Полярный посадочный модуль Марса
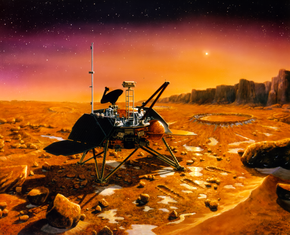 Изображение художника марсианского полярного посадочного модуля на поверхности Марса. | |
| Имена | Mars Surveyor '98 Посадочный модуль |
|---|---|
| Тип миссии | Марс приземляется |
| Оператор | НАСА / Лаборатория реактивного движения |
| ИДЕНТИФИКАТОР КОСПЭРЭ | 1999-001А |
| САТКАТ нет. | 25605 |
| Веб-сайт | science.nasa.gov |
| Продолжительность миссии | 334 дня Провал миссии |
| Свойства космического корабля | |
| Производитель | Мартин Мариетта |
| Стартовая масса | 583 кг [1] |
| Власть | мощностью 200 Вт Солнечная батарея и NiH 2. аккумулятор |
| Начало миссии | |
| Дата запуска | 20:21:10, 3 января 1999 г. (UTC) |
| Ракета | Дельта II 7425-9,5 Д-265 |
| Запуск сайта | Мыс Канаверал SLC-17A |
| Подрядчик | Боинг |
| Конец миссии | |
| Утилизация | Сбой связи после приземления |
| Объявлено | 17 января 2000 г. |
| Последний контакт | 20:00, 3 декабря 1999 г. (UTC) |
| с Марсом Столкновение (неудачная посадка) | |
| Дата воздействия | ~20:15 UTC ERT , 3 декабря 1999 г. |
| Место удара | Последний Скопули 76 ° ю.ш. 195 ° з.д. / 76 ° ю.ш. 195 ° з.д. (прогноз) |
| Марсианский ударник | |
| Компонент космического корабля | Глубокий космос 2 |
 Mars Surveyor 98 Логотип миссии | |

Mars Polar Lander , также известный как Mars Surveyor '98 Lander , представлял собой 290-килограммовый роботизированный посадочный модуль космического корабля, запущенный НАСА 3 января 1999 года для изучения почвы и климата , региона Planum Australe вблизи южного полюса Марса. . Он был частью миссии Mars Surveyor '98 . Однако 3 декабря 1999 года, после того как предполагалось, что этап спуска будет завершен, спускаемый аппарат не смог восстановить связь с Землей. Вскрытие показало, что наиболее вероятной причиной аварии было преждевременное прекращение работы двигателя до того, как посадочный модуль коснулся поверхности, в результате чего он столкнулся с планетой на высокой скорости. [2]
Общая стоимость Mars Polar Lander составила 165 миллионов долларов США. Разработка космического корабля обошлась в 110 миллионов долларов США, запуск оценивался в 45 миллионов долларов США, а операции миссии - в 10 миллионов долларов США. [3]
Предыстория миссии
[ редактировать ]История
[ редактировать ]В рамках миссии Mars Surveyor '98 искался посадочный модуль для сбора климатических данных с Земли совместно с орбитальным аппаратом. НАСА подозревало, что под тонким слоем пыли на южном полюсе может существовать большое количество замерзшей воды. При планировании полярного спускаемого аппарата на Марс потенциальное содержание воды на южном полюсе Марса было самым сильным определяющим фактором при выборе места посадки. [4] Компакт-диск с именами одного миллиона детей со всего мира был размещен на борту космического корабля в рамках программы «Отправь свое имя на Марс», призванной стимулировать интерес детей к космической программе. [5]
Основными задачами миссии были: [6]
- приземлиться на слоистую местность в южной полярной области Марса;
- поиск доказательств, связанных с древним климатом и недавними периодическими изменениями климата;
- дать представление о современном климате и сезонных изменениях в высоких широтах и, в частности, об обмене водяным паром между атмосферой и землей;
- поиск приповерхностных подземных льдов в полярных регионах и анализ почвы на наличие физически и химически связанных углекислого газа и воды; и
- изучить морфологию поверхности (формы и структуры), геологию, топографию и погоду места посадки.
