Марсианская научная лаборатория
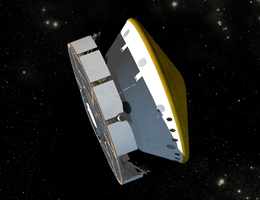 Круизная конфигурация MSL | |
| Тип миссии | Марсоход |
|---|---|
| Оператор | НАСА |
| ИДЕНТИФИКАТОР КОСПЭРЭ | 2011-070А |
| САТКАТ нет. | 37936 |
| Веб-сайт | http://mars.jpl.nasa.gov/msl/ |
| Продолжительность миссии | Первичный: 669 марсианских солов. (687 дней) Время с момента приземления: 11 лет, 10 месяцев, 26 дней (4233 сол). |
| Свойства космического корабля | |
| Производитель | Лаборатория реактивного движения |
| Стартовая масса | 3839 кг (8463 фунта) [1] |
| Начало миссии | |
| Дата запуска | 26 ноября 2011 г., 15:02:00.211 UTC [2] [3] [4] |
| Ракета | Atlas V 541 (AV-028) |
| Запуск сайта | Мыс Канаверал SLC-41 [5] |
| Подрядчик | Объединенный стартовый альянс |
| Марсоход | |
| Дата посадки | 6 августа 2012 г., 05:17 UTC (11 лет, 10 месяцев и 27 дней назад ) |
| Посадочная площадка | Приземление Брэдбери в кратере Гейла 4 ° 35'22 "ю.ш., 137 ° 26'30" в.д. / 4,5895 ° ю.ш., 137,4417 ° в.д. [6] [7] |
| Пройденное расстояние | 30,00 км (18,64 миль) на Марсе по состоянию на 30 мая 2023 г. [update][8] |

Марсианская научная лаборатория ( MSL ) — это автоматический космический зонд на Марс, запущенный НАСА 26 ноября 2011 года. [2] который успешно приземлил Curiosity марсоход 6 в кратере Гейла августа 2012 года. [3] [9] [10] [11] Марса Общие цели включают исследование обитаемости , изучение его климата и геологии , а также сбор данных для миссии человека на Марс . [12] На борту марсохода находится множество научных инструментов, разработанных международной командой. [13]
Обзор [ править ]

MSL успешно осуществила самую точную посадку на Марс из всех известных на тот момент космических кораблей, поразив небольшой эллипс приземления размером всего 7 на 20 км (4,3 на 12,4 мили). [14] в районе Эолиды Палуса кратера Гейла. В этом случае MSL совершил приземление в 2,4 км (1,5 мили) к востоку и в 400 м (1300 футов) к северу от центра цели. [15] [16] Эта локация находится недалеко от горы Эолис Монс (она же «Гора Шарп»). [17] [18] Миссия марсохода рассчитана на исследование в течение как минимум 687 земных дней (1 марсианский год) на расстоянии 5 на 20 км (3,1 на 12,4 мили). [19]
Миссия Марсианской научной лаборатории является частью программы НАСА по исследованию Марса , долгосрочной программы по роботизированному исследованию Марса , которой управляет Лаборатория реактивного движения Калифорнийского технологического института . Общая стоимость проекта MSL составляет около 2,5 миллиардов долларов США. [20] [21]
Предыдущие успешные марсоходы США включают Sojourner из миссии Mars Pathfinder и для исследования Марса марсоходы Spirit и Opportunity . «Любопытство» примерно в два раза длиннее и в пять раз тяжелее «Духа» и «Оппортьюнити» . [22] и несет в себе в десять раз больше научных инструментов. [23]
Цели и задачи [ править ]

места посадки, Миссия MSL преследует четыре научные цели: определить обитаемость включая роль воды , изучение климата и геологии Марса . Это также полезная подготовка к будущей миссии человека на Марс .
Для достижения этих целей MSL ставит перед собой восемь основных научных задач: [24]
- Биологический
- (1) Определить природу и количество органических соединений углерода.
- (2) Изучить химические строительные блоки жизни (углерод, водород, азот, кислород, фосфор и сера).
- (3) Определить особенности, которые могут отражать эффекты биологических процессов ( биосигнатуры ).
- Геолого-геохимический
- (4) Исследование химического, изотопного и минералогического состава марсианской поверхности и приповерхностных геологических материалов.
- (5) Интерпретировать процессы, которые сформировали и изменили горные породы и почвы.
- Планетарный процесс
- (6) Оценить долговременные (т.е. 4 миллиарда лет) марсианской атмосферы. процессы эволюции
- (7) Определить современное состояние, распределение и круговорот воды и углекислого газа.
- Поверхностное излучение
- (8) Охарактеризуйте широкий спектр поверхностного излучения, включая космическое излучение , явления солнечных частиц и вторичные нейтроны . В рамках исследования он также измерил радиационное воздействие внутри космического корабля, направлявшегося на Марс, и продолжает измерения радиации во время исследования поверхности Марса. Эти данные будут важны для будущей миссии человека . [25]
Примерно через год после начала миссии на поверхность и после оценки того, что древний Марс мог быть пригоден для микробной жизни, цели миссии MSL превратились в разработку прогнозирующих моделей процесса сохранения органических соединений и биомолекул ; раздел палеонтологии, называемый тафономией . [26]
Технические характеристики [ править ]
Космический корабль [ править ]


Полетная система космического корабля имела массу при запуске 3893 кг (8583 фунта) и состояла из крейсерской ступени Земля-Марс (539 кг (1188 фунтов)), системы входа-спуска-посадки (EDL) (2401 кг (5293 фунта) фунтов), включая 390 кг (860 фунтов) посадочного топлива ) и мобильный вездеход массой 899 кг (1982 фунта) со встроенным пакетом приборов. [1] [27]
Космический корабль MSL включает в себя инструменты, предназначенные для космического полета, а также использует один из инструментов марсохода — детектор оценки радиации (RAD) — во время космического полета на Марс.
- Прибор MSL EDL (MEDLI): Основная цель проекта MEDLI — измерение аэротермической среды, реакции материала подповерхностного теплозащитного экрана, ориентации транспортного средства и плотности атмосферы. [28] Комплекс приборов MEDLI был установлен в теплозащитном стекле входного автомобиля MSL. Полученные данные будут использоваться в будущих миссиях на Марс, предоставляя измеренные данные об атмосфере для проверки моделей атмосферы Марса и уточнения возможностей конструкции спускаемого аппарата для будущих миссий на Марс. Приборы MEDLI состоят из трех основных подсистем: интегрированных датчиков MEDLI (MISP), системы данных об атмосфере Марса (MEADS) и электроники поддержки датчиков (SSE).
Ровер [ править ]
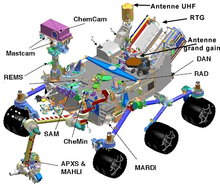
Марсоход Curiosity имеет массу 899 кг (1982 фунта), может двигаться со скоростью до 90 м (300 футов) в час на своей шестиколесной качающейся тележке, приводится в действие многоцелевым радиоизотопным термоэлектрическим генератором (MMRTG) и осуществляет связь как в X-диапазоне , так и в диапазонах УВЧ.
- Компьютеры: два идентичных бортовых компьютера вездехода, называемые «Rover Compute Element» (RCE), содержат радиационно-стойкую память, позволяющую выдерживать экстремальное излучение из космоса и защищать от циклических отключений питания. компьютера включает 256 КБ EEPROM и , 256 МБ DRAM Память каждого 2 ГБ флэш -памяти . [29] Это сопоставимо с 3 МБ EEPROM, 128 МБ DRAM и 256 МБ флэш-памяти, используемыми в марсоходах. [30]
- Компьютеры RCE используют RAD750 процессор (преемник процессора RAD6000, используемого в марсоходах), работающий на частоте 200 МГц. [31] [32] [33] Процессор RAD750 обеспечивает производительность до 400 MIPS , а процессор RAD6000 — до 35 MIPS. [34] [35] Из двух бортовых компьютеров один настроен как резервный, и возьмет на себя управление в случае проблем с основным компьютером. [29]
- Ровер оснащен блоком инерциальных измерений (IMU), который предоставляет трехосную информацию о его положении, которая используется в навигации ровера. [29] Компьютеры марсохода постоянно контролируют работу марсохода, например, регулируя его температуру. [29] Такие действия, как фотографирование, вождение и работа с инструментами, выполняются в виде последовательности команд, которая отправляется от летной команды на марсоход. [29]
Компьютеры марсохода работают под управлением VxWorks , операционной системы реального времени от Wind River Systems . Во время полета на Марс VxWorks запускал приложения, предназначенные для фазы навигации и управления миссией, а также имел заранее запрограммированную последовательность программного обеспечения для решения сложных задач входа-спуска-посадки. После приземления приложения были заменены программным обеспечением для передвижения по поверхности и выполнения научной деятельности. [36] [37] [38]


