Любопытство (ровер)
| Любопытство | |
|---|---|
| Часть Марсианской научной лаборатории | |
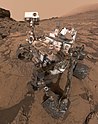
 Автопортрет Curiosity . у подножия горы Шарп в октябре 2015 года | |
| Тип | Марсоход |
| Владелец | НАСА |
| Производитель | Лаборатория реактивного движения |
| Технические характеристики | |
| Размеры | 2,9 м × 2,7 м × 2,2 м (9 футов 6 дюймов × 8 футов 10 дюймов × 7 футов 3 дюйма) |
| Сухая масса | 899 кг (1982 фунта) |
| Коммуникация |
|
| Власть | ММРТГ : ~100 Вт (0,13 л.с.) |
| Ракета | Atlas V 541 |
| Инструменты | |
| История | |
| Запущен |
|
| Развернуто |
|
| Расположение | Кратер Гейла , Марс |
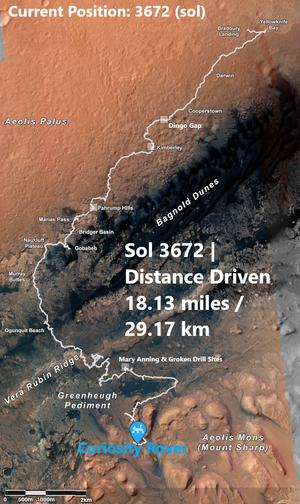
| Путешествовал | 31,99 км (19,88 миль) на Марсе по состоянию на 24 июня 2024 г. [update][1] |
| НАСА Марсоходы | |
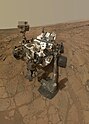
Curiosity размером с автомобиль, — марсоход исследующий кратер Гейла и гору Шарп на Марсе в рамках НАСА миссии Марсианской научной лаборатории (MSL). [2] Curiosity был запущен с мыса Канаверал (CCAFS) 26 ноября 2011 года в 15:02:00 UTC и приземлился на Эолис Палус внутри кратера Гейла на Марсе 6 августа 2012 года в 05:17:57 UTC. [3] [4] [5] Место посадки Брэдбери находилось менее чем в 2,4 км (1,5 мили) от центра цели приземления марсохода после путешествия длиной 560 миллионов км (350 миллионов миль). [6] [7]
миссии Цели включают исследование марсианского климата и геологии , оценку того, предлагала ли когда-либо выбранная полевая площадка внутри Гейла экологические условия, благоприятные для микробной жизни (включая исследование роли воды ), а также обитаемости планеты исследования в рамках подготовки к исследованию человеком . [8] [9]
В декабре 2012 года миссия Curiosity двухлетняя была продлена на неопределенный срок. [10] а 5 августа 2017 года НАСА отпраздновало пятую годовщину приземления марсохода Curiosity . [11] [12] 6 августа 2022 года был опубликован подробный обзор достижений марсохода Curiosity за последние десять лет. [13] Ровер все еще работает, и по состоянию на 30 июня 2024 года Curiosity был активен на Марсе в течение 4230 солов (всего 4346 дней ; 11 лет, 329 дней ) с момента его приземления (см. Текущий статус ).
Марсианская научная лаборатория НАСА/Лаборатории реактивного движения/ Curiosity команда проекта была награждена Трофеем Роберта Дж. Кольера 2012 года Национальной ассоциацией аэронавтики «В знак признания выдающихся достижений в успешной посадке Curiosity на Марс, развития технологических и инженерных возможностей страны и значительного улучшения понимание человечеством древней обитаемой среды Марса». [14] Curiosity Конструкция марсохода послужит основой для НАСА «Настойчивость» миссии 2021 года , которая будет оснащена различными научными инструментами.
Миссия [ править ]
Цели и задачи [ править ]
Как установлено Программой исследования Марса , основные научные цели миссии MSL заключаются в том, чтобы помочь определить, могла ли когда-либо на Марсе существовать жизнь , а также определить роль воды и изучить климат и геологию Марса . [8] [9] Результаты миссии также помогут подготовиться к исследованию человеком. [9] Для достижения этих целей MSL ставит перед собой восемь основных научных задач: [15]
- Биологический
- Определить природу и количество органических соединений углерода.
- Изучите химические строительные блоки жизни (углерод, водород, азот, кислород, фосфор и сера ).
- Определить особенности, которые могут отражать эффекты биологических процессов ( биосигнатуры и биомолекулы ).
- Геолого-геохимический
- Исследовать химический, изотопный и минералогический состав марсианской поверхности и приповерхностных геологических материалов.
- Интерпретировать процессы, которые сформировали и изменили горные породы и почвы.
- Планетарный процесс
- Оценить долговременные (т. е. 4 миллиарда лет) марсианской атмосферы. процессы эволюции
- Определить современное состояние, распределение и круговорот воды и углекислого газа.
- Поверхностное излучение
- Охарактеризуйте широкий спектр поверхностного излучения, включая галактическое и космическое излучение , солнечные протонные события и вторичные нейтроны . В рамках исследования он также измерил радиационное воздействие внутри космического корабля, направлявшегося на Марс, и продолжает измерения радиации во время исследования поверхности Марса. Эти данные будут важны для будущей миссии с экипажем . [16]
Примерно через год после начала миссии на поверхность и после оценки того, что древний Марс мог быть пригоден для микробной жизни, цели миссии MSL превратились в разработку прогнозирующих моделей процесса сохранения органических соединений и биомолекул ; раздел палеонтологии, называемый тафономией . [17] Регион, который он собирается исследовать, сравнивают с регионом Четырех Углов на западе Северной Америки . [18]
Имя [ править ]
Комиссия НАСА выбрала название Curiosity после общенационального студенческого конкурса, на который было подано более 9000 предложений через Интернет и по почте. ученица шестого класса из Канзаса , 12-летняя Клара Ма из начальной школы «Подсолнух» в Ленексе, штат Канзас Победившую работу представила . В качестве приза Ма выиграла поездку в НАСА Лабораторию реактивного движения (JPL) в Пасадене, Калифорния , где она подписала свое имя прямо на марсоходе во время его сборки. [19]
Ма написала в своем победном эссе:
Любопытство — это вечный огонь, который горит в сознании каждого. Это заставляет меня вставать утром с постели и задаваться вопросом, какие сюрпризы преподнесет мне жизнь в этот день. Любопытство – такая мощная сила. Без этого мы не были бы теми, кем мы являемся сегодня. Любопытство — это страсть, которая движет нами в повседневной жизни. Мы стали исследователями и учеными с нашей потребностью задавать вопросы и удивляться. [19]
Стоимость [ править ]
С поправкой на инфляцию, Curiosity стоимость жизненного цикла составит 3,2 миллиарда долларов США в долларах 2020 года. Для сравнения, Perseverance 2021 года составляет 2,9 миллиарда долларов США. стоимость жизненного цикла марсохода [20]
Технические характеристики вездехода и посадочного модуля [ править ]

Curiosity имеет длину 2,9 м (9 футов 6 дюймов), ширину 2,7 м (8 футов 10 дюймов) и высоту 2,2 м (7 футов 3 дюйма). [21] больше, чем марсоходы Mars Exploration Rover, длина которых составляет 1,5 м (4 фута 11 дюймов), а масса - 174 кг (384 фунта), включая 6,8 кг (15 фунтов) научных инструментов. [22] [23] [24] По сравнению с Pancam на марсоходах, MastCam-34 имеет пространственное разрешение в 1,25 раза выше , а пространственное разрешение MastCam-100 — в 3,67 раза выше. [25]
«Кьюриосити» имеет на Марсе современное . научное оборудование [26] Это четвертый роботизированный вездеход НАСА, отправленный на Марс с 1996 года. Предыдущими успешными марсоходами являются Sojourner из миссии Mars Pathfinder (1997), а также марсоходы Spirit (2004–2010) и Opportunity (2004–2018) из миссии Mars Exploration Rover .
На момент запуска Curiosity составлял 23% массы космического корабля массой 3893 кг (8583 фунта). Оставшаяся масса была выброшена в процессе транспортировки и посадки.
- Размеры : Curiosity составляет 899 кг (1982 фунта), включая 80 кг (180 фунтов) научных инструментов. масса [22] Ровер имеет длину 2,9 м (9 футов 6 дюймов), ширину 2,7 м (8 футов 10 дюймов) и высоту 2,2 м (7 футов 3 дюйма). [21]
Основное коробчатое шасси образует Warm Electronics Box (WEB). [27] : 52