Зонды Deep Space 2
[ редактировать ]Полярный посадочный модуль Марса нес два небольших идентичных зонда -ударника , известных как «Deep Space 2 A и B». Зонды предназначались для удара о поверхность с высокой скоростью примерно 73 ° ю.ш. 210 ° з.д. / 73 ° ю.ш. 210 ° з.д. для проникновения в марсианский грунт и изучения состава недр на глубину до метра. Однако после входа в марсианскую атмосферу попытки связаться с зондами не увенчались успехом. [4]
Deep Space 2 финансировался в рамках программы «Новое тысячелетие» , а затраты на разработку составили 28 миллионов долларов США. [3]
Конструкция космического корабля
[ редактировать ]Размеры космического корабля составляли 3,6 метра в ширину и 1,06 метра в высоту с полностью развернутыми опорами и солнечными батареями. Основание в основном состояло из алюминиевого сотового настила, композитных графитно-эпоксидных листов, образующих края, и трех алюминиевых ножек. При приземлении ноги должны были разворачиваться из походного положения с помощью пружин сжатия и поглощать силу приземления с помощью сминаемых алюминиевых сотовых вставок в каждой стойке. На палубе посадочного модуля в небольшой тепловой камере Фарадея размещались компьютер, электроника распределения питания и батареи, телекоммуникационная электроника и компоненты тепловой трубы контура капиллярного насоса (КТТ), которые поддерживали рабочую температуру. Каждый из этих компонентов включал в себя резервные блоки на случай выхода из строя одного из них. [4] [1] [7]
Контроль ориентации и движение
[ редактировать ]Во время полета на Марс крейсерская ступень была стабилизирована по трем осям с помощью четырех на гидразиновом монотопливе модулей реактивных двигателей , каждый из которых включал двигатель маневра коррекции траектории мощностью 22 ньютона для движения и двигатель системы управления реакцией тягой 4 ньютона для ориентации (ориентации). Ориентация корабля осуществлялась с помощью резервных солнечных датчиков , звездных трекеров и инерциальных измерительных блоков . [1]
Во время спуска посадочный модуль использовал три группы двигателей с импульсной модуляцией, каждая из которых содержала четыре гидразиновых монотопливных двигателя мощностью 266 ньютонов. Высота во время приземления измерялась доплеровской радиолокационной системой, а подсистема управления ориентацией и шарнирным соединением (AACS) контролировала ориентацию, чтобы гарантировать, что космический корабль приземлится по оптимальному азимуту , чтобы максимизировать сбор солнечной энергии и связь с посадочным модулем. [4] [1] [7]
Посадочный модуль был запущен с двумя гидразиновыми баками, содержащими 64 килограмма топлива и находящимися под давлением гелия . Каждый сферический бак располагался в нижней части посадочного модуля и обеспечивал топливо на этапах полета и спуска. [4] [1] [7]
Коммуникации
[ редактировать ]На этапе полета связь с космическим кораблем осуществлялась в диапазоне X с использованием рупорной антенны среднего усиления и резервных твердотельных усилителей мощности. На случай непредвиденных обстоятельств также была включена всенаправленная антенна с низким коэффициентом усиления. [4]
Первоначально посадочный модуль предназначался для передачи данных через вышедший из строя Mars Climate Orbiter через УВЧ- антенну. После потери орбитального аппарата 23 сентября 1999 года спускаемый аппарат по-прежнему сможет напрямую связываться с сетью дальнего космоса через линию Direct-To-Earth (DTE) — управляемую параболическую антенну со средним усилением X-диапазона , расположенную на колода. В качестве альтернативы Mars Global Surveyor можно использовать в качестве ретранслятора с использованием УВЧ-антенны несколько раз каждый марсианский день. Однако сеть дальнего космоса могла только получать данные от посадочного модуля, но не отправлять команды на него, используя этот метод. Антенна со средним коэффициентом усиления, направленная прямо на Землю, обеспечивала обратный канал со скоростью 12,6 кбит/с и ретрансляционный тракт УВЧ.предоставил обратный канал со скоростью 128 кбит / с. Связь с космическим кораблем будет ограничена часовыми событиями из-за перегрева, который может произойти в усилителях. Количество коммуникационных мероприятий также будет ограничено ограничениями мощности. [4] [6] [1] [7]
Власть
[ редактировать ]Крейсерский этап включал в себя две из арсенида галлия солнечные батареи для питания радиосистемы и питания батарей посадочного модуля, что поддерживало температуру некоторой электроники. [4] [1]