- Связь: Curiosity оснащен несколькими средствами связи для резервирования. Малый X-диапазона транспондер дальнего космоса для связи непосредственно с Землей через сеть дальнего космоса НАСА. [39] и UHF Electra -Lite программно-определяемая радиостанция для связи с орбитальными аппаратами Марса. [27] : 46 Система X-диапазона имеет одну радиостанцию с усилителем мощности 15 Вт и две антенны: всенаправленную антенну с низким коэффициентом усиления, которая может связываться с Землей на очень низких скоростях передачи данных (15 бит/с на максимальной дальности), независимо от ориентации марсохода. и антенна с высоким коэффициентом усиления, которая может передавать данные на скорости до 32 кбит/с, но должна быть направлена. Система УВЧ имеет две радиостанции (мощность передачи около 9 Вт). [27] : 81 ), использующая одну всенаправленную антенну. Он может связываться с орбитальным аппаратом Mars Reconnaissance Orbiter (MRO) и орбитальным аппаратом Mars Odyssey 2001 года (ODY) на скоростях до 2 Мбит/с и 256 кбит/с соответственно, но каждый орбитальный аппарат может общаться с Curiosity только около 8 минут в секунду. день. [40] Орбитальные аппараты имеют более крупные антенны и более мощные радиоприемники и могут передавать данные на Землю быстрее, чем марсоход напрямую. Таким образом, большая часть данных, возвращаемых Curiosity (MSL), передается через ретрансляционные каналы УВЧ с MRO и ODY. Возврат данных в течение первых 10 дней составил примерно 31 мегабайт в день.
- Обычно 225 кбит/день команд передаются на марсоход непосредственно с Земли со скоростью передачи данных 1–2 кбит/с в течение 15-минутного (900-секундного) окна передачи, в то время как большие объемы данных, собираемые марсоходом, возвращаются через спутниковый ретранслятор. [27] : 46 Задержка односторонней связи с Землей варьируется от 4 до 22 минут, в зависимости от взаимного положения планет, в среднем 12,5 минут. [41]
- При приземлении телеметрию контролировали орбитальный аппарат Mars Odyssey 2001 года , Mars Reconnaissance Orbiter ЕКА и Mars Express . «Одиссей» способен передавать телеметрию УВЧ обратно на Землю в режиме реального времени. Время эстафеты варьируется в зависимости от расстояния между двумя планетами и на момент приземления составляло 13:46 минут. [42] [43]
- Системы мобильности: Curiosity оснащен шестью колесами с качающейся тележкой , которая также служила шасси для автомобиля, в отличие от его меньших предшественников. [44] [45] Колеса значительно больше (диаметр 50 сантиметров (20 дюймов)), чем те, которые использовались на предыдущих марсоходах. Каждое колесо имеет шипы, независимо приводится в действие и приводится в движение, что позволяет преодолевать подъемы по мягкому песку и карабкаться по камням. Четыре угловых колеса могут управляться независимо, что позволяет автомобилю поворачивать на месте, а также выполнять повороты по дуге. [27] Каждое колесо имеет рисунок, который помогает ему сохранять сцепление с дорогой и оставляет узорчатые следы на песчаной поверхности Марса. Этот шаблон используется бортовыми камерами для оценки пройденного расстояния. Сам шаблон представляет собой азбуку Морзе для « JPL » ( •--- •--• •-•• ). [46] Судя по центру масс, аппарат может выдерживать наклон не менее 50 градусов в любую сторону без опрокидывания, однако автоматические датчики не позволят марсоходу наклоняться более чем на 30 градусов. [27]
Инструменты [ править ]
| Основные инструменты |
|---|
| APXS - Рентгеновский спектрометр альфа-частиц |
| ChemCam – Комплекс химии и камеры |
| CheMin – Химия и минералогия |
| ДАН – Динамическое альбедо нейтронов |
| Hazcam – камера предотвращения опасностей |
| MAHLI – Mars Hand Lens Imager |
| MARDI - Устройство визуализации спуска с Марса |
| MastCam – Мачтовая камера |
| MEDLI – Инструмент MSL EDL |
| Navcam – навигационная камера |
| RAD - Детектор оценки радиации |
| REMS – Роверская станция мониторинга окружающей среды |
| SAM – Анализ проб на Марсе |

Общая стратегия анализа начинается с камер высокого разрешения для поиска интересующих объектов. Если какая-то конкретная поверхность представляет интерес, Curiosity может испарить небольшую ее часть с помощью инфракрасного лазера и изучить полученный спектр, чтобы узнать элементный состав породы. Если эта подпись заинтригует, марсоход будет использовать свою длинную руку, чтобы покачиваться над микроскопом и рентгеновским спектрометром, чтобы рассмотреть объект поближе. Если образец требует дальнейшего анализа, Curiosity может просверлить валун и доставить порошкообразный образец либо в SAM , либо в аналитическую лабораторию CheMin внутри марсохода. [47] [48] [49]
- Рентгеновский спектрометр альфа-частиц (APXS): это устройство может облучать образцы альфа-частицами и отображать спектры рентгеновских лучей для определения элементного состава образцов. повторно излучаемых
- CheMin : CheMin — сокращение от «Химия и минералогия» и представляет собой рентгеновский дифракционный и рентгенофлуоресцентный анализатор. [50] [51] [52] Он позволит идентифицировать и количественно оценить минералы, присутствующие в горных породах и почве, и тем самым оценить участие воды в их формировании, отложении или изменении. [51] Кроме того, данные CheMin будут полезны при поиске потенциальных минеральных биосигнатур , источников энергии для жизни или индикаторов прошлой обитаемой среды. [50] [51]
- Анализ проб на Марсе (SAM). Набор инструментов SAM будет анализировать органику и газы как из атмосферных, так и из твердых проб. [48] [49] Сюда входят соотношения изотопов кислорода и углерода в углекислом газе (CO 2 ) и метане (CH 4 ) в атмосфере Марса , чтобы различить их геохимическое или биологическое происхождение. [48] [53] [54] [55] [56]

- Детектор оценки радиации (RAD): этот прибор был первым из десяти включенных приборов MSL. Как на пути, так и на поверхности планеты он будет характеризовать широкий спектр излучения , встречающегося в марсианской среде. Включенный после запуска, он зафиксировал несколько всплесков радиации, вызванных Солнцем. [60] 31 мая 2013 года ученые НАСА сообщили, что возможная миссия человека на Марс может быть связана с большим радиационным риском, исходя из количества излучения энергичных частиц , обнаруженного RAD в Марсианской научной лаборатории во время путешествия с Земли на Марс в 2011–2012 годах. . [57] [58] [59]

- Динамическое альбедо нейтронов (DAN): импульсный источник нейтронов и детектор для измерения водорода , льда и воды на поверхности Марса или вблизи нее. [61] [62] 18 августа 2012 года (12 сол.) был включен российский научный прибор ДАН. [63] ознаменовав успех российско-американского сотрудничества на поверхности Марса и первый работающий российский научный прибор на поверхности Марса с тех пор, как Марс-3 прекратил передачу данных более сорока лет назад. [64] Прибор предназначен для обнаружения подземных вод. [63]
- Роверская станция мониторинга окружающей среды (REMS): метеорологический комплекс и ультрафиолетовый датчик, предоставленные Испанией и Финляндией . [65] Он измеряет влажность, давление, температуру, скорость ветра и ультрафиолетовое излучение. [65]
- Камеры: Всего у Curiosity семнадцать камер. [66] 12 инженерных камер (Hazcams и Navcams) и пять научных камер. Камеры MAHLI, MARDI и MastCam были разработаны компанией Malin Space Science Systems , и все они имеют общие конструктивные компоненты, такие как встроенные блоки электронной обработки изображений 1600×1200 , ПЗС-матрицы и шаблонный фильтр RGB Байера . [67] [68] [69] [70] [71] [72]
- MastCam : эта система обеспечивает получение изображений нескольких спектров и полноцветных изображений с помощью двух камер.
- Mars Hand Lens Imager (MAHLI) : эта система состоит из камеры, установленной на роботизированной руке марсохода и используемой для получения микроскопических изображений горных пород и почвы. Для освещения имеются белые и ультрафиолетовые светодиоды.
- ChemCam: разработанная Роджером Винсом система инструментов дистанционного зондирования, используемая для эрозии поверхности Марса на расстоянии до 10 метров и измерения различных компонентов, составляющих землю. [73] Полезная нагрузка включает в себя первую систему спектроскопии лазерно-индуцированного пробоя (LIBS), которая будет использоваться в планетарных науках, и научную камеру Curiosity пятую — удаленный микровизуализатор (RMI). RMI обеспечивает черно-белые изображения с разрешением 1024×1024 и полем зрения 0,02 радиана (1,1 градуса). [74] Это примерно эквивалентно объективу с фокусным расстоянием 1500 мм на 35-мм камере.
- Mars Descent Imager (MARDI) : во время части спуска на поверхность Марса MARDI получал 4 цветных изображения в секунду с разрешением 1600×1200 пикселей и временем экспозиции 0,9 миллисекунды. Изображения делались 4 раза в секунду, начиная незадолго до отделения теплозащитного экрана на высоте 3,7 км и вплоть до нескольких секунд после приземления. Это предоставило инженерную информацию как о движении марсохода во время процесса спуска, так и научную информацию о местности, непосредственно окружающей марсоход. НАСА закрыло проект MARDI в 2007 году, но компания Malin Space Science Systems внесла в него свои собственные ресурсы. [75] После приземления он мог делать снимки поверхности с разрешением 1,5 мм (0,059 дюйма) на пиксель. [76] Первые из этих фотографий после приземления были сделаны 27 августа 2012 г. (20 сол). [77]
- Инженерные камеры: имеется 12 дополнительных камер, поддерживающих мобильность:
- Камеры предотвращения опасностей (Hazcams): марсоход имеет пару черно-белых навигационных камер ( Hazcams ), расположенных на каждом из четырех его углов. [78] Они обеспечивают крупный план потенциальных препятствий, которые могут оказаться под колесами.
- Навигационные камеры (Navcams). Ровер использует две пары черно-белых навигационных камер, установленных на мачте, для поддержки наземной навигации. [78] Они обеспечивают обзор местности впереди на большом расстоянии.
История [ править ]

