Марсианский разведывательный орбитальный аппарат
 Mars Reconnaissance Orbiter Космический корабль | |
| Тип миссии | Марсианский орбитальный аппарат |
|---|---|
| Оператор | НАСА / Лаборатория реактивного движения |
| ИДЕНТИФИКАТОР КОСПЭРЭ | 2005-029А |
| САТКАТ нет. | 28788 |
| Веб-сайт | Марс в |
| Продолжительность миссии | 18 лет, 10 месяцев и 21 день с момента запуска (18 лет, 3 месяца и 23 дня (6511 сол ) на Марсе) |
| Свойства космического корабля | |
| Производитель | Lockheed Martin / Университет Аризоны / Лаборатория прикладной физики / Итальянское космическое агентство / Malin Space Science Systems |
| Стартовая масса | 2180 кг (4810 фунтов) [1] |
| Сухая масса | 1031 кг (2273 фунта) |
| Масса полезной нагрузки | 139 кг (306 фунтов) |
| Власть | 600–2000 Вт |
| Начало миссии | |
| Дата запуска | 12 августа 2005 г., 11:43:00 UTC |
| Ракета | Atlas V 401 |
| Запуск сайта | Мыс Канаверал SLC-41 |
| Подрядчик | Локхид Мартин |
| Орбитальные параметры | |
| Справочная система | Ареоцентрический |
| Режим | Солнечно-синхронный [2] |
| Наклон | 93 градуса [2] |
| Период | 111 минут |
| Марсианский орбитальный аппарат | |
| Орбитальное введение | 10 марта 2006 г., 21:24:00 UTC MSD 46990 12:48 AMT |
 Официальный знак Mars Reconnaissance Orbiter. миссии | |
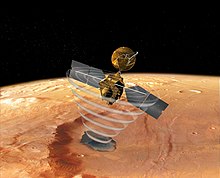
Mars Reconnaissance Orbiter ( MRO ) — космический корабль, предназначенный для поиска воды на Марсе и обеспечения поддержки миссий на Марс в рамках НАСА Марса программы исследования . Он был запущен с мыса Канаверал 12 августа 2005 г. в 11:43 UTC и достиг Марса 10 марта 2006 г. в 21:24 UTC. В ноябре 2006 года, после шести месяцев аэродинамического торможения , он вышел на свою последнюю научную орбиту и начал свою основную научную фазу.
Цели миссии включают наблюдение за климатом Марса , исследование геологических сил , обеспечение разведки будущих посадочных площадок и передачу данных наземных миссий обратно на Землю. Для достижения этих целей MRO оснащена различными научными приборами, в том числе тремя камерами, двумя спектрометрами и подземным радаром . По состоянию на 29 июля 2023 года MRO вернуло более 450 терабит данных, помогло выбрать безопасные места для посадки марсианских посадочных модулей НАСА , обнаружило чистый водяной лед в новых кратерах и предоставило дополнительные доказательства того, что вода когда-то текла на поверхности Марса. [3]
Космический корабль продолжает работать на Марсе, значительно превышая расчетный срок службы. Из-за своей решающей роли в качестве высокоскоростного ретранслятора данных для наземных миссий НАСА намерено продолжать миссию как можно дольше, по крайней мере, до конца 2020-х годов. По состоянию на 3 июля 2024 года MRO был активен на Марсе в течение 6511 солов , или 18 лет, 3 месяцев и 23 дня, и является третьим по продолжительности существования космическим кораблем на орбите Марса после Mars Odyssey и Mars Express 2001 года .
Предварительный запуск [ править ]
После неудач миссий Mars Climate Orbiter и Mars Polar Lander в 1999 году НАСА реорганизовало и перепланировало свою программу исследования Марса . В октябре 2000 года НАСА объявило о своих пересмотренных планах по Марсу, которые сократили количество запланированных миссий и ввели новую тему «Следуй за водой». В планы входил Mars Reconnaissance Orbiter ( MRO ) в 2005 году. запуск [4]
3 октября 2001 года НАСА выбрало Lockheed Martin в качестве основного подрядчика по изготовлению космического корабля. [5] К концу 2001 года все инструменты миссии были выбраны. не было серьезных неудач Во время строительства MRO космический корабль был отправлен в Космический центр Джона Ф. Кеннеди для подготовки его к запуску. , и 1 мая 2005 года [6]
Цели миссии [ править ]
MRO преследует как научные цели, так и цели «поддержки миссии». Первоначально планировалось, что основная научная миссия продлится с ноября 2006 г. по ноябрь 2008 г., а фаза поддержки миссии - с ноября 2006 г. по ноябрь 2010 г. Обе миссии были продлены. [7]
Формальными научными целями MRO являются наблюдения за нынешним климатом, особенно за его атмосферной циркуляцией и сезонными изменениями; искать признаки воды как в прошлом, так и в настоящем, и понимать, как она изменила поверхность планеты; составить карту и охарактеризовать геологические силы, сформировавшие поверхность. [8]
Для поддержки других миссий на Марс у MRO также есть цели по поддержке миссий. Они должны обеспечивать услуги ретрансляции данных от наземных миссий обратно на Землю, а также оценивать безопасность и осуществимость потенциальных будущих посадочных площадок и путешествий марсоходов . [8]
MRO сыграла ключевую роль в выборе безопасных мест посадки посадочного модуля Phoenix в 2008 году, марсианской научной лаборатории / марсохода Curiosity в 2012 году, посадочного модуля InSight в 2018 году и марсохода Mars 2020 / Perseverance в 2021 году. [9] [10] [11]
Запуск и выведение на орбиту [ править ]


12 августа 2005 года MRO был запущен на борту ракеты Atlas V-401 с космодрома 41 на станции ВВС на мысе Канаверал . [12] Верхняя ступень ракеты «Кентавр» 56 минут завершила горение за и вывела MRO на межпланетную переходную орбиту в направлении Марса. [13]
MRO путешествовал по межпланетному пространству семь с половиной месяцев, прежде чем достиг Марса. По пути большая часть научных инструментов и экспериментов была проверена и откалибрована . Чтобы обеспечить правильный выход на орбиту после достижения Марса, были запланированы четыре траектории маневра по коррекции и обсуждался пятый экстренный маневр. [14] Однако потребовалось всего три маневра коррекции траектории, что сэкономило 27 килограммов (60 фунтов) топлива, которое можно было бы использовать во время . расширенной миссии MRO [15]
MRO начал выход на орбиту, приблизившись к Марсу 10 марта 2006 г. и пройдя над его южным полушарием на высоте 370–400 километров (230–250 миль). Все шесть главных двигателей MRO работали 27 минут, замедляя зонд на 1000 метров в секунду (3300 футов/с). Сжигание было удивительно точным, поскольку маршрут введения был спроектирован более трех месяцев назад, а достигнутое изменение скорости всего на 0,01% меньше расчетного, что потребовало дополнительных 35 секунд времени горения. [16]
Завершение вывода на орбиту вывело орбитальный аппарат на высокоэллиптическую полярную орбиту с периодом примерно 35,5 часов. [17] Вскоре после запуска периапсис — точка на орбите, ближайшая к Марсу, — находился на расстоянии 426 км (265 миль) от поверхности. [17] (3806 км (2365 миль) от центра планеты). Апоапсис - точка на орбите , наиболее удаленная от Марса, - находилась на расстоянии 44 500 км (27 700 миль) от поверхности (47 972 км (29 808 миль) от центра планеты). [18]
Когда MRO вышла на орбиту, она присоединилась к пяти другим активным космическим кораблям, которые находились либо на орбите, либо на поверхности планеты: Mars Global Surveyor , Mars Express , 2001 Mars Odyssey и двум марсоходам исследования Марса ( «Spirit» и «Opportunity »). Это установило новый рекорд по количеству работоспособных космических кораблей в непосредственной близости от Марса. [19]
30 марта 2006 года MRO начал процесс аэроторможения — трехэтапную процедуру, которая вдвое сократила расход топлива, необходимый для достижения более низкой, более круговой орбиты с более коротким периодом. Во-первых, во время своих первых пяти витков вокруг планеты (одна земная неделя) MRO использовала свои двигатели, чтобы понизить перицентр своей орбиты до высоты аэроторможения. Во-вторых, используя свои двигатели для внесения незначительных корректировок в высоту перицентра, MRO поддерживал высоту аэродинамического торможения в течение 445 планетарных орбит (около пяти земных месяцев), чтобы уменьшить апоцентр орбиты до 450 километров (280 миль). Это было сделано таким образом, чтобы не слишком сильно нагревать космический корабль, но и достаточно погружаться в атмосферу, чтобы замедлить космический корабль. В-третьих, после того, как процесс был завершен, MRO использовала свои двигатели, чтобы вывести перицентр за пределы атмосферы 30 августа 2006 года. [20] [21] [22]
В сентябре 2006 года MRO еще дважды запустил свои двигатели, чтобы вывести свою последнюю, почти круговую орбиту на высоту примерно от 250 до 316 км (от 155 до 196 миль) над поверхностью с периодом около 112 минут. [23] [24] Антенны радара SHARAD были развернуты 16 сентября. Все научные инструменты были протестированы, и большинство из них было выключено перед соединением Солнца , которое произошло с 7 октября по 6 ноября 2006 года. Это было сделано для предотвращения помех от заряженных частиц Солнца. сигналами и потенциально подвергая опасности космический корабль. [25] После завершения соединения началась «фаза первичной науки». [26]
