Программа Викинг
 Впечатление художника от орбитального корабля "Викинг", выпускающего спускаемую капсулу | |
| Производитель | Лаборатория реактивного движения / Мартин Мариетта |
|---|---|
| Страна происхождения | Соединенные Штаты |
| Оператор | НАСА / Лаборатория реактивного движения |
| Приложения | Марсианский орбитальный аппарат/посадочный модуль |
| Технические характеристики | |
| Стартовая масса | 3527 кг (7776 фунтов) |
| Власть | Орбитальные аппараты: 620 Вт ( солнечная батарея ) Посадочный модуль: 70 Вт (два РИТЭГ ) блока |
| Режим | Ареоцентрический |
| Дизайн жизни | Орбитальные аппараты: 4 года на Марсе Лендеры: 4–6 лет на Марсе. |
| Производство | |
| Статус | Ушедший на пенсию |
| Построен | 2 |
| Запущен | 2 |
| Ушедший на пенсию | Викинг-1 Орбитальный аппарат 17 августа 1980 г. [1] Викинг 1 земли 20 июля 1976 г. [1] (посадка) по 13 ноября 1982 г. [1] Викинг-2 Орбитальный аппарат 25 июля 1978 г. [1] Викинг 2 земли 3 сентября 1976 г. [1] (посадка) по 11 апреля 1980 г. [1] |
| Первый запуск | Викинг 1 20 августа 1975 г. [1] [2] |
| Последний запуск | Викинг 2 9 сентября 1975 г. [1] [3] |
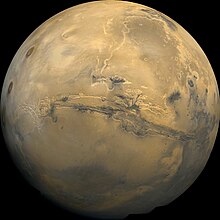
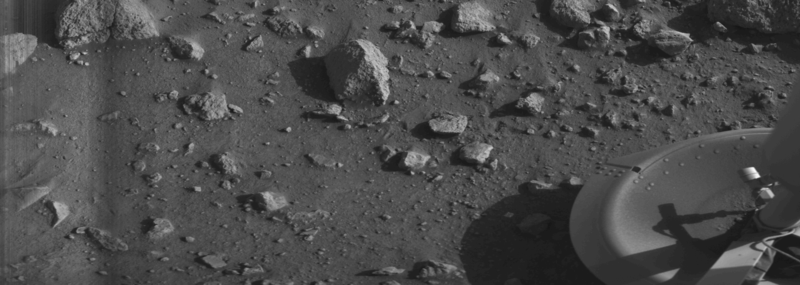
Программа «Викинг» состояла из пары идентичных американских космических зондов « Викинг-1» и «Викинг-2» , которые приземлились на Марсе в 1976 году. [1] Миссия началась в 1968 году и управлялась Исследовательским центром НАСА в Лэнгли. [4] Каждый космический корабль состоял из двух основных частей: орбитального аппарата, предназначенного для фотографирования поверхности Марса с орбиты , и посадочного модуля , предназначенного для изучения планеты с поверхности. Орбитальные аппараты также служили ретрансляторами связи для посадочных модулей после их приземления.
Программа «Викинг» выросла из программы НАСА более ранней, еще более амбициозной «Вояджер Марс» , которая не была связана с успешными исследованиями глубокого космоса «Вояджер» в конце 1970-х годов. «Викинг-1» был запущен 20 августа 1975 года, а второй корабль, «Викинг-2» , был запущен 9 сентября 1975 года, оба они летели на «Титан IIIE» ракетах с верхними ступенями «Кентавр» . «Викинг-1» вышел на орбиту Марса 19 июня 1976 года, а «Викинг-2» последовал за ним 7 августа.
После более чем месяца пребывания на орбите Марса и получения изображений, использованных для выбора места посадки, орбитальные аппараты и посадочные аппараты отсоединились; Затем посадочные аппараты вошли в атмосферу Марса и мягко приземлились в выбранных местах. Посадочный модуль «Викинг-1» приземлился на поверхности Марса 20 июля 1976 года, более чем за две недели до «Викинга-2 » выхода на орбиту. Затем 3 сентября «Викинг-2» успешно совершил мягкую посадку. Орбитальные аппараты продолжали получать изображения и выполнять другие научные операции с орбиты, в то время как спускаемые аппараты разворачивали инструменты на поверхности.
На момент запуска стоимость проекта составляла примерно 1 миллиард долларов США. [5] [6] эквивалентно примерно 6 миллиардам долларов в долларах 2023 года. [7] Миссия была признана успешной, и ей приписывают помощь в формировании большей части знаний о Марсе в конце 1990-х - начале 2000-х годов. [8] [9]
цели Научные
- Получите изображения поверхности Марса в высоком разрешении.
- Охарактеризуйте строение и состав атмосферы и поверхности.