- Источник энергии : Curiosity питается от радиоизотопного термоэлектрического генератора (РТГ), как и успешные «Викинг-1» и «Викинг-2» в 1976 году. марсианские аппараты [28] [29]
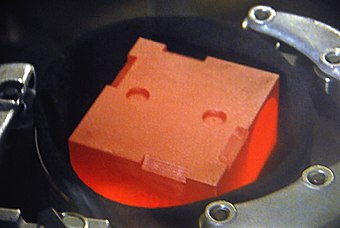
- Радиоизотопные энергетические системы (РЭС) — это генераторы, которые производят электроэнергию в результате распада радиоактивных изотопов , таких как плутоний-238 , который является неделящимся изотопом плутония. Тепло, выделяемое при распаде этого изотопа, генерирует электроэнергию с помощью термопар , обеспечивая постоянную мощность в любое время года, днем и ночью. Отходящее тепло также используется по трубам для обогрева систем, освобождая электроэнергию для работы автомобиля и приборов. [28] [29] питается РИТЭГ Curiosity 4,8 кг (11 фунтов) диоксида плутония-238, поставляемого Министерством энергетики США . [30]
- Curiosity RTG — это многоцелевой радиоизотопный термоэлектрический генератор (MMRTG), спроектированный и изготовленный компаниями Rocketdyne и Teledyne Energy Systems по контракту с Министерством энергетики США . [31] и заправлен и испытан Национальной лабораторией Айдахо . [32] Основанный на устаревшей технологии RTG, он представляет собой более гибкий и компактный этап разработки. [33] и рассчитан на выработку 110 Вт электрической энергии и около 2000 Вт тепловой энергии в начале миссии. [28] [29] MMRTG со временем производит меньше энергии по мере распада плутониевого топлива: при минимальном сроке службы в 14 лет выходная электрическая мощность снижается до 100 Вт. [34] [35] Источник энергии генерирует 9 МДж (2,5 кВтч) электрической энергии каждый день, что намного больше, чем солнечные панели уже вышедших из эксплуатации марсоходов , которые генерируют около 2,1 МДж (0,58 кВтч) каждый день. Электрический выход MMRTG заряжает две перезаряжаемые литий-ионные батареи . Это позволяет подсистеме питания удовлетворять пиковую мощность, необходимую для работы марсохода, когда потребность временно превышает устойчивый уровень выходной мощности генератора. Емкость каждой батареи составляет около 42 ампер-часов .
- Система отвода тепла : температура на месте посадки меняется в зависимости от сезона, и тепловая система обогревает марсоход по мере необходимости. Тепловая система делает это несколькими способами: пассивно, посредством рассеивания тепла на внутренние компоненты; электрическими нагревателями, стратегически расположенными на ключевых компонентах; и с помощью системы отвода тепла марсохода (HRS). [27] В нем используется жидкость, прокачиваемая через 60 м (200 футов) трубок в корпусе марсохода, чтобы чувствительные компоненты поддерживались при оптимальных температурах. [36] Жидкостный контур служит дополнительной цели по отводу тепла, когда марсоход становится слишком горячим, а также может собирать отходящее тепло от источника энергии, прокачивая жидкость через два теплообменника, которые установлены рядом с РИТЭГ. HRS также имеет возможность охлаждать компоненты при необходимости. [36]
- Компьютеры : два идентичных бортовых компьютера вездехода, называемые Rover Compute Element (RCE), содержат радиационно-стойкую память, позволяющую выдерживать экстремальное космическое излучение и защищать от циклических отключений питания. На компьютерах установлена VxWorks операционная система реального времени (RTOS). Память каждого компьютера включает 256 килобайт (КБ) EEPROM , 256 мегабайт (МБ) динамической оперативной памяти (DRAM) и 2 гигабайта (ГБ) флэш-памяти . [37] Для сравнения, марсоходы использовали 3 МБ EEPROM, 128 МБ DRAM и 256 МБ флэш-памяти. [38]
- Компьютеры RCE используют (ЦП) RAD750 центральный процессор , который является преемником процессора RAD6000 марсоходов. [39] [40] Процессор IBM RAD750, радиационно-стойкая версия PowerPC 750 , может выполнять до 400 миллионов инструкций в секунду (MIPS), тогда как процессор RAD6000 способен выполнять только 35 MIPS. [41] [42] Из двух бортовых компьютеров один настроен как резервный и возьмет на себя управление в случае возникновения проблем с основным компьютером. [37] 28 февраля 2013 года НАСА было вынуждено переключиться на резервный компьютер из-за проблемы с флэш-памятью активного компьютера, в результате чего компьютер постоянно перезагружался в цикле. Резервный компьютер был включен в безопасном режиме и впоследствии вернулся в активное состояние 4 марта 2013 г. [43] Та же проблема произошла в конце марта, а полноценная работа возобновилась 25 марта 2013 года. [44]
- Ровер оснащен инерциальным измерительным блоком (IMU), который предоставляет трехосную информацию о своем положении, которая используется в навигации ровера. [37] Компьютеры марсохода постоянно контролируют работу марсохода, например, регулируя его температуру. [37] Такие действия, как фотографирование, вождение и работа с инструментами, выполняются в виде последовательности команд, которая отправляется от летной команды на марсоход. [37] После приземления на марсоход было установлено программное обеспечение для работы на всей поверхности, поскольку на его компьютерах не было достаточной оперативной памяти во время полета. Новое программное обеспечение по сути заменило летное программное обеспечение. [7]
- Ровер имеет четыре процессора. Одним из них является SPARC процессор , который управляет двигателями марсохода и спускаемой ступени во время его спуска через марсианскую атмосферу . Два других — это процессоры PowerPC : основной процессор, который выполняет почти все наземные функции марсохода, и резервный процессор. Четвертый, еще один процессор SPARC , управляет движением марсохода и является частью его блока контроллера двигателя . Все четыре процессора одноядерные . [45]
Связь [ править ]
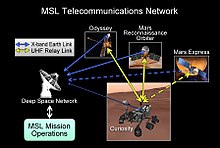
- Связь : Curiosity оснащен значительной резервной телекоммуникационной связью за счет нескольких средств: X-диапазона передатчика и приемника , которые могут напрямую связываться с Землей, а также сверхвысокочастотного (УВЧ) Electra-Lite программно-определяемого радиомодуля для связи с орбитальными аппаратами Марса. [27] Связь с орбитальными аппаратами является основным путем возврата данных на Землю, поскольку орбитальные аппараты имеют большую мощность и антенны большего размера, чем посадочный модуль, что обеспечивает более высокую скорость передачи. [27] Телекоммуникации включали небольшой транспондер для дальнего космоса на ступени спуска и полупроводниковый усилитель мощности на марсоходе для X-диапазона . Ровер также оснащен двумя радиостанциями УВЧ. [27] сигналы которых орбитальные спутники-ретрансляторы способны передавать обратно на Землю. Сигналы между Землей и Марсом занимают в среднем 14 минут 6 секунд. [46] Curiosity может напрямую связываться с Землей на скорости до 32 кбит/с, но основная часть данных передается через орбитальный аппарат Mars Reconnaissance Orbiter и орбитальный аппарат Odyssey . Скорость передачи данных между Curiosity и каждым орбитальным аппаратом может достигать 2000 кбит/с и 256 кбит/с соответственно, но каждый орбитальный аппарат способен общаться с Curiosity всего около восьми минут в день (0,56% времени). [47] Связь с Curiosity космических данных и с ним осуществляется на основе согласованных на международном уровне протоколов передачи , определенных Консультативным комитетом по системам космических данных . [48]
- Лаборатория реактивного движения (JPL) — это центральный центр распространения данных, откуда выбранные информационные продукты по мере необходимости передаются на удаленные научные объекты. JPL также является центральным узлом процесса восходящей связи, хотя участники распределяются по своим базовым учреждениям. [27] При приземлении телеметрия контролировалась тремя орбитальными аппаратами, в зависимости от их динамического местоположения: Mars Odyssey 2001 года , Mars Reconnaissance Orbiter ЕКА и спутником Mars Express . [49] По состоянию на февраль 2019 года орбитальный аппарат MAVEN позиционируется как орбитальный аппарат-ретранслятор, продолжая при этом свою научную миссию. [50]
Системы мобильности [ править ]

- Системы мобильности : Curiosity оснащен шестью колесами диаметром 50 см (20 дюймов) с качающейся тележкой . Это масштабированные версии тех, которые используются на марсоходах (MER). [27] Система подвески также служила шасси для машины, в отличие от ее меньших предшественников. [51] [52] Каждое колесо имеет шипы и независимо приводится в действие и приводится в движение, что позволяет преодолевать подъемы по мягкому песку и карабкаться по камням. Каждое переднее и заднее колесо может управляться независимо, что позволяет автомобилю поворачивать на месте, а также выполнять дуговые повороты. [27] Каждое колесо имеет рисунок, который помогает ему сохранять сцепление с дорогой, но при этом оставляет узорчатые следы на песчаной поверхности Марса. Этот шаблон используется бортовыми камерами для оценки пройденного расстояния. Сам шаблон представляет собой азбуку Морзе для «JPL» (·--- ·--· ·-··). [53] Ровер способен преодолевать песчаные дюны с уклоном до 12,5°. [54] Судя по центру масс , аппарат может выдерживать наклон не менее 50° в любом направлении без опрокидывания, однако автоматические датчики ограничивают наклон марсохода более чем на 30°. [27] После шести лет эксплуатации колеса заметно изношены, имеют проколы и потертости. [55]
- Curiosity может преодолевать препятствия высотой около 65 см (26 дюймов). [26] и его дорожный просвет составляет 60 см (24 дюйма). [56] На основе таких переменных, как уровни мощности, сложность местности, проскальзывание и видимость, максимальная скорость перемещения по местности оценивается в 200 м (660 футов) в день при автоматической навигации. [26] Ровер приземлился примерно в 10 км (6,2 мили) от подножия горы Шарп . [57] (официальное название Aeolis Mons ), и ожидается, что за время своей основной двухлетней миссии он пройдет минимум 19 км (12 миль). [58] Он может двигаться со скоростью до 90 м (300 футов) в час, но средняя скорость составляет около 30 м (98 футов) в час. [58] Транспортным средством «управляют» несколько операторов во главе с Ванди Вермой , руководителем группы автономных систем, мобильности и робототехнических систем в JPL. [59] [60] который также является соавтором языка PLEXIL, используемого для управления марсоходом. [61] [62] [63]
Посадка [ править ]
«Кьюриосити» приземлился в квадрате 51 (по прозвищу Йеллоунайф ) Эолиды Палуса в кратере Гейла. [64] [65] [66] [67] Координаты места посадки:
4 ° 35'22 "ю.ш., 137 ° 26'30" в.д. / 4,5895 ° ю.ш., 137,4417 ° в.д. . [68] [69] это место было названо Брэдбери-Лендинг 22 августа 2012 года в честь писателя-фантаста Рэя Брэдбери . [6] Предполагается, что ударный кратер Гейл возрастом от 3,5 до 3,8 миллиардов лет сначала был постепенно заполнен отложениями ; сначала отложенный водой, а затем ветром, возможно, до тех пор, пока он не был полностью покрыт. Затем ветровая эрозия размыла отложения, оставив изолированную гору Эолис Монс («Гора Шарп») высотой 5,5 км (3,4 мили) в центре кратера шириной 154 км (96 миль). Таким образом, считается, что у марсохода может появиться возможность изучить два миллиарда лет марсианской истории в отложениях, обнаженных в горе. Кроме того, место его посадки находится рядом с аллювиальным конусом , который, как предполагается, является результатом потока грунтовых вод либо до отложения эродированных отложений, либо в относительно недавней геологической истории. [70] [71] WikiMiniAtlas
WikiMiniAtlasот 20 000 до 40 000 термостойких бактериальных спор находилось По данным НАСА, при запуске Curiosity , и в 1000 раз больше этого числа, возможно, не было подсчитано. [72]