Хронология [ править ]


29 сентября 2006 г. ( 402 сол ) MRO получил первое изображение с высоким разрешением со своей научной орбиты. Говорят, что это изображение разрешает предметы размером до 90 см (3 фута) в диаметре. 6 октября НАСА опубликовало подробные фотографии MRO и кратера Виктория марсохода Оппортьюнити» « на краю над ним. [27] В ноябре начали проявляться проблемы в работе двух приборов космического корабля ТОиР . механизм Шаговый марсианского климатического эхолота (MCS) несколько раз давал сбои, в результате чего поле зрения было немного смещено. К декабрю нормальная работа прибора была приостановлена, хотя стратегия смягчения последствий позволяет прибору продолжать проводить большую часть запланированных наблюдений. [28] увеличение шума и, как следствие, появление плохих пикселей наблюдалось Кроме того, в нескольких ПЗС-матрицах в рамках научного эксперимента по созданию изображений с высоким разрешением (HiRISE) . Работа этой камеры с более длительным временем прогрева [а] облегчило проблему. Однако причина пока неизвестна и может вернуться. [30]
17 ноября 2006 г. НАСА объявило об успешных испытаниях MRO в качестве ретранслятора орбитальной связи. Используя марсоход НАСА Spirit в качестве отправной точки для передачи, MRO выступал в качестве ретранслятора для передачи данных обратно на Землю. [31] HiRISE удалось сфотографировать спускаемый аппарат «Феникс» во время его с парашютом спуска на Vastitas Borealis 25 мая 2008 года (990 сол). [32]
В 2009 году с орбитальным аппаратом продолжали возникать повторяющиеся проблемы, в том числе четыре самопроизвольных перезагрузки, кульминацией которых стало четырехмесячное отключение космического корабля с августа по декабрь. [33] Хотя инженеры не определили причину повторяющихся перезагрузок, они создали новое программное обеспечение, которое поможет устранить проблему, если она повторится. Еще одна спонтанная перезагрузка произошла в сентябре 2010 года. [34]
3 марта 2010 года MRO преодолел еще одну важную веху, передав обратно на Землю более 100 терабит данных, что больше, чем все другие межпланетные зонды, отправленные с Земли, вместе взятые. [35]
В декабре 2010 года началась первая расширенная миссия. Цели включали исследование сезонных процессов , поиск изменений поверхности и обеспечение поддержки других марсианских космических кораблей. Это продолжалось до октября 2012 года, после чего НАСА начало вторую расширенную миссию MRO , которая продлилась до октября 2014 года. [34] По состоянию на 2023 год MRO выполнило пять миссий и в настоящее время выполняет шестую. [36]
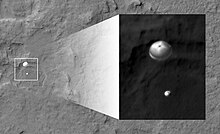
6 августа 2012 года (2483 сол) орбитальный аппарат пролетел над кратером Гейла , местом посадки миссии Марсианской научной лаборатории, во время фазы EDL . С помощью камеры HiRISE он сделал снимок Curiosity марсохода , спускающегося со своим корпусом и сверхзвуковым парашютом. [37] В декабре 2014 и апреле 2015 года Curiosity внутри кратера Гейла. аппарат HiRISE снова сфотографировал [38]
Еще одна компьютерная аномалия произошла 9 марта 2014 года, когда MRO перешла в безопасный режим после незапланированного переключения с одного компьютера на другой. возобновило MRO Четыре дня спустя нормальную научную деятельность. Это произошло снова 11 апреля 2015 года, после чего через неделю ТОиР вернулся к полной боевой готовности. [34]
НАСА сообщило, что MRO , [39] а также Mars Odyssey орбитальный аппарат [40] и MAVEN орбитальный аппарат [41] имел возможность изучить пролет кометы Сайдинг- Спринг 19 октября 2014 года. [42] [43] Чтобы свести к минимуму риск ущерба от материала, выброшенного кометой, MRO произвела корректировку орбиты 2 июля 2014 г. и 27 августа 2014 г. Во время пролета MRO сделал лучшие за всю историю фотографии кометы из облака Оорта и не был поврежден. [38]
В январе 2015 года MRO обнаружило и идентифицировало обломки британского самолета «Бигль-2» , который был потерян во время приземления в 2003 году и предположительно разбился. Изображения показали, что «Бигль-2» на самом деле благополучно приземлился, но одна или две его солнечные панели не смогли полностью раскрыться, что заблокировало радиоантенну. [38] [44] В октябре 2016 года место крушения еще одного потерянного космического корабля, Schiaparelli EDM , было сфотографировано MRO с использованием камер CTX и HiRISE. [38]
29 июля 2015 года MRO был выведен на новую орбиту для обеспечения коммуникационной поддержки во время ожидаемого прибытия спускаемого аппарата на Марс InSight в сентябре 2016 года. [45] Работа двигателя во время маневра продолжалась 75 секунд. [46] InSight был отложен и пропустил окно запуска 2016 года , но был успешно запущен в следующем окне 5 мая 2018 года и приземлился 26 ноября 2018 года. [47]
Из-за продолжительности миссии ряд компонентов MRO начал приходить в негодность. С начала миссии в 2005 по 2017 год MRO использовало миниатюрный инерциальный измерительный блок (MIMU) для контроля высоты и ориентации. После 58 000 часов использования и ограниченных признаков жизни орбитальный аппарат переключился на резервный, срок службы которого по состоянию на 2018 год достиг 52 000 часов. Чтобы сохранить срок службы резервной копии, в 2018 году НАСА перешло от MIMU к «всезвездному» режиму для рутинных операций. В «всезвездном» режиме используются камеры и программное обеспечение для распознавания образов для определения местоположения звезд, которое затем можно определить. используется для определения ориентации MRO . [48] Проблемы с размытием снимков с HiRISE и деградацией батареи также возникали в 2017 году, но с тех пор были решены. [49] В августе 2023 года электронные блоки датчика CCD RED4 HiRISE также начали выходить из строя, что приводит к появлению визуальных артефактов на сделанных снимках. [50]
В 2017 году криорефрижераторы, используемые CRISM, завершили свой жизненный цикл, ограничив возможности прибора видимыми длинами волн вместо полного диапазона длин волн. В 2022 году НАСА объявило о полном закрытии CRISM, а 3 апреля 2023 года инструмент был официально выведен из эксплуатации после создания двух окончательных, почти глобальных карт с использованием предыдущих данных и более ограниченного второго спектрометра, не требующего криорефрижераторов. [38] [51] [52]
Инструменты [ править ]





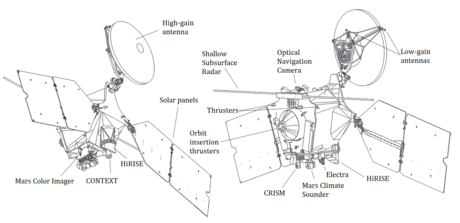
На орбитальном аппарате имеются три камеры, два спектрометра и радар, а также три инженерных прибора и два «научных эксперимента», которые используют данные инженерных подсистем для сбора научных данных. Два инженерных прибора используются для испытаний и демонстрации нового оборудования для будущих миссий. [53] MRO делает около 29 000 изображений в год. [54]
HiRISE [ править ]
диаметром 0,5 м (1 фут 8 дюймов) Камера научного эксперимента с изображением высокого разрешения (HiRISE) представляет собой телескоп-рефлектор , самый большой из когда-либо совершавшихся в дальнем космосе , и имеет разрешение 1 микрорадиан , или 0,3 м (1 фут 0 дюймов). с высоты 300 км (190 миль). Для сравнения, спутниковые изображения Земли обычно доступны с разрешением 0,5 м (1 фут 8 дюймов). [55] HiRISE собирает изображения в трех цветовых диапазонах: от 400 до 600 нм (сине-зеленый или B-G), от 550 до 850 нм (красный) и от 800 до 1000 нм ( ближний инфракрасный диапазон ). [56]
Изображения красного цвета имеют размер 20 264 пикселей в поперечнике (ширина 6 км (3,7 мили), а B – G и NIR — 4048 пикселей в поперечнике (ширина 1,2 км (0,75 мили)). орбитального аппарата Бортовой компьютер HiRISE считывает эти строки в соответствии с путевой скоростью , а длина изображений потенциально неограничена. Однако на практике их длина ограничена объемом памяти компьютера 28 ГБ , а номинальный максимальный размер составляет 20 000 × 40 000 пикселей (800 мегапикселей ) и 4 000 × 40 000 пикселей (160 мегапикселей) для изображений B – G и NIR. Каждое изображение размером 16,4 Гб сжимается до 5 Гб перед передачей и публикацией для широкой публики на веб-сайте HiRISE в формате JPEG 2000 . [24] [57] Чтобы облегчить картографирование потенциальных мест посадки, HiRISE может создавать стереопары изображений, на основе которых можно рассчитать топографию с точностью до 0,25 м (9,8 дюйма). [58] HiRISE был построен компанией Ball Aerospace & Technologies Corp. [59]
СТХ [ править ]