После спуска на поверхность посадочный модуль должен был развернуть две солнечные батареи из арсенида галлия шириной 3,6 метра, расположенные по обе стороны от космического корабля. Еще две вспомогательные солнечные батареи были расположены сбоку, чтобы обеспечить дополнительную мощность в общей сложности на ожидаемые 200 Вт и примерно восемь-девять часов рабочего времени в день. [4] [1]
Хотя Солнце не зашло бы за горизонт во время основной миссии, слишком мало света достигло бы солнечных батарей, чтобы оставаться достаточно теплыми для продолжения работы определенной электроники. 16 ампер-часов Чтобы избежать этой проблемы, в комплект поставки была включена никель-гидридная батарея емкостью для подзарядки в течение дня и питания обогревателя тепловой камеры в ночное время. Ожидалось, что это решение также ограничит срок службы спускаемого аппарата. Поскольку в конце лета марсианские дни станут холоднее, на обогреватель будет подаваться слишком мало энергии, чтобы избежать замерзания, в результате чего батарея также замерзнет, что будет сигнализировать об окончании срока службы посадочного модуля. [4] [1] [7]
Научные инструменты
[ редактировать ] Камера спуска с Марса
Камера спуска с Марса Стереоповерхностный имиджер
Стереоповерхностный имиджер ЛИДАР
ЛИДАР Роботизированная рука
Роботизированная рука Роботизированная камера-манипулятор
Роботизированная камера-манипулятор Метеорологический пакет
Метеорологический пакет Термический анализатор и анализатор выделенных газов
Термический анализатор и анализатор выделенных газов Марс микрофон
Марс микрофон








 Аннотированная схема космического корабля Mars Polar Lander
Аннотированная схема космического корабля Mars Polar Lander Космический корабль в походном положении непосредственно перед капсулированием.
Космический корабль в походном положении непосредственно перед капсулированием. Испытания проведены в Центре сборки и герметизации космических аппаратов.
Испытания проведены в Центре сборки и герметизации космических аппаратов. Входная капсула Mars Polar Lander перед установкой на Star 48. верхнюю ступень
Входная капсула Mars Polar Lander перед установкой на Star 48. верхнюю ступень




- Камера спуска с Марса (MARDI)
- Камера, установленная в нижней части посадочного модуля, предназначалась для съемки 30 изображений во время спуска космического корабля на поверхность. Полученные изображения будут использоваться для предоставления географического и геологического контекста места приземления. [8]
- Поверхностный стереоизображитель (SSI)
- С помощью пары устройств с зарядовой связью (CCD) стереопанорамная камера была установлена на мачте высотой один метр и помогала анализатору термического выделенного газа определять области, представляющие интерес для роботизированной руки. Кроме того, камера будет использоваться для оценки плотности столба атмосферной пыли, оптической толщины аэрозолей и содержания наклонного столба водяного пара с использованием узкополосных изображений Солнца. [9]
- Обнаружение света и определение дальности (ЛИДАР)
- Прибор лазерного зондирования предназначался для обнаружения и характеристики аэрозолей в атмосфере на высоте до трех километров над посадочным модулем. Прибор работал в двух режимах: активном режиме с использованием входящего в комплект лазерного диода и акустическом режиме с использованием Солнца в качестве источника света для датчика. В активном режиме лазерный зонд должен был излучать в атмосферу 100-наносекундные импульсы на длине волны 0,88 микрометра, а затем фиксировать продолжительность времени для обнаружения света, рассеянного аэрозолями. Продолжительность времени, необходимая для возвращения света, затем можно будет использовать для определения количества льда, пыли и других аэрозолей в регионе. В акустическом режиме прибор измеряет яркость неба, освещенного Солнцем, и фиксирует рассеяние света при его прохождении к датчику. [10]
- Роботизированная рука (РА)
- Роботизированная рука, расположенная в передней части посадочного модуля, представляла собой алюминиевую трубку метровой длины с локтевым шарниром и прикрепленным к концу шарнирным ковшом. Совок предназначался для копания грунта в непосредственной близости от посадочного модуля. Затем почву можно будет проанализировать в совке с помощью камеры-манипулятора или перенести в термический анализатор выделяющихся газов. [9]
- Роботизированная камера-манипулятор (RAC)
- Расположенная на роботизированной руке камера с зарядовой связью включала две красные, две зеленые и четыре синие лампы для освещения образцов почвы для анализа. [9]
- Метеорологический пакет (МЕТ)