Система посадки марсохода [ править ]
НАСА Предыдущие марсоходы активизировались только после успешного входа, спуска и приземления на поверхность Марса. Curiosity , с другой стороны, был активен, когда приземлился на поверхность Марса, используя систему подвески марсохода для окончательной посадки. [73]
Curiosity перешел из походной полетной конфигурации в посадочную, в то время как космический корабль MSL одновременно опустил его под спускаемую ступень космического корабля с помощью троса длиной 20 м (66 футов) от системы « небесного крана » до мягкой посадки — колеса вниз — на поверхность. Марса. [74] [75] [76] [77] После приземления марсоход подождал 2 секунды, чтобы подтвердить, что он находится на твердой земле, а затем выпустил несколько пиротехнических застежек, активировав кусачки на уздечке, чтобы освободиться от ступени спуска космического корабля. Затем спускаемая ступень улетела на аварийную посадку, и марсоход приготовился приступить к научной части миссии. [78]
Статус путешествия [ править ]
По состоянию на 9 декабря 2020 года марсоход находился на расстоянии 23,32 км (14,49 миль) от места приземления. [79] По состоянию на 17 апреля 2020 года марсоход проехал менее 800 из 2736 солов (марсианских дней). К 30 мая 2023 года марсоход пролетел 30,00 км (18,64 мили) от места приземления.
Дублировать [ править ]


У Curiosity есть два полноразмерных испытательных стенда транспортных систем (VSTB), марсоход-близнец, используемый для тестирования и решения проблем, марсоход MAGGIE (Марсианская автоматизированная гигантская штуковина для комплексного проектирования) с компьютерным мозгом и марсоход Scarecrow без компьютерного мозга. Они размещены на Марсовой верфи Лаборатории реактивного движения для решения проблем на моделируемой поверхности Марса. [80] [81]
Научные инструменты [ править ]

Общая стратегия анализа проб начинается с использования камер высокого разрешения для поиска интересующих особенностей. Если какая-то конкретная поверхность представляет интерес, Curiosity может испарить небольшую ее часть с помощью инфракрасного лазера и изучить полученный спектр, чтобы узнать элементный состав породы. Если эта подпись интригует, марсоход использует свою длинную руку, чтобы раскачиваться над микроскопом и рентгеновским спектрометром, чтобы рассмотреть объект поближе. Если образец требует дальнейшего анализа, Curiosity может просверлить валун и доставить порошкообразный образец либо в отдел анализа проб на Марсе (SAM), либо в аналитические лаборатории CheMin внутри марсохода. [82] [83] [84]
Камеры MastCam, Mars Hand Lens Imager (MAHLI) и Mars Descent Imager (MARDI) были разработаны компанией Malin Space Science Systems , и все они имеют общие конструктивные компоненты, такие как встроенные блоки цифровой обработки изображений , 1600 × 1200 с зарядовой связью. устройство (CCD) и шаблонный фильтр RGB Байера . [85] [86] [87] [88] [25] [89]
Всего на марсоходе установлено 17 камер: HazCams (8), NavCams (4), MastCams (2), MAHLI (1), MARDI (1) и ChemCam (1). [90]
Мачтовая камера (MastCam) [ править ]

Система MastCam обеспечивает получение изображений нескольких спектров и полноцветных изображений с помощью двух камер. [86] Камеры могут снимать полноцветные изображения с разрешением 1600×1200 пикселей до 10 кадров в секунду и видео с аппаратным сжатием в разрешении 720p (1280×720). [91]
Одной из камер MastCam является среднеугольная камера (MAC), которая имеет фокусное расстояние 34 мм (1,3 дюйма) , поле обзора 15° и обеспечивает масштаб 22 см/пиксель (8,7 дюйма/пиксель) на расстоянии 1 км (0,62 дюйма). ми). Другая камера в MastCam — это узкоугольная камера (NAC), которая имеет фокусное расстояние 100 мм (3,9 дюйма), поле обзора 5,1° и обеспечивает масштаб 7,4 см/пиксель (2,9 дюйма/пиксель) при 1. км (0,62 мили). [86] Малин также разработал пару камер MastCam с зум-объективами. [92] но они не были включены в состав марсохода из-за времени, необходимого для тестирования нового оборудования, и приближающейся даты запуска в ноябре 2011 года. [93] Однако версия с улучшенным зумом была выбрана для использования в миссии «Марс 2020» под названием Mastcam-Z . [94]
Каждая камера имеет восемь гигабайт флэш-памяти, которая способна хранить более 5500 необработанных изображений и может применять сжатие данных без потерь в реальном времени . [86] Камеры имеют функцию автофокусировки, которая позволяет им фокусироваться на объектах размером от 2,1 м (6 футов 11 дюймов) до бесконечности. [25] В дополнение к фиксированному шаблонному фильтру Байера RGBG каждая камера имеет восьмипозиционное колесо фильтров. Хотя фильтр Байера снижает пропускную способность видимого света, все три цвета в основном прозрачны на длинах волн более 700 нм и оказывают минимальное влияние на такие инфракрасные наблюдения. [86]
Химико-камерный комплекс (ChemCam) [ править ]

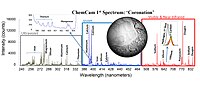
ChemCam представляет собой набор из двух инструментов дистанционного зондирования, объединенных в один: спектроскопию лазерно-индуцированного пробоя (LIBS) и телескоп Remote Micro Imager (RMI). Набор инструментов ChemCam был разработан французской лабораторией CESR и Национальной лабораторией Лос-Аламоса . [95] [96] [97] Летный макет мачтового агрегата был доставлен из французской CNES в Лос-Аламосскую национальную лабораторию . [98] Целью инструмента LIBS является определение элементного состава горных пород и почвы, в то время как RMI предоставляет ученым ChemCam изображения с высоким разрешением участков отбора проб горных пород и почвы, на которые нацелен LIBS. [95] [99] Прибор LIBS может нацеливаться на образец породы или почвы на расстоянии до 7 м (23 фута), испаряя небольшое его количество с помощью примерно 50–75 5-наносекундных импульсов лазера с длиной волны 1067 нм инфракрасного , а затем наблюдать спектр излучаемого света. мимо испаренной скалы. [100]
ChemCam способна записывать до 6144 различных длин волн ультрафиолетового , видимого и инфракрасного света. [101] Обнаружение шара светящейся плазмы осуществляется в видимом, ближнем УФ и ближнем инфракрасном диапазонах, от 240 до 800 нм. [95] Первое первоначальное лазерное тестирование ChemCam с помощью Curiosity на Марсе было проведено на камне N165 («скала «Коронация») недалеко от Брэдбери-Лендинг 19 августа 2012 года. [102] [103] [104] Команда ChemCam планирует проводить около дюжины измерений состава горных пород в день. [105] Используя ту же оптику сбора данных, RMI предоставляет контекстные изображения пятен анализа LIBS. RMI разрешает объекты размером 1 мм (0,039 дюйма) на расстоянии 10 м (33 фута) и имеет поле зрения, охватывающее 20 см (7,9 дюйма) на этом расстоянии. [95]
[ править ]

Ровер имеет две пары черно-белых навигационных камер, установленных на мачте для поддержки наземной навигации. [106] [107] Камеры имеют угол обзора 45° и используют видимый свет для захвата стереоскопических трехмерных изображений . [107] [108]
Роверская станция мониторинга окружающей среды (REMS) [ править ]
REMS включает в себя инструменты для измерения окружающей среды Марса: влажности, давления, температуры, скорости ветра и ультрафиолетового излучения. [109] Это метеорологический пакет, включающий ультрафиолетовый датчик, предоставленный Министерством образования и науки Испании . Следственную группу возглавляет Хавьер Гомес-Эльвира из Испанского астробиологического центра , а ее является Финский метеорологический институт . партнером [110] [111] Все датчики расположены вокруг трех элементов: двух стрел, прикрепленных к мачте марсохода, узла ультрафиолетового датчика (UVS), расположенного на верхней палубе марсохода, и блока управления приборами (ICU) внутри корпуса марсохода. REMS дает новые сведения об общей циркуляции Марса, микромасштабных погодных системах, местном гидрологическом цикле, разрушительном потенциале УФ-излучения и подземной обитаемости на основе взаимодействия земли и атмосферы. [110]
Камеры предотвращения опасности (HazCams) [ править ]
Ровер оснащен четырьмя парами черно-белых навигационных камер, называемых хазкамами : две пары спереди и две пары сзади. [106] [112] Они используются для автономного предотвращения опасностей во время движения ровера и для безопасного позиционирования роботизированной руки на камнях и грунте. [112] Каждая камера в паре жестко связана с одним из двух идентичных главных компьютеров для резервирования; одновременно используются только четыре из восьми камер. Камеры используют видимый свет для захвата стереоскопических трехмерных (3-D) изображений. [112] Камеры имеют поле зрения 120° и отображают местность на расстоянии до 3 м (9,8 футов) перед марсоходом. [112] Эти изображения защищают марсоход от столкновения с неожиданными препятствиями и работают в тандеме с программным обеспечением, которое позволяет марсоходу самостоятельно принимать решения по обеспечению безопасности. [112]
Mars Hand Lens Imager (MAHLI) [ править ]