Марсианская научная лаборатория была рекомендована Комитетом по десятилетним исследованиям Национального исследовательского совета США в качестве первоочередной миссии на Марс для среднего класса в 2003 году. [79] НАСА запросило предложения по научным инструментам для марсохода в апреле 2004 года. [80] и восемь предложений были отобраны 14 декабря того же года. [80] Испытания и проектирование компонентов также начались в конце 2004 года, включая Aerojet разработку компанией монотопливного двигателя с возможностью дросселирования от 15 до 100 процентов тяги при фиксированном давлении топлива на входе. [80]
, задержки и запуск средств Перерасход
К ноябрю 2008 года большая часть разработки аппаратного и программного обеспечения была завершена, и тестирование продолжалось. [81] На данный момент перерасход средств составил около 400 миллионов долларов. В попытках уложиться в дату запуска были удалены несколько инструментов и тайник для образцов, а другие инструменты и камеры были упрощены, чтобы упростить тестирование и интеграцию марсохода. [82] [83] В следующем месяце НАСА отложило запуск до конца 2011 года из-за нехватки времени для испытаний. [84] [85] [86] В конечном итоге затраты на разработку марсохода достигли 2,47 миллиарда долларов. запуск. По состоянию на 2012 год проект перевыполнен на 84 процента. [87]
MSL был запущен на ракете Atlas V с мыса Канаверал 26 ноября 2011 года. [88] 11 января 2012 года космический корабль успешно усовершенствовал свою траекторию, выполнив трехчасовую серию запусков двигателей, что продлило время приземления марсохода примерно на 14 часов. Когда MSL был запущен, директором программы был Дуг Маккуистион из Отдела планетарных наук НАСА. [89]
«Кьюриосити» успешно приземлился в кратере Гейла в 05:17:57,3 UTC 6 августа 2012 г. [3] [9] [10] [11] и передал изображения Hazcam, подтверждающие ориентацию. [11] Из-за расстояния Марс-Земля в момент приземления и ограниченной скорости радиосигналов приземление не было зарегистрировано на Земле еще 14 минут. [11] Марсианский разведывательный орбитальный аппарат прислал фотографию Curiosity, спускающегося под парашютом, сделанную камерой HiRISE во время процедуры приземления.
Шесть старших членов команды Curiosity представили пресс-конференцию через несколько часов после приземления. Это были: Джон Грансфельд , заместитель администратора НАСА; Чарльз Элачи , директор JPL; Питер Тайзингер , руководитель проекта MSL; Ричард Кук, заместитель руководителя проекта MSL; Адам Стельцнер , руководитель MSL по входу, спуску и приземлению (EDL); и Джон Гротцингер , научный сотрудник проекта MSL. [90]
Именование [ править ]
В период с 23 по 29 марта 2009 г. широкая общественность оценила девять названий марсоходов-финалистов («Приключение», «Амелия», «Путешествие», «Восприятие», «Погоня», «Восход», «Видение», «Чудо» и «Любопытство»). [91] посредством общественного опроса на сайте НАСА. [92] 27 мая 2009 года было объявлено, что победителем станет Curiosity . Имя было предложено на конкурсе эссе Кларой Ма, шестиклассницей из Канзаса. [92] [93] [94]
Любопытство — это страсть, которая движет нами в повседневной жизни. Мы стали исследователями и учеными с нашей потребностью задавать вопросы и удивляться.
— Клара Ма, конкурс НАСА/Лаборатории реактивного движения «Назови марсоход»
Выбор места для посадки [ править ]
Было оценено более 60 посадочных площадок, и к июлю 2011 года был выбран кратер Гейла. Основная цель при выборе места посадки состояла в том, чтобы определить конкретную геологическую среду или набор сред, которые будут поддерживать микробную жизнь. Планировщики искали место, которое могло бы способствовать достижению самых разных возможных научных целей. Они предпочли место посадки, имеющее как морфологические, так и минералогические свидетельства существования прошлой воды. участку со спектрами, указывающими на наличие нескольких гидратированных минералов Кроме того, предпочтение отдавалось ; Глинистые минералы и сульфатные соли представляют собой богатое месторождение. Гематит , другие оксиды железа , сульфатные минералы, силикатные минералы , кремнезем и, возможно, хлоридные минералы были предложены в качестве возможных субстратов для сохранения ископаемых . Действительно, известно, что все они способствуют сохранению ископаемых морфологий и молекул на Земле. [97] Сложная местность предпочтительна для поиска признаков пригодных для жизни условий, но марсоход должен иметь возможность безопасно добраться до места и проехать по нему. [98]
Инженерные ограничения требовали, чтобы место посадки было расположено менее чем в 45° от марсианского экватора и менее чем на 1 км выше базовой точки отсчета . [99] На первом семинаре MSL по местам посадки были определены 33 потенциальных места посадки. [100] К концу второго семинара в конце 2007 года список сократился до шести; [101] [102] в ноябре 2008 года руководители проекта на третьем семинаре сократили список до этих четырех посадочных площадок: [103] [104] [105] [106]
| Имя | Расположение | Высота | Примечания |
|---|---|---|---|
| кратера Эберсвальде Дельта | 23 ° 52'ю.ш., 326 ° 44' в.д. / 23,86 ° ю.ш., 326,73 ° в.д. | −1450 м (−4760 футов) | Дельта древней реки. [107] |
| кратера Холдена Веер | 26 ° 22' ю.ш., 325 ° 06' в.д. / 26,37 ° ю.ш., 325,10 ° в.д. | −1940 м (−6360 футов) | Дно высохшего озера. [108] |
| Кратер Гейла | 4 ° 29'ю.ш., 137 ° 25' в.д. / 4,49 ° ю.ш., 137,42 ° в.д. | −4451 м (−14603 футов) | Гора высотой 5 км (3,1 мили). слоистого материала вблизи центра. [109] Выбрано. [95] |
| Мартовская долина, участок 2 | 24 ° 01' с.ш., 341 ° 02' в.д. / 24,01 ° с.ш., 341,03 ° в.д. | −2246 м (−7369 футов) | Канал, прорезанный катастрофическими наводнениями. [110] |
Четвертый семинар по посадочной площадке состоялся в конце сентября 2010 года. [111] и пятый и последний семинар 16–18 мая 2011 г. [112] 22 июля 2011 года было объявлено, что кратер Гейла был выбран местом посадки миссии Марсианской научной лаборатории.
Запустить [ править ]

Ракета-носитель [ править ]
Ракета -носитель Atlas V способна вывести на геостационарную переходную орбиту массу до 8290 кг (18280 фунтов) . [113] Атлас V также использовался для запуска марсианского разведывательного орбитального аппарата и зонда «Новые горизонты» . [5] [114]
Первая и вторая ступени вместе с твердотопливными двигателями были сложены 9 октября 2011 года возле стартовой площадки. [115] Обтекатель с МСЛ был доставлен на стартовую площадку 3 ноября 2011 года. [116]
Запуск мероприятия [ править ]
MSL был запущен с космодрома 41 станции ВВС на мысе Канаверал 26 ноября 2011 года в 15:02 по всемирному координированному времени с помощью корабля Atlas V 541 , предоставленного United Launch Alliance . [117] Эта двухступенчатая ракета (CCB) длиной 3,8 м (12 футов), включает в себя ракету -носитель с общим ядром оснащенную одним двигателем РД-180 , четыре твердотопливных ракетных ускорителя (SRB) и одну «Кентавр» вторую ступень диаметром 5 м (16 футов). с обтекателем полезной нагрузки . [118] Программа НАСА по пусковым услугам координировала запуск посредством контракта НАСА по пусковым услугам (NLS) I. [119]
Круиз [ править ]
Земля · Марс · Марсианская научная лаборатория
Круизный этап [ править ]
Крейсерский этап провёл космический корабль MSL через космическую пустоту и доставил его на Марс. Межпланетное путешествие преодолело расстояние в 352 миллиона миль за 253 дня. [120] Крейсерская ступень имеет собственную миниатюрную двигательную установку, состоящую из восьми двигателей, работающих на гидразиновом топливе, в двух титановых баках. [121] Он также имеет собственную систему электроснабжения , состоящую из солнечной батареи и батареи для обеспечения непрерывного электропитания. Достигнув Марса, космический корабль перестал вращаться, и перерезчик кабеля отделил маршевую ступень от аэрооболочки. [121] Затем круизный этап был переведен на отдельную траекторию в атмосферу. [122] [123] В декабре 2012 года поле обломков с этапа круиза было обнаружено марсианским разведывательным орбитальным аппаратом . Поскольку первоначальный размер, скорость, плотность и угол падения аппаратуры известны, она предоставит информацию о процессах удара о поверхность Марса и свойствах атмосферы. [124]
Переходная орбита Марса [ править ]
Космический корабль MSL покинул околоземную орбиту и был выведен на гелиоцентрическую переходную орбиту Марса 26 ноября 2011 года, вскоре после запуска, разгонным блоком «Кентавр» ракеты-носителя «Атлас V». [118] Перед отделением «Кентавра» космический корабль стабилизировался на скорости 2 об/мин для управления ориентацией во время полета к Марсу на скорости 36 210 км/ч (22 500 миль в час). [125]
Во время крейсерского полета восемь двигателей, расположенных в двух группах, использовались в качестве приводов для управления скоростью вращения и выполнения маневров по коррекции осевой или боковой траектории . [27] Вращаясь вокруг своей центральной оси, он сохранял устойчивое положение. [27] [126] [127] По пути крейсерский этап выполнил четыре маневра коррекции траектории, чтобы скорректировать траекторию космического корабля к месту приземления. [128] Информация передавалась диспетчерам миссии через две антенны Х-диапазона . [121] Ключевой задачей крейсерского этапа был контроль температуры всех систем космического корабля и рассеивание тепла, вырабатываемого источниками энергии, такими как солнечные элементы и двигатели, в космос. В некоторых системах изолирующие одеяла сохраняли температуру чувствительных научных инструментов выше температуры, близкой к абсолютному нулю в космосе. Термостаты контролировали температуру и при необходимости включали или выключали системы отопления и охлаждения. [121]
Вход, спуск и приземление (EDL) [ править ]
Система космического корабля EDL [ править ]
Посадить большую массу на Марс особенно сложно, поскольку атмосфера слишком разрежена, чтобы парашюты и аэроторможение были эффективными. [129] оставаясь при этом достаточно толстым, чтобы создавать проблемы со стабильностью и столкновением при замедлении с помощью тормозных ракет . [129] использовались подушки безопасности Хотя в некоторых предыдущих миссиях для смягчения удара при приземлении , марсоход Curiosity слишком тяжел, чтобы это было возможно. Вместо этого «Кьюриосити» был посажен на поверхность Марса с использованием новой высокоточной системы входа, спуска и посадки (EDL), которая была частью ступени спуска космического корабля MSL. Масса этой системы EDL, включая парашют, небесный кран, топливо и аэродинамический снаряд , составляет 2401 кг (5293 фунта). [130] Новая система EDL разместила Curiosity в пределах посадочного эллипса размером 20 на 7 км (12,4 на 4,3 мили). [96] в отличие от посадочного эллипса 150 на 20 км (93 на 12 миль) систем приземления, используемых марсоходами. [131]
Система входа-спуска-посадки (EDL) отличается от систем, используемых для других миссий, тем, что она не требует интерактивного, составленного на земле плана миссии. На протяжении всего этапа приземления аппарат действует автономно, основываясь на предварительно загруженном программном обеспечении и параметрах. [27] Система EDL была основана на конструкции аэродинамической оболочки и двигательной установке, заимствованной у Viking, для точного входа и мягкой посадки, в отличие от приземлений с подушками безопасности, которые использовались в середине 1990-х годов в миссиях Mars Pathfinder и Mars Exploration Rover . На космическом корабле использовалось несколько систем в точном порядке, при этом последовательность входа, спуска и приземления была разбита на четыре части. [131] [132] - описано ниже, как события космического полета развернулись 6 августа 2012 года.
Мероприятие EDL – 6 августа 2012 г. [ править ]

