Лунный вездеход
| Лунный вездеход | |
|---|---|
 | |
| Обзор | |
| Производитель | |
| Также называется |
|
| Дизайнер | |
| Силовой агрегат | |
| Электродвигатель | Четыре мощностью 0,25 л.с. (0,19 кВт) с последовательной обмоткой. двигателя постоянного тока |
| Передача инфекции | 80:1 Четыре гармонических привода |
| Батарея | Два оксида серебра , 121 А·ч |
| Диапазон | 57 миль (92 км) |
| Размеры | |
| Колесная база | 7,5 футов (2,3 м) |
| Длина | 10 футов (3,0 м) |
| Высота | 3,6 футов (1,1 м) |
| Снаряженная масса |
|
| Хронология | |
| Преемник | Лунный вездеход |
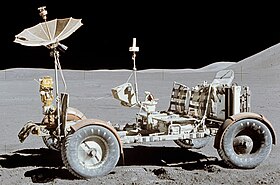
Лунный вездеход ( LRV ) — с батарейным питанием, четырехколесный вездеход использовавшийся на Луне в последних трех миссиях американской программы «Аполлон» ( 15 , 16 и 17 ) в 1971 и 1972 годах. В народе его называют луноходом. , игра на термине « багги для дюн ».
Каждая LRV, построенная компанией Boeing, без полезной нагрузки имеет массу 462 фунта (210 кг). Он мог нести максимальную полезную нагрузку 970 фунтов (440 кг), включая двух астронавтов, оборудование и груз, такой как лунные образцы, и был рассчитан на максимальную скорость 6 миль в час (9,7 км/ч), хотя достигал максимальной скорости 6 миль в час (9,7 км/ч). максимальная скорость 11,2 миль в час (18,0 км/ч) во время его последней миссии «Аполлон-17» .
Каждую LRV доставили на Луну в сложенном виде в отсеке квадранта 1 лунного модуля . После распаковки каждый проехал в среднем 30 км без серьезных происшествий. Эти три LRV остаются на Луне.
История
[ редактировать ]Концепция лунохода опубликовали серию статей Collier's Weekly предшествовала «Аполлону», и в журнале в 1952–1954 годах Вернер фон Браун и другие « Человек скоро покорит космос! ». В ней фон Браун описал шестинедельное пребывание на Луне, в котором участвовал 10-тонные тягачи-прицепы для перевозки грузов.
В 1956 году Мечислав Г. Беккер опубликовал две книги о передвижении по суше. [1] в то время как он был профессором Мичиганского университета и консультантом Лаборатории наземного передвижения танкового командования армии США . Книги предоставили большую часть теоретической основы для будущей разработки лунных транспортных средств.
В 1959 году Георг фон Тизенхаузен задумал луноход. [2] [3] как полноприводное транспортное средство с ненакачанными гибкими колесами. [4]
Ранние исследования лунной подвижности
[ редактировать ]В февральском номере журнала Popular Science за 1964 год фон Браун, тогдашний директор Маршалла (MSFC) НАСА им. Центра космических полетов , обсудил необходимость создания лунного надводного корабля и сообщил, что исследования велись в Маршалле совместно с Локхид, Бендикс. , Boeing, General Motors, Brown Engineering, Grumman и Bell Aerospace. [5] Саверио Мореа был назначен менеджером по LRV в MSFC в 1961 году. [4]

Начиная с начала 1960-х годов под руководством Маршалла была проведена серия исследований, посвященных лунной мобильности. Это началось с лунной логистической системы (LLS), за которой последовала мобильная лаборатория (MOLAB), затем лунный модуль научных исследований (LSSM) и, наконец, испытательный модуль мобильности (MTA). При первоначальном планировании программы «Аполлон» предполагалось, что для каждой лунной миссии будут использоваться две ракеты-носителя «Сатурн-5» : одна для отправки экипажа на борту лунного поверхностного модуля (LSM) на лунную орбиту, посадки и возвращения, а также другая. второй за отправку LSM-Truck (LSM-T) со всем оборудованием, припасами и транспортным средством для использования экипажем на поверхности. Все первые исследования Маршалла основывались на предположении о двойном запуске, позволяющем создать большой, тяжелый передвижной аппарат. [6]
Осенью 1962 года Грумман и Нортроп начали проектировать автомобили с герметичной кабиной и электродвигателями на каждом колесе. Примерно в это же время Bendix и Boeing начали внутренние исследования лунных транспортных систем. Мечислав Беккер , сейчас работающий в оборонных исследовательских лабораториях General Motors в Санта-Барбаре, штат Калифорния , завершал исследование для Лаборатории реактивного движения НАСА на небольшом беспилотном лунном вездеходе для программы Surveyor . Ференц Павлич , родом из Венгрии , использовал конструкцию из проволочной сетки для «упругих колес», конструкцию, которой будут следовать в будущих небольших марсоходах. [7]
В начале 1963 года НАСА выбрало Маршалла для исследования системы логистической поддержки Apollo (ALSS). После анализа всех предыдущих усилий был составлен 10-томный отчет. Включена потребность в герметичном транспортном средстве массой 6 490–8 470 фунтов (2 940–3 840 кг), вмещающем двух человек с их расходными материалами и инструментами для походов продолжительностью до двух недель. В июне 1964 года Маршалл заключил контракты с Bendix и Boeing, при этом лаборатория GM была назначена субподрядчиком в области автомобильных технологий. [8] Bell Aerospace уже заключила контракт на исследования лунных летающих аппаратов. [9]
Пока продолжались исследования Bendix и Boeing, Маршалл рассматривал менее амбициозную деятельность по исследованию поверхности — LSSM. Он будет состоять из стационарного обитаемого убежища-лаборатории с небольшим транспортным средством для перемещения по Луне, которое может перевозить одного человека или управляться дистанционно. Эта миссия по-прежнему потребует двойного запуска лунного корабля на «луноном грузовике». [10] Лаборатория двигателестроения и транспортных средств Маршалла (P&VE) заключила контракт с Hayes International на предварительное исследование убежища и связанного с ним транспортного средства. [11] Из-за потенциальной необходимости в закрытом аппарате для будущих расширенных исследований Луны эти проектные работы продолжались в течение некоторого времени и привели к созданию нескольких полномасштабных испытательных аппаратов.