Контекстная камера (CTX) обеспечивает изображения в оттенках серого (от 500 до 800 нм) с разрешением пикселей примерно до 6 м (20 футов). CTX предназначен для предоставления контекстных карт для целевых наблюдений HiRISE и CRISM, а также используется для составления мозаики больших территорий Марса, мониторинга ряда мест на предмет изменений с течением времени и для получения стереофонического (3D) покрытия ключевых регионов и потенциальных будущие посадочные площадки. [60] [61] Оптика CTX состоит из с фокусным расстоянием телескопа Максутова Кассегрена 350 мм (14 дюймов) и ПЗС-матрицей с линейной матрицей шириной 5064 пикселя. Прибор делает снимки шириной 30 км (19 миль) и имеет достаточно внутренней памяти, чтобы сохранить изображение на длину 160 км (99 миль) перед загрузкой его в главный компьютер . [62] Камера была построена и эксплуатируется компанией Malin Space Science Systems . К марту 2017 года CTX нанесла на карту более 99% Марса и помогла создать интерактивную карту Марса в 2023 году. [63] [64]
МАРСИ [ править ]
Mars Color Imager (MARCI) — это широкоугольная камера с относительно низким разрешением, которая просматривает поверхность Марса в пяти видимых и двух ультрафиолетовых диапазонах. Каждый день MARCI собирает около 84 изображений и создает глобальную карту с разрешением пикселей от 1 до 10 км (от 0,62 до 6,21 мили). Эта карта предоставляет еженедельный прогноз погоды на Марсе, помогает охарактеризовать ее сезонные и годовые колебания, а также отображает наличие водяного пара и озона в его атмосфере. [65] Камера была построена и эксплуатируется компанией Malin Space Science Systems. Он оснащен объективом типа «рыбий глаз» с углом обзора 180 градусов и семью цветными фильтрами, прикрепленными непосредственно к одному ПЗС-датчику. [66] [67] Такая же камера MARCI была на борту Mars Climate Orbiter, запущенного в 1998 году. [68]
КРИСМ [ править ]
Компактный спектрометр разведывательной визуализации для Марса (CRISM) представляет собой видимого и ближнего инфракрасного диапазона спектрометр , который используется для создания подробных карт минералогии поверхности Марса. [69] Он работает в диапазоне от 362 до 3920 нм, измеряет спектр в 544 каналах (каждый шириной 6,55 нм) и имеет разрешение 18 м (59 футов) на высоте 300 км (190 миль). [69] [70] CRISM используется для идентификации минералов и химических веществ, свидетельствующих о существовании воды на поверхности Марса в прошлом или настоящем. Эти материалы включают оксиды железа , слоистые силикаты и карбонаты , которые имеют характерные закономерности в видимой инфракрасной энергии. [71] Инструмент CRISM был остановлен 3 апреля 2023 года. [51]
МКС [ править ]
Марсианский климатический эхолот (MCS) — это радиометр, который смотрит сквозь атмосферу как вниз, так и горизонтально, чтобы количественно оценить вертикальные изменения атмосферы . Он имеет один канал видимого/ближнего инфракрасного диапазона (от 0,3 до 3,0 мкм) и восемь каналов дальнего инфракрасного диапазона (от 12 до 50 мкм), выбранных для этой цели. MCS наблюдает за атмосферой на горизонте Марса (если смотреть с MRO), разбивая ее на вертикальные срезы и проводя измерения внутри каждого среза с шагом 5 км (3,1 мили). Эти измерения объединяются в ежедневные глобальные карты погоды, чтобы показать основные переменные марсианской погоды : температуру, давление, влажность и плотность пыли . [72] MCS весит примерно 9 кг (20 фунтов) и начал работу в ноябре 2006 года. [73] [74] С момента начала эксплуатации он помог создать карты мезосферных облаков. [75] изучать и классифицировать пыльные бури, [76] и предоставить прямые доказательства наличия снега из углекислого газа на Марсе. [77]
Этот прибор, предоставленный Лабораторией реактивного движения НАСА (JPL), представляет собой обновленную версию более тяжелого и крупного прибора, первоначально разработанного в JPL для миссий Mars Observer 1992 года и Mars Climate Orbiter 1998 года . [78] оба потерпели неудачу. [79]
ШАРАД [ править ]
Эксперимент с зондом Shallow Radar (SHARAD) на борту MRO предназначен для исследования внутренней структуры марсианских полярных ледяных шапок . Он также собирает по всей планете информацию о подземных слоях реголита , камня и льда , которые могут быть доступны с поверхности. SHARAD излучает ВЧ -радиоволны в диапазоне от 15 до 25 МГц — диапазон, который позволяет ему различать слои толщиной от 7 м (23 фута) до максимальной глубины 3 км (1,864 мили). Он имеет горизонтальное разрешение от 0,3 до 3 км (от 0,2 до 1,9 миль). [80] SHARAD предназначен для дополнения инструмента Mars Express MARSIS , который имеет более грубое разрешение, но проникает на гораздо большую глубину. И SHARAD, и MARSIS были созданы Итальянским космическим агентством . [81]
Инженерные приборы и эксперименты [ править ]
Помимо оборудования для визуализации, MRO имеет три инженерных инструмента. Пакет Electra связи УВЧ представляет собой программно-определяемую радиостанцию , которая обеспечивает гибкую платформу для развития возможностей ретрансляции. [82] Он предназначен для связи с другими космическими кораблями, когда они приближаются, приземляются и работают на Марсе. В дополнение к управляемым протоколом каналам передачи данных между космическими кораблями со скоростью от 1 кбит/с до 2 Мбит/с, Electra также обеспечивает сбор доплеровских данных, запись в разомкнутом контуре и высокоточную службу синхронизации на основе сверхстабильного генератора . [83] [84] Допплеровская информация о приближающихся транспортных средствах может использоваться для окончательного определения цели снижения или для воссоздания траектории снижения и приземления. Допплеровская информация о приземляемых аппаратах позволяет ученым точно определять местоположение на поверхности Марса спускаемых аппаратов и марсоходов. Два космических корабля Mars Exploration Rover (MER) использовали ретрансляционную радиостанцию UHF предыдущего поколения, обеспечивающую аналогичные функции через орбитальный аппарат Mars Odyssey. Радио «Электра» передало информацию на космический корабль MER, посадочный модуль «Феникс» и марсоход «Кьюриосити» и обратно . [85]
На этапе полета MRO также использовало K a пакет телекоммуникационных экспериментов в диапазоне , чтобы продемонстрировать менее энергоемкий способ связи с Землей. [87]
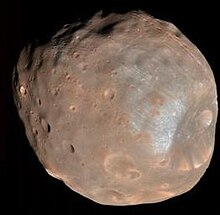
Оптическая навигационная камера отображает марсианские спутники Фобос и Деймос на фоне звезд, чтобы точно определить орбиту MRO . Хотя это и не критично, это было включено в качестве технологического испытания будущего вывода на орбиту и посадки космических кораблей. [88] Оптическая навигационная камера успешно прошла испытания в феврале и марте 2006 года. [89]
На космическом корабле также проводятся два дополнительных научных исследования. Пакет исследований гравитационного поля измеряет изменения марсианского гравитационного поля посредством изменений скорости космического корабля. Изменения скорости обнаруживаются путем измерения доплеровских сдвигов в MRO радиосигналах , принимаемых на Земле. Данные этого исследования могут быть использованы для понимания геологии недр Марса, определения плотности атмосферы и отслеживания сезонных изменений в расположении углекислого газа, отложившегося на поверхности. [90]
В исследовании структуры атмосферы использовались чувствительные бортовые акселерометры для определения на месте плотности атмосферы Марса во время аэроторможения. Измерения помогли лучше понять сезонные изменения ветра, влияние пыльных бурь и структуру атмосферы. [91]
Системы космических аппаратов [ править ]

Структура [ править ]
Рабочие компании Lockheed Martin Space Systems в Денвере собрали конструкцию космического корабля и прикрепили инструменты. Приборы были созданы в Лаборатории реактивного движения, Университета Аризоны Лунной и планетарной лаборатории в Тусоне, штат Аризона , Университета Джона Хопкинса Лаборатории прикладной физики в Лорел, штат Мэриленд , Итальянском космическом агентстве в Риме и компании Malin Space Science Systems в Сан-Диего. [92]
Конструкция выполнена в основном из углеродных композитов и алюминиево-сотовых пластин. Титановый топливный бак занимает большую часть объема и массы космического корабля и обеспечивает большую часть его структурной целостности . [93] Общая масса космического корабля составляет менее 2180 кг (4810 фунтов), а сухая масса без топлива - менее 1031 кг (2273 фунта). [94]
Энергетические системы [ править ]

MRO получает всю свою электроэнергию от двух солнечных панелей , каждая из которых может независимо перемещаться вокруг двух осей (вверх-вниз или вращение влево-вправо). Каждая солнечная панель имеет размеры 5,35 × 2,53 м (17,6 × 8,3 фута) и имеет длину 9,5 м. 2 (102 кв. фута), покрытый 3744 отдельными фотоэлектрическими элементами. [95] [83] Его высокоэффективные солнечные элементы способны преобразовывать более 26% энергии, получаемой от Солнца, непосредственно в электричество и соединяться вместе, чтобы производить общую мощность 32 вольта . Находясь на орбите Марса, панели вместе производят 600–2000 [б] ватты мощности; [96] [83] [8] напротив, панели будут генерировать 6000 Вт на сопоставимой околоземной орбите, находясь ближе к Солнцу. [95] [83]