- Поиск доказательств жизни на Марсе
Орбитальные аппараты «Викинг» [ править ]
Основными задачами двух орбитальных аппаратов «Викинг» была транспортировка посадочных модулей на Марс, проведение разведки для определения местоположения и сертификации посадочных площадок, выполнение функций ретрансляторов связи для посадочных модулей и проведение собственных научных исследований. Каждый орбитальный аппарат, созданный на основе более раннего космического корабля Mariner 9 , представлял собой восьмиугольник диаметром примерно 2,5 м (8,2 фута). Полностью заправленная топливом пара орбитальный аппарат-посадочный модуль имела массу 3527 кг (7776 фунтов). После отделения и приземления посадочный модуль имел массу около 600 кг (1300 фунтов), а орбитальный аппарат - 900 кг (2000 фунтов). Общая стартовая масса составляла 2328 кг (5132 фунта), из которых 1445 кг (3186 фунтов) приходилось на топливо и для ориентации газ . Восемь граней кольцеобразной конструкции имели высоту 0,457 м (18 дюймов) и ширину попеременно 1,397 и 0,508 м (55 и 20 дюймов). Общая высота составляла 3,29 м (10,8 футов) от точек крепления спускаемого аппарата внизу до точек крепления ракеты-носителя сверху. Модульных отсеков было 16: по 3 на каждой из 4 длинных граней и по одному на каждой короткой грани. Четыре крыла солнечных батарей выдвинуты из оси орбитального аппарата расстояние от кончика до кончика двух противоположно вытянутых солнечных панелей составляло 9,75 м (32 фута).
Движение [ править ]
Основная двигательная установка монтировалась над автобусом орбитального корабля . Движение обеспечивалось двухкомпонентным ( монометилгидразин и тетраоксид азота жидкостным ракетным двигателем которого мог ), угол наклона достигать 9 градусов . Двигатель имел тягу 1323 Н (297 фунтов силы ), обеспечивая изменение скорости 1480 м/с (3300 миль в час). Управление ориентацией осуществлялось с помощью 12 небольших струй сжатого азота.
[ править ]
Датчик Солнца , круизный датчик Солнца, Канопус звездный трекер и инерциальный опорный блок, состоящий из шести гироскопов, обеспечивали трехосную стабилизацию. два акселерометра На борту также находились .
Связь осуществлялась через мощностью 20 Вт S-диапазона (2,3 ГГц ) передатчик и два мощностью 20 Вт ЛБВ . Нисходящая в диапазоне X (8,4 ГГц) линия связи была также добавлена специально для радионауки и проведения экспериментов по связи. Восходящая связь осуществлялась через диапазон S (2,1 ГГц). Двухосная управляемая параболическая параболическая антенна диаметром примерно 1,5 м была прикреплена к одному краю основания орбитального корабля, а фиксированная антенна с низким коэффициентом усиления выдвигалась из верхней части автобуса. Два магнитофона были способны хранить по 1280 мегабит каждый . Также была доступна релейная радиостанция на 381 МГц . [ нужна ссылка ]
Мощность [ править ]
Электроэнергия для двух орбитальных кораблей обеспечивалась восемью солнечными панелями размером 1,57 × 1,23 м (62 × 48 дюймов) , по две на каждом крыле. Солнечные панели на Марсе состояли в общей сложности из 34 800 солнечных элементов и производили 620 Вт энергии. Энергия также хранилась в двух никель-кадмиевых емкостью 30 А·ч батареях .
Общая площадь четырех панелей составляла 15 квадратных метров (160 квадратных футов), и они обеспечивали как регулируемую, так и нерегулируемую мощность постоянного тока; На радиопередатчик и спускаемый аппарат подавалось нерегулируемое питание.
Две никель-кадмиевые аккумуляторные батареи емкостью 30 ампер/час обеспечивали питание, когда космический корабль не был обращен к Солнцу, во время запуска, при выполнении корректирующих маневров, а также во время затмения Марса. [10]
Основные выводы
Обнаружив множество геологических форм, которые обычно образуются из большого количества воды, изображения с орбитальных аппаратов произвели революцию в наших представлениях о воде на Марсе . Во многих районах были обнаружены огромные речные долины. Они показали, что потоки воды прорывали плотины, прорезали глубокие долины, размывали бороздки в скалах и преодолевали тысячи километров. На больших территориях южного полушария существовала разветвленная сеть ручьев, что позволяет предположить, что когда-то выпадал дождь. Считается, что склоны некоторых вулканов подверглись воздействию осадков, поскольку они напоминают те, что выпадают на гавайских вулканах. Многие кратеры выглядят так, будто ударник упал в грязь. Когда они образовались, лед в почве, возможно, растаял, превратил землю в грязь, а затем растекся по поверхности. Обычно материал от удара поднимается вверх, затем вниз. Он не течет по поверхности, огибая препятствия, как это происходит в некоторых марсианских кратерах. [11] [12] [13] Регионы, получившие название « Хаотическая местность », похоже, быстро потеряли большие объемы воды, что привело к образованию крупных каналов. По оценкам, количество вовлеченной воды в десять тысяч раз превышало сток реки Миссисипи . [14] Подземный вулканизм мог растопить замерзший лед; Затем вода утекла, и земля рухнула, оставив хаотичную местность.
