ШКАЛА
Эту статью , возможно, придется переписать, Википедии чтобы она соответствовала стандартам качества . ( март 2021 г. ) |


SCARA — это тип промышленного робота . Эта аббревиатура расшифровывается как « Рука робота с селективной сборкой соответствия». [1] или шарнирно-сочлененная рука робота с селективным соответствием . [2]
Благодаря расположению суставов SCARA с параллельными осями, рычаг слегка податлив в направлении XY, но жесткий в направлении Z, отсюда и термин «селективная податливость» . Это выгодно при многих видах сборочных операций, например, при вставке круглого штифта в круглое отверстие без заедания.
Второй особенностью SCARA является сочлененная двухрычажная конструкция руки, аналогичная человеческой руке , отсюда и часто используемый термин «сочлененный» . Эта функция позволяет руке выдвигаться в ограниченные области, а затем втягиваться или «складываться» в сторону. Это выгодно для перемещения деталей из одной ячейки в другую или для загрузки или разгрузки закрытых технологических станций.
SCARA обычно работают быстрее, чем сопоставимые декартовы робототехнические системы. Их единственное крепление на пьедестале занимает небольшую площадь и обеспечивает простой и беспрепятственный монтаж. С другой стороны, SCARA могут быть дороже, чем сопоставимые декартовы системы, а управляющее программное обеспечение требует обратной кинематики для линейных интерполированных перемещений. Однако это программное обеспечение обычно поставляется вместе со SCARA и обычно прозрачно для конечного пользователя. [ нужна ссылка ]
Sankyo Seiki , Pentel и NEC представили робота SCARA как совершенно новую концепцию сборочных роботов в 1981 году. Робот был разработан под руководством Хироши Макино , [3] профессор Университета Яманаси . [2] Его рычаг был жестким по оси Z и податливым по осям XY, что позволяло ему адаптироваться к отверстиям по осям XY. [4] [5]
Галерея
[ редактировать ]Источник: [6]
 Рисунок из патента JPS55112789A Х. Макино.
Рисунок из патента JPS55112789A Х. Макино.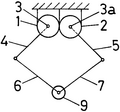 Рисунок из патента US4341502 Х. Макино.
Рисунок из патента US4341502 Х. Макино. Обратная кинематика серийного робота SCARA
Обратная кинематика серийного робота SCARA Обратная кинематика серийного робота SCARA
Обратная кинематика серийного робота SCARA Обратная кинематика параллельного робота SCARA
Обратная кинематика параллельного робота SCARA Обратная кинематика параллельной SCARA
Обратная кинематика параллельной SCARA









См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ «Роботы SCARA – Фанук» . www.fanuc.eu . Проверено 27 мая 2021 г.
- ^ Перейти обратно: а б «Зал славы роботов – при поддержке Университета Карнеги-Меллон» . www.robotalloffame.org . Проверено 27 мая 2021 г.
- ^ Ву, Гуанглей; Шэнь, Хуэйпин (08 августа 2020 г.). Параллельные PnP-роботы: параметрическое моделирование, оценка производительности и оптимизация конструкции . Спрингер Природа. ISBN 978-981-15-6671-4 .
- ^ Сборочный робот, патент США. 4 341 502 https://docs.google.com/viewer?url=patentimages.storage.googleapis.com/pdfs/US4341502.pdf
- ^ Вестерланд, Ларс (2000). Вытянутая рука человека. История промышленного робота . ISBN 91-7736-467-8 .
- ^ Симионеску, Пенсильвания (2014). Инструменты компьютерного построения графиков и моделирования для пользователей AutoCAD (1-е изд.). Бока-Ратон, Флорида: CRC Press. ISBN 978-1-4822-5290-3 .
Внешние ссылки
[ редактировать ]- Почему СКАРА? Практический пример — сравнение 3-осевого робота r-theta с 4-осевым роботом SCARA от Innovative Robotics, подразделения Ocean Bay and Lake Company.
| Основные статьи |  | |
|---|---|---|
| Типы | ||
| Классификации | ||
| Передвижение | ||
| Навигация и картографирование | ||
| Исследовать | ||
| Компании |
| |
| Связанный | ||