Марс Полярный Ландер
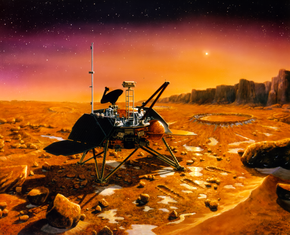 Художник изображение Марса Полярного Ландера на марсианской поверхности | |
| Имена | Марс -геодезист '98 Ландер |
|---|---|
| Тип миссии | Марс приземляется |
| Оператор | НАСА / JPL |
| Cospar Id | 1999-001a |
| Саткат нет. | 25605 |
| Веб -сайт | science.nasa.gov |
| Продолжительность миссии | 334 дня Провал миссии |
| Свойства космического корабля | |
| Производитель | Мартин Маритта |
| Запустить массу | 583 кг [ 1 ] |
| Власть | 200 Вт Солнечная батарея и NIH 2 батарея |
| Начало миссии | |
| Дата запуска | 20:21:10, 3 января 1999 г. (UTC) |
| Ракета | Дельта II 7425-9,5 D-265 |
| Сайт запуска | Кейп Канаверал SLC-17A |
| Подрядчик | Boeing |
| Конец миссии | |
| Утилизация | Провал связи после посадки |
| Объявлен | 17 января 2000 г. |
| Последний контакт | 20:00, 3 декабря 1999 г. (UTC) |
| Mars Impact (неудачная посадка) | |
| Дата воздействия | ~ 20: 15 UTC ERT , 3 декабря, |
| Ударный сайт | Последний склон , 76 ° S 195 ° W / 76 ° S 195 ° W (прогнозируется) |
| Mars Empactor | |
| Компонент космического корабля | Глубокое пространство 2 |
 Mars Surveyor 98 Логотип миссии | |

Mars Polar Lander , также известный как Mars Spexileor '98 Lander , был 290-килограммом роботизированным космическим кораблем, выпущенным NASA 3 января 1999 года, для изучения почвы и климата Планам Австралии , региона недалеко от Южного полюса на Марсе Полем Он сформировал часть миссии Mars Insulyor '98 . Однако 3 декабря 1999 года после того, как фаза спуска была завершена, Ландер не смог восстановить общение с Землей. Последующим анализом определил, что наиболее вероятной причиной неудачи было преждевременное прекращение стрельбы двигателя до того, как приземляется на поверхности, заставляя его ударить по планете с высокой скоростью. [ 2 ]
Общая стоимость Mars Polar Lander составила 165 миллионов долларов США. Развитие космического корабля стоило 110 миллионов долларов США, запуск оценивался в 45 миллионов долларов США, а миссия - 10 миллионов долларов США. [ 3 ]
Миссия
[ редактировать ]История
[ редактировать ]В рамках миссии Mars Surveyor '98 , пособия были искали как способ сбора климатических данных с земли в сочетании с орбитальным оператором. НАСА подозревалось, что большое количество замороженной воды может существовать под тонким слоем пыли на южном полюсе. При планировании Mars Polar Lander потенциальное содержание воды на южном полюсе Марсиан было самым сильным определяющим фактором для выбора места посадки. [ 4 ] CD-ROM, содержащий имена миллиона детей со всего мира, был размещен на борту космического корабля в рамках программы «Отправить свое имя на Марс», предназначенную, чтобы стимулировать интерес к космической программе среди детей. [ 5 ]
Основными целями миссии было: [ 6 ]
- земля на многослойной местности в южном полярном регионе Марса;
- Поиск доказательств, связанных с древним климатом и более поздним периодическим изменением климата;
- Дайте представление о нынешнем климате и сезонных изменениях в высоких широтах и, в частности, обмене водяного пара между атмосферой и землей;
- Ищите ближний грунтовый лед в полярных областях и проанализируйте почву для физического и химически связанного углекислого газа и воды; и
- поверхности изучения Морфология (формы и структуры), геология, топография и погода площадки посадки.