 Обтекаемые острова показывают, что на Марсе произошли крупные наводнения.
Обтекаемые острова показывают, что на Марсе произошли крупные наводнения.
( Четырехугольник Lunae Palus ) Образцы размыва создавались проточной водой. Кратер Дромор находится внизу.
Образцы размыва создавались проточной водой. Кратер Дромор находится внизу.
( Четырехугольник Lunae Palus ) Большие потоки воды, вероятно, разрушили каналы вокруг Дромор . кратера
Большие потоки воды, вероятно, разрушили каналы вокруг Дромор . кратера
( Четырехугольник Lunae Palus ) Острова каплевидной формы, высеченные паводковыми водами Долины Ареса .
Острова каплевидной формы, высеченные паводковыми водами Долины Ареса .
( Оксиа Палус четырехугольник )
 Кратер Арандас может находиться на вершине большого количества водяного льда, который растаял в момент удара, вызвав выброс, похожий на грязь.
Кратер Арандас может находиться на вершине большого количества водяного льда, который растаял в момент удара, вызвав выброс, похожий на грязь.
( Морской ацидалиум четырехугольник )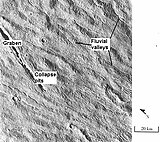
 Разветвленные каналы в четырехугольнике Таумасия являются возможным свидетельством прошлых дождей на Марсе.
Разветвленные каналы в четырехугольнике Таумасия являются возможным свидетельством прошлых дождей на Марсе. Эти разветвленные каналы являются возможным свидетельством прошлых дождей на Марсе. ( Четырехугольник Маргаритифера Синуса )
Эти разветвленные каналы являются возможным свидетельством прошлых дождей на Марсе. ( Четырехугольник Маргаритифера Синуса ) Рави Валлис, возможно, образовался в результате сильного наводнения.
Рави Валлис, возможно, образовался в результате сильного наводнения.
( Четырехугольник Маргаритифера Синуса )










Посадочные корабли викингов [ править ]


Каждый посадочный модуль состоял из шестигранного алюминиевого основания с чередующимися сторонами длиной 1,09 и 0,56 м (43 и 22 дюйма), поддерживаемого тремя удлиненными ножками, прикрепленными к более коротким сторонам. Подушечки ног образовывали вершины равностороннего треугольника со сторонами 2,21 м (7,3 фута), если смотреть сверху, причем длинные стороны основания образовывали прямую линию с двумя соседними подушечками ног. Приборы крепились внутри и сверху основания, возвышаясь над поверхностью на выдвинутых ножках. [15]
Каждый посадочный модуль был заключен в аэродинамический тепловой экран, предназначенный для замедления посадочного модуля на этапе входа. Чтобы предотвратить загрязнение Марса земными организмами, каждый посадочный модуль после сборки и помещения в аэрооболочку был заключен в герметичный «биощит», а затем стерилизовался при температуре 111 ° C (232 ° F) в течение 40 часов. По термическим причинам крышка биологического щита была сброшена после того, как верхняя ступень «Кентавр» вывела комбинацию орбитального корабля и спускаемого аппарата «Викинг» с околоземной орбиты. [16]
Астроном Карл Саган помог выбрать места посадки обоих зондов «Викинг» . [17]
Вход, спуск и приземление (EDL) [ править ]
Каждый посадочный модуль прибыл на Марс прикрепленный к орбитальному аппарату. Сборка много раз вращалась вокруг Марса, прежде чем спускаемый аппарат был выпущен и отделен от орбитального аппарата для спуска на поверхность. Спуск состоял из четырех отдельных этапов, начиная с схода с орбиты . Затем посадочный модуль вошел в атмосферу, причем пик нагрева произошел через несколько секунд после начала фрикционного нагрева с марсианской атмосферой. На высоте около 6 километров (3,7 мили) и скорости 900 километров в час (600 миль в час) парашют раскрылся, аэроснаряд высвободился, и опоры посадочного модуля развернулись. На высоте около 1,5 километров (5000 футов) посадочный модуль активировал три ретродвигателя и выпустился из парашюта. Затем посадочный модуль немедленно применил ретро-ракеты, чтобы замедлить и контролировать спуск, совершив мягкую посадку на поверхность Марса. [18]
При приземлении (после использования ракетного топлива) спускаемые аппараты имели массу около 600 кг.