У MRO есть две перезаряжаемые никель-водородные батареи, которые используются для питания космического корабля, когда он не обращен к Солнцу. Каждая батарея имеет емкость хранения энергии 50 ампер-часов (180 кК ). Полный диапазон батарей не может быть использован из-за ограничений по напряжению на космическом корабле, но позволяет операторам продлить срок службы батарей — ценная возможность, учитывая, что разрядка батареи является одной из наиболее частых причин долгосрочного выхода из строя спутника. Планировщики ожидают, что в течение срока службы космического корабля потребуется только 40% емкости батарей. [95]
Электронные системы [ править ]
32 Главный компьютер MRO представляет собой с тактовой частотой 133 МГц, 10,4 миллиона транзисторов -разрядный RAD750 процессор , радиационно-стойкую версию процессора PowerPC 750 или G3 со специальной материнской платой . [97] Программное обеспечение операционной системы — VxWorks и имеет расширенные протоколы защиты от сбоев и мониторинга. [98]
Данные хранятся в 160 Гбит (20 ГБ ) модуле флэш-памяти емкостью , состоящем из более чем 700 микросхем памяти емкостью 256 Мбит каждая . Эта емкость памяти на самом деле не так уж велика, учитывая объем данных, которые необходимо получить; например, размер одного изображения с камеры HiRISE может достигать 28 Гб. [98]
Телекоммуникационная система [ править ]


На момент запуска Телекоммуникационная Подсистема на MRO была лучшей цифровой системой связи, отправленной в глубокий космос, и впервые использовала турбокоды , приближающиеся к пропускной способности . Он был мощнее, чем любая предыдущая миссия в дальний космос , и способен передавать данные более чем в десять раз быстрее, чем предыдущие миссии на Марс. [99] Наряду с пакетом связи Electra система состоит из очень большой (3 м (9,8 футов)) антенны, которая используется для передачи данных через сеть дальнего космоса на частотах X-диапазона на частоте 8,41 ГГц . Он также демонстрирует использование диапазона K a на частоте 32 ГГц для более высоких скоростей передачи данных. [100] Максимальная скорость передачи данных с Марса может достигать 6 Мбит/с, но в среднем составляет от 0,5 до 4 Мбит/с. [99] Космический корабль оснащен двумя ламповыми усилителями бегущей волны (TWTA) X-диапазона мощностью 100 Вт (один из которых является резервным), одним K a -диапазона усилителем мощностью 35 Вт и двумя малыми транспондерами дальнего космоса (SDST). [101] [102]
Также имеются две антенны меньшего размера с низким коэффициентом усиления для связи с более низкой скоростью во время чрезвычайных ситуаций и особых мероприятий. Эти антенны не имеют фокусирующих антенн и могут передавать и принимать сигналы с любого направления. Они являются важной резервной системой, гарантирующей, что MRO всегда будет доступен, даже если его основная антенна направлена в сторону от Земли. [103] [104]
Подсистема K a- диапазона была использована, чтобы показать, как такая система может использоваться космическими кораблями в будущем. Из-за отсутствия спектра в X-диапазоне 8,41 ГГц будущие высокоскоростные миссии в дальний космос будут использовать K a -диапазон 32 ГГц. Сеть дальнего космоса НАСА (DSN) реализовала возможности приема K a -диапазона на всех трех своих комплексах (Голдстоун, Канберра и Мадрид) через свою 34-метровую подсеть лучеволноводных антенн (BWG). [100] Испытания K a -диапазона также были запланированы на этапе научных исследований, но во время аэроторможения переключатель вышел из строя, в результате чего антенна с высоким коэффициентом усиления X-диапазона была ограничена одним усилителем. [105] Если этот усилитель выйдет из строя, вся высокоскоростная связь в X-диапазоне будет потеряна. Нисходящая линия связи K a является единственной оставшейся резервной копией для этой функции, и поскольку возможность использования диапазона K a одного из транспондеров SDST уже вышла из строя, [106] (а у другого могла возникнуть та же проблема) Лаборатория реактивного движения решила остановить все демонстрации диапазона K a и оставить оставшиеся возможности в резерве. [107]
К ноябрю 2013 года MRO объем возвращенных научных данных превысил 200 терабит. Данные, возвращенные миссией, более чем в три раза превышают общий объем данных, полученных через сеть дальнего космоса НАСА для всех других миссий, управляемых Лабораторией реактивного движения НАСА за последние 10 лет. [108]

и движением ориентацией Управление
В космическом корабле используется топливный бак емкостью 1175 л (258 имп галлонов; 310 галлонов США), заполненный 1187 кг (2617 фунтов) гидразинового монотоплива . Давление топлива регулируется путем добавления газообразного гелия под давлением из внешнего бака. Семьдесят процентов топлива было использовано для вывода на орбиту. [109] и у него достаточно топлива, чтобы продолжать функционировать до 2030-х годов. [110]
На борту MRO имеется 20 двигателей ракетного типа. Каждый из шести больших двигателей производит по 170 Н (38 фунтов -футов тягу ), что в общей сложности составляет 1020 Н (230 фунтов -футов ), предназначенных в основном для вывода на орбиту. Эти двигатели были первоначально разработаны для спускаемого аппарата Mars Surveyor 2001 . Шесть средних двигателей создают по 22 Н (4,9 фунт -фута тягу ) каждый для маневров коррекции траектории и управления ориентацией во время вывода на орбиту. Наконец, каждый из восьми небольших двигателей создает по 0,9 Н (0,20 фунт- фута ) для управления ориентацией во время обычных операций. тягу [109]
Четыре реактивных колеса также используются для точного управления ориентацией во время действий, требующих высокой устойчивости платформы, например, при съемке изображений с высоким разрешением, при которой даже небольшие движения могут вызвать размытие изображения. Каждое колесо используется для одной оси движения. Четвертое колесо является резервным на случай, если одно из трех остальных выйдет из строя. Каждое колесо весит 10 кг (22 фунта) и может вращаться со скоростью до 100 Гц или 6000 об/мин . [109] [111]
Чтобы определить орбиту космического корабля и облегчить маневры, вокруг космического корабля размещены 16 датчиков Солнца – восемь основных и восемь резервных – для калибровки направления Солнца относительно корпуса орбитального аппарата. Два звездных трекера, цифровые камеры, используемые для картирования положения каталогизированных звезд , предоставляют НАСА полную трехосную информацию об ориентации и положении космического корабля. Основной и резервный миниатюрный инерциальный измерительный блок (MIMU) , предоставленный Honeywell , измеряет изменения положения космического корабля, а также любые негравитационные изменения его линейной скорости. Каждый MIMU представляет собой комбинацию трёх акселерометров и трёх кольцевых лазерных гироскопов . Все эти системы критически важны для MRO , поскольку они должны иметь возможность наводить камеру с очень высокой точностью, чтобы делать высококачественные снимки, необходимые для миссии. Он также был специально разработан для минимизации любых вибраций космического корабля, чтобы его инструменты могли делать изображения без каких-либо искажений, вызванных вибрациями. [112] [113] [114]
Стоимость [ править ]
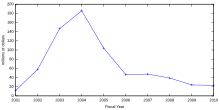
Общая стоимость MRO до конца его основной миссии составила 716,6 миллиона долларов . Из этой суммы $416,6 млн было потрачено на разработку космического корабля, около $90 млн на его запуск и $210 млн на 5 лет эксплуатации миссии. С 2011 года ежегодные операционные расходы MRO составляют в среднем 31 миллион долларов в год с поправкой на инфляцию. [115]
Открытия [ править ]
Лед [ править ]
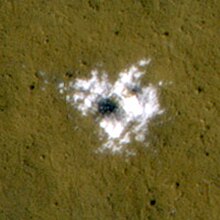
Статья в журнале Science в сентябре 2009 г. [116] сообщили, что некоторые новые кратеры на Марсе образовали относительно чистый водяной лед. После обнажения лед постепенно тускнеет по мере сублимации. Эти новые кратеры были обнаружены и датированы камерой CTX, а идентификация льда была подтверждена с помощью CRISM. Лед был обнаружен в пяти местах, три из которых находились в четырехугольнике Цебрении . Эти места
55°34′N 150°37′E / 55.57°N 150.62°E; 43°17′N 176°54′E / 43.28°N 176.9°E; and 45°00′N 164°30′E / 45°N 164.5°E. Two others are in the Diacria quadrangle: 46°42′N 176°48′E / 46.7°N 176.8°E and 46 ° 20' с.ш., 176 ° 54' в.д. / 46,33 ° с.ш., 176,9 ° в.д. . [117] [118] WikiMiniAtlas