MAHLI — это камера на роботизированной руке марсохода, которая снимает микроскопические изображения камней и почвы. MAHLI может делать полноцветные изображения с разрешением 1600×1200 пикселей и разрешением до 14,5 мкм на пиксель. MAHLI имеет фокусное расстояние от 18,3 до 21,3 мм (от 0,72 до 0,84 дюйма) и поле зрения 33,8–38,5 °. [87] MAHLI имеет как белую, так и ультрафиолетовую светодиодную (LED) подсветку для визуализации в темноте или флуоресцентной визуализации. MAHLI также имеет механическую фокусировку в диапазоне от бесконечных до миллиметровых расстояний. [87] Эта система может создавать некоторые изображения с обработкой фокус-стекинга . [113] MAHLI может хранить как необработанные изображения, так и выполнять прогнозирование без потерь в реальном времени или сжатие JPEG. Калибровочная мишень для MAHLI включает в себя эталоны цвета, метрическую полоску, пенни VDB Lincoln 1909 года и ступенчатый шаблон для калибровки глубины. [114]
Рентгеновский спектрометр альфа-частиц ( ) APXS
Прибор APXS облучает образцы альфа-частицами и отображает спектры рентгеновских лучей , которые повторно излучаются для определения элементного состава образцов. [115] Curiosity APXS был разработан Канадским космическим агентством (CSA). [115] MacDonald Dettwiler (MDA) , канадская аэрокосмическая компания, построившая Canadarm и RADARSAT , отвечала за инженерное проектирование и создание APXS. В научную группу APXS входят представители Университета Гвельфа , Университета Нью-Брансуика , Университета Западного Онтарио , НАСА , Калифорнийского университета, Сан-Диего и Корнелльского университета . [116] Прибор APXS использует преимущества рентгеновского излучения, вызванного частицами (PIXE) и рентгеновской флуоресценции , которые ранее использовались Mars Pathfinder и двумя марсоходами Mars Exploration Rover . [115] [117]
Химия и минералогия (ХеМин) [ править ]



CheMin для химии и минералогии и - это порошковый рентгенографический флуоресцентный прибор . [119] CheMin — один из четырех спектрометров . Он может идентифицировать и количественно оценить изобилие минералов на Марсе. Он был разработан Дэвидом Блейком в Исследовательском центре Эймса НАСА и Лаборатории реактивного движения . [120] и получил награду НАСА «Изобретение года» правительства НАСА в 2013 году. [121] Ровер может высверливать образцы из горных пород, и полученный мелкий порошок засыпается в инструмент через впускную трубку для проб, расположенную в верхней части транспортного средства. Затем на порошок направляется луч рентгеновских лучей, и кристаллическая структура минералов отклоняет его под характерными углами, что позволяет ученым идентифицировать анализируемые минералы. [122]
17 октября 2012 года на « Рокнесте первый рентгеноструктурный анализ марсианского грунта » был проведен . Результаты выявили присутствие нескольких минералов, в том числе полевого шпата , пироксенов и оливина , и предположили, что марсианская почва в образце была похожа на «выветрелые базальтовые почвы » гавайских вулканов . [118] Парагонетическая тефра из гавайского шлакового конуса добывалась для создания имитатора марсианского реголита , который исследователи могли использовать с 1998 года. [123] [124]
Анализ проб на Марсе (SAM) [ править ]
Набор приборов SAM анализирует органику и газы как из атмосферных, так и из твердых проб. Он состоит из инструментов, разработанных Центром космических полетов имени Годдарда НАСА, НАСА, Лабораторией реактивного движения Лабораторией атмосферы, среды и пространственных наблюдений (LATMOS), Межуниверситетской лабораторией атмосферных систем (LISA) (совместно управляемой французским CNRS и парижскими университетами). ) и Honeybee Robotics , а также многих других внешних партнеров. [83] [125] [126] Тремя основными приборами являются квадрупольный масс-спектрометр (QMS), газовый хроматограф (ГХ) и перестраиваемый лазерный спектрометр (TLS) . Эти инструменты выполняют точные измерения кислорода и углерода соотношений изотопов в углекислом газе (CO 2 ) и метане (CH 4 ) в атмосфере Марса , чтобы различить их геохимическое или биологическое происхождение. [83] [126] [127] [128]
Инструмент для удаления пыли (DRT) [ править ]


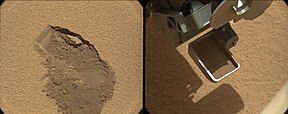
Инструмент для удаления пыли (DRT) — это моторизованная щетка с проволочной щетиной, установленная на турели на конце Curiosity руки . DRT был впервые использован на каменной цели под названием Ekwir_1 6 января 2013 года. Компания Honeybee Robotics построила DRT. [129]
Детектор радиационной оценки (RAD) [ править ]
Роль прибора для оценки радиации (RAD) состоит в том, чтобы охарактеризовать широкий спектр радиационной среды, обнаруженной внутри космического корабля на этапе полета и на Марсе. Эти измерения никогда раньше не проводились изнутри космического корабля в межпланетном пространстве. Его основная цель — определить жизнеспособность и потребности в защите потенциальных людей-исследователей, а также охарактеризовать радиационную среду на поверхности Марса, что он начал делать сразу после приземления MSL в августе 2012 года. [130] При финансовой поддержке Дирекции исследовательских систем в штаб-квартире НАСА и Космического агентства Германии ( DLR ), RAD был разработан Юго-западным исследовательским институтом (SwRI) и группой внеземной физики в Университете Христиана-Альбрехта в Киле , Германия. [130] [131]
Динамическое альбедо нейтронов (ДАН) [ править ]
В приборе DAN используется источник нейтронов и детектор для измерения количества и глубины залегания водорода , льда и воды на поверхности Марса или вблизи нее. [132] Прибор состоит из детекторного элемента (ДЭ) и импульсного генератора нейтронов с энергией 14,1 МэВ (ПНГ). Время затухания нейтронов измеряется ДЭ после каждого нейтронного импульса от PNG.ДАН предоставлен Федеральным космическим агентством России. [133] [134] и финансируется Россией. [135]
Mars Descent Imager (MARDI) [ править ]

MARDI крепится к нижнему переднему левому углу корпуса Curiosity . Во время спуска на поверхность Марса MARDI делала цветные изображения с разрешением 1600×1200 пикселей и временем экспозиции 1,3 миллисекунды, начиная с расстояний от примерно 3,7 км (2,3 мили) до почти 5 м (16 футов) от земли, со скоростью четырех кадров в секунду в течение примерно двух минут. [88] [136] MARDI имеет размер пикселей от 1,5 м (4 фута 11 дюймов) на расстоянии 2 км (1,2 мили) до 1,5 мм (0,059 дюйма) на расстоянии 2 м (6 футов 7 дюймов) и круговое поле зрения 90 °. MARDI имеет восемь гигабайт внутренней буферной памяти, способной хранить более 4000 необработанных изображений. Снимки MARDI позволили составить карту окружающей местности и места приземления. [88] JunoCam , созданная для Juno космического корабля , основана на MARDI. [137]
Роботизированная рука [ править ]
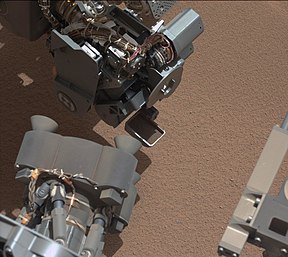

Ровер оснащен роботизированной рукой длиной 2,1 м (6 футов 11 дюймов) с крестообразной башней, вмещающей пять устройств, которые могут вращаться на 350 °. [139] [140] Рука использует три шарнира, чтобы выдвигать ее вперед и снова складывать во время движения. Он имеет массу 30 кг (66 фунтов), а его диаметр, включая установленные на нем инструменты, составляет около 60 см (24 дюйма). [141] Он был спроектирован, построен и испытан компанией MDA US Systems на основе их предыдущих разработок роботизированной руки на посадочном модуле Mars Surveyor 2001 , посадочном модуле Phoenix и двух марсоходах для исследования Марса , Spirit и Opportunity . [142]
Два из пяти устройств представляют собой натурные или контактные приборы, известные как рентгеновский спектрометр (APXS), и Mars Hand Lens Imager (камера MAHLI). Остальные три связаны с функциями сбора и подготовки проб: ударная дрель ; кисть; и механизмы для черпания, просеивания и порционирования образцов измельченной породы и почвы. [139] [141] Диаметр отверстия в камне после сверления составляет 1,6 см (0,63 дюйма) и глубина до 5 см (2,0 дюйма). [140] [143] В комплект поставки дрели входят два запасных сверла. [143] [144] Система манипуляторов и турелей марсохода может размещать APXS и MAHLI на соответствующих целях, а также получать порошкообразные образцы из недр горных пород и доставлять их в анализаторы SAM и CheMin внутри марсохода. [140]
С начала 2015 года в ударном механизме бура, который помогает долбить породу, периодически возникало короткое замыкание. [145] 1 декабря 2016 года двигатель внутри бура вызвал неисправность, из-за которой марсоход не смог переместить свою роботизированную руку и переехать в другое место. [146] Неисправность была изолирована от тормоза подачи бура, [147] и предполагается, что причиной проблемы является внутренний мусор. [145] К 9 декабря 2016 года было разрешено продолжить работы по вождению и роботизированному манипулятору, но бурение было приостановлено на неопределенный срок. [148] Команда Curiosity продолжала проводить диагностику и испытания механизма дрели в течение 2017 года. [149] и возобновил буровые работы 22 мая 2018 года. [150]
, культурное влияние наследие и СМИ

Живое видео, показывающее первые кадры с поверхности Марса, было доступно на телеканале NASA TV поздно вечером 6 августа 2012 года по тихоокеанскому времени, включая интервью с командой миссии. Сайт НАСА на мгновение стал недоступен из-за подавляющего числа посетителей, [151] а 13-минутный отрывок НАСА о приземлениях на его канале YouTube был остановлен через час после приземления автоматическим уведомлением об удалении авторских прав от Scripps Local News , которое препятствовало доступу на несколько часов. [152] в Нью-Йорке Около 1000 человек собрались на Таймс-сквер , чтобы посмотреть прямую трансляцию НАСА приземления « Кьюриосити » , пока кадры показывались на гигантском экране. [153] Бобак Фердоуси , директор посадки, стал интернет-мемом и получил статус знаменитости в Твиттере: на его аккаунт в Твиттере подписались 45 000 новых подписчиков из-за его прически-ирокез с желтыми звездами, которую он носил во время телетрансляции. [154] [155]
13 августа 2012 года президент США Барак Обама , позвонив с борта Air Force One , чтобы поздравить команду Curiosity , сказал: «Вы, ребята, являетесь примером американского ноу-хау и изобретательности. Это действительно потрясающее достижение». [156] ( Видео (07:20) )
Ученые из Института консервации Гетти в Лос-Анджелесе, штат Калифорния, рассматривали инструмент CheMin на борту Curiosity как потенциально ценное средство для изучения древних произведений искусства, не повреждая их. До недавнего времени было доступно лишь несколько инструментов, позволяющих определить состав без вырезания физических образцов, достаточно больших, чтобы потенциально повредить артефакты. CheMin направляет луч рентгеновских лучей на частицы размером до 400 мкм (0,016 дюйма). [157] и считывает излучение рассеянное , чтобы за считанные минуты определить состав артефакта. Инженеры создали уменьшенную портативную версию под названием X-Duetto . Помещаясь в несколько коробок размером с портфель , он может исследовать объекты на месте, сохраняя при этом их физическую целостность. Сейчас ученые Getty используют его для анализа большой коллекции музейного антиквариата и римских руин Геркуланума в Италии. [158]
Перед приземлением НАСА и Microsoft выпустили Mars Rover Landing , бесплатно загружаемую игру на Xbox Live , которая использует Kinect для захвата движений тела, что позволяет пользователям моделировать последовательность приземления. [159]