Глубокое пространство 2 зонды
[ редактировать ]Mars Polar Lander несли два небольших идентичных зондов -ударов , известных как «глубокое пространство 2 A и B». Зонды были предназначены для удара по поверхности с высокой скоростью примерно 73 ° S 210 ° W / 73 ° S 210 ° W чтобы проникнуть в марсианскую почву и изучить подземную композицию до метра в глубине. Однако после входа в марсианскую атмосферу попытки связаться с зондами не удалось. [ 4 ]
Deep Space 2 финансировалась новой программой Millennium , а их затраты на развитие составили 28 миллионов долларов США. [ 3 ]
Космический корабль дизайн
[ редактировать ]Космический корабль имел ширину 3,6 метра и высотой 1,06 метра, а ноги и солнечные батареи полностью развернуты. Основание было в основном построено с алюминиевой сотовой палубой, композитными графитами -эпоксидными листами, образующими край, и тремя алюминиевыми ногами. Во время посадки ноги должны были развернуться из усаженного положения с помощью сжатых пружин и поглощать силу посадки с помощью алюминиевых сотовых вставок в каждой ноге. На палубе посадки в небольшом корпусе с тепловой клеткой в Фарадее размещались компьютер, электронику распределения питания и батареи, телекоммуникационную электронику и компоненты тепловой трубы капиллярного насоса (LHP), которая поддерживала рабочую температуру. Каждый из этих компонентов включал избыточные подразделения в случае, когда можно потерпеть неудачу. [ 4 ] [ 1 ] [ 7 ]
Управление отношением и движением
[ редактировать ]Во время путешествия на Марс круизная сцена была трехосной стабилизированной с четырьмя гидразиновых монопропеллантов модулями двигателя реакции , каждый из которых включал в себя 22-нодовую поправочную модуль по коррекции траектории Ньютона для движения и 4-Ньютонский двигатель системы управления реакцией для контроля отношения (ориентация). Ориентация космического корабля была выполнена с использованием избыточных солнечных датчиков , звездных трекеров и инерционных измерительных единиц . [ 1 ]
Во время спуска приземление использовало три кластера модулированных импульсных двигателей, каждый из которых содержал четыре 266-Ньютон-гидразин-монопропеллантные двигатели. Высота во время посадки была измерена с помощью доплеровской радиолокационной системы, а подсистема контроля отношения и артикуляции (AACS) контролировала отношение, чтобы обеспечить приземление космического корабля в оптимальном азимуте для максимизации солнечной сбора и телекоммуникации с приземлением. [ 4 ] [ 1 ] [ 7 ]
Стандер был запущен с двумя гидразиновыми резервуарами, содержащими 64 килограмма топлива и под давлением с использованием гелия . Каждый сферический резервуар был расположен на нижней стороне посадки и предоставлялся топлива на этапах круиза и спуска. [ 4 ] [ 1 ] [ 7 ]
Коммуникации
[ редактировать ]Во время круизной сцены связь с космическим кораблем проводилась над x-полос с использованием антенны в форме средней формы, роговой антенны и избыточными усилителями мощности твердого состояния. Для мер на случай непредвиденных обстоятельств была также включена однонаправленная антенна с низким уровнем усиления. [ 4 ]
Первоначально Lander был предназначен для передачи данных через неудачный орбитатор MARS Climate через антенну UHF . Поскольку орбитаж проиграл 23 сентября 1999 года, Ландер по-прежнему сможет общаться непосредственно с сетью глубокого космоса через ссылку прямого на приземление (DTE), x-полоса, управляемая параболическая антенна со средней гейном колода. В качестве альтернативы, Mars Global Surveyor может использоваться в качестве реле с использованием антенны UHF в течение нескольких раз в каждый марсианский день. Однако сеть Deep Space может получать данные только от команд и не отправлять на Lander, используя этот метод. Антенна с прямым на приземление средней граней обеспечила возвратный канал 12,6 кбит/с и путь реле UHF предоставил обратный канал 128 кбит/с. Связь с космическим кораблем будет ограничена одночасовыми событиями, ограниченными тепловой площадкой, которые будут происходить в усилителях. Количество событий связи также будет ограничено ограничениями власти. [ 4 ] [ 6 ] [ 1 ] [ 7 ]
Власть
