Эта статья посвящена только одному специализированному аспекту предмета . Пожалуйста, помогите улучшить эту статью , добавив общую информацию и обсудив ее на странице обсуждения . ( февраль 2013 г. )
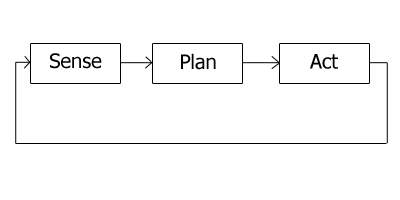
В робототехнике — робототехническая парадигма это мысленная модель того, как работает робот. Робототехническую парадигму можно описать взаимосвязью между тремя основными элементами робототехники : восприятием, планированием и действием . Это также можно описать тем, как сенсорные данные обрабатываются и распределяются по системе и где принимаются решения.
Эти связи представляют собой параллельные процессы, называемые поведениями, которые берут данные локального зондирования и вычисляют наилучшее действие независимо от того, что делают другие процессы.
Робот сначала планирует (обдумывает), как лучше всего разложить задачу на подзадачи (также называемое «планированием миссии»), а затем какое поведение подходит для выполнения каждой подзадачи.
Затем поведение начинает выполняться в соответствии с реактивной парадигмой.
Сенсорная организация также представляет собой смесь иерархического и реактивного стилей; Данные датчика перенаправляются на каждое поведение, которое нуждается в этом датчике, но также доступны планировщику для построения ориентированной на задачи глобальной модели мира.
Arc.Ask3.Ru Номер скриншота №: 66e5c7294cf9d2087c191e6e1aeb452b__1641724800 URL1:https://arc.ask3.ru/arc/aa/66/2b/66e5c7294cf9d2087c191e6e1aeb452b.html Заголовок, (Title) документа по адресу, URL1: Robotic paradigm - Wikipedia
Данный printscreen веб страницы (снимок веб страницы, скриншот веб страницы), визуально-программная копия документа расположенного по адресу URL1 и сохраненная в файл, имеет: квалифицированную, усовершенствованную (подтверждены: метки времени, валидность сертификата), открепленную ЭЦП (приложена к данному файлу), что может быть использовано для подтверждения содержания и факта существования документа в этот момент времени. Права на данный скриншот принадлежат администрации Ask3.ru, использование в качестве доказательства только с письменного разрешения правообладателя скриншота. Администрация Ask3.ru не несет ответственности за информацию размещенную на данном скриншоте. Права на прочие зарегистрированные элементы любого права, изображенные на снимках принадлежат их владельцам. Качество перевода предоставляется как есть. Любые претензии, иски не могут быть предъявлены. Если вы не согласны с любым пунктом перечисленным выше, вы не можете использовать данный сайт и информация размещенную на нем (сайте/странице), немедленно покиньте данный сайт. В случае нарушения любого пункта перечисленного выше, штраф 55! (Пятьдесят пять факториал, Денежную единицу (имеющую самостоятельную стоимость) можете выбрать самостоятельно, выплаичвается товарами в течение 7 дней с момента нарушения.)