WikiMiniAtlasРезультаты радара SHARAD показали, что объекты, называемые лопастными фартуками обломков (LDA), содержат большое количество водяного льда. Эти LDA, представляющие интерес со времен орбитальных аппаратов «Викинги» , представляют собой фартуки из материала, окружающего скалы. Они имеют выпуклый рельеф и пологий склон; это предполагает течение от крутого истока. Кроме того, на лопастных пластах обломков могут быть видны линии поверхности, как и на каменных ледниках на Земле. [119] SHARAD предоставил убедительные доказательства того, что LDA в Hellas Planitia представляют собой ледники , покрытые тонким слоем обломков (т.е. камней и пыли); наблюдалось сильное отражение от верха и основания LDA, что позволяет предположить, что чистый водяной лед составляет основную часть пласта (между двумя отражениями). [120] На основании экспериментов «Феникс» спускаемого аппарата и исследований « Марсианской Одиссеи» с орбиты известно, что водяной лед существует прямо под поверхностью Марса на крайнем севере и юге (высокие широты). [121] [122]
Хлоридные месторождения и водные минералы [ править ]

Используя данные Mars Global Surveyor , Mars Odyssey и MRO , ученые обнаружили широко распространенные месторождения хлоридных минералов. Имеющиеся данные свидетельствуют о том, что отложения образовались в результате испарения обогащенных минералами вод. Исследование предполагает, что озера могли быть разбросаны по большим участкам марсианской поверхности. Обычно хлориды выходят из раствора последними . Перед ними должны выпасть в осадок карбонаты, сульфаты и кремнезем. Марсоходы на поверхности обнаружили сульфаты и кремнезем. В местах с хлоридными минералами когда-то могли обитать различные формы жизни. Более того, такие территории могли сохранить следы древней жизни. [123]
В 2009 году группа ученых из команды CRISM сообщила о девяти-десяти различных классах минералов, образующихся в присутствии воды. Различные типы глин (также называемые слоистыми силикатами) были обнаружены во многих местах. Идентифицированные филлосиликаты включали смектит алюминия, смектит железа/магния, каолинит , пренит и хлорит . обнаружены породы, содержащие карбонаты Вокруг бассейна Исидис . Карбонаты относятся к одному классу, в котором могла возникнуть жизнь. Было обнаружено, что районы вокруг Валлес Маринерис содержат гидратированный кремнезем и гидратированные сульфаты. Исследователи обнаружили гидратированные сульфаты и минералы железа в Терра Меридиани и Валлес Маринерис. Другими минералами, найденными на Марсе, были ярозит , алунит , гематит , опал и гипс . От двух до пяти классов минералов образовались с правильным pH и достаточным количеством воды, чтобы позволить жизни расти. [124]
Повторяющиеся линии уклона [ править ]
4 августа 2011 года (2125 сол) НАСА объявило, что MRO обнаружило темные полосы на склонах , известные как повторяющиеся наклонные линии, вызванные тем, что, по-видимому, текла соленая вода на поверхности или под поверхностью Марса. [125] 28 сентября 2015 года этот вывод был подтвержден на специальной пресс-конференции НАСА. [126] [127] Однако в 2017 году дальнейшие исследования показали, что темные полосы были созданы песчинками и пылью, скатывающимися по склонам, а не водой, затемняющей землю. [128]
См. также [ править ]
- Исследование Марса
- География Марса — определение и характеристика марсианских регионов.
- Программа HiWish - программа НАСА для публичных предложений изображений MRO.
Примечания [ править ]
- ^ Из-за холода в космосе для правильной работы приборы космического корабля необходимо «разогреть». [29]
- ^ Приводятся различные цифры мощности: от 600 Вт до 2000 Вт в афелии до 1000 Вт в неустановленном месте на орбите MRO. Из-за противоречивой информации из надежных источников вместо точного числа использовался диапазон. [96] [83] [8]
Ссылки [ править ]
![]() Эта статья включает общедоступные материалы с веб-сайтов или документов Национального управления по аэронавтике и исследованию космического пространства .
Эта статья включает общедоступные материалы с веб-сайтов или документов Национального управления по аэронавтике и исследованию космического пространства .
- ^ «Марсианский разведывательный орбитальный аппарат» . Сайт НАСА по исследованию Солнечной системы. Архивировано из оригинала 8 сентября 2018 года . Проверено 1 декабря 2022 г.
- ^ Jump up to: Перейти обратно: а б Лайонс, Дэниел Т. (5–8 августа 2002 г.). «Марсианский разведывательный орбитальный аппарат: эталонная траектория аэроторможения» (PDF) . Конференция и выставка специалистов по астродинамике AIAA/AAS . Архивировано из оригинала (PDF) 18 октября 2011 года . Проверено 9 марта 2012 г.
- ^ «Марсианский разведывательный орбитальный аппарат» . НАСА . Архивировано из оригинала 29 июля 2023 года . Проверено 29 июля 2023 г.
- ^ «НАСА раскрывает планы марсианской кампании XXI века» . Space.com . Архивировано из оригинала 10 декабря 2004 года . Проверено 4 июля 2006 г.
- ^ «НАСА выбрало Lockheed Martin для создания корабля на Марс в 2005 году» . Space.com . Архивировано из оригинала 12 февраля 2006 года . Проверено 4 июля 2006 г.
- ^ «День переезда марсианского разведывательного орбитального аппарата» . Space.com . Май 2005. Архивировано из оригинала 25 ноября 2006 года . Проверено 4 июля 2006 г.
- ^ «428154main_Planetary_Science.pdf» (PDF) . НАСА . п. 47. Архивировано (PDF) из оригинала 10 мая 2017 года . Проверено 29 июля 2023 г.
- ^ Jump up to: Перейти обратно: а б с д Зурек, Ричард В.; Смрекар, Сюзанна Э. (2007). «Обзор научной миссии Mars Reconnaissance Orbiter (MRO)» . Журнал геофизических исследований: Планеты . 112 (Е5): E05S01. Бибкод : 2007JGRE..112.5S01Z . дои : 10.1029/2006JE002701 . ISSN 2156-2202 .
- ^ Шарроу, Р. (24 июля 2006 г.). «pds-geosciences.wustl.edu/missions/mro/docs/mro_mission.txt» . pds-geosciences.wustl.edu . Архивировано из оригинала 27 декабря 2021 года . Проверено 29 июля 2023 г.
- ^ Грейсиус, Тони (2 мая 2018 г.). «НАСА оценивает четыре места-кандидата для миссии на Марс в 2016 году» . НАСА . Архивировано из оригинала 28 февраля 2014 года . Проверено 29 июля 2023 г.
- ^ Грант, Джон А.; Голомбек, Мэтью П.; Уилсон, Шэрон А.; Фарли, Кеннет А.; Уиллифорд, Кен Х.; Чен, Ал (1 декабря 2018 г.). «Научный процесс выбора места посадки марсохода 2020 года» . Планетарная и космическая наука . 164 : 106–126. Бибкод : 2018P&SS..164..106G . дои : 10.1016/j.pss.2018.07.001 . ISSN 0032-0633 . S2CID 125118346 . Архивировано из оригинала 4 августа 2023 года . Проверено 29 июля 2023 г.
- ^ «ILS запустит марсианский разведывательный орбитальный аппарат НАСА на Атласе V» . Международные пусковые услуги . Архивировано из оригинала 11 марта 2006 года . Проверено 30 июня 2006 г.
- ^ «Многоцелевая миссия НАСА на Марс успешно стартовала» . Пресс-релиз НАСА от 12 августа 2005 г. Архивировано из оригинала 10 мая 2013 года . Проверено 30 мая 2006 г.
- ^ «Подход: маневры по коррекции траектории 4, 5 и 6 – НАСА» . mars.nasa.gov . Архивировано из оригинала 18 августа 2023 года . Проверено 18 августа 2023 г.
- ^ Лири, Уоррен Э. (11 марта 2006 г.). «Американский космический корабль вышел на орбиту Марса» . Нью-Йорк Таймс . Архивировано из оригинала 24 апреля 2009 года . Проверено 31 марта 2012 г.
- ^ «Межпланетная круизная навигация марсианского разведывательного орбитального аппарата» (PDF) . п. 16. Архивировано (PDF) из оригинала 30 мая 2022 года . Проверено 21 августа 2022 г.
- ^ Jump up to: Перейти обратно: а б «Новый орбитальный аппарат Марса готов к действию» . Space.com . 21 марта 2006 года. Архивировано из оригинала 25 ноября 2006 года . Проверено 28 мая 2006 г.
- ^ Зурек, Ричард В.; Смрекар, Сюзанна Э. (2007). «Обзор научной миссии Mars Reconnaissance Orbiter (MRO)» . Журнал геофизических исследований: Планеты . 112 (E5): 15. Бибкод : 2007JGRE..112.5S01Z . дои : 10.1029/2006JE002701 . ISSN 2156-2202 .
- ^ «Все миссии на Марс когда-либо» . Планетарное общество . Архивировано из оригинала 12 июля 2018 года . Проверено 22 августа 2023 г.
- ^ «Хронология миссии: Аэроторможение» . Марсианский разведывательный орбитальный аппарат: Миссия . Архивировано из оригинала 6 марта 2006 года . Проверено 28 мая 2006 г.
- ^ «Орбитальный аппарат Марса успешно совершил большой ожог» . Space.com . 30 августа 2006 года. Архивировано из оригинала 8 июля 2008 года . Проверено 30 августа 2006 г.
- ^ «НАСА – Марсианский разведывательный орбитальный аппарат НАСА достиг запланированной траектории полета» . www.nasa.gov . Архивировано из оригинала 29 октября 2006 года . Проверено 18 августа 2023 г.