Движение [ править ]
Движение для схода с орбиты обеспечивалось монотопливным гидразином (N 2 H 4 ) через ракету с 12 соплами, расположенными в четырех группах по три, что обеспечивало тягу 32 ньютона (7,2 фунта- фута ), что приводило к изменению скорости 180 м/с. (590 футов/с). управления Эти сопла также выполняли роль двигателей перемещением . и вращением посадочного модуля
В конечном спуске (после использования парашюта ) и приземлении использовались три (по одному на каждой длинной стороне основания, разделенные на 120 градусов) монотопливные гидразиновые двигатели. Двигатели имели 18 сопел для рассеивания выхлопных газов и минимизации воздействия на землю, а мощность дросселирования составляла от 276 до 2667 ньютонов (от 62 до 600 фунтов силы ). Гидразин был очищен, чтобы предотвратить заражение марсианской поверхности земными микробами . При запуске посадочный модуль нес 85 кг (187 фунтов) топлива, которое содержалось в двух сферических титановых баках, установленных на противоположных сторонах посадочного модуля под ветровыми стеклами РИТЭГ, что давало общую стартовую массу 657 кг (1448 фунтов). Управление осуществлялось за счет использования инерциальной опорной установки , четырех гироскопов , радиовысотомера конечного спуска и посадки , РЛС , а также двигателей управления.
Мощность [ править ]
Электроэнергия обеспечивалась двумя радиоизотопными термоэлектрическими генераторами (РТГ), содержащими плутоний-238 , прикрепленными к противоположным сторонам основания спускаемого аппарата и закрытыми ветровыми экранами. Каждый РТГ «Викинг» [19] имел высоту 28 см (11 дюймов), диаметр 58 см (23 дюйма), массу 13,6 кг (30 фунтов) и обеспечивал 30 Вт непрерывной мощности при 4,4 В. На борту также находились четыре емкостью герметичные никель-кадмиевые 8 Ач (28 800 кулонов ) и напряжением 28 В, аккумуляторные батареи способные выдерживать пиковые нагрузки.
Полезная нагрузка [ править ]

Связь [ править ]
Связь осуществлялась через 20-ваттный передатчик S-диапазона с использованием двух ламп бегущей волны . Двухосная управляемая параболическая антенна с высоким коэффициентом усиления была установлена на стреле возле одного края основания посадочного модуля. Всенаправленная антенна S-диапазона с низким коэффициентом усиления также простиралась от основания. Обе эти антенны позволяли напрямую связываться с Землей, позволяя «Викингу-1» продолжать работу еще долго после того, как оба орбитальных аппарата вышли из строя. Антенна УВЧ (381 МГц) обеспечивала одностороннюю ретрансляцию с орбитальным аппаратом с помощью ретрансляционной радиостанции мощностью 30 Вт. Хранение данных осуществлялось на магнитофоне емкостью 40 Мбит, а посадочный компьютер имел память на 6000 слов для командных инструкций.
Инструменты [ править ]
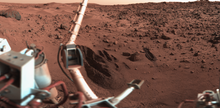
Посадочный модуль нес инструменты для достижения основных научных целей миссии посадочного модуля: изучения биологии , химического состава ( органического и неорганического ), метеорологии , сейсмологии , магнитных свойств, внешнего вида и физических свойств марсианской поверхности и атмосферы. Две камеры цилиндрического сканирования с обзором на 360 градусов были установлены возле одной длинной стороны основания. Из центра этой стороны выдвигался рычаг пробоотборника с коллекторной головкой, датчиком температуры и магнитом на конце. Метеорологическая стрела, фиксирующая температуру, направление ветра и датчики скорости ветра, выдвигалась вперед и вверх от вершины одной из опор посадочного модуля. , сейсмометр магнит и тестовые мишени для камер , а также увеличительное зеркало Напротив камер, рядом с антенной с высоким коэффициентом усиления, установлены . Во внутреннем отсеке с контролируемой средой проводились биологические эксперименты и газовый хроматограф- масс-спектрометр. спектрометр рентгенофлуоресцентный Внутри конструкции также был установлен давления . . Под корпусом спускаемого аппарата был закреплен датчик Научный полезная нагрузка имела общую массу около 91 кг (201 фунт).