Несмотря на поздний час, особенно на восточном побережье Соединенных Штатов, где было 1:31 ночи, [9] приземление вызвало значительный общественный интерес. 3,2 миллиона человек наблюдали за приземлением в прямом эфире, причем большинство из них смотрели онлайн, а не по телевидению через телевидение НАСА или кабельные новостные сети, освещающие это событие в прямом эфире. [133] Последнее место приземления марсохода находилось менее чем в 2,4 км (1,5 мили) от цели после путешествия длиной 563 270 400 км (350 000 000 миль). [38] Помимо потокового вещания и традиционного просмотра видео, JPL создала Eyes on the Solar System — трехмерную симуляцию входа, спуска и посадки в реальном времени на основе реальных данных. , Время приземления Curiosity представленное в программном обеспечении, основанное на прогнозах JPL, отличалось от реальности менее чем на 1 секунду. [134]
Фаза EDL космического полета миссии MSL на Марс длилась всего семь минут и разворачивалась автоматически, как заранее запрограммировано инженерами JPL, в точном порядке, при этом последовательность входа, спуска и приземления происходила в четыре отдельные фазы событий: [131] [132]
Управляемый вход [ править ]

При точном управляемом входе использовались возможности бортовых компьютеров, чтобы направиться к заранее определенному месту приземления, что повысило точность приземления на расстоянии от сотен километров до 20 километров (12 миль). Эта возможность помогла устранить некоторые неопределенности, связанные с опасностями приземления, которые могли присутствовать при более крупных посадочных эллипсах. [135] Рулевое управление достигалось за счет комбинированного использования подруливающих устройств и выбрасываемых балансировочных масс. [136] Выбрасываемые балансировочные массы смещают центр масс капсулы, обеспечивая создание вектора подъемной силы во время атмосферной фазы. Навигационный компьютер объединил измерения, чтобы оценить положение и положение капсулы, которая генерировала автоматические команды крутящего момента. Это была первая планетарная миссия, в которой использовались методы точной посадки.
Ровер был сложен в аэрооболочку , которая защищала его во время путешествия в космосе и при входе в атмосферу Марса. За десять минут до входа в атмосферу аэрооболочка отделилась от круизной ступени, которая обеспечивала электроэнергию, связь и движение во время длительного полета на Марс. Через минуту после отделения от маршевой ступени двигатели аэрооболочки сработали, чтобы компенсировать вращение космического корабля на 2 оборота в минуту, и достигли ориентации с тепловым экраном, обращенным к Марсу, готовясь к входу в атмосферу . [137] Тепловой экран изготовлен из углеродного аблятора, пропитанного фенольной смолой (PICA). Тепловой экран диаметром 4,5 м (15 футов) — самый большой тепловой экран, когда-либо летавший в космос. [138] уменьшила скорость космического корабля за счет абляции о марсианской атмосфере со скорости границы с атмосферой примерно 5,8 км/с (3,6 миль/с) до примерно 470 м/с (1500 футов/с), при этом развертывание парашюта было возможно примерно четыре минуты спустя. Через одну минуту и 15 секунд после входа тепловой щит испытал пиковую температуру до 2090 ° C (3790 ° F), поскольку атмосферное давление преобразовывало кинетическую энергию в тепло. Через десять секунд после пикового нагрева это замедление достигло максимума в 15 g . [137]
Большая часть снижения ошибки точности приземления была достигнута за счет алгоритма наведения при входе, созданного на основе алгоритма, используемого для наведения командных модулей Аполлона, возвращающихся на Землю в программе Аполлон . [137] В этом наведении используется подъемная сила, испытываемая аэроснарядом, чтобы «вылететь» из любой обнаруженной ошибки в дальности и тем самым достичь намеченной точки приземления. Чтобы аэрооболочка имела подъемную силу, ее центр масс смещен относительно осевой линии, что приводит к отклонению от центра угла дифферента при полете в атмосфере. Это было достигнуто путем выброса балластных масс, состоящих из двух вольфрамовых гирь по 75 кг (165 фунтов), за несколько минут до входа в атмосферу. [137] Вектор подъемной силы контролировался четырьмя комплектами двух двигателей системы управления реакцией (RCS), которые создавали тягу примерно 500 Н (110 фунтов-силы) на пару. Эта способность изменять направление подъемной силы позволяла космическому кораблю реагировать на окружающую среду и направляться к зоне приземления. Перед раскрытием парашюта входная машина выбросила дополнительную балластную массу, состоящую из шести вольфрамовых грузов по 25 кг (55 фунтов), так что смещение центра тяжести было устранено. [137]
Спуск с парашютом [ править ]

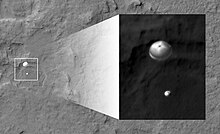
Когда фаза входа была завершена и капсула замедлилась примерно до 470 м/с (1500 футов/с) на высоте около 10 км (6,2 мили), сверхзвуковой парашют раскрылся. [139] как это было сделано предыдущими посадочными модулями, такими как «Викинг» , «Марс-следопыт» и марсоходы для исследования Марса. Парашют имеет 80 строп, длину более 50 м (160 футов) и диаметр около 16 м (52 фута). [140] Парашют, способный раскрываться со скоростью 2,2 Маха, может генерировать силу сопротивления до 289 кН (65 000 фунтов силы) в марсианской атмосфере. [140] После раскрытия парашюта теплозащитный экран отделился и отпал. Камера под марсоходом снимала около 5 кадров в секунду (с разрешением 1600×1200 пикселей) на высоте менее 3,7 км (2,3 мили) в течение примерно 2 минут, пока датчики марсохода не подтвердили успешную посадку. [141] Команда Mars Reconnaissance Orbiter смогла получить изображение MSL, спускающегося под парашютом. [142]
Механизированный спуск [ править ]

После торможения на парашюте, на высоте около 1,8 км (1,1 мили), все еще двигаясь со скоростью около 100 м / с (220 миль в час), марсоход и спускаемая ступень выпали из аэрооболочки. [139] Ступень спуска представляет собой платформу над марсоходом с восемью монотопливными гидразиновыми ракетными двигателями регулируемой тяги на рычагах, простирающихся вокруг этой платформы для замедления спуска. Каждый ракетный двигатель, называемый Mars Lander Engine (MLE), [126] создает тягу от 400 до 3100 Н (от 90 до 697 фунтов силы) и заимствованы из тех, что использовались на посадочных модулях «Викинг». [143] Радарный высотомер измерял высоту и скорость, передавая данные в бортовой компьютер марсохода. Тем временем марсоход трансформировался из походной конфигурации полета в посадочную конфигурацию, опускаясь под ступень спуска с помощью системы «небесного крана».
Небесный кран [ править ]


По нескольким причинам для MSL была выбрана другая система посадки по сравнению с предыдущими марсианскими спускаемыми аппаратами и марсоходами. Curiosity считался слишком тяжелым для использования системы посадки с подушками безопасности, которая используется на марсоходах Mars Pathfinder и Mars Exploration Rover . Заход посадочного модуля на ноги вызвал бы несколько проблем при проектировании. [137] При посадке двигатели должны были располагаться достаточно высоко над землей, чтобы не образовывалось облако пыли, которое могло бы повредить инструменты марсохода. Для этого потребовались бы длинные посадочные опоры, которые должны были бы иметь значительную ширину, чтобы удерживать центр тяжести низко. Посадочному аппарату на ногах также потребовались бы пандусы, чтобы марсоход мог спуститься на поверхность, что создало бы дополнительный риск для миссии, поскольку камни или наклон не позволили бы Curiosity успешно оторваться от посадочного модуля. Столкнувшись с этими проблемами, инженеры MSL предложили новое альтернативное решение: небесный кран. [137] Система небесного крана опустила марсоход на высоту 7,6 м (25 футов). [137] привязать к мягкой посадке (колеса вниз) на поверхность Марса. [139] [144] [145] Эта система состоит из уздечки, опускающей марсоход на трех нейлоновых ремнях, и электрического кабеля, передающего информацию и энергию между спускаемой ступенью и марсоходом. Когда опорные кабели и кабели передачи данных размотались, шесть моторизованных колес марсохода встали на свои места. Примерно на высоте 7,5 м (25 футов) ниже ступени спуска система небесного крана замедлилась и остановилась, и марсоход приземлился. После того, как марсоход приземлился, он подождал две секунды, чтобы подтвердить, что он находится на твердой земле, определив вес на колесах, и выпустил несколько пиротехнических устройств (небольших взрывных устройств), активируя кусачки на уздечке и пуповинах, чтобы освободиться от стадии спуска. . Затем спускаемая ступень улетела и совершила аварийную посадку на расстоянии 650 м (2100 футов). [146] Концепция небесного крана никогда раньше не использовалась в миссиях. [147]
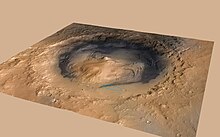
Посадочная площадка [ править ]
Кратер Гейла — место посадки MSL. [95] [148] [149] Внутри кратера Гейла находится гора под названием Эолис Монс («Гора Шарп»). [17] [18] [150] из слоистых пород, возвышающихся примерно на 5,5 км (18 000 футов) над дном кратера, который Curiosity будет исследовать . Место приземления — гладкая местность в квадрате 51 «Йеллоунайф». [151] [152] [153] [154] Эолиды Пала внутри кратера перед горой. Целевое место приземления представляло собой эллиптическую площадку размером 20 на 7 км (12,4 на 4,3 мили). [96] Диаметр кратера Гейла составляет 154 км (96 миль).
Место приземления марсохода находилось менее чем в 2,4 км (1,5 мили) от центра запланированного посадочного эллипса после путешествия длиной 563 000 000 км (350 000 000 миль). [155] НАСА назвало место посадки марсохода «Посадка Брэдбери» 16 сол 22 августа 2012 года. [156] от 20 000 до 40 000 термостойких бактериальных спор находилось По данным НАСА, при запуске Curiosity , и в 1000 раз больше этого числа, возможно, не было подсчитано. [157]
СМИ [ править ]
Видео [ править ]
Изображения [ править ]

