Аполлон PGNCS



«Аполлона» Основная система наведения, навигации и управления ( PGNCS , произносится «пингс» ) представляла собой автономную инерциальную систему наведения , которая позволяла космическому кораблю «Аполлон» выполнять свои миссии, когда связь с Землей была прервана, либо, как и ожидалось, когда космический корабль находился позади Луна, или в случае сбоя связи. Аполлона Командный модуль (CM) и лунный модуль (LM) были оснащены версией PGNCS. PGNCS и, в частности, его компьютер также были командным центром для всех входных данных системы от LM, включая юстировочный оптический телескоп , радиолокационную систему, входные данные устройства ручного перемещения и вращения астронавтов, а также другие входные данные от систем LM.
PGNCS была разработана Лабораторией приборостроения Массачусетского технологического института под руководством Чарльза Старка Дрейпера (позже Лаборатория приборов была названа в его честь). Генеральным подрядчиком PGNCS и производителем инерциального измерительного блока (IMU) выступило подразделение Delco компании General Motors . PGNCS состоял из следующих компонентов:
- инерциальный измерительный блок (IMU)
- Компьютер управления Apollo (AGC)
- резольверы для преобразования углов инерционной платформы в сигналы, используемые для сервоуправления
- оптические блоки, один для CM, другой для LM
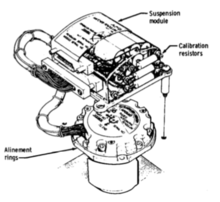
- механическая рама, называемая навигационной базой (или навигационной базой), для жесткого соединения оптических приборов и, в LM, радара встречи с IMU
- программное обеспечение AGC
Версии
[ редактировать ]
КМ и ЛМ использовали один и тот же компьютер, инерциальную платформу и резольверы. Главным отличием был оптический блок. Навигационная база также была разной для каждого космического корабля, что отражало различную геометрию установки. встречи LM Радар также был подключен к его навигационной базе.
Существовали две версии PGNCS — Block I и Block II, соответствующие двум поколениям CM. После пожара на Аполлоне-1 , который произошел в блоке I CM, НАСА решило, что никакие дальнейшие миссии с экипажем не будут использовать Блок I, хотя миссии без экипажа использовали. Основные различия между Block I и Block II PGNCS включали замену электромеханических резольверов полностью электронной конструкцией и замену навигационной базы Block I, изготовленной из бериллия , рамой, построенной из алюминиевых трубок, заполненных пеной из полиуретана . Навигационные базы Block II были легче, дешевле и столь же прочными.
Еще одним важным различием между Блоком I и Блоком II была ремонтопригодность. Первоначальной целью программы «Аполлон» было предоставить астронавтам возможность ремонтировать электронику. Соответственно, Block 1 PNGCS был спроектирован с множеством идентичных модулей, которые при необходимости можно было заменить запасными в полете. Однако условия повышенной влажности внутри отсеков экипажа и аварии при обращении с биологическими жидкостями во время миссии «Джемини-7» сделали нежелательным разгерметизацию электрических соединений. В Блоке II устранена задача ремонтопригодности, все агрегаты и электрические соединения опломбированы. [1] Фатальный пожар на Аполлоне-1 усилил эту обеспокоенность.
Инерционная единица измерения
[ редактировать ]
ИДУ был подвешен на трех осях. Самая внутренняя часть, стабильный элемент (СМ), представляла собой 6-дюймовый бериллиевый куб, в котором были установлены три гироскопа и три акселерометра . В контурах обратной связи сигналы от гироскопов использовались через резольверы для управления двигателями на каждой оси. Эта сервосистема удерживала стабильный элемент фиксированным относительно инерциального пространства . Затем сигналы акселерометров были интегрированы для отслеживания скорости и положения космического корабля. IMU был создан на основе системы наведения, разработанной Дрейпером для ракеты Polaris .
Инерциальные системы наведения не идеальны, и система Аполлона смещалась примерно на один миллирадиан в час. Поэтому приходилось периодически перенастраивать инерциальную платформу, визируя по звездам.
Оптические блоки
[ редактировать ]

Оптический блок CM имел прецизионный секстант (SXT), прикрепленный к рамке IMU, который мог измерять углы между звездами и ориентирами Земли или Луны или горизонтом. Он имел две линии обзора, 28-кратное увеличение и поле зрения 1,8°. Оптический блок также включал в себя сканирующий телескоп с широким полем зрения (60 °) с малым увеличением для наблюдения за звездами. Оптический блок можно было использовать для определения положения и ориентации СМ в пространстве.