НАСА предоставило широкой публике возможность с 2009 по 2011 год представить свои имена для отправки на Марс. В нем приняли участие более 1,2 миллиона человек из международного сообщества, и их имена были выгравированы на кремнии с помощью электронно-лучевой машины, используемой для изготовления микроустройств в JPL , и теперь эта мемориальная доска установлена на палубе Curiosity . [160] По 40-летней традиции мемориальная доска с подписями президента Барака Обамы и вице-президента Джо Байдена также установлена . В другом месте на марсоходе находится автограф Клары Ма, 12-летней девочки из Канзаса , которая дала имя «Кьюриосити» в конкурсе эссе, в частности написав, что «любопытство — это страсть, которая движет нами в повседневной жизни». [161]
6 августа 2013 года Curiosity вслух исполнил « Happy Birthday to You » в честь одного земного года приземления на Марс, впервые песня исполнялась на другой планете. Это также был первый случай передачи музыки между двумя планетами. [162]
24 июня 2014 года «Кьюриосити» завершил марсианский год — 687 земных дней — после того, как обнаружил, что на Марсе когда-то были условия окружающей среды, благоприятные для микробной жизни . [163] Curiosity послужил основой для конструкции марсохода Perseverance для миссии марсохода Mars 2020 . некоторые запасные части, полученные при сборке и наземных испытаниях Curiosity , но он будет нести другую инструментальную полезную нагрузку. В новом автомобиле используются [164]
В 2014 году главный инженер проекта написал книгу, подробно описывающую разработку марсохода Curiosity. «Марсоход Curiosity: Внутренний отчет от главного инженера Curiosity» — это рассказ из первых рук о разработке и посадке марсохода Curiosity. [165]
5 августа 2017 года НАСА отпраздновало пятую годовщину посадки марсохода Curiosity и связанных с ним исследовательских достижений на планете Марс . [11] [12] (Видео: Curiosity Первые пять лет (02:07) ; Curiosity POV : Пять лет вождения (05:49) ; Curiosity Открытия о кратере Гейла (02:54) )
Как сообщалось в 2018 году, пробы бурения, взятые в 2015 году, обнаружили органические молекулы бензола и пропана в образцах горных пород возрастом 3 миллиарда лет в Гейле. [166] [167] [168]
Изображения [ править ]

Компоненты любопытства [ править ]
 Головка мачты с ChemCam, MastCam-34, MastCam-100, NavCam
Головка мачты с ChemCam, MastCam-34, MastCam-100, NavCam Одно из шести колес Curiosity.
Одно из шести колес Curiosity. Антенны с высоким коэффициентом усиления (справа) и низким коэффициентом усиления (слева)
Антенны с высоким коэффициентом усиления (справа) и низким коэффициентом усиления (слева) УФ-датчик
УФ-датчик




Орбитальные изображения [ править ]

 Curiosity Парашют развевается на марсианском ветру (с 12 августа 2012 г. по 13 января 2013 г.; MRO ).
Curiosity Парашют развевается на марсианском ветру (с 12 августа 2012 г. по 13 января 2013 г.; MRO ). Кратер Гейла — материалы поверхности (ложные цвета; THEMIS ; Mars Odyssey, 2001 ).
Кратер Гейла — материалы поверхности (ложные цвета; THEMIS ; Mars Odyssey, 2001 ).
 Гора Шарп возвышается посреди Гейла; зеленая точка отмечает место приземления «Кьюриосити » (север внизу).
Гора Шарп возвышается посреди Гейла; зеленая точка отмечает место приземления «Кьюриосити » (север внизу).
 Curiosity приземления Эллипс . Квадроцикл 51, называемый Йеллоунайф, отмечает место, где фактически приземлился «Кьюриосити» .
Curiosity приземления Эллипс . Квадроцикл 51, называемый Йеллоунайф, отмечает место, где фактически приземлился «Кьюриосити» . участок кратера Гейл- Кьюриосити размером 1 на 1 милю. Quad 51, отмечен
участок кратера Гейл- Кьюриосити размером 1 на 1 милю. Quad 51, отмечен MSL Поле обломков — парашют приземлился в 615 м от Curiosity (3-D: марсоход и парашют ) (17 августа 2012 г.; MRO ).
MSL Поле обломков — парашют приземлился в 615 м от Curiosity (3-D: марсоход и парашют ) (17 августа 2012 г.; MRO ).














Изображения вездехода [ править ]
 Выброшенный тепловой щит, вид аппарата Curiosity, спускающегося на поверхность Марса (6 августа 2012 г.)
Выброшенный тепловой щит, вид аппарата Curiosity, спускающегося на поверхность Марса (6 августа 2012 г.) Curiosity Первое изображение после приземления (6 августа 2012 г.). Видно колесо марсохода.
Curiosity Первое изображение после приземления (6 августа 2012 г.). Видно колесо марсохода. Curiosity Первое изображение после приземления (без прозрачного пылезащитного покрытия, 6 августа 2012 г.)
Curiosity Первое изображение после приземления (без прозрачного пылезащитного покрытия, 6 августа 2012 г.)![«Кьюриосити» приземлился 6 августа 2012 года недалеко от подножия горы Эолис (или «горы Шарп»)[169].](//upload.wikimedia.org/wikipedia/commons/thumb/6/65/673885main_PIA15986-full_full.jpg/120px-673885main_PIA15986-full_full.jpg) «Кьюриосити» приземлился 6 августа 2012 года недалеко от подножия горы Эолис (или «горы Шарп»). [169]
«Кьюриосити» приземлился 6 августа 2012 года недалеко от подножия горы Эолис (или «горы Шарп»). [169] ( MAHLI Первое цветное изображение марсианского пейзажа, сделанное Curiosity, сделанное 6 августа 2012 г.).
( MAHLI Первое цветное изображение марсианского пейзажа, сделанное Curiosity, сделанное 6 августа 2012 г.). Curiosity Автопортрет - с закрытой суперобложкой (7 сентября 2012 г.)
Curiosity Автопортрет - с закрытой суперобложкой (7 сентября 2012 г.) Curiosity Автопортрет (7 сентября 2012 г.; цветокоррекция)
Curiosity Автопортрет (7 сентября 2012 г.; цветокоррекция)
 1909 года Американский пенни с изображением Линкольна на Марсе ( Curiosity ; 10 сентября 2012 г.)
1909 года Американский пенни с изображением Линкольна на Марсе ( Curiosity ; 10 сентября 2012 г.)
( 3-D ; 2 октября 2013 г. ) Американский пенни Линкольна на Марсе ( Curiosity ; 4 сентября 2018 г.)
Американский пенни Линкольна на Марсе ( Curiosity ; 4 сентября 2018 г.)
 Curiosity Следы во время первого тест-драйва (22 августа 2012 г.), после парковки в 6 м (20 футов) от первоначального места приземления. [6]
Curiosity Следы во время первого тест-драйва (22 августа 2012 г.), после парковки в 6 м (20 футов) от первоначального места приземления. [6] Сравнение цветовых версий (сырой, натуральный, баланс белого) Эолиды Монс на Марсе (23 августа 2012 г.)
Сравнение цветовых версий (сырой, натуральный, баланс белого) Эолиды Монс на Марсе (23 августа 2012 г.)
 Слои у основания Эолиды Монс . Темный камень на вставке такого же размера, как Curiosity .
Слои у основания Эолиды Монс . Темный камень на вставке такого же размера, как Curiosity .



![«Кьюриосити» приземлился 6 августа 2012 года недалеко от подножия горы Эолис (или «горы Шарп»)[169].](http://upload.wikimedia.org/wikipedia/commons/thumb/6/65/673885main_PIA15986-full_full.jpg/120px-673885main_PIA15986-full_full.jpg)











Автопортреты [ править ]

(октябрь 2012 г.)
(май 2013 г.)

(май 2014 г.)

(январь 2015 г.)

(август 2015 г.)

(октябрь 2015 г.)

(январь 2016 г.)
(сентябрь 2016 г.)

(январь 2018 г.)

(июнь 2018 г.)

(январь 2019 г.)

(май 2019 г.)

(октябрь 2019 г.)

(ноябрь 2020 г.)

(март 2021 г.)