 Выброшенный тепловой щит при спуске марсохода на поверхность Марса (6 августа 2012 г., 05:17 UTC)
Выброшенный тепловой щит при спуске марсохода на поверхность Марса (6 августа 2012 г., 05:17 UTC)


 Первое изображение Curiosity после приземления: видно колесо марсохода (6 августа 2012 г.).
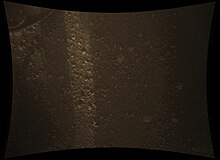
Первое изображение Curiosity после приземления: видно колесо марсохода (6 августа 2012 г.). аппаратом Curiosity (6 августа 2012 г.) Первое цветное изображение марсианского ландшафта, сделанное
аппаратом Curiosity (6 августа 2012 г.) Первое цветное изображение марсианского ландшафта, сделанное![Первый тест-драйв Curiosity (Брэдбери-Лендинг) (22 августа 2012 г.)[156]](//upload.wikimedia.org/wikipedia/commons/thumb/6/63/PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg/140px-PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg) Curiosity Первый тест-драйв ( Bradbury Landing ) (22 августа 2012 г.) [156]
Curiosity Первый тест-драйв ( Bradbury Landing ) (22 августа 2012 г.) [156]







![Первый тест-драйв Curiosity (Брэдбери-Лендинг) (22 августа 2012 г.)[156]](http://upload.wikimedia.org/wikipedia/commons/thumb/6/63/PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg/140px-PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg)