Под давлением Конгресса с требованием снизить расходы на «Аполлон» производство «Сатурна-5» было сокращено, что позволило осуществлять только один запуск на миссию. Любой вездеход должен был бы поместиться в том же лунном модуле, что и астронавты. В ноябре 1964 года производство двухракетных моделей было приостановлено на неопределенный срок, но Bendix и Boeing получили контракты на исследование небольших марсоходов. Название лунного экскурсионного модуля было изменено на просто « лунный модуль» , что указывает на то, что возможность проведения «экскурсий» с электроприводом за пределы базы лунного корабля еще не существовала. Передвижной лаборатории быть не могло — астронавты работали бы в ЛМ. Маршалл также продолжал исследовать беспилотные роботизированные вездеходы, которыми можно было бы управлять с Земли.
С самого начала в Маршалле компания Brown Engineering Company из Хантсвилля, штат Алабама , участвовала во всех проектах по лунной мобильности. В 1965 году Браун стал главным подрядчиком лаборатории P&VE Маршалла. Поскольку возникла острая необходимость определить возможность создания автономного посадочного модуля для двух человек, фон Браун обошёл обычный процесс закупок и поручил отделу перспективных исследований P&VE непосредственно поручить Брауну спроектировать, построить и испытать прототип транспортного средства. [12] В то время как Bendix и Boeing продолжали совершенствовать концепции и конструкции посадочного модуля, испытательные модели марсоходов были жизненно важны для исследований человеческого фактора Marshall, в которых участвовали астронавты в скафандрах, взаимодействующие с силовым, телеметрическим, навигационным и жизнеобеспечивающим оборудованием вездехода.
Команда Брауна в полной мере использовала предыдущие исследования небольших вездеходов и везде, где это было возможно, использовала коммерчески доступные компоненты. Выбор колес имел большое значение, а о лунной поверхности в то время почти ничего не было известно. Лаборатория космических наук Маршалла (SSL) отвечала за прогнозирование свойств поверхности, а Браун также был главным подрядчиком по поддержке этой лаборатории; Браун создал испытательную площадку для изучения самых разных условий поверхности колес. Для имитации «эластичного колеса» Павлика использовалась камера диаметром четыре фута, обернутая нейлоновым лыжным тросом. На небольшом испытательном вездеходе каждое колесо было оснащено небольшим электродвигателем, а общая мощность обеспечивалась стандартными аккумуляторами грузовика. Защитная дуга защищала от опрокидывания.
В начале 1966 года машина Брауна стала доступна для изучения человеческого фактора и других испытаний. Маршалл построил небольшой испытательный трек с кратерами и обломками камней, где сравнивалось несколько различных макетов; стало очевидно, что для предложенных миссий лучше всего подойдет небольшой вездеход. Испытательный автомобиль также управлялся в дистанционном режиме, чтобы определить характеристики, которые могут быть опасны для водителя, такие как ускорение, высота отскока и склонность к перевороту, когда он двигался на более высоких скоростях и преодолевал моделируемые препятствия. Характеристики испытательного вездехода при силе тяжести в одну шестую были получены в ходе полетов на самолете KC-135A в маневре с пониженной гравитацией параболическом ; среди прочего была показана необходимость в очень мягкой комбинации колес и подвески. Хотя колеса Pavlics с проволочной сеткой изначально не были доступны для испытаний на пониженную гравитацию, колеса с проволочной сеткой были испытаны на различных почвах на Экспериментальной станции Waterways в Инженерного корпуса армии США Виксбурге , штат Миссисипи . Позже, когда колеса с проволочной сеткой были испытаны в полетах с низкой гравитацией, была обнаружена необходимость в крыльях колес для уменьшения загрязнения пылью. Модель также прошла всесторонние испытания в армии США. Испытательный полигон Юма в Аризоне , а также армейский полигон Абердин в Мэриленде .