[ редактировать ]Круизная сцена включала в себя два галлиевого арсенида солнечных батареи для питания радиосистемы и поддерживать мощность в батареях в Ландере, что сохраняло определенную электронику в тепле. [ 4 ] [ 1 ]
Спустившись на поверхность, посадка должна была развернуть две 3,6-метровые солнечные батареи арсенида галлий, расположенные по обе стороны космического корабля. Еще два вспомогательные солнечные батареи были расположены на стороне, чтобы обеспечить дополнительную мощность в общей сложности в общей сложности 200 Вт и примерно от восьми до девяти часов работы в день. [ 4 ] [ 1 ]
В то время как солнце не было бы установлено под горизонтом во время первичной миссии, слишком мало света достигли бы солнечных батарей, чтобы оставаться достаточно теплыми, чтобы определенная электроника продолжала функционировать. Чтобы избежать этой проблемы, была включена 16-часовая батарея водородного водорода для перезарядки в течение дня и для питания нагревателя для теплового корпуса ночью. Это решение также ожидалось ограничить срок службы Ландера. Поскольку марсианские дни станут холоднее в конце лета, нагреватель будет поставлен слишком мало мощности, чтобы избежать замораживания, что приводит к тому, что батарея также замораживает и сигнализирует о конце рабочего срока службы для Ландера. [ 4 ] [ 1 ] [ 7 ]
Научные инструменты
[ редактировать ]-
 Марс происхождение
Марс происхождение -
 Стерео поверхностный образец
Стерео поверхностный образец -
 Лидар
Лидар -
 Роботизированная рука
Роботизированная рука -
 Роботизированная рука камера
Роботизированная рука камера -
 Метеорологический пакет
Метеорологический пакет -
 Тепловой и развитый газовый анализатор
Тепловой и развитый газовый анализатор -
 Марс микрофон
Марс микрофон








-
 Аннотированная диаграмма космического корабля Марса Поляра Ландера
Аннотированная диаграмма космического корабля Марса Поляра Ландера -
 Космический корабль в положении усаженной непосредственно перед инкапсуляцией
Космический корабль в положении усаженной непосредственно перед инкапсуляцией -
 Тестирование, выполненное на объекте сборки и инкапсуляции космического корабля
Тестирование, выполненное на объекте сборки и инкапсуляции космического корабля -
 Капсула въезда по Polar Lander , непосредственно перед тем, как быть установленной на Star 48 верхнюю ступень
Капсула въезда по Polar Lander , непосредственно перед тем, как быть установленной на Star 48 верхнюю ступень




- Mars Descent Imager (Mardi)
- Установленная до дна приземления, камера была предназначена для захвата 30 изображений, когда космический корабль спускался на поверхность. Приобретенные изображения будут использоваться для обеспечения географического и геологического контекста в зону посадки. [ 8 ]
- Поверхностный стереомагуст (SSI)
- Используя пару устройств, связанных с зарядом (CCDS), стерео панорамная камера была установлена на мачту высотой в одну метку и поможет в термическом анализаторе газового анализатора в определении интересующих областей для роботизированного рычага. Кроме того, камера будет использоваться для оценки плотности колонны атмосферной пыли, оптической глубины аэрозолей и наклонного количества колонны водяного пара с использованием узкополосной визуализации солнца. [ 9 ]
- Обнаружение света и эпоха (лидар)
- Лазерный звучащий инструмент был предназначен для обнаружения и характеристики аэрозолей в атмосфере на расстоянии до трех километров над приземлением. Инструмент работал в двух режимах: активный режим , используя прилагаемый лазерный диод и акустический режим, используя солнце в качестве источника света для датчика. В активном режиме лазерный эхолдер должен был излучать 100-наносекундные импульсы на длине волны 0,88-микрометром в атмосферу, а затем записывали продолжительность времени для обнаружения света, рассеянного аэрозолями. Продолжительность времени, необходимая для возврата света, может быть использована для определения численности льда, пыли и других аэрозолей в регионе. В акустическом режиме инструмент измеряет яркость неба, освещенную солнцем, и записывает рассеяние света, когда он переходит к датчику. [ 10 ]
- Роботизированная рука (RA)