См. также [ править ]
- Четырехугольник Эолиды - одна из серии из 30 четырехугольных карт Марса.
- Астробиология - наука, изучающая жизнь во Вселенной.
- Камера, ручной объектив и зонд для микроскопа
- ЭкзоМарс - программа астробиологии
- Исследование Марса
- InSight - марсианский спускаемый аппарат, прибыл в ноябре 2018 г.
- Список миссий на Марс
- Список камней на Марсе - Алфавитный список названных камней и метеоритов, найденных на Марсе.
- Марс 2020 – астробиологическая миссия марсохода НАСА
- MAVEN - Марсианский орбитальный аппарат НАСА
- Роботизированный космический корабль - космический корабль без людей на борту
- Научная информация от миссии Mars Exploration Rover
- История освоения космоса США на марках США - Обзор предприятий за пределами Земли, изображенный для удобства американской почтовой пересылки.
Ссылки [ править ]
- ↑ Перейти обратно: Перейти обратно: а б «Пресс-кит для приземления Марсианской научной лаборатории» (PDF) . НАСА . Июль 2012. с. 6. Архивировано из оригинала (PDF) 5 августа 2012 года . Проверено 5 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б Бойтель, Аллард (19 ноября 2011 г.). «Запуск марсианской научной лаборатории НАСА перенесен на 26 ноября» . НАСА . Проверено 21 ноября 2011 г.
- ↑ Перейти обратно: Перейти обратно: а б с Грейсиус, Тони (20 января 2015 г.). «Марсианская научная лаборатория – Любопытство» .
- ^ Гай Вебстер. «Дата выбора геометрических приводов для запуска на Марс в 2011 году» . НАСА/Лаборатория реактивного движения-Калифорнийский технологический институт. Архивировано из оригинала 18 апреля 2021 года . Проверено 22 сентября 2011 г.
- ↑ Перейти обратно: Перейти обратно: а б Мартин, Пол К. «Управление НАСА проектом марсианской научной лаборатории (IG-11-019)» (PDF) . Управление генерального инспектора НАСА. Архивировано из оригинала (PDF) 3 декабря 2011 года . Проверено 8 июня 2011 г.
- ^ «Видео с марсохода, смотрящего на Марс во время приземления» . MSNBC . 6 августа 2012 года . Проверено 7 октября 2012 г.
- ^ Янг, Моника (7 августа 2012 г.). «Смотри «Кьюриосити спускается на Марс» . Небо и телескоп . Проверено 7 октября 2012 г.
- ^ «Где любопытство?» . mars.nasa.gov . НАСА . Проверено 30 мая 2023 г.
 В данную статью включен текст из этого источника, находящегося в свободном доступе .
В данную статью включен текст из этого источника, находящегося в свободном доступе . - ↑ Перейти обратно: Перейти обратно: а б с Уолл, Майк (6 августа 2012 г.). «Приземление! Огромный марсоход НАСА приземляется на Марс» . Space.com . Проверено 14 декабря 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б «Обновление MSL Sol 3» . Телевидение НАСА. 8 августа 2012 года. Архивировано из оригинала 12 декабря 2021 года . Проверено 9 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б с д «Обновления миссии MSL» . Spaceflight101.com . 6 августа 2012 г. Архивировано из оригинала 25 августа 2012 г.
- ^ «Обзор» . Лаборатория реактивного движения . НАСА . Проверено 27 ноября 2011 г.
- ^ «Исследование Марса: радиоизотопная энергия и нагрев для исследования поверхности Марса» (PDF) . НАСА/Лаборатория реактивного движения. 18 апреля 2006 г. Архивировано из оригинала (PDF) 12 октября 2012 г. . Проверено 7 сентября 2009 г.
- ^ «Команда марсоходов НАСА стремится приземлиться ближе к главному научному комплексу» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 15 июня 2012 года . Проверено 15 мая 2012 г.
- ^ Мартин-Мур, Томас Дж.; Круизинга, Герхард Л.; Беркхарт, П. Дэниел; Вонг, Мау К.; Абилейра, Фернандо (2012). Результаты навигации Марсианской научной лаборатории (PDF) . 23-й Международный симпозиум по динамике космических полетов. Пасадена, Калифорния. 29 октября – 2 ноября 2012 г. с. 17. Запись маяка .
- ^ Амос, Джонатан (11 августа 2012 г.). «Марсоход Curiosity совершил почти идеальную посадку» . Би-би-си . Проверено 13 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б Эгл, округ Колумбия (28 марта 2012 г.). « Гора Шарп на Марсе связывает прошлое и будущее геологии» . НАСА . Архивировано из оригинала 6 марта 2017 года . Проверено 31 марта 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б Штатные авторы (29 марта 2012 г.). «Новый марсоход НАСА исследует возвышающуюся гору Шарп » . Space.com . Проверено 30 марта 2012 г.
- ^ «Марсианская научная лаборатория: Миссия» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 5 марта 2006 года . Проверено 12 марта 2010 г.
- ^ Леоне, Дэн (8 июля 2011 г.). «Научная лаборатория Марса нуждается в дополнительных 44 миллионах долларов для полетов, показал аудит НАСА» . Космические новости Интернэшнл . Проверено 26 ноября 2011 г.
- ^ Леоне, Дэн (10 августа 2012 г.). «Показания MSL могут повысить безопасность полетов людей на Марс» . Космические новости . Проверено 18 июня 2014 г.
- ^ Уотсон, Трейси (14 апреля 2008 г.). «Проблемы параллельны амбициям в марсианском проекте НАСА» . США сегодня . Проверено 27 мая 2009 г.
- ^ Манн, Адам (25 июня 2012 г.). «Что обнаружит следующий марсоход НАСА» . Проводной . Проводной журнал . Проверено 26 июня 2012 г.
- ^ НАСА, Лаборатория реактивного движения. «Цели — Марсианская научная лаборатория» .
- ^ «НАСА – Любопытство, дублер (2012)» . Архивировано из оригинала 1 августа 2012 года . Проверено 28 февраля 2012 г.
- ^ Гротцингер, Джон П. (24 января 2014 г.). «Обитаемость, тафономия и поиск органического углерода на Марсе» . Наука . 343 (6169): 386–87. Бибкод : 2014Sci...343..386G . дои : 10.1126/science.1249944 . ПМИД 24458635 .
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я Маковский, Андре; Илотт, Питер; Тейлор, Джим (ноябрь 2009 г.). Проектирование телекоммуникационной системы научной лаборатории Марса. Статья 14. Серия обзоров конструкции и производительности DESCANSO (PDF) (отчет). Пасадена, Калифорния: Лаборатория реактивного движения – НАСА.
- ^ Райт, Майкл (1 мая 2007 г.). «Обзор научного проектирования системы (SDR)» (PDF) . НАСА/Лаборатория реактивного движения. Архивировано из оригинала (PDF) 1 октября 2009 г. Проверено 9 сентября 2009 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и «Марсианская научная лаборатория: Миссия: Ровер: Мозги» . НАСА/Лаборатория реактивного движения . Проверено 27 марта 2009 г.
- ^ Баджрачарья, Макс; Марк В. Маймон; Дэниел Хелмик (декабрь 2008 г.). «Автономность марсоходов: прошлое, настоящее и будущее». Компьютер . 41 (12): 45. дои : 10.1109/MC.2008.9 . ISSN 0018-9162 .
- ^ «Компьютеры BAE Systems для управления обработкой данных и командованием предстоящих спутниковых миссий» (пресс-релиз). БАЕ Системс. 17 июня 2008 года. Архивировано из оригинала 6 сентября 2008 года . Проверено 17 ноября 2008 г.
- ^ «E&ISNow — СМИ ближе знакомятся с Манассасом» (PDF) . БАЕ Системс. 1 августа 2008 г. Архивировано из оригинала (PDF) 18 сентября 2008 г. . Проверено 17 ноября 2008 г.
- ^ «Узнай обо мне: марсоход Curiosity» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 7 августа 2012 года . Проверено 8 августа 2012 г.
- ^ «Радиационно-стойкий микропроцессор PowerPC RAD750» (PDF) . БАЕ Системс. 1 июля 2008 года . Проверено 7 сентября 2009 г.
- ^ «Космические компьютеры RAD6000» (PDF) . БАЕ Системс. 23 июня 2008 г. Архивировано из оригинала (PDF) 4 октября 2009 г. . Проверено 7 сентября 2009 г.
- ^ «Марсоход НАСА Curiosity устанавливает смарт-карты для вождения» . Архивировано из оригинала 9 февраля 2022 года . Проверено 10 августа 2012 г.
- ^ «VxWorks компании Wind River приводит в действие марсоход Curiosity для научной лаборатории Марса» . Архивировано из оригинала 20 сентября 2012 года . Проверено 6 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б «Впечатляющий» «Кьюриосити» приземлился всего в 1,5 милях от нас, сообщает НАСА» . Проверено 10 августа 2012 г.
- ^ «Марсианская научная лаборатория, связь с Землей» . Лаборатория реактивного движения.
- ^ «Передача данных Curiosity с Землей» . НАСА . Проверено 7 августа 2012 г.
- ^ Каин, Фрейзер (10 августа 2012 г.). «Расстояние от Земли до Марса» . Вселенная сегодня . Проверено 17 августа 2012 г.
- ^ Персонал. «Расстояние Марс-Земля в световых минутах» . Вольфрам Альфа . Проверено 6 августа 2012 г.
- ^ Уильям Харвуд (31 июля 2012 г.). «Спутники-ретрансляторы обеспечивают место у ринга для посадки марсохода» . Космический полет сейчас . Проверено 1 июля 2013 г.
- ^ «Следующий марсоход получит комплект новых колес» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 5 июля 2014 года . Проверено 1 июля 2010 г.
- ^ «Смотрите, как строится следующий марсоход НАСА, в прямом эфире с камеры Curiosity » . НАСА . 13 сентября 2011. Архивировано из оригинала 26 ноября 2011 года . Проверено 16 августа 2012 г.
- ^ «Новый марсоход с азбукой Морзе» . Американская лига радиорелейной связи.
- ^ Амос, Джонатан (3 августа 2012 г.). «Кратер Гейла: геологическая «кондитерская» ждет марсоход» . Новости Би-би-си . Проверено 6 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б с «Научный уголок MSL: анализ проб на Марсе (SAM)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 9 сентября 2009 г.
- ↑ Перейти обратно: Перейти обратно: а б «Главная страница — Лаборатория планетарных сред — 699» . Архивировано из оригинала 22 февраля 2007 года.
- ↑ Перейти обратно: Перейти обратно: а б Исследовательский центр Эймса НАСА, Дэвид Блейк (2011). «Научный уголок MSL – химия и минералогия (CheMin)» . Архивировано из оригинала 20 марта 2009 года . Проверено 24 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б с Научный офис проекта MSL (14 декабря 2010 г.). «Программа ученых-участников Марсианской научной лаборатории - информационный пакет предложений» (PDF) . Лаборатория реактивного движения — НАСА . Вашингтонский университет . Проверено 24 августа 2012 г.
- ^ Сарразин П.; Блейк Д.; Фельдман С.; Чипера С.; Ваниман Д.; Биш Д. «Полевое развертывание портативного XRD/XRF-инструмента на аналоговой поверхности Марса» (PDF) . Достижения в рентгеновском анализе . 48 . Архивировано из оригинала (PDF) 12 мая 2013 года . Проверено 24 августа 2012 г.
Международный центр дифракционных данных, 2005 г.