- В комплект входило несколько инструментов, связанных с зондированием и записью погодных условий. Датчики ветра, температуры, давления и влажности были расположены на роботизированной руке и двух развертываемых мачтах: главной мачте длиной 1,2 метра , расположенной на вершине посадочного модуля, и вспомогательной подмачте длиной 0,9 метра , которая разворачивалась вниз для получения измерений, близких к земля. [9]
- Термический анализатор выделенных газов (TEGA)
- Прибор был предназначен для измерения содержания воды, водяного льда, адсорбированного углекислого газа, кислорода и летучих минералов в поверхностных и подземных образцах почвы, собранных и переданных роботизированной рукой. Материалы, помещенные на решетку внутри одной из восьми печей, будут нагреваться и испаряться при температуре 1000 °C. Усовершенствованный газоанализатор затем будет записывать измерения с помощью спектрометра и электрохимической ячейки. Для калибровки пустая печь также будет нагреваться во время этого процесса для дифференциальной сканирующей калориметрии . Разница в энергии, необходимой для нагрева каждой печи, будет указывать на концентрацию водяного льда и других минералов, содержащих воду или углекислый газ. [9]
- Марс микрофон
- Микрофон должен был стать первым инструментом для записи звуков на другой планете. Предполагалось, что инструмент, в основном состоящий из микрофона, обычно используемого со слуховыми аппаратами , будет записывать звуки летящей пыли, электрические разряды и звуки работающего космического корабля в 12-битных сэмплах длительностью 2,6 или 10,6 секунды. [11] Микрофон был построен с использованием готовых деталей, включая интегральную схему Sensory, Inc. RSC-164, обычно используемую в устройствах распознавания речи. [12]
Профиль миссии
[ редактировать ]| Хронология наблюдений | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||
Запуск и траектория
[ редактировать ]Марсианский полярный посадочный модуль был запущен 3 января 1999 года в 20:21:10 по всемирному координированному времени Национальным управлением по аэронавтике и исследованию космического пространства с космодрома 17B на базе ВВС на мысе Канаверал во Флориде на борту Delta II ракеты-носителя 7425–9,5. Полная последовательность горения длилась 47,7 минут после того, как твердотопливный ускоритель третьей ступени Thiokol Star 48 B вывел космический корабль на 11-месячную траекторию перехода к Марсу с конечной скоростью 6,884 километра в секунду относительно Марса. Во время полета космический корабль находился внутри капсулы с аэродинамической оболочкой , а сегмент, известный как ступень круиза, обеспечивал электроэнергию и связь с Землей. [4] [6] [1]
 Запустить диаграмму конфигурации.
Запустить диаграмму конфигурации. Фотография запуска Mars Polar Lander на борту ракеты-носителя Delta II.
Фотография запуска Mars Polar Lander на борту ракеты-носителя Delta II. Схема межпланетной траектории марсианского полярного модуля.
Схема межпланетной траектории марсианского полярного модуля.



Зона приземления
[ редактировать ]Целевой зоной приземления была область вблизи южного полюса Марса, называемая Ultimi Scopuli , поскольку там было большое количество скопул ( лопастных или неправильных уступов ). [ нужна ссылка ]
Попытка приземления
[ редактировать ]


3 декабря 1999 года Mars Polar Lander прибыл на Марс, и операторы миссии начали подготовку к посадке. В 14:39:00 по всемирному координированному времени этап крейсерского полета был прекращен, что привело к запланированному отключению связи, которое продлилось до тех пор, пока космический корабль не приземлился на поверхность. За шесть минут до входа в атмосферу запрограммированный 80-секундный запуск двигателя повернул космический корабль в правильную ориентацию входа, при этом тепловой экран был расположен так, чтобы поглощать тепло температурой 1650 ° C, которое будет генерироваться при прохождении спускаемой капсулы через атмосферу.
Двигаясь со скоростью 6,9 километров в секунду, входная капсула вошла в атмосферу Марса в 20:10:00 UTC и должна была приземлиться в окрестностях Марса. 76 ° ю.ш. 195 ° з.д. / 76 ° ю.ш. 195 ° з.д. в регионе, известном как Planum Australe . Восстановление связи ожидалось в 20:39:00 UTC после приземления. Однако связь восстановить не удалось, и посадочный модуль был признан потерянным. [4] [6] [1]
25 мая 2008 года посадочный модуль «Феникс» прибыл на Марс и впоследствии выполнил большинство задач Марсианского полярного посадочного модуля , неся с собой несколько таких же или производных инструментов.