- Расположенный на передней части Ландера, роботизированная рука представляла собой алюминиевую трубку длиной метр с локтевым соединением и сформулированным совками, прикрепленным к концу. Совок был предназначен для использования для копания в почве в непосредственной близости от Ландера. Затем почву можно было проанализировать в соке с роботизированной камерой рук или перенесена в тепловой газовый анализатор. [ 9 ]
- Роботизированная рука камера (RAC)
- Расположенная на роботизированной руке, камера, связанная с зарядкой, включала в себя два красных, двух зеленых и четырех синих ламп для освещения образцов почвы для анализа. [ 9 ]
- Метеорологический пакет (MET)
- Несколько инструментов, связанных с зондированием и записи погоды, были включены в упаковку. Ветер, температура, давление и датчики влажности были расположены на роботизированной руке и две развертываемые мачты: 1,2-метровая основная мачта , расположенная поверх посадки, и 0,9-метровая вторичная подмача , которая будет развернуться вниз, чтобы получить измерения близко к земля. [ 9 ]
- Тепловой и развитый газовый анализатор (TEGA)
- Инструмент был предназначен для измерения численности воды, водяного льда, адсорбированного углекислого газа, кислорода и летучих несущих минералов в образцах поверхности и подземных почв, собранных и перенесенных роботизированным рычагом. Материалы, помещенные на решетку внутри одного из восьми печи, будут нагреваться и испаряться при 1000 ° C. Затем развитый газовый анализатор будет записывать измерения, используя спектрометр и электрохимическую ячейку. Для калибровки пустая печь также будет нагреть во время этого процесса для дифференциальной сканирующей калориметрии . Разница в энергии, необходимой для нагрева каждой духовки, будет указывать концентрации водного льда и других минералов, содержащих воду или диоксид углерода. [ 9 ]
- Марс микрофон
- Микрофон должен был стать первым инструментом, который записывает звуки на другой планете. В первую очередь состоит из микрофона, обычно используемого со слуховыми аппаратами , инструмент должен был записывать звуки духовой пыли, электрических разрядов и звуков эксплуатационного космического корабля в 2,6 секунды или 10,6 секунды 12-битных образцов. [ 11 ] Микрофон был построен с использованием готовых деталей, включая интегрированную схему Sensory, Inc. RSC-164, обычно используемая в устройствах распознавания речи. [ 12 ]
Профиль миссии
[ редактировать ]| Временная шкала наблюдений | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||
Запуск и траектория
[ редактировать ]Mars Polar Lander был запущен 3 января 1999 года, в 20:21:10 UTC Национальным управлением аэронавтики и космического пространства из комплекса Space Launch 17B на станции ВВС Кейп -Канаверал во Флориде, на борту стартового транспортного средства Delta II 7425–9,5. Полная последовательность ожогов длилась в течение 47,7 минут после того, как третьей стадии Тиокола бустер третьей стадии поместил космический корабль в 11-месячную траекторию переноса Марса с окончательной скоростью 6,884 километра в секунду с Марсом. Во время круиза космический корабль был уложен в капсуле Aeroshell , а сегмент, известный как круизная сцена, обеспечивал власть и связь с Землей. [ 4 ] [ 6 ] [ 1 ]
-
 Схема конфигурации запуска.
Схема конфигурации запуска. -
 Запустить фото Марса Поляра Ландера на борту стартового носителя Delta II.
Запустить фото Марса Поляра Ландера на борту стартового носителя Delta II. -
 Диаграмма межпланетной траектории Mars Polar Lander.
Диаграмма межпланетной траектории Mars Polar Lander.



Посадочная зона
[ редактировать ]Целевая зона посадки представляла собой область вблизи Южного полюса Марса, называемого Ультими Спопули , потому что в ней было большое количество купопели ( лобат или нерегулярные скальпы ). [ Цитация необходима ]
Попытка посадки
[ редактировать ]


3 декабря 1999 года Марс Поляр Ландер прибыл на Марс, и операторы миссии начали подготовку к посадке. В 14:39:00 UTC круизная сцена была отброшена, которая начала запланированное общение, чтобы продолжиться до тех пор, пока космический корабль не коснулся на поверхности. За шесть минут до входа атмосферы запрограммированное 80-секундное стрельба побуждения перевернуло космический корабль к соответствующей ориентации входа, при этом тепловой экранинг расположен для поглощения тепла 1650 ° C, которое будет генерироваться, когда капсула спуска проходила через атмосферу.