(ноябрь 2021 г.)
Широкие изображения [ править ]







Локации [ править ]

 Кликабельное изображение: при нажатии на метки откроется новая статья.
Кликабельное изображение: при нажатии на метки откроется новая статья. См. также [ править ]
- Испытайте любопытство – интерактивное веб-приложение
- InSight - марсианский спускаемый аппарат, прибыл в ноябре 2018 г.
- Жизнь на Марсе - Научные оценки микробной обитаемости Марса
- Программа «Викинг» - пара посадочных и орбитальных аппаратов НАСА отправлена на Марс в 1976 году.
- Хронология Марсианской научной лаборатории - Хронология событий миссии Марсианской научной лаборатории НАСА.
- Марс Экспресс
- 2001 Марсианская Одиссея
- Mars Orbiter Mission - индийский космический зонд, запущенный в 2013 году.
- Марсианский разведывательный орбитальный аппарат
- Марс 2020 – астробиологическая миссия марсохода НАСА
- Соджорнер вездеход
- Духовный вездеход
- «Опционьюнити» Марсоход
- Настойчивость вездеход
- Розалинд Франклин Ровер
- Чжуронг вездеход
- Сравнение встроенных компьютерных систем на борту марсоходов
Ссылки [ править ]
- ^ «Где любопытство?» . science.nasa.gov . НАСА . Проверено 24 июня 2024 г.
 В данной статье использован текст из этого источника, находящегося в свободном доступе .
В данной статье использован текст из этого источника, находящегося в свободном доступе . - ^ Нельсон, Джон. Марсоход «Кьюриосити» из научной лаборатории Марса . НАСА . Проверено 2 февраля 2014 г.
- ^ Абилейра, Фернандо (2013). 2011 Марсианская научная лаборатория Реконструкция траектории и характеристик от запуска до посадки . 23-е совещание AAS/AIAA по механике космических полетов. 10–14 февраля 2013 г. Кауаи, Гавайи.
- ^ Амос, Джонатан (8 августа 2012 г.). «Марсоход НАСА Curiosity поднимает навигационные камеры» . Новости Би-би-си . Проверено 23 июня 2014 г.
- ^ «Обновление MSL Sol 3» . Телевидение НАСА. 8 августа 2012 года . Проверено 9 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б с Браун, Дуэйн; Коул, Стив; Вебстер, Гай; Эгл, округ Колумбия (22 августа 2012 г.). «Марсоход НАСА начинает движение по приземлению Брэдбери» . НАСА . Архивировано из оригинала 15 ноября 2016 года . Проверено 22 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б Ханна, Джейсон (10 августа 2012 г.). «Впечатляющий» «Кьюриосити» приземлился всего в 1,5 милях от нас, сообщает НАСА» . CNN . Проверено 10 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б «Обзор» . Лаборатория реактивного движения, НАСА . Проверено 16 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б с «Марсианская научная лаборатория: Научные цели миссии» . НАСА . Август 2012 года . Проверено 17 февраля 2021 г.
- ^ «Миссия Curiosity продлена на неопределенный срок» . Ньюшуб . 5 декабря 2012 года . Проверено 17 февраля 2021 г.
- ^ Jump up to: Перейти обратно: а б Вебстер, Гай; Кантильо, Лори; Браун, Дуэйн (2 августа 2017 г.). «Пять лет назад и на расстоянии 154 миллионов миль: приземление!» . НАСА . Проверено 8 августа 2017 г.
- ^ Jump up to: Перейти обратно: а б Уолл, Майк (5 августа 2017 г.). «После пяти лет на Марсе марсоход НАСА «Кьюриосити» все еще делает большие открытия» . Space.com . Проверено 8 августа 2017 г.
- ^ Чанг, Айлса (6 августа 2022 г.). «Чему десятилетие «Кьюриосити» научило нас о жизни на Марсе» . ЭНЕРГЕТИЧЕСКИЙ ЯДЕРНЫЙ РЕАКТОР . Проверено 6 августа 2022 г.
- ^ Боско, Кассандро (12 марта 2013 г.). «Команда проекта NASA/JPL Mars Curiosity получила приз Роберта Дж. Коллиера 2012» (PDF) . Национальная аэронавтическая ассоциация . Архивировано из оригинала (PDF) 23 февраля 2014 года . Проверено 9 февраля 2014 г.
- ^ «Цели MSL» . НАСА.
- ^ Филлипс, Тони (24 февраля 2012 г.). «Любопытство, дублер» . НАСА . Архивировано из оригинала 1 августа 2012 года . Проверено 26 января 2014 г.
- ^ Гротцингер, Джон П. (24 января 2014 г.). «Обитаемость, тафономия и поиск органического углерода на Марсе» . Наука . 343 (6169): 386–387. Бибкод : 2014Sci...343..386G . дои : 10.1126/science.1249944 . ПМИД 24458635 .
- ^ «ПИА16068» . НАСА. Архивировано из оригинала 29 ноября 2014 года . Проверено 17 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б Браун, Дуэйн С.; Буис, Алан; Мартинес, Каролина (27 мая 2009 г.). «НАСА выбирает студенческую заявку в качестве названия нового марсохода» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 30 апреля 2019 года . Проверено 2 января 2017 г. В данной статье использован текст из этого источника, находящегося в свободном доступе .
- ^ Драйер, Кейси (29 июля 2020 г.). «Цена настойчивости в контексте» . Планетарное общество.
- ^ Jump up to: Перейти обратно: а б «MSL с первого взгляда» . КНЕС . Проверено 7 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б Уотсон, Трейси (14 апреля 2008 г.). «Проблемы параллельны амбициям в марсианском проекте НАСА» . США сегодня . Проверено 27 мая 2009 г.
- ^ Марсоходы: Pathfinder, MER (Дух и возможности) и MSL (видео). Пасадена, Калифорния. 12 апреля 2008 года . Проверено 22 сентября 2011 г.
- ^ «Запуск марсохода для исследования Марса» (PDF) . НАСА. Июнь 2003 г. Архивировано (PDF) из оригинала 26 июля 2004 г.
- ^ Jump up to: Перейти обратно: а б с «Марсианская научная лаборатория (MSL): Мачтовая камера (MastCam): Описание прибора» . Малинские космические научные системы . Проверено 19 апреля 2009 г.
- ^ Jump up to: Перейти обратно: а б с «Марсианская научная лаборатория — факты» (PDF) . Лаборатория реактивного движения НАСА. Март 2012 г. Архивировано из оригинала (PDF) 8 августа 2012 г. . Проверено 31 июля 2012 г.
- ^ Jump up to: Перейти обратно: а б с д и ж г час я Маковский, Андре; Илотт, Питер; Тейлор, Джим (ноябрь 2009 г.). Проектирование телекоммуникационной системы научной лаборатории Марса (PDF) . Серия обзоров дизайна и производительности DESCANSO. Том. 14. НАСА/Лаборатория реактивного движения.
- ^ Jump up to: Перейти обратно: а б с «Многоцелевой радиоизотопный термоэлектрический генератор (ММРТГ)» (PDF) . НАСА/Лаборатория реактивного движения. Октябрь 2013 г. Архивировано (PDF) из оригинала 26 февраля 2015 г. . Проверено 17 февраля 2021 г.
- ^ Jump up to: Перейти обратно: а б с «Исследование Марса: радиоизотопная энергия и нагрев для исследования поверхности Марса» (PDF) . НАСА/Лаборатория реактивного движения. 18 апреля 2006 г. Архивировано из оригинала (PDF) 12 октября 2012 г. . Проверено 7 сентября 2009 г.
- ^ Кларк, Стивен (17 ноября 2011 г.). «Ядерный генератор энергии подключен к марсоходу» . Космический полет сейчас . Проверено 11 ноября 2013 г.
- ^ Ритц, Фред; Петерсон, Крейг Э. (2004). «Обзор программы многоцелевого радиоизотопного термоэлектрического генератора (MMRTG)» (PDF) . Материалы аэрокосмической конференции IEEE 2004 г. (каталожный номер IEEE 04TH8720) . Аэрокосмическая конференция IEEE 2004 г. 6–13 марта 2004 г. Биг Скай, Монтана. стр. 2950–2957. дои : 10.1109/AERO.2004.1368101 . ISBN 0-7803-8155-6 . Архивировано из оригинала (PDF) 16 декабря 2011 года.
- ^ Кэмпбелл, Джозеф (2011). «Заправка марсианской научной лаборатории» (PDF) . Национальная лаборатория Айдахо. Архивировано из оригинала (PDF) 4 марта 2016 года . Проверено 28 февраля 2016 г.
- ^ «Технологии широкой пользы: энергетика» . НАСА/Лаборатория реактивного движения . Архивировано из оригинала 14 июня 2008 года . Проверено 20 сентября 2008 г.
- ^ «Марсианская научная лаборатория – технологии широкого применения: энергетика» . НАСА/Лаборатория реактивного движения . Проверено 23 апреля 2011 г.
- ^ Мисра, Аджай К. (26 июня 2006 г.). «Обзор программы НАСА по разработке радиоизотопных энергетических систем с высокой удельной мощностью» (PDF) . НАСА/Лаборатория реактивного движения. Архивировано из оригинала (PDF) 9 августа 2012 года . Проверено 12 мая 2009 г.
- ^ Jump up to: Перейти обратно: а б Ватанабэ, Сьюзен (9 августа 2009 г.). «Сохраняя прохладу (... или тепло!)» . НАСА/Лаборатория реактивного движения . Проверено 17 февраля 2021 г.
- ^ Jump up to: Перейти обратно: а б с д и «Марсианская научная лаборатория: Миссия: Ровер: Мозги» . НАСА/Лаборатория реактивного движения . Проверено 27 марта 2009 г.
- ^ Баджрачарья, Макс; Маймоне, Марк В.; Хелмик, Дэниел (декабрь 2008 г.). «Автономность марсоходов: прошлое, настоящее и будущее». Компьютер . 41 (12): 45. дои : 10.1109/MC.2008.515 . ISSN 0018-9162 .
- ^ «Компьютеры BAE Systems для управления обработкой данных и командованием предстоящих спутниковых миссий» (пресс-релиз). Космосдейли. 17 июня 2008 г.