- ^ «Комплект инструментов для анализа проб на Марсе (SAM)» . НАСА. Октябрь 2008. Архивировано из оригинала 22 февраля 2007 года . Проверено 9 октября 2008 г.
- ^ Тененбаум, Д. (9 июня 2008 г.). «Понимание марсианского метана» . Журнал астробиологии . Архивировано из оригинала 31 мая 2012 года . Проверено 8 октября 2008 г.
{{cite web}}: CS1 maint: неподходящий URL ( ссылка ) - ^ Тарситано, КГ; Вебстер, ЧР (2007). «Мультилазерная ячейка Эрриотта для планетарных перестраиваемых лазерных спектрометров». Прикладная оптика . 46 (28): 6923–6935. Бибкод : 2007ApOpt..46.6923T . дои : 10.1364/AO.46.006923 . ПМИД 17906720 . S2CID 45886335 .
- ^ Махаффи, Пол Р.; и др. (2012). «Анализ образцов в Mars Investigation и Instrument Suite» . Обзоры космической науки . 170 (1–4): 401–478. Бибкод : 2012ССРв..170..401М . дои : 10.1007/s11214-012-9879-z . hdl : 2060/20120002542 .
- ↑ Перейти обратно: Перейти обратно: а б Керр, Ричард (31 мая 2013 г.). «Радиация сделает путешествие астронавтов на Марс еще более рискованным». Наука . 340 (6136): 1031. Бибкод : 2013Sci...340.1031K . дои : 10.1126/science.340.6136.1031 . ПМИД 23723213 .
- ↑ Перейти обратно: Перейти обратно: а б Зейтлин, К.; и др. (31 мая 2013 г.). «Измерения излучения энергетических частиц на пути к Марсу в Марсианской научной лаборатории» . Наука . 340 (6136): 1080–1084. Бибкод : 2013Sci...340.1080Z . дои : 10.1126/science.1235989 . ПМИД 23723233 . S2CID 604569 .
- ↑ Перейти обратно: Перейти обратно: а б Чанг, Кеннет (30 мая 2013 г.). «Данные о радиационном риске для путешественников на Марс» . Нью-Йорк Таймс . Проверено 31 мая 2013 г.
- ^ mars.nasa.gov. «Уровни радиации на пути к Марсу — Марсианская научная лаборатория» .
- ^ Литвак, М.Л.; Митрофанов И.Г.; Бармаков Ю.Н.; Бехар, А.; Битулев А.; Бобровницкий Ю.; Боголюбов Е.П.; Бойнтон, Западная Вирджиния; и др. (2008). «Эксперимент по динамическому альбедо нейтронов (DAN) для Марсианской научной лаборатории НАСА в 2009 году». Астробиология . 8 (3): 605–12. Бибкод : 2008AsBio...8..605L . дои : 10.1089/ast.2007.0157 . ПМИД 18598140 .
- ^ «Научный уголок MSL: динамическое альбедо нейтронов (ДАН)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 9 сентября 2009 г.
- ↑ Перейти обратно: Перейти обратно: а б «Планы путешествия «Кьюриосити» на Марс предварительно составлены» . Новости CBS .
- ^ «НАСА — NSSDCA — Космический корабль — Подробности» .
- ↑ Перейти обратно: Перейти обратно: а б «Роверная станция мониторинга окружающей среды для миссии MSL» (PDF) . 4-й Международный семинар «Атмосфера Марса: моделирование и наблюдения» . Университет Пьера и Марии Кюри. Февраль 2011 года . Проверено 6 августа 2012 г.
- ^ Администратор НАСА (6 июня 2013 г.). «Семнадцать камер о любопытстве» .
- ^ Малин, MC; Белл, Дж. Ф.; Кэмерон, Дж.; Дитрих, МЫ; Эджетт, Канзас; Халлет, Б.; Херкенхофф, Кентукки; Леммон, Монтана; и др. (2005). «Мачтовые камеры и устройство визуализации спуска с Марса (MARDI) для Марсианской научной лаборатории 2009 г.» (PDF) . 36-я ежегодная конференция по наукам о Луне и планетах . 36 : 1214. Бибкод : 2005LPI....36.1214M .
- ^ «Мачтовая камера (Mastcam)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 18 февраля 2009 года . Проверено 18 марта 2009 г.
- ^ «Mars Hand Lens Imager (MAHLI)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 23 марта 2009 г.
- ^ «Марсианский десантный имиджер (МАРДИ)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 3 апреля 2009 г.
- ^ «Марсианская научная лаборатория (MSL): Мачтовая камера (Mastcam): Описание прибора» . Малинские космические научные системы . Проверено 19 апреля 2009 г.
- ^ «Объявление о приборном обеспечении Марсианской научной лаборатории от Алана Стерна и Джима Грина, штаб-квартира НАСА» . SpaceRef Интерактив . Архивировано из оригинала 16 сентября 2012 года.
- ^ Эмили, Лакдавалла (27 марта 2018 г.). Конструкция и проектирование Curiosity: как марсоход выполняет свою работу . Чам, Швейцария. ISBN 9783319681467 . OCLC 1030303276 .
{{cite book}}: CS1 maint: отсутствует местоположение издателя ( ссылка ) - ^ «ChemCam - ChemCam - Как работает ChemCam?» .
- ^ [НУЛЕВОЙ]. «Научный уголок MSL: имидж-сканер спуска с Марса (MARDI)» . Архивировано из оригинала 20 марта 2009 года.
- ^ «MSL Картинка дня: Дни Т-27: приборы: МАРДИ» . Архивировано из оригинала 19 января 2013 года.
- ^ НАСА, Лаборатория реактивного движения. «Необработанные изображения — Марсианская научная лаборатория» .
- ↑ Перейти обратно: Перейти обратно: а б Манн, Адам (7 августа 2012 г.). «Путеводитель для фотолюбителей по 17 камерам марсохода Curiosity» . Проводная наука . Проверено 15 августа 2012 г.
- ^ Совет национальных исследований (11 июля 2002 г.). Новые рубежи Солнечной системы: стратегия комплексных исследований . дои : 10.17226/10432 . ISBN 978-0-309-08495-6 .
- ↑ Перейти обратно: Перейти обратно: а б с Статопулос, Вик (октябрь 2011 г.). «Марсианская научная лаборатория» . Аэрокосмический справочник . Проверено 4 февраля 2012 г.
- ^ Технический статус и статус перепланировки MSL . Ричард Кук. (9 января 2009 г.)
- ^ Крэддок, Боб (1 ноября 2007 г.). «Предложение: перестаньте совершенствоваться. Почему каждая миссия на Марс должна быть лучше предыдущей?» . Воздух и космос/Смитсоновский институт . Проверено 10 ноября 2007 г.
- ^ Нэнси Аткинсон (10 октября 2008 г.). «Марсианская научная лаборатория: пока еще жива» . Вселенная сегодня . Проверено 1 июля 2013 г.
- ^ «Следующая миссия НАСА на Марс перенесена на 2011 год» . НАСА/Лаборатория реактивного движения. 4 декабря 2008 года. Архивировано из оригинала 11 июня 2011 года . Проверено 4 декабря 2008 г.
- ^ «Марсианская научная лаборатория: бюджетные причины задержки» . Космический обзор . 2 марта 2009 года . Проверено 26 января 2010 г.
- ^ Браун, Адриан (2 марта 2009 г.). «Марсианская научная лаборатория: бюджетные причины задержки» . Космический обзор . Проверено 4 августа 2012 г.
НАСА впервые представило надежную оценку стоимости миссии MSL при «переходе между фазой A и фазой B» после предварительного анализа проекта (PDR), в ходе которого были одобрены инструменты, проектирование и проектирование всей миссии. Это было в августе 2006 года, и одобренная Конгрессом цифра составляла 1,63 миллиарда долларов. ... Благодаря этому запросу бюджет MSL достиг 1,9 миллиарда долларов. ... Штаб-квартира НАСА попросила Лабораторию реактивного движения подготовить оценку затрат на завершение строительства MSL к следующей возможности запуска (в октябре 2011 года). Эта цифра составила около 300 миллионов долларов, и по оценкам штаб-квартиры НАСА, это составит не менее 400 миллионов долларов (при условии, что потребуются резервы) для запуска MSL и его эксплуатации на поверхности Марса с 2012 по 2014 год.
- ^ «GAO критикует JWST и перерасход средств MSL» . Проверено 30 декабря 2018 г.
- ^ НАСА, Лаборатория реактивного движения. «Конфигурация круиза — Марсианская научная лаборатория» .
- ^ «Дуг Маккуистион» . НАСА. Архивировано из оригинала 21 января 2012 года . Проверено 16 декабря 2011 г.
- ^ Телевидение НАСА (6 августа 2012 г.). «Ровер Curiosity начинает миссию на Марс» . Ютуб. Архивировано из оригинала 12 декабря 2021 года . Проверено 14 августа 2012 г.
- ^ Финалисты (в алфавитном порядке).
- ↑ Перейти обратно: Перейти обратно: а б «Назовите следующий марсоход НАСА» . НАСА/Лаборатория реактивного движения. 27 мая 2009. Архивировано из оригинала 22 февраля 2012 года . Проверено 27 мая 2009 г.
- ^ «НАСА выбирает студенческую заявку в качестве названия нового марсохода» . НАСА/Лаборатория реактивного движения. 27 мая 2009. Архивировано из оригинала 28 января 2012 года . Проверено 27 мая 2009 г.
- ^ «НАСА – Любопытство» .
- ↑ Перейти обратно: Перейти обратно: а б с Амос, Джонатан (22 июля 2011 г.). «Марсоход нацелен на глубокий кратер» . Новости Би-би-си . Проверено 22 июля 2011 г.
- ↑ Перейти обратно: Перейти обратно: а б с Амос, Джонатан (12 июня 2012 г.). «Марсоход НАСА Curiosity нацелен на меньшую зону приземления» . Новости Би-би-си . Проверено 12 июня 2012 г.
- ^ Посадка: вопросы для обсуждения и научные критерии (Microsoft Word) . MSL – Семинар по посадочным площадкам. 15 июля 2008 г.
- ^ «Выживший: Марс — семь возможных мест посадки MSL» . Лаборатория реактивного движения . НАСА. 18 сентября 2008 года . Проверено 21 октября 2008 г.
- ^ «Руководство пользователя по выбору места посадки MSL по инженерным ограничениям» (PDF) . 12 июня 2006 года . Проверено 29 мая 2007 г.
- ^ «Резюме семинара MSL» (PDF) . 27 апреля 2007 года . Проверено 29 мая 2007 г.
- ^ «Мастерская второй посадочной площадки MSL» .
- ^ ГайМак (4 января 2008 г.). «Разведка объектов МСЛ» . Привет, блог . Проверено 21 октября 2008 г.
- ^ «Список мест для следующей посадки НАСА на Марс сужается» . Марс сегодня . 19 ноября 2008 года. Архивировано из оригинала 27 ноября 2008 года . Проверено 21 апреля 2009 г.
- ^ «Текущие места посадки MSL» . НАСА. Архивировано из оригинала 15 марта 2012 года . Проверено 4 января 2010 г.
- ^ «Поиск мест посадки марсианской научной лаборатории» . Ютуб . НАСА/Лаборатория реактивного движения. 27 мая 2009 г. Архивировано из оригинала 12 декабря 2021 г. Проверено 28 мая 2009 г.
- ^ «Последние 7 предполагаемых мест посадки» . НАСА. 19 февраля 2009. Архивировано из оригинала 13 апреля 2011 года . Проверено 9 февраля 2009 г.
- ^ НАСА, Лаборатория реактивного движения. «Возможное место посадки MSL: кратер Эберсвальде — Марсианская научная лаборатория» . Архивировано из оригинала 27 января 2012 года . Проверено 24 июня 2011 г.
- ^ НАСА, Лаборатория реактивного движения. «Возможное место посадки MSL: кратер Холден — Марсианская научная лаборатория» . Архивировано из оригинала 30 апреля 2012 года . Проверено 24 июня 2011 г.
- ^ НАСА, Лаборатория реактивного движения. «Кратер Гейла — марсианская научная лаборатория» . Архивировано из оригинала 17 января 2012 года . Проверено 24 июня 2011 г.
- ^ НАСА, Лаборатория реактивного движения. «Возможное место посадки MSL: Долина Маурта — Марсианская научная лаборатория» . Архивировано из оригинала 18 апреля 2009 года.