Путешествуя со скоростью 6,9 километра в секунду, капсула входа вошла в марсианскую атмосферу в 20:10:00 UTC, и ожидали, что приземлится поблизости 76 ° S 195 ° W / 76 ° S 195 ° W в регионе, известном как Планам Австралия . После посадки было ожидается восстановление общения в течение 20:39:00 UTC. Однако общение не было восстановлено, и Ландер был объявлен потерянным. [ 4 ] [ 6 ] [ 1 ]
25 мая 2008 года Феникс Ландер прибыл на Марс, и впоследствии выполнил большинство целей полярного Ландера Марса , неся несколько тех же или производных инструментов.

 Нажатие на клика: нажатие на этикетки откроют новую статью.
Нажатие на клика: нажатие на этикетки откроют новую статью. Предполагаемые операции
[ редактировать ]Путешествуя примерно на 6,9 километра/секунду и 125 километров над поверхностью, космический корабль вошел в атмосферу и первоначально был замедлен с использованием 2,4 -метрового абляционного теплового экрана , расположенного на дне входного тела, для аэробки через 116 километров атмосферы. Через три минуты после входа космический корабль замедлился до 496 метров в секунду, сигнализирующей 8,4-метровую полиэфирное парашют для развертывания из раствора, следовавшего сразу же разделением теплового экрана и питанием Mardi, в то время как на 8,8 километра над поверхностью. Парашют дополнительно замедлил скорость космического корабля до 85 метров в секунду, когда земля радара начал отслеживать функции поверхности, чтобы обнаружить наилучшее местоположение посадки и определить вертикальную скорость с помощью эффекта доплеровского контроля.
Когда космический корабль замедлился до 80 метров в секунду, через минуту после развертывания парашюта, посадка отделился от защиты и начал спуск с мощным спусканием на уровне 1,3 километра на вершине. Вертикальная скорость была предназначена для падения до 2,4 метра в секунду на высоте 12 м, а затем была постоянной до приземления. Ниже 40 метров радар станет ненадежным благодаря поднятой пыли и был отключен уже на этой высоте - в последние секунды тяга будет контролироваться инерционными датчиками. Функция, которая сразу же выключила тягу при приземлении, также была вооружена на уровне 40 метров. Приземление ожидалось в 20:01 UTC, дано как 20:15 ″ Time, получившее землю ». [ 4 ] [ 6 ] [ 1 ] [ 7 ]
Операции Lander должны были начаться через пять минут после приземления, сначала разворачивая усаженные солнечные батареи, а затем ориентируя антенну с прямым и прямым приземлением, чтобы обеспечить первое общение с сетью глубокого пространства . 45-минутная передача должна была транслироваться на Землю, содержащую 30 изображений приземления, полученных Марди. Прибытие этого сигнала успешной посадки ожидалось в 20:39 UTC. Затем посадочный посадок будет питаться в течение шести часов, чтобы батареи заряжались. В последующие дни инструменты космического корабля будут проверены операторами, и научные эксперименты должны были начаться 7 декабря и последнее, по крайней мере, для следующих 90 марсианских соль , с возможностью расширенной миссии. [ 4 ] [ 6 ] [ 1 ] [ 7 ]
Потеря связи
[ редактировать ]3 декабря 1999 года, в 14:39:00 UTC, была отправлена последняя телеметрия от Mars Polar Lander , непосредственно перед разделением круизной сцены и последующей атмосферной записи. Никаких дальнейших сигналов не было получено от космического корабля. Попытки были предприняты Глобальным геодезистом Марса сфотографировать область, в которой считался Ландер. Объект был виден и, как считается, был посадочным. Однако последующая визуализация в сентябре 2005 года привела к исключению идентифицированного объекта. Марс Полярный Ландер остается потерянным. [ 13 ] [ 14 ]
Причина потери связи неизвестна. Тем не менее, Правление по рассмотрению сбоев пришла к выводу, что наиболее вероятной причиной неудачи была программная ошибка, которая неправильно определила вибрации, вызванные развертыванием утихленных ног, как приземление поверхности. [ 15 ] Получившимся действием космического корабля стало закрытие двигателей спуска, в то время как, вероятно, на 40 метров над поверхностью. Хотя было известно, что развертывание ног может создать ложную индикацию, инструкции по проектированию программного обеспечения не учитывали эту возможность. [ 16 ]
В дополнение к преждевременному закрытию двигателей спуска, Совет по рассмотрению сбоев также оценил другие потенциальные способы сбоя. [ 2 ] Отсутствие существенных доказательств для способа отказа, следующие возможности не могли быть исключены:
- Условия поверхности превышают возможности для посадки;
- потеря контроля из -за динамических эффектов;
- посадочная площадка не выживаем;
- Backshell/Parachute Contacts Lander;
- потеря контроля из-за смещения центров; или
- Тепловоелее не удалось из -за удара микрометеороидов .