Биологические эксперименты [ править ]
Посадочные аппараты «Викинг» провели биологические эксперименты, направленные на обнаружение жизни в марсианской почве (если она существовала), с помощью экспериментов, разработанных тремя отдельными группами под руководством главного ученого Джеральда Соффена из НАСА. Один эксперимент оказался положительным для обнаружения метаболизма (текущей жизни), но на основе результатов двух других экспериментов, которые не смогли обнаружить никаких органических молекул в почве, большинство ученых пришли к убеждению, что положительные результаты, вероятно, были вызваны небиологическими факторами. химические реакции от сильно окислительных почвенных условий. [20]
Хотя во время миссии НАСА сделало заявление о том, что результаты спускаемого аппарата «Викинг» не продемонстрировали убедительных биосигнатур в почвах на двух площадках приземления, результаты испытаний и их ограничения все еще находятся на стадии оценки. Достоверность положительных результатов «меченого высвобождения» (LR) полностью зависела от отсутствия окислительного агента в марсианской почве, но позже он был обнаружен спускаемым «Феникс» аппаратом в форме перхлоратных солей. [21] [22] Было высказано предположение, что органические соединения могли присутствовать в почве, анализируемой как «Викингом-1» , так и «Викингом-2» , но остались незамеченными из-за присутствия перхлората, обнаруженного «Фениксом» в 2008 году. [23] Исследователи обнаружили, что перхлорат разрушает органику при нагревании и производит хлорметан и дихлорметан — идентичные соединения хлора, обнаруженные обоими посадочными модулями «Викинг», когда они проводили одни и те же испытания на Марсе. [24]
Вопрос о микробной жизни на Марсе остается нерешенным. Тем не менее, 12 апреля 2012 года международная группа ученых сообщила об исследованиях, основанных на математических предположениях посредством анализа сложности экспериментов с меченым выпуском миссии «Викинг» 1976 года, которые могут предполагать обнаружение «существующей микробной жизни на Марсе». [25] [26] Кроме того, в 2018 году были опубликованы новые результаты повторного исследования результатов газового хроматографа-масс-спектрометра (ГХМС). [27]
Камера/система обработки изображений [ править ]
Руководителем группы изображений был Томас А. Матч , геолог из Университета Брауна в Провиденсе, Род-Айленд . В камере используется подвижное зеркало для подсветки 12 фотодиодов . Каждый из 12 кремниевых диодов чувствителен к разным частотам света.
Несколько широкополосных диодов (обозначенных BB1, BB2, BB3 и BB4) расположены для точной фокусировки на расстояниях от шести до 43 футов от посадочного модуля. [28] Широкополосный диод низкого разрешения получил название SURVEY. [28] Также имеются три узкополосных диода низкого разрешения (СИНИЙ, ЗЕЛЕНЫЙ и КРАСНЫЙ) для получения цветных изображений и еще три (IR1, IR2 и IR3) для инфракрасных изображений. [28]
Камеры сканировали со скоростью пять строк вертикального сканирования в секунду, каждая из которых состоит из 512 пикселей. Панорамные изображения с углом обзора 300 градусов состояли из 9150 строк. Сканирование камер было достаточно медленным, поэтому на снимке экипажа, сделанном во время разработки системы визуализации, несколько членов группы несколько раз появлялись в кадре, когда они двигались во время сканирования камеры. [29] [30]
Массовая поломка посадочных модулей » « Викинг
| Элемент | Масса, кг (фунты) [31] |
|---|---|
| Структуры и механизмы | 132 кг (291 фунт) |
| Движение | 56 кг (123 фунта) |
| Пиро и кабели | 43 кг (95 фунтов) |
| Термический контроль | 36 кг (79 фунтов) |
| Руководство и контроль | 79 кг (174 фунта) |
| Власть | 103 кг (227 фунтов) |
| Связь/Телеметрия | 57 кг (126 фунтов) |
| Научные инструменты | 91 кг (201 фунт) |
| = Общая сухая масса | 595 кг (1312 фунтов) |
| + Посадочное топливо (включая остатки ~ 15 кг (33 фунта)) | 84 кг (185 фунтов) |
| +Замедлитель (включая топливо для спуска с орбиты посадочного модуля) | 118 кг (260 фунтов) |
| +Аэрошелл | 269 кг (593 фунта) |
| +Биощит | 74 кг (163 фунта) |
| +Кепка | 54 кг (119 фунтов) |
| = Общая стартовая масса (посадочный модуль+летная капсула) | 1194 кг (2632 фунта) |

Системы управления [ править ]
На посадочных модулях «Викинг» использовался компьютер наведения, управления и последовательности (GCSC), состоящий из двух 24-битных компьютеров Honeywell HDC 402 с 18 КБ памяти с металлическими проводами , в то время как орбитальные аппараты «Викинг» использовали подсистему командного компьютера (CCS) с двумя специально разработанными 18-битными компьютерами. -битные последовательные процессоры. [32] [33] [34]
Финансовые затраты программы « » Викинг