Проект лунного вездехода
[ редактировать ]
В 1965 и 1967 годах Летняя конференция по исследованию Луны и науке собрала ведущих ученых, чтобы оценить планы НАСА по исследованию Луны и дать рекомендации. Одним из их выводов было то, что LSSM имеет решающее значение для успешной программы и ему следует уделять большое внимание. В Маршалле фон Браун создал оперативную группу по передвижению по Луне, а в мае 1969 года НАСА одобрило программу пилотируемых лунных вездеходов в качестве разработки аппаратного обеспечения Маршалла. Проект возглавил Эберхард Рис , директор по исследованиям и разработкам Marshall, который курировал проектирование и строительство марсохода. [13] [14] Саверио Мореа выступает в качестве менеджера проекта. [4]
11 июля 1969 года, незадолго до успешной высадки «Аполлона-11» на Луну , запрос предложений Маршалл опубликовал на окончательную разработку и строительство Аполлона LRV. Предложения представили Boeing, Bendix, Grumman и Chrysler. После трех месяцев оценки предложения и переговоров 28 октября 1969 года компания Boeing была выбрана генеральным подрядчиком Apollo LRV. Компания Boeing будет управлять проектом LRV под руководством Генри Кудиша в Хантсвилле, штат Алабама . В следующем, 1970 году, Кудиша сменил менеджер проекта LRV Эрл Хаутц. В качестве основного субподрядчика оборонные исследовательские лаборатории General Motors в Санта-Барбаре, Калифорния , поставят систему мобильности (колеса, двигатели и подвеску); эти усилия будут возглавлять менеджер программы GM Сэмюэл Романо и [15] Ференц Павлич . [16] Компания Boeing в Сиэтле, штат Вашингтон , будет поставлять электронику и навигационную систему. Испытания автомобиля будут проходить на заводе Boeing в Кенте, штат Вашингтон , а производство шасси и общая сборка будут осуществляться на заводе Boeing в Хантсвилле. [17]

Первый контракт с Boeing на сумму 19 000 000 долларов США предусматривал поставку первого LRV к 1 апреля 1971 года. Однако перерасход средств привел к тому, что окончательная стоимость составила 38 000 000 долларов США, что было примерно столько же, сколько первоначальная оценка НАСА. . Было построено четыре лунохода, по одному для миссий Аполлона 15, 16 и 17; и один использовался на запасные части после отмены дальнейших миссий Аполлона . Были построены и другие модели LRV: статическая модель для помощи в проектировании человеческого фактора ; инженерная модель для проектирования и интеграции подсистем; две модели гравитации в одну шестую для отработки механизма развертывания; тренажер с одной гравитацией, который проинструктирует астронавтов по управлению марсоходом и позволит им попрактиковаться в управлении им; массовая модель для проверки влияния марсохода на конструкцию, баланс и управляемость LM; установка для вибрационных испытаний для изучения долговечности LRV и устойчивости к стартовым нагрузкам; и блок квалификационных испытаний для изучения интеграции всех подсистем LRV. [18] В статье Саверио Мореа подробно рассказывается о системе LRV и ее развитии. [19]

LRV использовались для большей наземной мобильности во время миссий Аполлона J-класса , Аполлона-15 , Аполлона-16 и Аполлона-17 . Впервые марсоход был использован 31 июля 1971 года во время миссии «Аполлон-15». [20] Это значительно расширило круг исследователей Луны. Предыдущие команды астронавтов были ограничены короткими расстояниями ходьбы вокруг места приземления из-за громоздкого скафандра, необходимого для поддержания жизни в лунной среде. Однако дальность действия была оперативно ограничена, чтобы оставаться в пределах пешей досягаемости от лунного модуля на случай, если марсоход выйдет из строя в любой момент. [21] Марсоходы были спроектированы с максимальной скоростью около 8 миль в час (13 км/ч), хотя Юджин Сернан зафиксировал максимальную скорость 11,2 миль в час (18,0 км/ч), что стало (неофициальным) рекордом наземной скорости на Луне. [22]
LRV был разработан всего за 17 месяцев и выполнил на Луне все свои функции без каких-либо серьезных аномалий. Ученый-астронавт Харрисон Шмитт с корабля «Аполлон-17» сказал: «Лунный вездеход оказался надежным, безопасным и гибким кораблем для исследования Луны, каким мы и ожидали. Без него основные научные открытия «Аполлона-15, 16 и 17» не были бы осуществлены. было бы возможно; и наше нынешнее понимание лунной эволюции было бы невозможно». [21]
У LRV возникли небольшие проблемы. Удлинитель заднего крыла (EVA) миссии на LRV Аполлона-16 был потерян во время второго выхода в открытый космос на станции 8, когда Джон Янг наткнулся на него, собираясь помочь Чарльзу Дьюку . Поднявшаяся из-под колеса пыль покрыла экипаж, пульт и средства связи. Это привело к высокой температуре батареи и, как следствие, к высокому энергопотреблению. О попытках ремонта не упоминалось.