 Кликабельное изображение: при нажатии на метки откроется новая статья.
Кликабельное изображение: при нажатии на метки откроется новая статья. Предполагаемые операции
[ редактировать ]Двигаясь со скоростью примерно 6,9 км/сек и на высоте 125 км над поверхностью, космический корабль вошел в атмосферу и первоначально замедлился с помощью 2,4-метрового абляционного теплового экрана , расположенного в нижней части входного корпуса, для аэродинамического торможения на высоте 116 километров атмосферы. Через три минуты после входа космический корабль замедлился до 496 метров в секунду, сигнализируя о раскрытии 8,4-метрового полиэфирного парашюта из миномета, после чего немедленно последовало отделение теплового экрана и включение MARDI, находясь на высоте 8,8 км над поверхностью. Парашют еще больше замедлил скорость космического корабля до 85 метров в секунду, когда наземный радар начал отслеживать особенности поверхности, чтобы определить наилучшее место приземления и определить вертикальную скорость с помощью эффекта Доплера для управления тягой.
Когда космический корабль замедлился до 80 метров в секунду, через минуту после раскрытия парашюта, спускаемый аппарат отделился от корпуса и начал механический спуск на высоте 1,3 километра. Предполагалось, что вертикальная скорость упадет до 2,4 метра в секунду на высоте 12 м, а затем будет постоянной до приземления. Ниже 40 метров радар становился ненадежным из-за поднятой пыли и отключался уже на этой высоте — последние секунды тяга контролировалась инерциальными датчиками. На 40 метрах также была включена функция отключения тяги сразу при приземлении. Приземление ожидалось в 20:01 UTC, что соответствует 20:15 «времени приема Земли». [4] [6] [1] [7]
Операции посадки должны были начаться через пять минут после приземления, сначала разложив уложенные солнечные батареи, а затем направив антенну среднего усиления, направленную прямо на Землю, чтобы обеспечить первую связь с сетью дальнего космоса . На Землю должна была быть передана 45-минутная передача, содержащая 30 изображений приземления, полученных MARDI. Поступление сигнала об успешной посадке ожидалось в 20:39 UTC. Затем посадочный модуль выключится на шесть часов, чтобы дать возможность батареям зарядиться. В последующие дни операторы проверят приборы космического корабля, а научные эксперименты должны были начаться 7 декабря и продлиться как минимум следующие 90 марсианских солов с возможностью продления миссии. [4] [6] [1] [7]
Потеря связи
[ редактировать ]3 декабря 1999 года, в 14:39:00 по всемирному координированному времени, была отправлена последняя телеметрия с полярного посадочного модуля Марса , незадолго до отделения ступени крейсерского полета и последующего входа в атмосферу. Никаких дальнейших сигналов от космического корабля получено не было. предпринял попытки Mars Global Surveyor сфотографировать место, в котором предположительно находился спускаемый аппарат. Был виден объект, предположительно посадочный модуль. Однако последующая визуализация в сентябре 2005 г. привела к исключению идентифицированного объекта. Марсианский полярный посадочный модуль остается потерянным. [13] [14]
Причина потери связи неизвестна. Однако Комиссия по рассмотрению отказов пришла к выводу, что наиболее вероятной причиной аварии была ошибка программного обеспечения, которая неправильно идентифицировала вибрации, вызванные развертыванием походных опор, как приземление на поверхность. [15] Результатом действия космического корабля стало отключение спускаемых двигателей, хотя он, вероятно, все еще находился на высоте 40 метров над поверхностью. Хотя было известно, что развертывание ног может привести к ложным показаниям, инструкции по проектированию программного обеспечения не учитывали этот случай. [16]
Помимо преждевременного отключения спускаемых двигателей, Комиссия по рассмотрению отказов также оценила другие потенциальные виды отказов. [2] Из-за отсутствия существенных доказательств характера отказа нельзя исключить следующие возможности:
- состояние поверхности превышает возможности конструкции посадки;
- потеря управления из-за динамических воздействий;
- посадочная площадка непригодна для выживания;
- посадочный модуль с корпусом/парашютом;
- потеря управления из-за смещения центра масс; или
- теплозащитный экран выходит из строя из-за удара микрометеороида .