На тот момент два орбитальных аппарата стоили 217 миллионов долларов США, что составляет около 1 миллиарда долларов в долларах 2023 года. [35] [36] Самой дорогой частью программы был блок обнаружения жизни посадочного модуля, который стоил тогда около 60 миллионов долларов или 400 миллионов долларов в долларах 2023 года. [35] [36] Разработка конструкции спускаемого аппарата «Викинг» обошлась в 357 миллионов долларов. [35] Это было за несколько десятилетий до подхода НАСА «быстрее, лучше, дешевле», и «Викингу» нужно было внедрять беспрецедентные технологии под национальным давлением, вызванным холодной войной и последствиями космической гонки , и все это под перспективой возможного открытия внеземной жизни впервые. время. [35] Эксперименты должны были проводиться в соответствии со специальной директивой 1971 года, согласно которой ни один сбой не должен останавливать повторение более чем одного эксперимента — сложная и дорогая задача для устройства, состоящего из более чем 40 000 деталей. [35]
Разработка системы камер Viking обошлась в 27,3 миллиона долларов, или около 200 миллионов долларов в ценах 2023 года. [35] [36] Когда разработка системы визуализации была завершена, было трудно найти кого-либо, кто мог бы изготовить ее усовершенствованную конструкцию. [35] Позже менеджеров программы хвалили за то, что они не поддались давлению и предложили использовать более простую и менее совершенную систему визуализации, особенно когда стали поступать снимки. [35] Однако программа сэкономила немного денег за счет исключения третьего посадочного модуля и сокращения количества экспериментов на нем. [35]
В целом НАСА сообщает, что на программу было потрачено 1 миллиард долларов в долларах 1970-х годов. [5] [6] что с поправкой на инфляцию в долларах 2023 года составляет около 6 миллиардов долларов. [36]
Конец миссии [ править ]
В конечном итоге все корабли один за другим вышли из строя следующим образом: [1]
| Ремесло | Дата прибытия | Дата отключения | Срок эксплуатации | Причина неудачи |
|---|---|---|---|---|
| Викинг-2 Орбитальный аппарат | 7 августа 1976 г. | 25 июля 1978 г. | 1 год, 11 месяцев, 18 дней | Остановка после утечки топлива в двигательной установке. |
| Викинг 2 земли | 3 сентября 1976 г. | 11 апреля 1980 г. | 3 года, 7 месяцев, 8 дней | Выключение после выхода из строя батареи. |
| Викинг-1 Орбитальный аппарат | 19 июня 1976 г. | 17 августа 1980 г. | 4 года, 1 месяц, 19 дней | Останов после исчерпания топлива системы ориентации . |
| Викинг 1 земли | 20 июля 1976 г. | 13 ноября 1982 г. | 6 лет, 3 месяца, 22 дня | Выключение после человеческой ошибки во время обновления программного обеспечения привело к отключению антенны посадочного модуля, в результате чего было прекращено питание и связь. |
Программа «Викинг» завершилась 21 мая 1983 года. Чтобы предотвратить неминуемое столкновение с Марсом, орбита орбитального аппарата «Викинг-1» была поднята 7 августа 1980 года, а через 10 дней он был остановлен. Воздействие и потенциальное загрязнение поверхности планеты возможно начиная с 2019 года. [5]
посадки . обнаружил, что спускаемый аппарат «Викинг-1» находится примерно в 6 километрах от запланированного места марсианский разведывательный орбитальный аппарат В декабре 2006 года [37]
Артефакт сообщения [ править ]
На каждом посадочном модуле «Викинг» был небольшой микрофильм с именами нескольких тысяч человек, участвовавших в миссии. [38] Несколько более ранних космических зондов несли артефакты-сообщения, такие как мемориальная доска «Пионер» и « Золотая пластинка Вояджера» . Более поздние зонды также несли мемориалы или списки имен, например, марсоход Perseverance , который узнает почти 11 миллионов человек, которые подписались, чтобы включить свои имена в миссию.
Места высадки викингов [ править ]

 Кликабельное изображение: при нажатии на метки откроется новая статья.
Кликабельное изображение: при нажатии на метки откроется новая статья. См. также [ править ]
- Исследование Марса
- Жизнь на Марсе - Научные оценки микробной обитаемости Марса
- Список миссий на Марс
- Марсианская научная лаборатория - роботизированная миссия, которая отправила марсоход Curiosity на Марс в 2012 году.
- Mars Pathfinder - Миссия, включая первый роботизированный вездеход, работающий на Марсе (1997 г.)
- Норман Л. Крэбилл
Ссылки [ править ]
- ^ Jump up to: Перейти обратно: а б с д и ж г час я дж Уильямс, Дэвид Р. доктор (18 декабря 2006 г.). «Миссия викингов на Марс» . НАСА . Архивировано из оригинала 6 декабря 2023 года . Проверено 2 февраля 2014 г.
- ^ Нельсон, Джон. «Викинг 1» . Лаборатория реактивного движения . Архивировано из оригинала 24 октября 2023 года . Проверено 2 февраля 2014 г.
- ^ Нельсон, Джон. «Викинг 2» . Лаборатория реактивного движения . Архивировано из оригинала 8 октября 2023 года . Проверено 2 февраля 2014 г.
- ^ Соффен, Джорджия (июль – август 1978 г.). «Марс и замечательные результаты викингов». Журнал космических кораблей и ракет . 15 (4): 193–200.
- ^ Jump up to: Перейти обратно: а б с «Детали космического корабля «Викинг-1»» . Координированный архив данных НАСА по космическим наукам . НАСА. 20 марта 2019 г. Проверено 10 июля 2019 г.
- ^ Jump up to: Перейти обратно: а б Хауэлл, Элизабет (26 октября 2012 г.). «Викинг-1: первый американский посадочный модуль на Марс» . Space.com . Архивировано из оригинала 6 сентября 2023 года . Проверено 13 декабря 2016 г.