- ^ Презентации для четвертого семинара по посадочной площадке MSL, сентябрь 2010 г.
- ↑ Второе объявление о заключительном семинаре по посадочной площадке MSL и приеме документов. Архивировано 8 сентября 2012 г., archive.today , март 2011 г.
- ^ «Атлас V» . Объединенный стартовый альянс . Проверено 1 мая 2018 г.
- ^ «Марсианская научная лаборатория: Миссия: Ракета-носитель» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 11 марта 2009 года . Проверено 1 апреля 2009 г.
- ^ Кен Кремер (9 октября 2011 г.). «Сборка ракеты Curiosity на Марс» . Вселенная сегодня . Проверено 9 июля 2013 г.
- ^ Саттон, Джейн (3 ноября 2011 г.). «Новый марсоход НАСА достиг стартовой площадки во Флориде» . Рейтер .
- ^ Данн, Марсия (27 ноября 2011 г.). «НАСА запускает на Марс суперразмерный вездеход» . Ежедневный Сентинел . Ассошиэйтед Пресс. п. 5C – через Newspapers.com.
- ↑ Перейти обратно: Перейти обратно: а б «Ракета Atlas V United Launch Alliance успешно запускает марсианскую научную лабораторию НАСА в путешествии на Красную планету» . Информация о запуске ULA . Объединенный стартовый альянс. 26 ноября 2011. Архивировано из оригинала 20 июля 2015 года . Проверено 19 августа 2012 г.
- ^ Бэкингем, Брюс; Тринидад, Кэтрин (2 июня 2006 г.). «НАСА объявляет о контракте на запуск миссии научной лаборатории на Марс» . НАСА . Проверено 1 мая 2018 г.
- ^ Чанг, Кеннет (22 августа 2012 г.). «После путешествия в 352 миллиона миль, приветствуем 23 фута на Марсе» . Нью-Йорк Таймс . Проверено 18 октября 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б с д НАСА. «MSL – Конфигурация круиза» . Лаборатория реактивного движения . Проверено 8 августа 2012 г.
- ^ Дахья, Н. (1–8 марта 2008 г.). «Проектирование и изготовление космического корабля крылатой ступени для MSL». Аэрокосмическая конференция IEEE 2008 г. IEEE Исследование. стр. 1–6. дои : 10.1109/AERO.2008.4526539 . ISBN 978-1-4244-1487-1 . S2CID 21599522 .
- ^ «Следите за спуском «Кьюриосити» на Марс» . НАСА . 2012. Архивировано из оригинала 21 августа 2012 года . Проверено 23 августа 2012 г.
Анимация
- ^ «Орбитальный аппарат шпионит там, где круизный этап марсохода столкнулся с Марсом» . Лаборатория реактивного движения .
- ^ Харвуд, Уильям (26 ноября 2011 г.). «Марсианская научная лаборатория начинает круиз к Красной планете» . Космический полет сейчас . Архивировано из оригинала 27 апреля 2014 года . Проверено 21 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б Путь, Дэвид В.; и др. Марсианская научная лаборатория: Характеристики системы входа, спуска и посадки - системные и технологические проблемы при посадке на Землю, Луну и Марс (PDF) (Отчет). Архивировано из оригинала (PDF) 25 февраля 2014 г.
- ^ Баккони, Фабио (2006). «Динамика ориентации и управление космическим кораблем» (PDF) . Архивировано из оригинала (PDF) 12 мая 2013 года . Проверено 11 августа 2012 г.
- ^ «Отчет о состоянии — ежедневное обновление Curiosity» . НАСА. 6 августа 2012. Архивировано из оригинала 9 августа 2012 года . Проверено 13 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б «Подход к высадке на Марс: доставка больших полезных грузов на поверхность Красной планеты» . Вселенная сегодня . 18 июля 2007 года . Проверено 21 октября 2008 г.
- ^ «Миссия: Космический корабль» . НАСА . Проверено 12 июня 2018 г.
- ↑ Перейти обратно: Перейти обратно: а б с «Хронология миссии: вход, спуск и приземление» . НАСА и Лаборатория реактивного движения. Архивировано из оригинала 19 июня 2008 года . Проверено 7 октября 2008 г.
- ↑ Перейти обратно: Перейти обратно: а б Кипп, Д.; Сан-Мартин, М.; Эссмиллер, Дж.; Уэй, Д. (2007). «Триггеры входа, спуска и посадки в научную лабораторию Марса». Аэрокосмическая конференция IEEE 2007 г. IEEE. стр. 1–10. дои : 10.1109/AERO.2007.352825 . ISBN 978-1-4244-0524-4 . S2CID 7755536 .
- ^ Керр, Дара (9 августа 2012 г.). «Зрители предпочли смотреть приземление Curiosity через Интернет, а не по телевизору» . CNET . Проверено 9 августа 2012 г.
- ^ Эллисон, Дуг. «Брифинг MSL Sol 4» . Ютуб . Архивировано из оригинала 12 декабря 2021 года.
- ^ «MSL – Вход с гидом» . Лаборатория реактивного движения . НАСА. 2011 . Проверено 8 августа 2012 г.
- ^ Бругаролас, Пол Б.; Сан-Мартин, А. Мигель; Вонг, Эдвард К. «Контроллер ориентации RCS для экзоатмосферных фаз и фаз управляемого входа в марсианскую научную лабораторию» (PDF) . Планетарный зонд . Проверено 8 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час «Curiosity полагается на неиспытанный «небесный кран» для спуска на Марс» . Космический полет сейчас . 31 июля 2012 года . Проверено 1 августа 2012 г.
- ↑ НАСА, Большой теплозащитный экран для научной лаборатории Марса , 10 июля 2009 г. (дата обращения 26 марта 2010 г.)
- ↑ Перейти обратно: Перейти обратно: а б с «Последние минуты прибытия «Кьюриосити» на Марс» . НАСА/Лаборатория реактивного движения . Проверено 8 апреля 2011 г.
- ↑ Перейти обратно: Перейти обратно: а б «Квалификационные испытания парашютов в Марсианской научной лаборатории» . НАСА/Лаборатория реактивного движения . Проверено 15 апреля 2009 г.
- ^ «Марсианский десантный имиджер (МАРДИ)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 2 декабря 2009 г.
- ^ Лакдавалла, Эмили (6 августа 2012 г.). «Марсианский разведывательный орбитальный аппарат HiRISE сделал это снова!!» . НАСА . Планетарное общество . Проверено 6 августа 2012 г.
- ^ «Аэроджетные двигатели для марсианской научной лаборатории» . Аэроджет. Архивировано из оригинала 8 декабря 2012 года . Проверено 18 декабря 2010 г.
- ^ Небесный журавль - как посадить Curiosity на поверхность Марса, автор Амаль Шира Тейтель.
- ^ Снайдер, Майк Х (17 июля 2012 г.). «Марсоход приземляется в Xbox Live» . США сегодня . Проверено 27 июля 2012 г.
- ^ «Дополнения марсианского ландшафта к изображениям с орбитального аппарата НАСА» . НАСА . 8 августа 2012 года . Проверено 9 августа 2012 г.
- ^ BotJunkie (2 июня 2007 г.). «Марсианская научная лаборатория (Полная)» . Архивировано из оригинала 12 декабря 2021 г. – на YouTube.
- ^ Вебстер, Гай; Браун, Дуэйн (22 июля 2011 г.). «Следующий марсоход НАСА приземлится в кратере Гейла» . Лаборатория реактивного движения НАСА . Архивировано из оригинала 7 июня 2012 года . Проверено 22 июля 2011 г.
- ^ Чоу, Деннис (22 июля 2011 г.). «Следующий марсоход НАСА приземлится в огромном кратере Гейла» . Space.com . Проверено 22 июля 2011 г.
- ^ Сотрудники НАСА (27 марта 2012 г.). « Гора Шарп» на Марсе по сравнению с тремя большими горами на Земле . НАСА . Архивировано из оригинала 7 мая 2017 года . Проверено 31 марта 2012 г.
- ^ Сотрудники НАСА (10 августа 2012 г.). «Квадрат Любопытства – ОБРАЗ» . НАСА . Проверено 11 августа 2012 г.
- ^ Эгл, округ Колумбия; Вебстер, Гай; Браун, Дуэйн (9 августа 2012 г.). «Curiosity НАСА передает цвет 360° ящика Гейла» . НАСА . Архивировано из оригинала 2 июня 2019 года . Проверено 11 августа 2012 г.
- ^ Амос, Джонатан (9 августа 2012 г.). «Марсоход сделал первую цветную панораму» . Новости Би-би-си . Проверено 9 августа 2012 г.
- ^ Халворсон, Тодд (9 августа 2012 г.). «Квад 51: Название базы на Марсе вызывает богатые параллели на Земле» . США сегодня . Проверено 12 августа 2012 г.
- ^ « Впечатляющий «Кьюриосити» приземлился всего в 1,5 милях от нас, сообщает НАСА» . 14 августа 2012 года . Проверено 20 августа 2012 г.
- ↑ Перейти обратно: Перейти обратно: а б Браун, Дуэйн; Коул, Стив; Вебстер, Гай; Эгл, округ Колумбия (22 августа 2012 г.). «Марсоход НАСА начинает движение по приземлению Брэдбери» . НАСА . Архивировано из оригинала 15 ноября 2016 года . Проверено 22 августа 2012 г.
- ^ Чанг, Кеннет (5 октября 2015 г.). «Марс довольно чистый. Ее работа в НАСА — поддерживать его таким» . Нью-Йорк Таймс . Проверено 6 октября 2015 г.
Дальнейшее чтение [ править ]
- МК Локвуд (2006). «Введение: Марсианская научная лаборатория: следующее поколение марсианских кораблей и следующие 13 статей» (PDF) . Журнал космических кораблей и ракет . 43 (2). Американский институт аэронавтики и астронавтики : 257. Бибкод : 2006JSpRo..43..257L . дои : 10.2514/1.20678 . Архивировано из оригинала (PDF) 9 августа 2012 года . Проверено 13 ноября 2006 г.
- Гротцингер, JP; Крисп, Дж .; Васавада, Арканзас; Андерсон, RC; Бейкер, CJ; Барри, Р.; Блейк, DF; Конрад, П.; Эджетт, Канзас; Фердовски, Б.; Геллерт, Р.; Гилберт, Дж. Б.; Голомбек, М.; Гомес-Эльвира, Дж.; Хасслер, DM; Яндура, Л.; Литвак, М.; Махаффи, П.; Маки, Дж.; Мейер, М.; Малин, MC; Митрофанов И.; Симмондс, Джей-Джей; Ваниман, Д.; Уэлч, Р.В.; Винс, Р.К. (2012). «Миссия научной лаборатории Марса и научные исследования» . Обзоры космической науки . 170 (1–4): 5–56. Бибкод : 2012ССРв..170....5Г . дои : 10.1007/s11214-012-9892-2 . - обзорная статья о MSL, месте посадки и приборах.
Внешние ссылки [ править ]
- Домашняя страница MSL
- Научные публикации членов команды MSL ( PDF )
- MSL – Пресс-кит для СМИ (ноябрь 2011 г.) ( PDF )
- Галерея изображений
- MSL - Видео канала новостей НАСА / Лаборатории реактивного движения
- MSL – Вход, спуск и посадка (EDL) – Анимированное видео (02:00)
- MSL – Новости НАСА – *ПОВТОР* В любое время (НАСА-YouTube)
- MSL – « Земли любопытства » (06.08.2012) – НАСА/Лаборатория реактивного движения – Видео (03:40)
- Видео спуска: симуляционное и реальное/с комментарием , MSL в реальном времени/25 кадров в секунду , все/4 кадра в секунду , HiRise
- MSL – Приземление («7 минут ужаса»)
- MSL - Место посадки - Кратер Гейла - Анимированное видео с озвучкой (02:37)
- MSL – Краткое описание миссии – Анимированное/расширенное видео (11:20)
- MSL – « Запуск Curiosity » (26.11.2011) – НАСА/Кеннеди – Видео (04:00)
- MSL – Виртуальный тур НАСА/Лаборатории реактивного движения – Ровер
- MSL – Вход, спуск и посадка (EDL) – Хронология/ieee
- MSL – Вход, спуск и посадка (EDL) – Описание. ( PDF )
- MSL – Предпусковая подготовка на KSC (изображения высокого разрешения и сферические панорамы) [ постоянная мертвая ссылка ]
- MSL – Raw Images , листинг JPL (официальный)