Недостаток Mars Polar Lander произошел через два с половиной месяца после потери климатического орбитального оператора Марса . Неадекватное финансирование и плохое управление были названы основными причинами неудач. [ 17 ] По словам Томаса Янга, председателя Независимой оценки программы MARS, программа «финансировалась не менее 30%». [ 18 ]
| Цитируется из отчета [ 2 ] |
|---|
|
"Магнитный датчик предоставляется в каждой из трех посадочных ног, чтобы ощутить приземление, когда приземление связывается с поверхностью, инициируя закрытие двигателей спуска. Тесты показали, что подводное указание на приземление происходит в датчике приземления зала во время развертывания высадки (в то время как посадка подключена к парашюту). датчик. как действительный. Программное обеспечение, предназначенное для игнорирования показаний приземления до включения логики зондирования приземления, не было должным образом реализовано, и было сохранено ложное показание приземления. Логика зондирования приземления включена на высоте 40 метров, и программное обеспечение выпустило бы заканчивающее усилие движения двигателя в настоящее время в ответ на (ложную) индикацию приземления. На высоте 40 метров, посадочный, со скоростью приблизительно 13 метров в секунду, что при отсутствии тяги ускоряется в результате гравитации Марса до скорости удара поверхности приблизительно 22 метра в секунду (номинальная скорость приземления составляет 2,4 метра на один второй). При этой скорости воздействия Ландер не мог выжить ». |
Последствия
[ редактировать ]Несмотря на неудачу Марса Полярного Ландера, Планам Австралия , которая служила целью разведки для Ландера и двух зондов Deep Space 2 , [ 19 ] в последующие годы будет изучена Марсис -радар Европейского космического агентства, который изучал и проанализировал сайт с орбиты Марса. [ 20 ] [ 21 ] [ 22 ] [ 23 ]
Смотрите также
[ редактировать ]- Mars Surveyor 2001 Lander , аналогичный дизайн Lander, миссия отменена. Ландер используется для Феникса.
- Феникс Ландер , 2008
- Исследование Марса
- Exomars Rover
- Список миссий на Марс
- Mars Science Laboratory Rover
Ссылки
[ редактировать ]- ^ Jump up to: а беременный в дюймовый и фон глин час я Дж k л м «Марс Полярный Ландер» . nssdc.gsfc.nasa.gov . НАСА . Получено 1 декабря 2022 года .
- ^ Jump up to: а беременный в «Сообщите о потере миссий Mars Polar Lander и Deep Space 2 » (PDF) . НАСА / JPL . 22 марта 2000 года. Архивировано из оригинала (PDF) 16 марта 2011 года.
- ^ Jump up to: а беременный «Марс Полярный Ландер Миссия стоит» . Ассошиэйтед Пресс . 8 декабря 1999 года. Архивировано с оригинала 17 февраля 2022 года . Получено 30 сентября 2020 года .
- ^ Jump up to: а беременный в дюймовый и фон глин час я Дж k л м не «Миссии Марса 1998 года» (PDF) (пресс -релиз). НАСА / JPL . Декабрь 1998 года. Архивировано из оригинала (пресс -комплект) 30 апреля 2020 года . Получено 12 марта 2011 года .
- ^ Бен Хух (3 марта 1998 г.). «Имена детей идут на Марс» . Sun Sentinel . Архивировано с оригинала 2 декабря 2013 года . Получено 30 мая 2013 года .