- ^ Джонстон, Луи; Уильямсон, Сэмюэл Х. (2023). «Какой тогда был ВВП США?» . Измерительная ценность . Проверено 30 ноября 2023 г. США Показатели дефлятора валового внутреннего продукта соответствуют серии MeasuringWorth .
- ^ «Программа Викинг» . Центр планетарных наук. Архивировано из оригинала 20 ноября 2023 года . Проверено 13 апреля 2018 г.
- ^ «Лендер Викингов» . Калифорнийский научный центр . 3 июля 2014 года. Архивировано из оригинала 27 мая 2023 года . Проверено 13 апреля 2018 г.
- ^ «Информационный бюллетень о викингах» (PDF) . Лаборатория реактивного движения . Архивировано из оригинала (PDF) 10 марта 2012 года . Проверено 27 марта 2012 г.
- ^ Киффер, Хью Х.; Якоски, Брюс М.; Снайдер, Конвей В.; Мэтьюз, Милдред С., ред. (1992). Марс . Пресса Университета Аризоны . ISBN 978-0-8165-1257-7 . LCCN 92010951 . Проверено 7 марта 2011 г.
- ^ Реберн, Пол (1998). Малрой, Кевин (ред.). Марс: раскрывая тайны Красной планеты . Национальное географическое общество . ISBN 0-7922-7373-7 . LCCN 98013991 .
- ^ Мур, Патрик; Хант, Гарри; Николсон, Иэн; Каттермоул, Питер (1990). Чеснок, Джуди (ред.). Атлас Солнечной системы . Митчелл Бизли . ISBN 0-86134-125-2 .
- ^ Мортон, Оливер (2002). Картирование Марса: наука, воображение и рождение мира . Пикадор . ISBN 0-312-24551-3 .
- ^ Журналы Hearst (июнь 1976 г.). «Удивительные поиски жизни на Марсе» . Популярная механика . Журналы Херста. стр. 61–63.
- ^ Соффен, Джорджия; Снайдер, CW (27 августа 1976 г.). «Первая миссия викингов на Марс» . Наука . 193 (4255): 759–766. Бибкод : 1976Sci...193..759S . дои : 10.1126/science.193.4255.759 . ПМИД 17747776 . Архивировано из оригинала 11 февраля 2023 года . Проверено 21 декабря 2023 г.
- ^ Краг, Хельге. «Карл Саган» . Британская энциклопедия . Архивировано из оригинала 8 ноября 2023 года . Проверено 9 августа 2022 г.
- ^ «Викинг» . astro.if.ufrgs.br . Архивировано из оригинала 13 августа 2023 года.
- ^ «Информационный бюллетень по радиоизотопному термоэлектрическому генератору SNAP-19, предоставленный Управлением энергетических исследований и разработок (ERDA), диаграмма 2 — Управление энергетических исследований и разработок» . Google Искусство и культура . Проверено 9 августа 2022 г.
- ^ БИГЛ, ЛЮТЕР В.; и др. (август 2007 г.). «Концепция полевой астробиологической лаборатории НАСА на Марсе 2016». Астробиология . 7 (4): 545–577. Бибкод : 2007AsBio...7..545B . дои : 10.1089/ast.2007.0153 . ПМИД 17723090 .
- ^ Джонсон, Джон (6 августа 2008 г.). «Перхлорат обнаружен в марсианской почве» . Лос-Анджелес Таймс . Архивировано из оригинала 19 апреля 2023 года.
- ^ «Марсианская жизнь или нет? Команда НАСА «Феникс» анализирует результаты» . Наука Дейли . 6 августа 2008 г. Архивировано из оригинала 18 ноября 2023 г.
- ^ Наварро-Гонсалес, Рафаэль; Эдгар Варгас; Хосе де ла Роса; Алехандро К. Рага; Кристофер П. Маккей (15 декабря 2010 г.). «Повторный анализ результатов «Викинга» предполагает наличие перхлората и органики в средних широтах Марса» . Журнал геофизических исследований: Планеты . Том. 115, нет. Е12010. Архивировано из оригинала 9 января 2011 года . Проверено 7 января 2011 г.
- ^ Тан, Кер (15 апреля 2012 г.). «Жизнь на Марсе обнаружена миссией НАСА «Викинг»» . Нэшнл Географик . Архивировано из оригинала 15 апреля 2012 года . Проверено 13 апреля 2018 г.
- ^ Бьянкарди, Джорджо; Миллер, Джозеф Д.; Страат, Патрисия Энн; Левин, Гилберт В. (март 2012 г.). «Анализ сложности экспериментов по выпуску меченных викингов» . ИДЖАСС . 13 (1): 14–26. Бибкод : 2012IJASS..13...14B . дои : 10.5139/IJASS.2012.13.1.14 .
- ^ Клотц, Ирен (12 апреля 2012 г.). «Марсианские роботы-викинги нашли жизнь » . ДискавериНьюс . Проверено 16 апреля 2012 г.