Расширение крыла на Apollo 17 LRV сломалось, когда Юджин Сернан случайно ударил его рукояткой молотка. Сернан и Шмитт приклеили удлинитель на место, но из-за пыльных поверхностей лента не приклеилась, и удлинитель потерялся примерно через час езды, в результате чего астронавты покрылись пылью. Для их второго выхода в открытый космос заменили «крыло» с использованием некоторых карт выхода в открытый космос, изоленты и пары зажимов изнутри лунного модуля, которые номинально предназначались для подвижного верхнего света. Позже этот ремонт был отменен, чтобы зажимы можно было вынести внутрь для обратного запуска. Карты были доставлены обратно на Землю и теперь выставлены в Национальном музее авиации и космонавтики . На некоторых частях импровизированного крыла заметны следы пыли. [23] [24]

Цветной телекамерой, установленной в передней части LRV, можно было дистанционно управляться с помощью Mission Control как по осям панорамирования и наклона, так и по масштабированию. Это позволило гораздо лучше освещать выход в открытый космос по телевидению, чем предыдущие миссии. В каждой миссии по завершении пребывания астронавтов на поверхности командир отводил LRV на позицию подальше от лунного модуля, чтобы камера могла зафиксировать запуск взлетной ступени. Оператору камеры в Центре управления полетами было трудно рассчитать время различных задержек, чтобы ступень подъема LM была в кадре во время запуска. С третьей и последней попытки (Аполлон-17) запуск и подъем были успешно отслежены.
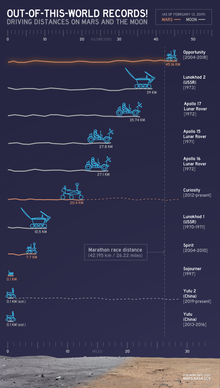
Оставшиеся марсоходы НАСА входят в число искусственных объектов на Луне , как и Советского Союза беспилотные марсоходы «Луноход-1» и «Луноход-2» .
Особенности и характеристики
[ редактировать ]
Лунный вездеход «Аполлон» — это аккумуляторный электромобиль, предназначенный для работы в вакууме Луны с низкой гравитацией и способный пересекать лунную поверхность, что позволяет астронавтам «Аполлона» расширять диапазон своей наземной внекорабельной деятельности. На Луне использовались три LRV: один на «Аполлоне-15» астронавты Дэвид Скотт и Джим Ирвин , один на «Аполлон-16» Джон Янг и Чарльз Дьюк и один на «Аполлон-17» Юджин Сернан и Харрисон Шмитт . Командир миссии выполнял функции водителя, занимая левое сиденье каждого LRV. Функции доступны в статьях Мореи, [19] Бейкер, [25] и Кудиш. [26]
Масса и полезная нагрузка
[ редактировать ]Лунные вездеходы имеют массу 460 фунтов (210 кг) и рассчитаны на дополнительную полезную нагрузку в 510 фунтов (230 кг). [18] примерно в одну шестую г В результате вес на лунной поверхности с весом составил 77 фунтов силы (35 кгс) пустого ( снаряжённая масса ) и 160 фунтов силы (73 кгс) полностью загруженного ( полная масса автомобиля ). Рама автомобиля имеет длину 10 футов (3,0 м) и колесную базу 7,5 футов (2,3 м). Высота транспортных средств составляет 3,6 фута (1,1 м). Каркас изготовлен из сварных трубок из алюминиевого сплава 2219 и состоит из трехчастного шасси, шарнирно закрепленного в центре, чтобы его можно было сложить и повесить в отсеке квадранта 1 лунного модуля, который оставался открытым из-за отсутствия внешняя панель обшивки. Они имеют два складных сиденья, расположенных рядом, из трубчатого алюминия с нейлоновой лямкой и алюминиевыми панелями пола. Между сиденьями был установлен подлокотник, каждое сиденье имело регулируемые подножки и ремень безопасности на липучке . Большая сетчатая антенна была установлена на мачте в передней части марсохода. Подвеска состоит из двойных горизонтальных поперечных рычагов с верхними и нижними торсионами и демпферного узла между шасси и верхним поперечным рычагом. При полной загрузке дорожный просвет LRV составляет 14 дюймов (36 см).
Колеса и мощность
[ редактировать ]
Колеса были разработаны и изготовлены лабораториями оборонных исследований General Motors в Санта-Барбаре, Калифорния . [27] Ференц Павлич получил особое признание НАСА за разработку «эластичного колеса». [28] Они состояли из алюминиевой ступицы и шины диаметром 32 дюйма (81 см) и шириной 9 дюймов (23 см), изготовленной из оцинкованных плетеных стальных прядей диаметром 0,033 дюйма (0,84 мм), прикрепленных к ободу. . Титановые шевроны покрывают 50% площади контакта, обеспечивая сцепление. Внутри шины находилась титановая рама отбойника диаметром 25,5 дюймов (65 см) для защиты ступицы. Над колесами были установлены пылезащитные кожухи. Каждое колесо имело собственный электропривод производства Delco: коллекторный электродвигатель постоянного тока мощностью 0,25 лошадиных сил (190 Вт) при 10 000 об/мин, прикрепленный к колесу через гармонический привод 80:1 , и механический тормозной блок. В случае отказа привода астронавты могли снять штифты, чтобы отсоединить привод от колеса, позволяя колесу свободно вращаться.