- ^ «E&ISNow — СМИ ближе знакомятся с Манассасом» (PDF) . БАЕ Системс. 1 августа 2008 г. Архивировано из оригинала (PDF) 17 декабря 2008 г. . Проверено 17 ноября 2008 г.
- ^ «Радиационно-стойкий микропроцессор PowerPC RAD750» . БАЕ Системс. 1 июля 2008 г. Архивировано из оригинала (PDF) 24 декабря 2013 г. . Проверено 7 сентября 2009 г.
- ^ «Космические компьютеры RAD6000» (PDF) . БАЕ Системс. 23 июня 2008 г. Архивировано из оригинала (PDF) 4 октября 2009 г. . Проверено 7 сентября 2009 г.
- ^ Вебстер, Гай (4 марта 2013 г.). «Восстановление марсохода Curiosity идет по плану» . НАСА . Архивировано из оригинала 17 июня 2019 года . Проверено 5 марта 2013 г.
- ^ Вебстер, Гай (25 марта 2013 г.). «Любопытство возобновляет научные исследования» . НАСА . Архивировано из оригинала 2 июня 2019 года . Проверено 27 марта 2013 г.
- ^ Годен, Шарон (8 августа 2012 г.). «НАСА: Ваш смартфон такой же умный, как марсоход Curiosity» . Компьютерный мир . Архивировано из оригинала 17 июня 2018 года . Проверено 17 июня 2018 г.
- ^ «Расстояние Марс-Земля в световых минутах» . ВольфрамАльфа . Проверено 6 августа 2012 г.
- ^ «Передача данных Curiosity с Землей» . НАСА . Проверено 7 августа 2012 г.
- ^ «Марсоход НАСА Curiosity максимально увеличивает объем данных, отправляемых на Землю, используя международные стандарты передачи космических данных» (PDF) . Проверено 17 февраля 2021 г.
- ^ «Космический аппарат ЕКА записывает важные сигналы НАСА с Марса» . Марс Дейли . 7 августа 2012 года . Проверено 8 августа 2012 г.
- ^ Усилия НАСА по исследованию Марса переходят к выполнению существующих миссий и планированию возврата образцов . Джефф Фауст, Space News . 23 февраля 2018 г.
- ^ «Следующий марсоход получит комплект новых колес» . НАСА/Лаборатория реактивного движения. Июль 2010. Архивировано из оригинала 5 июля 2014 года . Проверено 6 августа 2012 г.
- ^ «Смотрите, как строится следующий марсоход НАСА, в прямом эфире с камеры Curiosity » . НАСА . 13 сентября 2011 года. Архивировано из оригинала 26 ноября 2011 года . Проверено 16 августа 2012 г.
- ^ «Новый марсоход с азбукой Морзе» . Национальная ассоциация любительского радио . 29 марта 2011 г.
- ^ Марлоу, Джеффри (29 августа 2012 г.). «Взгляд в сторону открытой дороги» . JPL — Марсианские дневники . НАСА . Проверено 30 августа 2012 г.
- ^ Лакдавалла, Эмили (19 августа 2014 г.). «Повреждение колеса любопытства: проблема и пути решения» . Блоги Планетарного общества . Планетарное общество . Проверено 22 августа 2014 г.
- ^ «Первая поездка» .
- ^ Горман, Стив (8 августа 2011 г.). «Кьюриосити» передает изображения Марса . Вещи - Наука . Проверено 8 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б «Марсианская научная лаборатория» . НАСА. Архивировано из оригинала 30 июля 2009 года . Проверено 6 августа 2012 г.
- ^ «Ванди Верма» . Исследовательские ворота . Проверено 7 февраля 2019 г.
- ^ «Д-р Ванди Верма, руководитель группы» . Лаборатория реактивного движения . ЦИТ. Архивировано из оригинала 14 апреля 2009 года . Проверено 8 февраля 2019 г.
- ^ Эстлин, Тара; Йонссон, Ари; Пасареану, Корина ; Симмонс, Рид; Цо, Кам; Верма, Ванди (апрель 2006 г.). «Язык обмена планом выполнения (PLEXIL)» (PDF) . Сервер технических отчетов НАСА . НАСА . Проверено 8 февраля 2019 г. В данной статье использован текст из этого источника, находящегося в свободном доступе .
- ^ «Библиография публикаций, связанных с PLEXIL, сгруппированная по категориям» . плексил, соусфорж . Проверено 8 февраля 2019 г.
- ^ «Главная страница: Приложения НАСА» . plexil.sourceforge . Проверено 8 февраля 2019 г.
- ^ «Квадрат Любопытства – ОБРАЗ» . НАСА . 10 августа 2012 года . Проверено 11 августа 2012 г.
- ^ Эгл, округ Колумбия; Вебстер, Гай; Браун, Дуэйн (9 августа 2012 г.). «Curiosity НАСА передает цвет 360° ящика Гейла» . НАСА . Архивировано из оригинала 2 июня 2019 года . Проверено 11 августа 2012 г.
- ^ Амос, Джонатан (9 августа 2012 г.). «Марсоход сделал первую цветную панораму» . Новости Би-би-си . Проверено 9 августа 2012 г.
- ^ Халворсон, Тодд (9 августа 2012 г.). «Квад 51: Название базы на Марсе вызывает богатые параллели на Земле» . США сегодня . Проверено 12 августа 2012 г.
- ^ «Видео с марсохода, смотрящего на Марс во время приземления» . MSNBC . 6 августа 2012 года . Проверено 7 октября 2012 г.
- ^ Янг, Моника (7 августа 2012 г.). «Смотри «Кьюриосити спускается на Марс» . Небо и телескоп . SkyandTelescope.com . Проверено 7 октября 2012 г.
- ^ Хэнд, Эрик (3 августа 2012 г.). «Кратерный холм — приз и головоломка для марсохода» . Природа . дои : 10.1038/nature.2012.11122 . S2CID 211728989 . Проверено 6 августа 2012 г.
- ^ «Книга истории кратера Гейла» . Марсианская Одиссея ТЕМИДА . Проверено 6 августа 2012 г.
- ^ Чанг, Кеннет (5 октября 2015 г.). «Марс довольно чистый. Ее работа в НАСА — поддерживать его таким» . Нью-Йорк Таймс . Проверено 6 октября 2015 г.
- ^ «Почему посадка марсохода НАСА «Кьюриосити» станет «семью минутами абсолютного ужаса» » . НАСА . Национальный центр пространственных исследований (CNES). 28 июня 2012 года . Проверено 13 июля 2012 г.
- ^ «Последние минуты прибытия «Кьюриосити» на Марс» . НАСА/Лаборатория реактивного движения . Проверено 8 апреля 2011 г.
- ^ Тейтель, Эми Шира (28 ноября 2011 г.). «Небесный журавль – как посадить Curiosity на поверхность Марса» . Научный американец . Проверено 6 августа 2012 г.
- ^ Снайдер, Майк (17 июля 2012 г.). «Марсоход приземляется в Xbox Live» . США сегодня . Проверено 27 июля 2012 г.
- ^ «Марсианская научная лаборатория: характеристики системы входа, спуска и посадки» (PDF) . НАСА . Март 2006. с. 7.
- ^ Амос, Джонатан (12 июня 2012 г.). «Марсоход НАСА Curiosity нацелен на меньшую зону приземления» . Новости Би-би-си . Проверено 12 июня 2012 г.
- ^ «Блокнот MSL — данные марсохода Curiosity» . an.rsl.wustl.edu . Проверено 9 декабря 2020 г.
- ^ Аманда Кузер (5 сентября 2020 г.). «Марсоход НАСА «Персеверанс» имеет двойника Земли по имени Оптимизм» . С/Нет.
- ^ Лаборатория реактивного движения (JPL) (4 сентября 2020 г.). «НАСА готовит земной двойник марсохода Perseverance» . Программа исследования Марса . НАСА.
- ^ Амос, Джонатан (3 августа 2012 г.). «Кратер Гейла: геологическая «кондитерская» ждет марсоход» . Новости Би-би-си . Проверено 6 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б с «Научный уголок MSL: анализ проб на Марсе (SAM)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 9 сентября 2009 г.
- ^ «Обзор приборного комплекса ЗРК» . НАСА. Архивировано из оригинала 22 февраля 2007 года.
- ^ Малин, MC; Белл, Дж. Ф.; Кэмерон, Дж.; Дитрих, МЫ; Эджетт, Канзас; и др. (2005). Мачтовые камеры и сканер спуска с Марса (MARDI) для Марсианской научной лаборатории, 2009 г. (PDF) . Лунная и планетарная наука XXXVI. п. 1214. Бибкод : 2005LPI....36.1214M .
- ^ Jump up to: Перейти обратно: а б с д и «Мачтовая камера (MastCam)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 18 февраля 2009 года . Проверено 18 марта 2009 г.
- ^ Jump up to: Перейти обратно: а б с «Mars Hand Lens Imager (MAHLI)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 23 марта 2009 г.
- ^ Jump up to: Перейти обратно: а б с «Марсианский десантный имиджер (МАРДИ)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 3 апреля 2009 г.
- ^ Стерн, Алан; Грин, Джим (8 ноября 2007 г.). «Объявление о приборном обеспечении Марсианской научной лаборатории от Алана Стерна и Джима Грина, штаб-квартира НАСА» . SpaceRef.com . Проверено 6 августа 2012 г. [ постоянная мертвая ссылка ]
- ^ Манн, Адам (7 августа 2012 г.). «Путеводитель для фотолюбителей по 17 камерам марсохода Curiosity» . Проводной . Проверено 16 января 2015 г.
- ^ Клингер, Дэйв (7 августа 2012 г.). «Curiosity желает доброго утра с Марса (и впереди напряженные дни)» . Арс Техника . Проверено 16 января 2015 г.
- ^ «Мачтовая камера (MastCam) Марсианской научной лаборатории (MSL)» . Малинские космические научные системы . Проверено 6 августа 2012 г.
- ^ Дэвид, Леонард (28 марта 2011 г.). «НАСА отказывается от 3D-камеры для следующего марсохода» . Space.com . Проверено 6 августа 2012 г.
- ^ Белл III, Дж. Ф.; Маки, Дж. Н.; Мехалл, ГЛ; Равин, Массачусетс; Каплингер, Массачусетс (2014). Mastcam-Z: геологическое, стереоскопическое и мультиспектральное исследование марсохода НАСА «Марс-2020» (PDF) . Международный семинар по приборному обеспечению для планетарных миссий, 4–7 ноября 2014 г., Гринбелт, Мэриленд. НАСА. Архивировано из оригинала (PDF) 26 сентября 2015 г. В данной статье использован текст из этого источника, находящегося в свободном доступе .