- ^ Гузман, Мелисса; Маккей, Кристофер П.; Куинн, Ричард С.; Шопа, Кирилл; Давила, Альфонсо Ф.; Наварро-Гонсалес, Рафаэль; Фрессине, Кэролайн (2018). «Идентификация хлорбензола в наборах данных газового хроматографа-масс-спектрометра «Викинг»: повторный анализ данных миссии «Викинг», соответствующих ароматическим органическим соединениям на Марсе» (PDF) . Журнал геофизических исследований: Планеты . 123 (7): 1674–1683. Бибкод : 2018JGRE..123.1674G . дои : 10.1029/2018JE005544 . ISSN 2169-9100 . S2CID 133854625 . Архивировано (PDF) из оригинала 3 ноября 2020 г.
- ^ Jump up to: Перейти обратно: а б с «PDS: Информация о приборе» . pds.nasa.gov . Проверено 28 марта 2023 г.
- ^ Группа визуализации посадочного модуля «Викинг» (1978). «Глава 8: Камеры без изображений» . Марсианский пейзаж . НАСА. п. 22.
- ^ МакЭлхени, Виктор К. (21 июля 1976 г.). «Камеры Viking легкие, потребляют мало энергии, работают медленно» . Нью-Йорк Таймс . Архивировано из оригинала 22 февраля 2021 года . Проверено 28 сентября 2013 г.
- ^ «Ретро-двигательная установка марсианского модуля (IAF-99-S.2.02)» . Проверено 14 мая 2024 г.
- ^ Томайко, Джеймс (март 1988 г.). Компьютеры в космических полетах: опыт НАСА (технический отчет). НАСА . CR-182505. Архивировано из оригинала 6 мая 2023 года . Проверено 6 февраля 2010 г.
- ^ Холмберг, Нил А.; Роберт П. Фауст; Х. Милтон Холт (ноябрь 1980 г.). «Справочная публикация НАСА 1027: Проект космического корабля «Викинг-75» и сводка испытаний. Том 1 - Конструкция спускаемого модуля» (PDF) . НАСА . Проверено 6 февраля 2010 г.
- ^ Холмберг, Нил А.; Роберт П. Фауст; Х. Милтон Холт (ноябрь 1980 г.). «Справочная публикация НАСА 1027: Проект космического корабля «Викинг-75» и сводка испытаний. Том 2 - Проект орбитального аппарата» (PDF) . НАСА . Проверено 6 февраля 2010 г.
- ^ Jump up to: Перейти обратно: а б с д и ж г час я Маккарди, Ховард Э. (2001). Быстрее, лучше, дешевле: недорогие инновации в космической программе США . Джу Пресс. п. 68. ИСБН 978-0-8018-6720-0 .
- ^ Jump up to: Перейти обратно: а б с д США на душу населения. индекс инфляции номинального валового внутреннего продукта Поскольку программа «Викинг» представляла собой государственный расход, для расчетов с поправкой на инфляцию используется
- ^ Чендлер, Дэвид (5 декабря 2006 г.). «Мощная камера зонда обнаружила викингов на Марсе» . Новый учёный . Проверено 8 октября 2013 г.
- ^ «Видения Марса: тогда и сейчас» . Планетарное общество .
Дальнейшее чтение [ править ]
- На Марсе: исследование Красной планеты. Архивировано 5 февраля 2007 г., в Wayback Machine.
- Виды Марса с орбитального корабля «Викинг»
- Марсианский пейзаж СП-425
- Тематическая статья журнала «Аналитическая химия» о научной миссии космического корабля «Викинг»
- Краткое описание конструкции и испытаний космического корабля «Викинг-75». Конструкция посадочного модуля тома 1 - отчет НАСА. Архивировано 27 октября 2020 года в Wayback Machine.
- Краткое описание конструкции и испытаний космического корабля «Викинг-75». Конструкция орбитального корабля, том 2 - отчет НАСА. Архивировано 27 октября 2020 года в Wayback Machine.
- Краткое описание конструкции и испытаний космического корабля «Викинг-75». Том 3. Обзор инженерных испытаний - отчет НАСА. Архивировано 28 октября 2020 г. в Wayback Machine.
Внешние ссылки [ править ]
- Миссия НАСА Марс Викинг
- Миссия «Викинг» на Марс (NASA SP-334). Архивировано 7 августа 2013 года в Wayback Machine.
- Информационный бюллетень проекта Solar Views Viking
- Миссия Викингов на Марс. Архивировано 16 июля 2011 г., на Wayback Machine. видео
- Схема «Викинга» и профиль его полета
- Статья на веб-сайте Смитсоновского института авиации и космонавтики
- Проект образования и сохранения миссий «Викинг» на Марс (VMMEPP)
- Онлайн-выставка ВММЕПП
- 45 лет назад: «Викинг -1» приземлился на Марсе