- ^ «Марсианский разведывательный орбитальный аппарат достиг запланированной траектории полета» . Лаборатория реактивного движения . Архивировано из оригинала 28 сентября 2006 года . Проверено 13 сентября 2006 г.
- ^ Jump up to: Перейти обратно: а б «Информационный бюллетень: HiRISE» (PDF) . Национальный музей авиации и космонавтики . Архивировано из оригинала (PDF) 21 июня 2013 года . Проверено 18 февраля 2006 г. ( PDF )
- ^ «Солнечное соединение | Марс в нашем ночном небе» . Исследование Марса НАСА . Архивировано из оригинала 20 августа 2021 года . Проверено 18 августа 2023 г.
- ^ Зурек, Ричард В.; Смрекар, Сюзанна Э. (12 мая 2007 г.). «Обзор научной миссии Mars Reconnaissance Orbiter (MRO)» . Журнал геофизических исследований . 112 (Е5): E05S01. Бибкод : 2007JGRE..112.5S01Z . дои : 10.1029/2006JE002701 . ISSN 0148-0227 .
- ^ «Марсианский орбитальный аппарат смотрит на марсоход» . 6 октября 2006 года. Архивировано из оригинала 21 октября 2007 года . Проверено 9 октября 2006 г.
- ^ «Веб-сайт группы Mars Climate Sounder - Чем мы занимаемся | Планетарное общество» . Архивировано из оригинала 27 августа 2009 года . Проверено 16 января 2008 г.
- ^ «Тепловые системы – НАСА» . mars.nasa.gov . Архивировано из оригинала 1 октября 2023 года . Проверено 21 августа 2023 г.
- ^ «Ухудшение состояния самых зорких глаз на Марсе остановилось – марсоходы – 24 марта 2007 г. – New Scientist Space» . Архивировано из оригинала 20 января 2023 года . Проверено 4 сентября 2017 г.
- ^ «Новейший марсианский орбитальный аппарат НАСА прошел испытания реле связи» . Программа НАСА по исследованию Марса . 17 ноября 2006 г. Архивировано из оригинала 20 января 2023 г. Проверено 20 января 2023 г.
- ^ «PIA10705: Спуск Феникса на фоне кратера» . Фотожурнал Лаборатории реактивного движения НАСА . 27 мая 2008 г. Архивировано из оригинала 7 августа 2022 г. Проверено 20 января 2023 г.
- ^ Моррис, Джефферсон (4 января 2010 г.). «Энергетический цикл». Авиационная неделя . МакГроу-Хилл: 17.
- ^ Jump up to: Перейти обратно: а б с «В глубине | Марсианский разведывательный орбитальный аппарат» . Исследование Солнечной системы НАСА . Архивировано из оригинала 3 апреля 2020 года . Проверено 21 февраля 2023 г.
- ^ «Ученые поражены данными марсианского зонда» . Новости Эн-Би-Си . 4 марта 2010 года. Архивировано из оригинала 14 апреля 2013 года . Проверено 21 апреля 2013 г.
- ^ «НАСА продлевает исследования для 8 миссий по планетарным наукам» . Исследование Марса НАСА . 25 апреля 2022 года. Архивировано из оригинала 8 июля 2023 года . Проверено 7 июля 2023 г.
- ^ «Любопытство, замеченное на парашюте орбитальным аппаратом» . Программа НАСА по исследованию Марса . 6 августа 2012 г. Архивировано из оригинала 1 декабря 2022 г. Проверено 20 января 2023 г.
- ^ Jump up to: Перейти обратно: а б с д и «Марсианский разведывательный орбитальный аппарат - подробно» . Исследование Солнечной системы НАСА . Архивировано из оригинала 8 сентября 2018 года . Проверено 24 апреля 2020 г.
- ^ Вебстер, Гай; Браун, Дуэйн (19 октября 2014 г.). «Марсианский разведывательный орбитальный аппарат НАСА изучает пролет кометы» . НАСА . Архивировано из оригинала 9 июня 2017 года . Проверено 20 октября 2014 г.
- ^ Вебстер, Гай; Браун, Дуэйн (19 октября 2014 г.). «Орбитальный аппарат НАСА Mars Odyssey наблюдает за пролетающей кометой» . НАСА . Архивировано из оригинала 8 мая 2017 года . Проверено 20 октября 2014 г.
- ^ Джонс, Нэнси; Штайгервальд, Билл; Вебстер, Гай; Браун, Дуэйн (19 октября 2014 г.). «MAVEN НАСА изучает пролетящую комету и ее последствия» . НАСА . Архивировано из оригинала 4 июля 2017 года . Проверено 20 октября 2014 г.
- ^ Вебстер, Гай; Браун, Дуэйн; Джонс, Нэнси; Штайгервальд, Билл (19 октября 2014 г.). «Все три марсианских орбитальных аппарата НАСА здоровы после пролета кометы» . НАСА . Архивировано из оригинала 3 июля 2017 года . Проверено 20 октября 2014 г.
- ^ «Соприкосновение кометы с Марсом» . Нью-Йорк Таймс . Агентство Франс-Пресс. 19 октября 2014. Архивировано из оригинала 27 октября 2014 года . Проверено 20 октября 2014 г.
- ^ Дэвис, Никола (11 ноября 2016 г.). «Марсианский зонд «Бигль-2» был «мучительно близок» к успеху, как показывают новые исследования» . Хранитель . ISSN 0261-3077 . Архивировано из оригинала 7 марта 2023 года . Проверено 7 марта 2023 г.
- ^ Сонди, Дэвид (30 июля 2015 г.). «Марсианский орбитальный аппарат готовится к прибытию спускаемого аппарата InSight в следующем году» . Новый Атлас . Архивировано из оригинала 30 июля 2015 года . Проверено 21 января 2023 г.
- ^ «Марсианский орбитальный аппарат НАСА готовится к прибытию марсианского модуля в 2016 году» . 28 июля 2015. Архивировано из оригинала 30 июля 2015 года . Проверено 30 июля 2015 г.
- ^ «Посадочный модуль NASA InSight прибывает на поверхность Марса» . Программа НАСА по исследованию Марса . Архивировано из оригинала 6 августа 2019 года . Проверено 26 ноября 2018 г.
- ^ «Марсианский разведывательный орбитальный аппарат готовится на годы вперед» . НАСА/Лаборатория реактивного движения . Пресс-служба Лаборатории реактивного движения. 9 февраля 2018 года. Архивировано из оригинала 3 августа 2020 года . Проверено 24 апреля 2020 г.
- ^ МакИвен, Альфред (23 апреля 2019 г.). «Команда HiRISE преодолевает проблемы с изображением, поскольку орбитальный аппарат Марса ожидает еще одно десятилетие на орбите» . Планетарное общество . Архивировано из оригинала 5 февраля 2023 года . Проверено 4 августа 2023 г.
- ^ «HiRISE | Каталог изображений» . www.uahirise.org . Архивировано из оригинала 20 апреля 2020 года . Проверено 31 октября 2023 г.
- ^ Jump up to: Перейти обратно: а б «НАСА продлевает исследования для 8 миссий по планетарным наукам» . 25 апреля 2022 года. Архивировано из оригинала 26 апреля 2022 года . Проверено 26 апреля 2022 г.
- ^ Хартоно, Наоми (25 апреля 2023 г.). «НАСА снимает с эксплуатации прибор для картирования минералов на орбитальном аппарате Марса» . НАСА . Архивировано из оригинала 22 июня 2023 года . Проверено 23 июня 2023 г.
- ^ «Детали космических кораблей: Инструменты» . Сайт Марсианского разведывательного орбитального аппарата . Архивировано из оригинала 8 марта 2005 года . Проверено 20 февраля 2005 г.
- ^ «Марсианский разведывательный орбитальный аппарат в цифрах» . Исследование Марса НАСА . Архивировано из оригинала 18 августа 2023 года . Проверено 18 августа 2023 г.
- ^ Ягула, Декстер (19 февраля 2022 г.). «СПУТНИКОВАЯ СЪЕМКА ДЛЯ ВСЕХ» . IEEE-спектр . Архивировано из оригинала 7 июля 2023 года . Проверено 6 июля 2023 г.
- ^ «Технические характеристики камеры MRO HiRISE» . Сайт HiRISE . Архивировано из оригинала 10 мая 2013 года . Проверено 2 января 2006 г.
- ^ «HiRISE: Разработка приборов» (PDF) . Сайт Исследовательского центра Эймса НАСА . Архивировано (PDF) из оригинала 10 мая 2013 г. Проверено 7 февраля 2006 г. ( PDF )
- ^ «ХАЙРАЙС» . Сайт HiRISE . Архивировано из оригинала 15 ноября 2019 года . Проверено 28 мая 2006 г.
- ^ «HiRISE просматривает изображения НАСА InSight и Curiosity на Марсе» . Исследование Марса НАСА . 16 октября 2019 года. Архивировано из оригинала 29 июля 2023 года . Проверено 29 июля 2023 г.
- ^ Малин, MC; и др. (2007). «Исследование контекстной камеры на борту марсианского разведывательного орбитального аппарата» . Журнал геофизических исследований . 112 (E05S04): 1–25. Бибкод : 2007JGRE..112.5S04M . дои : 10.1029/2006je002808 . Архивировано из оригинала 20 января 2023 года . Проверено 3 августа 2010 г.