Авария Mars Polar Lander произошла через два с половиной месяца после гибели Mars Climate Orbiter . Недостаточное финансирование и плохое управление были названы основными причинами неудач. [17] По словам Томаса Янга, председателя группы независимой оценки Марсианской программы, программа «недофинансировалась как минимум на 30%». [18]
| Цитата из отчета [2] |
|---|
«На каждой из трех посадочных опор предусмотрен магнитный датчик, который определяет приземление, когда спускаемый аппарат касается поверхности, инициируя выключение спускаемых двигателей. Данные испытаний развертывания блока инженерных разработок MPL, испытаний развертывания летного модуля MPL и развертывания Марса 2001. возникает ложная индикация приземления Испытания показали, что в датчике приземления на эффекте Холла во время развертывания посадочной опоры (когда посадочный модуль подключен к парашюту. Логика программного обеспечения воспринимает этот переходный сигнал как действительное событие приземления, если он сохраняется в течение двух последовательных показаний). Испытания датчика показали, что большинство переходных сигналов при развертывании опоры действительно достаточно продолжительны, чтобы быть принятыми как действительные события, поэтому почти наверняка по крайней мере один из трех сгенерировал бы ложную индикацию приземления, которую приняло программное обеспечение. как действительный. Программное обеспечение, предназначенное для игнорирования индикации приземления до включения логики обнаружения приземления, не было реализовано должным образом, и ложная индикация приземления сохранилась. Логика определения приземления активируется на высоте 40 метров, и в это время программное обеспечение должно было бы выдать прекращение тяги спускаемого двигателя в ответ на (ложное) указание на приземление. На высоте 40 метров посадочный модуль имеет скорость примерно 13 метров в секунду, которая в отсутствие тяги ускоряется гравитацией Марса до скорости удара о поверхность примерно 22 метра в секунду (номинальная скорость приземления 2,4 метра в секунду). второй). При такой скорости удара посадочный модуль не смог бы выжить». |
Последствия
[ редактировать ]Несмотря на неудачу посадочного модуля на Марсе, Planum Australe , который служил целью исследования для посадочного модуля и двух зондов Deep Space 2 , [19] в последующие годы будет исследован радаром MARSIS Европейского космического агентства , который исследовал и проанализировал это место с орбиты Марса. [20] [21] [22] [23]
См. также
[ редактировать ]- Посадочный модуль Mars Surveyor 2001 , посадочный модуль аналогичной конструкции, миссия отменена. Посадочный модуль использовался для Феникса.
- «Феникс» Посадочный модуль , 2008 г.
- Исследование Марса
- ЭкзоМарс марсоход
- Список миссий на Марс
- научной лаборатории Марса Марсоход
Ссылки
[ редактировать ]- ^ Перейти обратно: а б с д и ж г час я дж к л м «Марсианский полярный посадочный модуль» . nssdc.gsfc.nasa.gov . НАСА . Проверено 1 декабря 2022 г.
- ^ Перейти обратно: а б с «Отчет о потере миссии «Полярный посадочный модуль на Марс» и «Дальний космос 2 » (PDF) . НАСА / Лаборатория реактивного движения . 22 марта 2000 г. Архивировано из оригинала (PDF) 16 марта 2011 г.
- ^ Перейти обратно: а б «Стоимость миссии полярного спускаемого аппарата на Марс» . Ассошиэйтед Пресс . 8 декабря 1999 г. Архивировано из оригинала 17 февраля 2022 г. . Проверено 30 сентября 2020 г.
- ^ Перейти обратно: а б с д и ж г час я дж к л м н «Марсианские миссии 1998 года» (PDF) (пресс-релиз). НАСА / Лаборатория реактивного движения . Декабрь 1998 г. Архивировано из оригинала (Press Kit) 30 апреля 2020 г. . Проверено 12 марта 2011 г.
- ^ Бен Ху (3 марта 1998 г.). «Имена детей отправляются на Марс» . Солнечный страж . Архивировано из оригинала 2 декабря 2013 года . Проверено 30 мая 2013 г.
- ^ Перейти обратно: а б с д и ж «Марсианский полярный посадочный модуль/Deep Space 2» (PDF) (пресс-релиз). НАСА / Лаборатория реактивного движения . Декабрь 1999 г. Архивировано из оригинала (Press Kit) 23 декабря 2016 г. . Проверено 12 марта 2011 г.
- ^ Перейти обратно: а б с д и ж г «Полярный посадочный модуль на Марс / Глубокий космос 2 — Наука НАСА» . science.nasa.gov . НАСА . Проверено 12 марта 2011 г.