- ^ Jump up to: а беременный в дюймовый и фон "Mars Polar Lander/Deep Space 2" (PDF) (пресс -релиз). НАСА / JPL . Декабрь 1999 года. Архивировано из оригинала (пресс -комплект) 23 декабря 2016 года . Получено 12 марта 2011 года .
- ^ Jump up to: а беременный в дюймовый и фон глин «Mars Polar Lander / Deep Space 2 - NASA Science» . Science.nasa.gov . НАСА . Получено 12 марта 2011 года .
- ^ "Mars Polar Lander: Mars Descent Imager (Mardi)" . nssdc.gsfc.nasa.gov . НАСА . Получено 17 марта 2011 года .
- ^ Jump up to: а беременный в дюймовый и «Mars Polar Lander: Mars volatiles и климат -геодезист (MVAC)» . nssdc.gsfc.nasa.gov . НАСА . Получено 17 марта 2011 года .
- ^ «Mars Polar Lander: обнаружение света и дальности (лидар)» . nssdc.gsfc.nasa.gov . НАСА . Получено 17 марта 2011 года .
- ^ "Mars Polar Lander: Mars Microphone" . nssdc.gsfc.nasa.gov . НАСА . Получено 17 марта 2011 года .
- ^ «Проекты: планетарные микрофоны - микрофон Марса» . Планетарное общество . Архивировано из оригинала 18 августа 2006 года.
- ^ "Марс Полярный Ландер наконец -то нашел?" Полем Sky & Telescope . 6 мая 2005 года. Архивировано из оригинала 23 июля 2008 года . Получено 22 апреля 2009 года .
- ^ «Марс Полярный Ландер не найден» . www.msss.com . НАСА / JPL . 17 октября 2005 г. MGS-MOC2-1253. Архивировано из оригинала 7 декабря 2008 года . Получено 22 апреля 2009 года .
- ^ НАСА 3: Провалы миссии на YouTube
- ^ Нэнси Г. Левесон (июль 2004 г.). «Роль программного обеспечения в недавних аэрокосмических авариях» (PDF) . Журнал космических кораблей и ракетов . 41 (4). doi : 10.2514/1.11950 .
- ^ Томас Янг (13 марта 2000 г.). Отчет об отделении команды по программе MARS Независимая оценка (отчет). Проект № 7. Комитет по науке и технологиям Палаты представителей . Получено 22 апреля 2009 года .
{{cite report}}: Cs1 maint: url-status ( ссылка ) - ^ Джеффри Кэй (14 апреля 2000 г.). «НАСА в горячем сиденье» . Newshour с Джимом Лерером . Пбс . Архивировано из оригинала (стенограмма) 26 декабря 2013 года . Получено 22 апреля 2009 года .
- ^ Бен Эванс (6 января 2019 г.). « Не мог бы выжить»: 20 лет с тех пор, как злополучный Марс Полярный Ландер из НАСА » . Америкаспас . Получено 15 апреля 2022 года .
- ^ R. orosei; SE Laurro; Э. Петтинелли; А. Читетти; М. Корадини; и др. (25 июля 2018 г.). «Радарные доказательства субледниковой жидкой воды на Марсе» . Наука . 361 (6401): 490–493. Arxiv : 2004.04587 . Bibcode : 2018sci ... 361..490o . doi : 10.1126/science.aar7268 . HDL : 11573/1148029 . PMID 30045881 .
- ^ Кеннет Чанг; Деннис Оверби (25 июля 2018 г.). «Водянистое озеро обнаруживается на Марсе, что повышает потенциал для инопланетной жизни» . New York Times . Получено 15 апреля 2022 года .
- ^ «Огромный резервуар жидкой воды, обнаруженного под поверхностью Марса» . Эврикалерт . 25 июля 2018 года . Получено 15 апреля 2022 года .
- ^ Мэри Халтон (25 июля 2018 г.). «Жидкая вода» озеро »раскрыто на Марсе» . BBC News . Получено 15 апреля 2022 года .
Дальнейшее чтение
[ редактировать ]- Майкл С. Малин (июль 2005 г.). «Скрыто на виду: поиск марсианских посадков». Небо и телескоп . 110 (7): 42–46. Bibcode : 2005s & t ... 110a..42m . ISSN 0037-6604 .