- ^ Харрисон, Таня Н.; Малин, Майкл С.; Эджетт, Кеннет С. (2009). «Современная деятельность, мониторинг и документирование оврагов с помощью контекстной камеры (CTX) Mars Reconnaissance Orbiter (MRO)». Рефераты с программами Геологического общества Америки . 41 (7): 267. Бибкод : 2009GSAA...41..267H .
- ^ «Описание инструмента MRO Context Imager (CTX)» . Сайт Malin Space Science Systems . Архивировано из оригинала 22 июня 2006 года . Проверено 6 июня 2006 г.
- ^ «Десятилетие составления самой четкой карты Марса» . Исследование Марса НАСА . Архивировано из оригинала 8 июня 2023 года . Проверено 4 августа 2023 г.
- ^ Грейсиус, Тони (4 апреля 2023 г.). «Новая интерактивная мозаика использует изображения НАСА, чтобы показать Марс в ярких деталях» . НАСА . Архивировано из оригинала 19 мая 2023 года . Проверено 4 августа 2023 г.
- ^ «Детали космических кораблей: Инструменты: MARCI» . Сайт МАРСИ . Архивировано из оригинала 5 мая 2006 года . Проверено 2 июня 2006 г.
- ^ «Mars Color Imager: Как MARCI создает цветные изображения, выпуск MRO MARCI № MARCI2-3, 13 апреля 2006 г.» . Архивировано из оригинала 13 мая 2013 года . Проверено 13 марта 2012 г.
- ^ «НАСА – NSSDCA – Эксперимент – Подробности» . nssdc.gsfc.nasa.gov . Архивировано из оригинала 14 апреля 2020 года . Проверено 2 февраля 2023 г.
 В данную статью включен текст из этого источника, находящегося в свободном доступе .
В данную статью включен текст из этого источника, находящегося в свободном доступе . - ^ «МАРСИКОВЫЙ ОРБИТЕР (MRO) MARS COLOR IMAGER (MARCI) ОПИСАНИЕ ПРИБОРА» . msss.com . Малинские космические научные системы. Архивировано из оригинала 2 февраля 2023 года . Проверено 2 февраля 2023 г.
- ^ Jump up to: Перейти обратно: а б «Обзор инструмента CRISM» . Веб-сайт инструмента CRISM . Архивировано из оригинала 7 марта 2005 года . Проверено 2 апреля 2005 г.
- ^ «КРИЗМ» . Разведывательный орбитальный аппарат NASA MARS . Архивировано из оригинала 12 ноября 2022 года . Проверено 20 января 2023 г.
- ^ Мурчи, Скотт Л.; Горчица, Джон Ф.; Эльманн, Бетани Л.; Милликен, Ральф Э.; Бишоп Дженис Л.; МакКаун, Нэнси К.; Ное Добря, Эльдар З.; Силос, Фрэнк П.; Бучковски, Дебра Л.; Уайзман, Сандра М.; Арвидсон, Раймонд Э.; Рэй, Джеймс Дж.; Суэйзи, Грегг; Кларк, Роджер Н.; Де Марэ, Дэвид Дж. (22 сентября 2009 г.). «Синтез марсианской водной минералогии после 1 марсианского года наблюдений с марсианского разведывательного орбитального аппарата» . Журнал геофизических исследований . 114 (Е2): E00D06. Бибкод : 2009JGRE..114.0D06M . дои : 10.1029/2009JE003342 . ISSN 0148-0227 .
- ^ «Детали космического корабля: Инструменты: MCS» . Веб-сайт инструмента CRISM . Архивировано из оригинала 4 января 2006 года . Проверено 28 мая 2006 г.
- ^ Джау, Бруно М. (март 2008 г.). «Механическое описание прибора для зондирования климата Марса» . Аэрокосмическая конференция IEEE 2008 г. ИИЭЭ . дои : 10.1109/aero.2008.4526543 .
- ^ «Научные инструменты ТОиР» . НАСА . Архивировано из оригинала 29 июня 2024 года . Проверено 1 июля 2024 г.
- ^ Леа, Роберт (6 ноября 2023 г.). «Гражданские учёные обнаруживают закономерности в облаках над Марсом» . Space.com . Архивировано из оригинала 9 декабря 2023 года . Проверено 1 июля 2024 г.
- ^ Касс, Д.М.; Шофилд, Дж.Т.; Кляйнбёль, А.; МакКлиз, диджей; Небеса, Нью-Йорк; Ширли, Дж. Х.; Стил, LJ (16 декабря 2020 г.). «Наблюдение марсианской климатической эхолотом глобальной пыльной бури на Марсе в 2018 году» . Письма о геофизических исследованиях . 47 (23). дои : 10.1029/2019GL083931 . ISSN 0094-8276 . Архивировано из оригинала 6 мая 2023 года . Проверено 1 июля 2024 г.
- ^ Крей, Дэниел (17 сентября 2012 г.). «Марсианская метель! На Красной планете идет снег» . Время . ISSN 0040-781X . Архивировано из оригинала 5 марта 2024 года . Проверено 1 июля 2024 г.
- ^ «ТОиР МКС» . Планетарная система данных . Архивировано из оригинала 20 января 2023 года . Проверено 20 января 2023 г.
- ^ МакКлиз, диджей; Шофилд, Дж.Т.; Тейлор, ФРВ; Калькутт, Южная Каролина; Фут, MC; Касс, Д.М.; Леови, CB; Пейдж, окружной прокурор; Рид, ПЛ; Журек, RW (май 2007 г.). «Марсианский климатический зонд: исследование термической структуры и структуры водяного пара, распределения пыли и конденсата в атмосфере, а также энергетического баланса полярных регионов» . Журнал геофизических исследований . 112 (Е05С06). дои : 10.1029/2006JE002790 . ISSN 0148-0227 .
- ^ Веб-сайт НАСА MRO (15 июля 2008 г.). ШАРАД: Детали космического корабля MRO. Архивировано 4 июня 2008 г. в Wayback Machine.
- ^ «ШАРАД» . mars.nasa.gov . НАСА. Архивировано из оригинала 18 марта 2020 года . Проверено 24 апреля 2020 г.
- ^ Чарльз Д. Эдвардс младший; Томас С. Джедри; Эрик Шварцбаум; и Энн С. Деверо; Рамон ДеПаула; Марк Дапор; Томас В. Фишер. «Полезная нагрузка Electra Proximity Link для ретрансляционной связи и навигации на Марсе» (PDF) . Архивировано из оригинала (PDF) 2 мая 2013 г.
- ^ Jump up to: Перейти обратно: а б с д и «Пресс-кит о прибытии разведывательного орбитального аппарата Марса» (PDF) . НАСА . Март 2006 г. Архивировано (PDF) из оригинала 10 декабря 2022 г. . Проверено 20 января 2023 г.
- ^ Тейлор, Джим; Ли, Деннис К.; Шамбаяти, Шервин (сентябрь 2006 г.). «Телекоммуникации марсианского разведывательного орбитального аппарата» (PDF) . JPL ДЕСКАНСО . Архивировано (PDF) из оригинала 20 января 2023 г. Проверено 20 января 2023 г.
- ^ «Электра» . Разведывательный орбитальный аппарат NASA MARS . Архивировано из оригинала 28 сентября 2022 года . Проверено 20 января 2023 г.
- ^ «PIA10368: Фобос с высоты 6800 километров (цвет)» . photojournal.jpl.nasa.gov . 9 апреля 2008 года. Архивировано из оригинала 23 июля 2023 года . Проверено 16 июля 2023 г.
- ^ «Ка-диапазон – НАСА» . mars.nasa.gov . Архивировано из оригинала 21 августа 2023 года . Проверено 21 августа 2023 г.
- ^ «Детали космического корабля: Пакет исследований гравитационного поля» . Сайт Марсианского разведывательного орбитального аппарата . Архивировано из оригинала 31 марта 2006 года . Проверено 28 мая 2006 г.
- ^ «Акселерометры – НАСА» . mars.nasa.gov . Проверено 18 августа 2023 г.
- ^ «Рад 750» . Аэрокосмические детали BAE . Архивировано из оригинала 13 мая 2006 года . Проверено 28 мая 2006 г.
- ^ «Детали космических кораблей: Конструкции» . Лаборатория реактивного движения НАСА . Архивировано из оригинала 1 марта 2006 года . Проверено 20 января 2023 г.
- ^ «Сводка по космическому кораблю» . Веб-сайт НАСА MRO . Архивировано из оригинала 2 марта 2006 года . Проверено 29 мая 2006 г.
- ^ Jump up to: Перейти обратно: а б с «Детали космических кораблей: Электроэнергия» . Веб-сайт НАСА MRO . Архивировано из оригинала 31 марта 2006 года . Проверено 28 мая 2006 г.
- ^ Jump up to: Перейти обратно: а б «Электроэнергетика» . НАСА ТОиР . Архивировано из оригинала 6 декабря 2022 года . Проверено 31 января 2023 г.
- ^ «Рад 750» (PDF) . Детали для аэрокосмической отрасли BAE . Архивировано из оригинала (PDF) 26 марта 2009 г. Проверено 28 мая 2006 г.
- ^ Jump up to: Перейти обратно: а б «Детали космических аппаратов: системы управления и обработки данных» . Веб-сайт НАСА MRO . Архивировано из оригинала 31 марта 2006 года . Проверено 28 мая 2006 г.