Маневренность обеспечивалась за счет использования передних и задних рулевых двигателей. Каждый рулевой двигатель постоянного тока с последовательной обмоткой имел мощность 0,1 лошадиной силы (75 Вт). Передние и задние колеса могли поворачиваться в противоположных направлениях для достижения минимального радиуса поворота 10 футов (3 м) или могли быть разъединены, чтобы для рулевого управления использовались только передние или задние колеса. Колеса были соединены с геометрией рулевого управления Аккермана , при которой внутренние шины имеют больший угол поворота, чем внешние, чтобы избежать бокового скольжения.
Питание обеспечивалось двумя 36-вольтовыми серебряно-цинковыми основе гидроксида калия, неперезаряжаемыми батареями на разработанными Eagle-Picher. [29] с зарядной емкостью 121 А·ч каждый (всего 242 А·ч), что обеспечивает запас хода 57 миль (92 км). [30] Они использовались для питания приводных и рулевых двигателей, а также 36-вольтовой розетки, установленной на передней части LRV, для питания блока реле связи или телекамеры. с изменяющейся фазой Батареи и электроника LRV пассивно охлаждались с использованием восковых термоконденсаторов и отражающих, обращенных вверх излучающих поверхностей. Во время движения радиаторы накрывали майларовыми чехлами, чтобы минимизировать скопление пыли. При остановке астронавты расстегивали одеяла и вручную удаляли лишнюю пыль с охлаждающихся поверхностей ручными щетками.
Управление и навигация
[ редактировать ]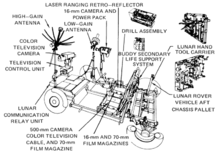

Т-образный ручной контроллер, расположенный между двумя сиденьями, управлял четырьмя приводными двигателями, двумя рулевыми двигателями и тормозами. Перемещение ручки вперед приводило LRV вперед, влево и вправо поворачивало машину влево или вправо, а движение назад активировало тормоза. Активация переключателя на ручке перед тем, как потянуть ее назад, приведет к переключению LRV на задний ход. Потянув ручку до упора назад, вы активировали стояночный тормоз. Модули управления и индикации располагались перед рукояткой и давали информацию о скорости, курсе, тангаже, а также уровнях мощности и температуры.
Навигация была основана на постоянной регистрации направления и расстояния с помощью гироскопа направления и одометра и передаче этих данных в компьютер, который отслеживал общее направление и расстояние до LM. Существовало также устройство солнечной тени, которое могло определять курс вручную в зависимости от направления Солнца, используя тот факт, что Солнце двигалось по небу очень медленно.
Использование
[ редактировать ]LRV использовался во время операций на поверхности Луны Аполлона-15, 16 и 17, миссий J программы Аполлон. В каждой миссии LRV использовался в трех отдельных выходах в открытый космос, в общей сложности совершив девять лунных путешествий или вылетов. Во время работы всегда управлял командир (ЦДР), а пилот лунного модуля (ЛМП) был пассажиром, помогавшим в навигации. [31] [32]
| Миссия | Общее расстояние | Общее время | Самый длинный одиночный ход | Максимальная дальность от LM |
|---|---|---|---|---|
| Аполлон-15 (LRV-1) | 17,25 миль (27,76 км) | 3 часа 02 минуты | 7,75 миль (12,47 км) | 3,1 мили (5,0 км) |
| Аполлон-16 (LRV-2) | 16,50 миль (26,55 км) | 3 часа 26 минут | 7,20 миль (11,59 км) | 2,8 мили (4,5 км) |
| Аполлон-17 (LRV-3) | 22,30 миль (35,89 км) | 4 часа 26 минут | 12,50 миль (20,12 км) | 4,7 миль (7,6 км) |
Операционное ограничение на использование LRV заключалось в том, что астронавты должны иметь возможность вернуться к LM, если LRV выйдет из строя в любой момент во время выхода в открытый космос (так называемый «предел обратного хода»). Таким образом, траверсы были ограничены по расстоянию, которое они могли пройти в начале и в любой момент позже при выходе в открытый космос. Поэтому они направились к самой дальней точке от LM и вернулись к ней, так что по мере того, как расходные материалы жизнеобеспечения были исчерпаны, оставшееся расстояние обратного пути также уменьшалось. Это ограничение было смягчено во время самого длинного похода Аполлона-17 на основе продемонстрированной надежности LRV и скафандров в предыдущих миссиях. В статье Беркхальтера и Шарпа подробно рассказывается об использовании. [33]
Развертывание
[ редактировать ]Размещение астронавтом лунного вездехода из открытого отсека LM 1 было достигнуто с помощью системы шкивов и тормозных барабанов с использованием веревок и тканевых лент. Ровер был сложен и хранился в отсеке нижней частью шасси наружу. Один астронавт должен был подняться по выходной лестнице на LM и освободить марсоход, который затем медленно наклонялся вторым астронавтом на земле с помощью катушек и лент. Поскольку марсоход был спущен из отсека, большая часть его развертывания была автоматической. Задние колеса развернулись и зафиксировались на месте. Когда они коснулись земли, передняя часть марсохода могла развернуться, колеса развернуться, а вся рама с помощью шкивов опуститься на поверхность. [34]