Вместо этого у LM был юстировочный оптический телескоп (AOT), по сути перископ. Внешний элемент AOT представлял собой солнцезащитную призму, которую можно было поворачивать в одно из шести фиксированных положений относительно LM, чтобы охватить большую часть лунного неба. Каждая позиция имела поле зрения 60°. При вращении положение AOT считывалось АРУ; наведя прицел на две разные звезды, компьютер мог определить ориентацию корабля. [2]
Пилот командного модуля «Аполлона-11» Майкл Коллинз отметил, что видимость через оптику была некачественной, и в определенных условиях освещения было трудно что-то увидеть.
Солнцезащитный козырек был добавлен в конце программы, в 1967 году, после того, как испытания и моделирование показали, что астронавты, возможно, не смогут видеть звезды на поверхности Луны из-за прямого солнечного света или света, рассеянного близлежащими частями LM, падающими на лунную поверхность. внешняя призма. Добавление солнцезащитного козырька также позволило увеличить количество позиций обзора с трех до шести. [1] : с. 41 и далее

Программное обеспечение
[ редактировать ]Бортовое программное обеспечение наведения использовало фильтр Калмана для объединения новых данных с прошлыми измерениями положения и получения оптимальной оценки положения космического корабля. Ключевой информацией было преобразование координат между стабильным членом IMU и базовой системой координат. На жаргоне программы Apollo эта матрица была известна как REFSMMAT (что означает «ссылка на матрицу стабильных элементов»). В зависимости от этапа миссии использовались две опорные системы координат: одна с центром на Земле и одна с центром на Луне.
Навигационная информация
[ редактировать ]Несмотря на слово «первичные» в названии, данные PGNCS не были основным источником навигационной информации. НАСА Данные отслеживания из сети дальнего космоса обрабатывались компьютерами Центра управления полетами с использованием наименьших квадратов алгоритмов . Полученные оценки положения и скорости были более точными, чем оценки, полученные PGNCS. В результате астронавтам периодически предоставлялись обновления вектора состояния для входа в AGC на основе наземных данных. PGNCS по-прежнему была необходима для поддержания ориентации космического корабля, для управления ракетами во время маневрирования, включая посадку и взлет на Луну, а также в качестве основного источника навигационных данных во время плановых и неожиданных сбоев связи. PGNCS также предоставила проверку наземных данных.
Лунный модуль имел третье средство навигации — систему аварийного наведения (АГС), построенную компанией TRW . Это должно было использоваться в случае отказа PGNCS. АГС можно было использовать для взлета с Луны и встречи с командным модулем, но не для посадки. Во время Аполлона-13 , после наиболее серьезного пожара возле Луны, вместо PGNCS использовался AGS, поскольку он требовал меньше электроэнергии и охлаждающей воды.
Аполлон-11
[ редактировать ]Во время миссии «Аполлон-11» два сигнала тревоги PGNCS (1201 «Нет доступных зон VAC» и 1202 «Исполнительная сигнализация, нет основных комплектов») были переданы в центр управления полетом, когда 20 июля 1969 года была предпринята первая попытка посадки на Луну. Компьютерная система перегрузка была вызвана одновременным захватом радиолокационных данных посадки и радиолокационных данных сближения. Вспомогательный персонал Центра управления миссией пришел к выводу, что сигналы тревоги можно безопасно игнорировать, и приземление прошло успешно. [3] [4]
См. также
[ редактировать ]- Приборный блок «Сатурн-5» — система наведения, используемая ракетами-носителями «Аполлон».
Ссылки
[ редактировать ]- ^ Jump up to: а б Холли, доктор медицины (май 1976 г.). «Отчет об опыте Аполлона - Системы наведения и управления: Разработка первичной системы наведения и управления, НАСА TN D-8287» (PDF) . Космический центр Линдона Б. Джонсона, США. Национальное управление по аэронавтике и исследованию космического пространства.
- ^ Оптический телескоп для выравнивания лунного модуля Аполлона , Журнал лунной поверхности Аполлона
- ^ Эйлс, Дон (6 февраля 2004 г.), Tales from the Lunar Module Guidance Computer , получено 1 октября 2017 г.
- ^ «Журнал лунной поверхности Аполлона-11: Программные сигналы» . www.hq.nasa.gov . Проверено 16 апреля 2017 г.
| Ракеты-носители | |
|---|---|
| Ракета-носитель компоненты | |
| Космический корабль | |
| Космический корабль компоненты |
|
| Космические костюмы | |
| Лунная поверхность оборудование |
|
| Наземная поддержка | |
| Церемониальный | |
| Связанный | |