинала 16 июля 2012 года . Проверено 24 сентября 2008 г.
- ^ Уайт, Майкл (2005). Айзек Азимов: Жизнь великого магистра научной фантастики . Кэрролл и Граф. п. 56. ИСБН 978-0-7867-1518-3 .
- ^ «Интеллектуальные машины: призыв к запрету роботов, предназначенных для секс-игрушек» . Новости Би-би-си . 15 сентября 2015 г. Архивировано из оригинала 30 июня 2018 г. Проверено 21 июня 2018 г.
- ^ Абдоллахи, Ходжат; Моллахоссейни, Али; Лейн, Джош Т.; Махур, Мохаммад Х. (ноябрь 2017 г.). Пилотное исследование по использованию интеллектуального робота, похожего на живого человека, в качестве компаньона для пожилых людей, страдающих деменцией и депрессией . 2017 17-я Международная конференция IEEE-RAS по гуманоидной робототехнике (гуманоиды). стр. 541–546. arXiv : 1712.02881 . Бибкод : 2017arXiv171202881A . дои : 10.1109/humanoids.2017.8246925 . ISBN 978-1-5386-4678-6 . S2CID 1962455 .