Компоненты марсохода фиксируются на месте при открытии. Затем кабели, штыри и штативы будут сняты, а сиденья и подножки подняты. После включения всей электроники автомобиль был готов отъехать от LM. [18]
Локации
[ редактировать ]Было изготовлено четыре готовых к полету LRV, а также несколько других для испытаний и тренировок. [18] Три из них были доставлены на Луну и оставлены на Луне в рамках миссий «Аполлон -15», «16» и «17» (LRV-1–3), а четвертый (LRV-4) использовался в качестве запасных частей для первых трех после отмены « Аполлона-18». [18] [35]
Ровер, использовавшийся на «Аполлоне-15», остался в Хэдли-Апеннинах ( 26°06′N 3°39′E / 26.10°N 3.65°E). The rover used on Apollo 16 was left at Descartes (8°59′S 15°31′E / 8.99°S 15.51°E). The rover used on Apollo 17 was left at Taurus-Littrow (20 ° 10'N 30 ° 46'E / 20,16 ° N 30,76 ° E ) и был замечен лунным разведывательным орбитальным аппаратом во время проходов в 2009 и 2011 годах. В 2020 году штат Вашингтон объявил летающие марсоходы историческими достопримечательностями. [36] [37]

Поскольку на лунную орбиту с поверхности могли вернуться только верхние ступени лунных экскурсионных модулей, аппараты вместе с нижними ступенями были заброшены. В результате на выставке представлены только луноходы LRV-4, испытательные машины, тренажеры и макеты. [18]
- Лунный вездеход 4 (LRV-4) [1] выставлен в комплексе для посетителей Космического центра Кеннеди на мысе Канаверал, Флорида .
- Инженерный макет [2] предназначен для проектирования и интеграции подсистем. [18] выставлен в Музее авиации в Сиэтле, штат Вашингтон . [38]
- Блок квалификационных испытаний [3] , предназначенный для изучения интеграции всех подсистем LRV, [18] выставлен в Национальном музее авиации и космонавтики в Вашингтоне, округ Колумбия. [39]
- Установка для испытаний на вибрацию [4] , предназначенная для изучения долговечности и устойчивости к стартовым нагрузкам. [18] выставлен в Центре Дэвидсона Сатурн V в Космическом и ракетном центре США в Хантсвилле, штат Алабама . [40] [41]
- Тренажер с гравитацией 1 [5] выставлен в Космическом центре Джонсона в Хьюстоне, штат Техас . [42]
Как упоминалось ранее, были построены дополнительные испытательные блоки, такие как статическая модель, две гравитационные модели 1/6 и массовая модель. [18]
- Лунные вездеходы, испытательные машины и тренажеры
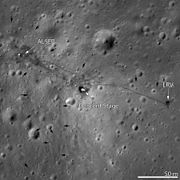 LRO Изображение места Аполлона-15 , LRV-1 находится у правого края.
LRO Изображение места Аполлона-15 , LRV-1 находится у правого края.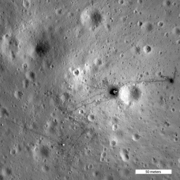 LRO Изображение места Аполлона-16 , LRV-2 находится у правого края.
LRO Изображение места Аполлона-16 , LRV-2 находится у правого края. LRO Изображение места Аполлона-17 , LRV-3 находится в правом нижнем углу.
LRO Изображение места Аполлона-17 , LRV-3 находится в правом нижнем углу. ЛРВ-4 , Комплекс посетителей КНЦ
ЛРВ-4 , Комплекс посетителей КНЦ Гравитационный тренажер LRV 1 , Космический центр Хьюстона
Гравитационный тренажер LRV 1 , Космический центр Хьюстона LRV Инженерный макет , Музей авиации
LRV Инженерный макет , Музей авиации LRV Установка вибрационных испытаний , Космический и ракетный центр США
LRV Установка вибрационных испытаний , Космический и ракетный центр США LRV Отделение квалификационных испытаний , Национальный музей авиации и космонавтики
LRV Отделение квалификационных испытаний , Национальный музей авиации и космонавтики








Реплики марсоходов выставлены в Космическом центре Джонсона в Хьюстоне, штат Техас , в Комплексе посетителей космического центра Кеннеди на мысе Канаверал, штат Флорида , в Национальном музее морской авиации в Пенсаколе, штат Флорида , в Музее авиации и космонавтики «Эвергрин» в Макминнвилле, штат Орегон . Канзасский космосферный и космический центр в Хатчинсоне, штат Канзас , и музей Омега в Биле, Швейцария . [43] Реплика, предоставленная Смитсоновским институтом, выставлена на аттракционе «Миссия: Космос» в Эпкоте на Всемирном курорте Уолта Диснея недалеко от Орландо, Флорида . [43] [44]
СМИ
[ редактировать ] (слева направо) Астронавты Джон Янг, Юджин Сернан, Чарльз Дюк, Фред Хейз, Энтони Ингланд, Чарльз Фуллертон и Дональд Петерсон ожидают испытаний квалификационного испытания лунного вездехода (LRV) в здании 4649 космического полета Маршалла. Центр (МСФК). Ноябрь 1971 года.