- ^ «Марсианский полярный посадочный модуль: Mars Descent Imager (MARDI)» . nssdc.gsfc.nasa.gov . НАСА . Проверено 17 марта 2011 г.
- ^ Перейти обратно: а б с д и «Полярный посадочный модуль Марса: исследователь летучих веществ и климата Марса (MVACS)» . nssdc.gsfc.nasa.gov . НАСА . Проверено 17 марта 2011 г.
- ^ «Марсианский полярный посадочный модуль: обнаружение света и определение дальности (ЛИДАР)» . nssdc.gsfc.nasa.gov . НАСА . Проверено 17 марта 2011 г.
- ^ «Марсианский полярный посадочный модуль: марсианский микрофон» . nssdc.gsfc.nasa.gov . НАСА . Проверено 17 марта 2011 г.
- ^ «Проекты: Планетарные микрофоны — Марсианский микрофон» . Планетарное общество . Архивировано из оригинала 18 августа 2006 года.
- ^ «Наконец-то найден полярный посадочный модуль на Марс?» . Небо и телескоп . 6 мая 2005 г. Архивировано из оригинала 23 июля 2008 г. Проверено 22 апреля 2009 г.
- ^ «Марсианский полярный посадочный модуль НЕ найден» . www.msss.com . НАСА / Лаборатория реактивного движения . 17 октября 2005 г. MGS-MOC2-1253. Архивировано из оригинала 7 декабря 2008 года . Проверено 22 апреля 2009 г.
- ^ НАСА 3: Провалы миссии на YouTube
- ^ Нэнси Дж. Левесон (июль 2004 г.). «Роль программного обеспечения в недавних авиакосмических катастрофах» (PDF) . Журнал космических кораблей и ракет . 41 (4). дои : 10.2514/1.11950 .
- ^ Томас Янг (13 марта 2000 г.). Сводный отчет группы независимой оценки Марсианской программы (отчет). Проект №7. Комитет Палаты представителей по науке и технологиям . Проверено 22 апреля 2009 г.
{{cite report}}: CS1 maint: статус URL ( ссылка ) - ^ Джеффри Кэй (14 апреля 2000 г.). «НАСА в горячем кресле» . NewsHour с Джимом Лерером . ПБС . Архивировано из оригинала (расшифровка) 26 декабря 2013 года . Проверено 22 апреля 2009 г.
- ^ Бен Эванс (6 января 2019 г.). « « Не мог выжить »: 20 лет со дня злополучного полярного спускаемого аппарата НАСА на Марс» . АмерикаКосмос . Проверено 15 апреля 2022 г.
- ^ Р. Оросей; С.Э. Лауро; Э. Петтинелли; А. Чикетти; М. Корадини; и др. (25 июля 2018 г.). «Радиолокационные доказательства наличия подледной жидкой воды на Марсе» . Наука . 361 (6401): 490–493. arXiv : 2004.04587 . Бибкод : 2018Sci...361..490O . дои : 10.1126/science.aar7268 . hdl : 11573/1148029 . ПМИД 30045881 .
- ^ Кеннет Чанг; Деннис Овербай (25 июля 2018 г.). «На Марсе обнаружено водянистое озеро, повышающее вероятность существования инопланетной жизни» . Нью-Йорк Таймс . Проверено 15 апреля 2022 г.
- ^ «Под поверхностью Марса обнаружен огромный резервуар жидкой воды» . ЭврекАлерт . 25 июля 2018 года . Проверено 15 апреля 2022 г.
- ^ Мэри Хэлтон (25 июля 2018 г.). «На Марсе обнаружено жидкое водное озеро» . Новости Би-би-си . Проверено 15 апреля 2022 г.
Дальнейшее чтение
[ редактировать ]- Майкл К. Малин (июль 2005 г.). «Спрятано на виду: в поисках марсианских посадочных модулей». Небо и телескоп . 110 (7): 42–46. Бибкод : 2005S&T...110a..42M . ISSN 0037-6604 .



- Миссии на Марс
- Космические зонды НАСА
- Заброшенные посадочные модули (космический корабль)
- Четырехугольник Южного моря
- Космический корабль запущен в 1999 году.
- Космический корабль, запущенный ракетами Delta II
- Космические катастрофы и инциденты в США
- Прикрепленный космический корабль
- 1999 год на Марсе