- ^ Jump up to: Перейти обратно: а б Тейлор, Джим; Ли, Деннис К.; Шамбаяти, Шервин (сентябрь 2006 г.). «Телекоммуникации марсианского разведывательного орбитального аппарата» (PDF) . Лаборатория реактивного движения . Архивировано (PDF) из оригинала 20 января 2023 г. Проверено 20 августа 2023 г.
- ^ Jump up to: Перейти обратно: а б Шамбаяти, С.; Давариан, Ф.; Морабито, Д. (12 марта 2005 г.). «Проектирование и планирование линии связи для демонстрации телекоммуникаций Mars Reconnaissance Orbiter (MRO) Ka-диапазона (32 ГГц)» . Аэрокосмическая конференция IEEE 2005 г. ИИЭЭ . стр. 1559–1569. дои : 10.1109/AERO.2005.1559447 . ISBN 0-7803-8870-4 . S2CID 20667200 . Архивировано из оригинала 13 июня 2018 года . Проверено 31 января 2023 г.
- ^ «Детали космических кораблей: Телекоммуникации» . Веб-сайт НАСА MRO . Архивировано из оригинала 17 марта 2006 года . Проверено 28 мая 2006 г.
- ^ Шамбаяти, Шервин; Морабито, Дэвид; Бордер, Джеймс С.; Давариан, Фарамаз; Ли, Деннис; Мендоса, Рикардо; Бритклифф, Майкл; Вайнреб, Сандер (1 января 2006 г.). «Демонстрация марсианского разведывательного орбитального аппарата Ka-диапазона (32 ГГц): операции на этапе крейсерского полета» . Конференция SpaceOps 2006 . дои : 10.2514/6.2006-5786 . ISBN 978-1-62410-051-2 . Архивировано из оригинала 31 января 2023 года . Получено 31 января 2023 г. - через ResearchGate.
- ^ «Антенны – НАСА» . mars.nasa.gov . Архивировано из оригинала 20 января 2023 года . Проверено 1 февраля 2023 г.
- ^ «Марсианский орбитальный разведывательный аппарат» . pds-geosciences.wustl.edu . Архивировано из оригинала 23 июля 2023 года . Проверено 1 февраля 2023 г.
- ^ «Аномалия резервного переключателя волновода MRO» . Архивировано из оригинала 10 мая 2013 года.
- ^ «CSAM дополняет рентгеновский контроль крепления штампа (аномалия MRO Ka-диапазона)» . Архивировано из оригинала 10 мая 2013 года.
- ^ Байер, Ти Джей (2008). «Аномалии в полете и уроки, извлеченные из миссии марсианского разведывательного орбитального аппарата». Аэрокосмическая конференция IEEE 2008 г. Аэрокосмическая конференция IEEE 2008 г. IEEE. стр. 1–13. дои : 10.1109/AERO.2008.4526483 . ISBN 978-1-4244-1487-1 .
- ^ «Плодотворный марсианский орбитальный аппарат НАСА преодолел рубеж в области больших данных» . Лаборатория реактивного движения — НАСА . 8 ноября 2013 г. Архивировано из оригинала 9 августа 2020 г. Проверено 9 ноября 2013 г.
- ^ Jump up to: Перейти обратно: а б с «Детали космического корабля: Движение» . Веб-сайт НАСА MRO . Архивировано из оригинала 31 марта 2006 года . Проверено 28 мая 2006 г.
- ^ Кларк, Стивен (20 августа 2015 г.). «НАСА будет полагаться на бесшумную рабочую лошадку марсианской программы на долгие годы» . Астрономия сейчас . Архивировано из оригинала 22 августа 2015 года . Проверено 20 августа 2015 г.
- ^ «Устройства управления» . НАСА ТОиР . Архивировано из оригинала 31 января 2023 года . Проверено 31 января 2023 г.
- ^ «Датчики» . Марсианский разведывательный орбитальный аппарат НАСА . Архивировано из оригинала 20 января 2023 года . Проверено 20 января 2023 г.
- ^ «Подход к проектированию марсианского орбитального разведывательного аппарата для получения изображений поверхности с высоким разрешением» (PDF) . PDF . Американское астронавтическое общество. Архивировано из оригинала (PDF) 27 февраля 2009 г. Проверено 29 июля 2023 г.
- ^ «Стоимость марсианского разведывательного орбитального аппарата» . www.planetary.org . Планетарное общество. Архивировано из оригинала 3 августа 2020 года . Проверено 24 апреля 2020 г.
- ^ Бирн, С. и др. 2009. Распределение подземного льда средних широт на Марсе из новых ударных кратеров : 329,1674–1676.
- ^ Андреа Томпсон (24 сентября 2009 г.). «В кратерах Марса обнаружен водяной лед» . Space.com . Архивировано из оригинала 25 декабря 2010 года . Проверено 2 сентября 2011 г.
- ^ Сьюзан Ватанабэ (23 сентября 2009 г.). «НАСА проведет телеконференцию для обсуждения новых данных о Марсе» . НАСА. Архивировано из оригинала 11 октября 2011 года . Проверено 2 сентября 2011 г.
- ^ «Космический аппарат НАСА обнаружил погребенные ледники на Марсе» . НАСА/Лаборатория реактивного движения . 20 ноября 2008 г. Архивировано из оригинала 29 августа 2019 г. Проверено 3 октября 2018 г.
- ^ Плаут, Джеффри Дж.; Сафаейнили, Али; Холт, Джон В.; Филлипс, Роджер Дж.; Руководитель Джеймс В. III; Сеу, Роберто; Путциг, Натаниэль Э.; Фригери, Алессандро (2009). «Радиолокационные доказательства наличия льда в лопастных фартуках обломков в средних северных широтах Марса» (PDF) . Письма о геофизических исследованиях . 36 (2). Бибкод : 2009GeoRL..36.2203P . дои : 10.1029/2008GL036379 . S2CID 17530607 . Архивировано из оригинала (PDF) 23 января 2021 года.
- ^ «Марсианский посадочный модуль «Феникс» НАСА подтверждает наличие замерзшей воды» . НАСА . 20 июня 2008 года. Архивировано из оригинала 19 мая 2017 года . Проверено 20 января 2023 г.
- ^ «Одиссея» обнаружила большое количество водяного льда под поверхностью Марса . Программа НАСА по исследованию Марса . 28 мая 2002 г. Архивировано из оригинала 2 июля 2022 г. Проверено 20 января 2023 г.
- ^ Остерлоо, М. и др. 2008. Хлоридсодержащие материалы в южном высокогорье Марса. Наука . 319: 1651–1654
- ^ Мурчи, С. и др. 2009. Синтез марсианской водной минералогии после 1 марсианского года наблюдений с Марсианского разведывательного орбитального аппарата. Журнал геофизических исследований: 114.
- ^ Омар М. (4 августа 2011 г.). «На Марсе может течь соленая вода» . ScienceBlog.com . Архивировано из оригинала 11 августа 2011 года . Проверено 7 августа 2012 г.
- ^ Чанг, Кеннет (28 сентября 2015 г.). «НАСА сообщает о признаках течения жидкой воды на Марсе» . Нью-Йорк Таймс . Архивировано из оригинала 30 сентября 2015 года . Проверено 28 сентября 2015 г.
Кристофер П. Маккей, астробиолог из Исследовательского центра Эймса НАСА, не считает, что RSL — очень многообещающее место для поиска. Чтобы вода была жидкой, она должна быть настолько соленой, чтобы в ней не могло жить ничего, сказал он. «Короткий ответ на вопрос об обитаемости: она ничего не значит», — сказал он.
- ^ Оджа, Лухендра; Вильгельм, Мэри Бет; Мурчи, Скотт Л.; МакИвен, Альфред С.; и др. (28 сентября 2015 г.). «Спектральные доказательства наличия гидратированных солей в повторяющихся наклонных линиях на Марсе». Природа Геонауки . 8 (11): 829–832. Бибкод : 2015NatGe...8..829O . дои : 10.1038/ngeo2546 .
- ^ Грейсиус, Тони (20 ноября 2017 г.). «Повторяющиеся марсианские полосы: струящийся песок, а не вода?» . НАСА . Архивировано из оригинала 8 декабря 2021 года . Проверено 19 июля 2023 г.
Дальнейшее чтение [ править ]
- Хаббард, Скотт (2012). Исследование Марса: хроники десятилетия открытий . Издательство Университета Аризоны. ISBN 978-0-8165-2896-7 .
- Сквайрс, Стив (2005). Бродячий Марс: дух, возможности и исследование Красной планеты . Нью-Йорк: Гиперион. ISBN 978-1-4013-0149-1 .
- Рид, Питер Л. и Льюис, Стивен Л. (2004). Новый взгляд на марсианский климат: атмосфера и окружающая среда пустынной планеты . Берлин: Шпрингер. ISBN 978-3-540-40743-0 .
Внешние ссылки [ править ]
Официальные сайты инструментов [ править ]
- Веб-сайт HiRISE от Университета Аризоны
- Веб-сайт CTX от Malin Space Science Systems
- Веб-сайт MARCI от Malin Space Science Systems
- Сайт SHARAD от НАСА
- Веб-сайт CRISM Хопкинса Лаборатории прикладной физики Университета Джонса