(слева направо) Астронавты Джон Янг, Юджин Сернан, Чарльз Дюк, Фред Хейз, Энтони Ингланд, Чарльз Фуллертон и Дональд Петерсон ожидают испытаний квалификационного испытания лунного вездехода (LRV) в здании 4649 космического полета Маршалла. Центр (МСФК). Ноябрь 1971 года.- Командир Аполлона-16 Джон Янг управляет лунным вездеходом 002
- Дэйв Скотт и Джим Ирвин тренируются на Земле, чтобы использовать луноход на Аполлоне-15.

См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Беккер, Мечислав Г.; Теория передвижения по суше , U. Michigan Press, 1956, и Механика передвижения транспортных средств , U. Michigan Press, 1956 и 1962.
- ^ «Интервью по устной истории Георга фон Тизенхаузена» (PDF) . НАСА.gov . 29 ноября 1988 года . Проверено 20 февраля 2024 г.
- ^ Руп, Ли (15 мая 2015 г.). «Георг фон Тизенхаузен, которому в понедельник исполнился 101 год, занимает место последнего члена немецкой ракетной команды» . АЛ.ком . Проверено 20 февраля 2024 г.
- ^ Перейти обратно: а б с Беркхалтер, Бетти Б.; Шарп, Митчелл Р. (1995). «Лунный вездеход: историческое происхождение, развитие и применение» (PDF) . НАСА.gov . Журнал Британского межпланетного общества . Проверено 20 февраля 2024 г.
- ^ фон Браун, Вернер; «Как мы будем путешествовать по Луне», Popular Science , февраль 1964 г., стр. 18–26.
- ^ Янг, Энтони; Лунные и планетарные вездеходы: колеса Аполлона и поиски Марса ; Спрингер, 2007, стр. 30–57; ISBN 0-387-30774-5
- ^ Беккер, Мечислав Г. и Ференц Павликс; «Концепция лунного вездехода: практический пример»; Документ штаба GMDRL SP63-205, май 1963 г.
- ^ «Молаб», Архивировано 12 октября 2011 г. в Wayback Machine . Энциклопедии космонавтики
- ^ Куртер, Роберт; «Что значит летать на реактивном поясе», Popular Science , ноябрь 1969 г., стр. 55–59, 190.
- ^ ССЫЛКА НА НОВОСТИ АПОЛЛОНА - ПРОИЗВОДНЫЕ ЛУННЫХ МОДУЛЕЙ ДЛЯ БУДУЩИХ КОСМИЧЕСКИХ МИССИЙ (PDF) . Грумман.
- ^ «Концептуальный проект и оценка лунного убежища/вездехода», НАСА CR-61049, ноябрь 1964 г.
- ^ «Браун создает концепцию лунного корабля», BECO Views , Vol. 9 января 1966 г., с. 1
- ^ «Доктор Эберхард Ф.М. Рис» . наэ.еду . Национальная инженерная академия . Проверено 20 февраля 2024 г.
- ^ «Эберхард Рис» . НАСА.gov . Проверено 20 февраля 2024 г.
- ^ От Луны до воздушного шара, Удивительная история авиации Нью-Джерси, HV Пэт Рейли, 1992 г.
- ^ Звезда, Адам. «Интервью с Ференцем Павличем, ведущим разработчиком луноходов «Аполлон»» . www.pulispace.com .
- ^ «Лунный вездеход», пресс-релиз MSFC, 29 октября 1969 г.; Маршалл Стар , 3 ноября 1969 г.
- ^ Перейти обратно: а б с д и ж г час я дж «Лунный вездеход «Аполлон» . НАСА . 15 ноября 2005 г. Проверено 16 мая 2010 г.
- ^ Перейти обратно: а б Мореа, Саверио Ф.; «Лунный вездеход – историческая перспектива» ; Учеб. 2-я конференция по лунным базам и космической деятельности, 5–7 апреля 1988 г.; Публикации конференции НАСА 3166, Vol. 1, стр. 619–632.
- ^ Бойл, Ребекка (27 июля 2021 г.). «50 лет назад НАСА отправило автомобиль на Луну» . Нью-Йорк Таймс . Проверено 30 июля 2021 г.
- ^ Перейти обратно: а б «Лунный вездеход «Аполлон» , документ НАСА.
- ^ Лайонс, Пит; «10 лучших машин, опережающих свое время», «Автомобиль и водитель» , январь 1988 г., стр.78.
- ^ Справочная публикация НАСА 1317, январь 1994 г., Салливан, Томас А. «Каталог экспериментальных операций Аполлона», стр. 68 «Экспериментальные операции во время выхода Аполлона в открытый космос: ремонт экспериментов», Документ НАСА.
- ^ «Лунная пыль и клейкая лента», Документ НАСА.
- ^ Бейкер, Дэвид; «Лунный вездеход: отчет о конструкции», Spaceflight , Vol. 13 июля 1971 г., стр. 234–240.
- ^ Кудиш, Генри. «Лунный вездеход». Космический полет . Том. 12 июля 1970 г., стр. 270–274.
- ^ «Лунный вездеход», брошюра, Delco Electronics, Санта-Барбара, 1972 г.
- ^ «Сертификат НАСА для Ференца Павлича за изобретение упругого колеса» (Венгерский инженерный университет).
- ^ «Пресс-кит Аполлона-15» (PDF) . 15 июля 1971 г. с. 96 . Проверено 28 октября 2022 г.
- ^ Янг, Энтони; Лунные и планетарные вездеходы: колеса Аполлона и поиски Марса ; Спрингер, 2007, с. 96; ISBN 0-387-30774-5
- ^ Джонс, Эрик. «Краткое содержание миссии Аполлона-15: Лунные горы» . Журнал лунной поверхности Аполлона .
- ^ Райли, Кристофер; Вудс, Дэвид; Доллинг, Филип (декабрь 2012 г.). Лунный вездеход: Руководство по ремонту . Хейнс . п. 165. ИСБН 9780857332677 .
- ^ Беркхальтер, Бетти Б; Шарп, Митчелл Р. (1995). «Лунный вездеход: историческое происхождение, развитие и применение». Журнал Британского межпланетного общества . 48 (5): 199–212.
- ^ «Как упаковали луноход «Аполлон»? — CollectSPACE: Сообщения» . www.collectspace.com . Проверено 15 февраля 2022 г.
- ^ «Полевой справочник по американским космическим кораблям | LRV № 4» . 6 мая 2012 года. Архивировано из оригинала 6 мая 2012 года . Проверено 24 мая 2023 г.
- ^ «Луноходы НАСА, построенные Боингом, получили статус достопримечательности штата Вашингтон» . GeekWire . 24 октября 2020 г. Проверено 12 мая 2021 г.
- ^ «Реестр наследия Вашингтона» . Штат Вашингтон . 23 октября 2020 г. Проверено 12 мая 2021 г.
- ^ «Полевой справочник по американским космическим кораблям | LRV» . 6 мая 2012 года. Архивировано из оригинала 6 мая 2012 года . Проверено 24 мая 2023 г.
- ^ «Полевой справочник по американским космическим кораблям | LRV» . 6 мая 2012 года. Архивировано из оригинала 6 мая 2012 года . Проверено 24 мая 2023 г.
- ^ «Полевой справочник по американским космическим кораблям | LRV» . 6 мая 2012 года. Архивировано из оригинала 6 мая 2012 года . Проверено 24 мая 2023 г.
- ^ «Лунный вездеход, установка для испытаний на вибрацию | Национальный музей авиации и космонавтики» . airandspace.si.edu . Проверено 24 мая 2023 г.
- ^ «Полевой справочник по американским космическим кораблям | LRV» . 6 мая 2012 года. Архивировано из оригинала 6 мая 2012 года . Проверено 24 мая 2023 г.
- ^ Перейти обратно: а б «Лунные вездеходы» . Полевое руководство по американским космическим кораблям . Архивировано из оригинала 8 августа 2011 года . Проверено 24 августа 2009 г.
- ^ «Старт миссии: КОСМОС» . Наука и техническая информация, Spinoff . НАСА. 2003. Архивировано из оригинала 22 октября 2003 года . Проверено 24 августа 2009 г.
Внешние ссылки
[ редактировать ]- Справочник по эксплуатации лунохода Boeing
- Статья о вездеходе
- Руководство по эксплуатации LRV, Приложение A (Рабочие данные)
- Мобильность лунного вездехода: наземные исследования – результаты Аполлона-15
- Лунный вездеход в рабочем видео
- Лунные и планетарные вездеходы: колеса Аполлона и поиски Марса
- Документация по лунному транспортному средству «Аполлон» - журнал Apollo Lunar Surface
- Лунный вездеход в Смитсоновском национальном музее авиации и космонавтики. Архивировано 8 февраля 2022 года в Wayback Machine.
- Коллекция лунных вездеходов, Архивы и специальные коллекции Университета Алабамы в Хантсвилле.
- Коллекция Рональда Ланкастера, Архивы и специальные коллекции Университета Алабамы в Хантсвилле. Коллекция фотографий и документов инженера, посвященных проектированию и конструкции LRV.