- ^ Jump up to: Перейти обратно: а б с д «Научный уголок MSL: химия и камера (ChemCam)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 9 сентября 2009 г.
- ^ Салле, Б.; Лакур, Дж.Л.; Мошьен, П.; Фише, П.; Морис, С.; и др. (2006). «Сравнительное исследование различных методологий количественного анализа горных пород с помощью спектроскопии лазерного разрушения в моделируемой марсианской атмосфере» (PDF) . Spectrochimica Acta Часть B: Атомная спектроскопия . 61 (3): 301–313. Бибкод : 2006AcSpB..61..301S . дои : 10.1016/j.sab.2006.02.003 .
- ^ Вена, RC; Морис, С.; Энгель, А; Фабри, виджей; Хатчинс, Д.А.; и др. (2008). «Исправления и уточнения, Новости недели» . Наука . 322 (5907): 1466. doi : 10.1126/science.322.5907.1466a . ПМЦ 1240923 .
- ^ «Статус ChemCam» . Лос-Аламосская национальная лаборатория. Апрель 2008. Архивировано из оригинала 9 ноября 2013 года . Проверено 6 августа 2012 г.
- ^ «Космический корабль: Конфигурация для наземных операций: Научные инструменты: ChemCam» . Архивировано из оригинала 2 октября 2006 года.
- ^ Виеру, Тудор (6 декабря 2013 г.). «Лазер Curiosity совершил 100 000 срабатываний на Марсе» . Софтпедия . Проверено 16 января 2015 г.
- ^ «Лазерный инструмент марсохода уничтожает первый марсианский камень» . 2012 . Проверено 17 февраля 2021 г.
- ^ Вебстер, Гай; Эгл, округ Колумбия (19 августа 2012 г.). «Марсианская научная лаборатория/Отчет о состоянии миссии Curiosity» . НАСА . Проверено 3 сентября 2012 г.
- ^ « Скала «Коронация» на Марсе» . НАСА . Проверено 3 сентября 2012 г.
- ^ Амос, Джонатан (17 августа 2012 г.). «Марсоход НАСА «Кьюриосити» готовится уничтожить марсианские камни» . Новости Би-би-си . Проверено 3 сентября 2012 г.
- ^ «Как работает ChemCam?» . Команда ChemCam . 2011 . Проверено 20 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б «Марсоход научной лаборатории Марса на марсианской верфи Лаборатории реактивного движения» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 10 мая 2009 года . Проверено 10 мая 2009 г.
- ^ «Первая мозаика NavCam» .
- ^ Гомес-Эльвира, Дж.; Хаберле, Б.; Гарри, А.; Мартинес-Фриас, Дж.; Ренно, Н.; Рамос, М.; Ричардсон, М.; Тауэра, М.; Алвес, Дж.; Армиенс, К.; Гомес, Ф.; Лепинетт, А.; Мораль.; Мартин, Дж.; Мартин-Торрес, Дж.; Наварро, С.; Комб, В.; Родригес-Манфреди, JA; Ромерал, Дж.; Себастьян Э.; Торрес, Дж.; Зорзано, член парламента; Урки, Р.; Морено, Дж.; Серрано, Дж.; Кастаньер, Л.; Хименес, В.; Гензер, М.; Полко, Дж. (февраль 2011 г.). «Роверская станция мониторинга окружающей среды для миссии MSL» (PDF) . 4-й международный семинар по атмосфере Марса: моделирование и наблюдения : 473. Бибкод : 2011mamo.conf..473G . Проверено 6 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б «Научный уголок MSL: вездеходная станция мониторинга окружающей среды (REMS)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 9 сентября 2009 г.
- ^ «Информационный бюллетень Марсианской научной лаборатории» (PDF) . НАСА/Лаборатория реактивного движения . Проверено 20 июня 2011 г.
- ^ Jump up to: Перейти обратно: а б с д и «Марсианская научная лаборатория: Миссия: Ровер: Глаза и другие чувства: четыре инженерных опасных камеры (камеры предотвращения опасностей)» . НАСА/Лаборатория реактивного движения . Проверено 4 апреля 2009 г.
- ^ Эджетт, Кеннет С. «Марсианский ручной объектив (MAHLI)» . НАСА. Архивировано из оригинала 20 марта 2009 года . Проверено 11 января 2012 г.
- ^ «3D-вид калибровочной мишени MAHLI» . НАСА . 13 сентября 2012 года . Проверено 11 октября 2012 г.
- ^ Jump up to: Перейти обратно: а б с «Научный уголок MSL: рентгеновский спектрометр альфа-частиц (APXS)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 9 сентября 2009 г.
- ^ «40-я конференция по науке о Луне и планетах» (PDF) . 2009.
«41-я конференция по науке о Луне и планетах» (PDF) . 2010. - ^ Ридер, Р.; Геллерт, Р.; Брюкнер Дж.; Клингельхёфер, Г.; Дрейбус, Г.; и др. (2003). «Новый рентгеновский спектрометр альфа-частиц Athena для марсоходов» . Журнал геофизических исследований . 108 (E12): 8066. Бибкод : 2003JGRE..108.8066R . дои : 10.1029/2003JE002150 .
- ^ Jump up to: Перейти обратно: а б Браун, Дуэйн (30 октября 2012 г.). «Первые исследования почвы марсоходом НАСА помогли отследить марсианские минералы» . НАСА . Архивировано из оригинала 3 июня 2016 года . Проверено 31 октября 2012 г.
- ^ «МСЛ Химия и Минералогия Рентгеновская дифракция (ЧеМин)» . НАСА/Лаборатория реактивного движения . Проверено 25 ноября 2011 г.
- ^ Саррацин, П.; Блейк, Д.; Фельдман, С.; Чипера, С.; Ваниман, Д.; и др. (2005). «Полевое развертывание портативного рентгеновского дифракционного/рентгенофлуоресцентного прибора на аналоговой местности Марса». Порошковая дифракция . 20 (2): 128–133. Бибкод : 2005PDiff..20..128S . дои : 10.1154/1.1913719 . S2CID 122528094 .
- ^ Гувер, Рэйчел (24 июня 2014 г.). «Прибор Эймса помог определить первую обитаемую среду на Марсе и получил награду за изобретение» . НАСА . Архивировано из оригинала 18 августа 2016 года . Проверено 25 июня 2014 г.
- ^ Андерсон, Роберт С.; Бейкер, Чарльз Дж.; Барри, Роберт; Блейк, Дэвид Ф.; Конрад, Памела; и др. (14 декабря 2010 г.). «Информационный пакет предложений по программе ученых-участников Марсианской научной лаборатории» (PDF) . НАСА/Лаборатория реактивного движения . Проверено 16 января 2015 г.
- ^ Бигл, LW; Питерс, Г.Х.; Мунгас, Г.С.; Бирман, GH; Смит, Дж.А.; и др. (2007). «Марсианский симулятор Мохаве: новый симулятор марсианского грунта» (PDF) . Конференция по науке о Луне и планетах (1338): 2005. Бибкод : 2007LPI....38.2005B . Проверено 28 апреля 2014 г.
- ^ Аллен, CC; Моррис, Р.В.; Линдстрем, диджей; Линдстрем, ММ; Локвуд, JP (март 1997 г.). АО «Марс-1»: симулятор марсианского реголита (PDF) . Исследование Луны и планет XXVIII. Архивировано из оригинала (PDF) 10 сентября 2014 года . Проверено 28 апреля 2014 г.
- ^ Кабане, М.; Колл, П.; Шопа, К.; Израиль, Г.; Раулин, Ф.; и др. (2004). «Существовала ли жизнь на Марсе? Поиск органических и неорганических следов — одна из целей «SAM» (анализ образцов на Марсе)» (PDF) . Достижения в космических исследованиях . 33 (12): 2240–2245. Бибкод : 2004AdSpR..33.2240C . дои : 10.1016/S0273-1177(03)00523-4 .
- ^ Jump up to: Перейти обратно: а б «Комплект инструментов для анализа проб на Марсе (SAM)» . НАСА . Октябрь 2008. Архивировано из оригинала 7 октября 2008 года . Проверено 9 октября 2009 г.
- ^ Тарситано, КГ; Вебстер, ЧР (2007). «Мультилазерная ячейка Эрриотта для планетарных перестраиваемых лазерных спектрометров». Прикладная оптика . 46 (28): 6923–6935. Бибкод : 2007ApOpt..46.6923T . дои : 10.1364/AO.46.006923 . ПМИД 17906720 .
- ^ Махаффи, Пол Р.; Вебстер, Кристофер Р.; Кабане, Мишель; Конрад, Памела Г.; Колл, Патрис; и др. (2012). «Анализ образцов в Mars Investigation и Instrument Suite» . Обзоры космической науки . 170 (1–4): 401–478. Бибкод : 2012ССРв..170..401М . дои : 10.1007/s11214-012-9879-z . S2CID 3759945 .
- ^ Московиц, Клара (7 января 2013 г.). «Ровер НАСА Curiosity впервые очистил Марс от камней» . Space.com . Проверено 16 января 2015 г.
- ^ Jump up to: Перейти обратно: а б «Домашняя страница детектора радиационной оценки (RAD) SwRI» . Юго-Западный научно-исследовательский институт . Проверено 19 января 2011 г.
- ^ «РАД» . НАСА.
- ^ «Лаборатория космической гамма-спектроскопии – ДАН» . Лаборатория космической гамма-спектроскопии. Архивировано из оригинала 21 мая 2013 года . Проверено 20 сентября 2012 г.
- ^ «Научный уголок MSL: динамическое альбедо нейтронов (ДАН)» . НАСА/Лаборатория реактивного движения. Архивировано из оригинала 20 марта 2009 года . Проверено 9 сентября 2009 г.
- ^ Литвак, М.Л.; Митрофанов И.Г.; Бармаков, Ю. Н.; Бехар, А.; Битулев А.; и др. (2008). «Эксперимент по динамическому альбедо нейтронов (DAN) для Марсианской научной лаборатории НАСА в 2009 году». Астробиология . 8 (3): 605–12. Бибкод : 2008AsBio...8..605L . дои : 10.1089/ast.2007.0157 . ПМИД 18598140 .
- ^ «Марсианская научная лаборатория: Миссия» . Лаборатория реактивного движения НАСА . Проверено 6 августа 2012 г.
- ^ «Обновление Mars Descent Imager (MARDI)» . Малинские космические научные системы. 12 ноября 2007 года. Архивировано из оригинала 4 сентября 2012 года . Проверено 6 августа 2012 г.
- ^ «Юнокам, орбитальный аппарат Юнона-Юпитер» . Малинские космические научные системы . Проверено 6 августа 2012 г.
- ^ Андерсон, Пол Скотт (3 февраля 2013 г.). «Curiosity «забивает» скалу и завершает первые испытания на бурение» . Themeridianijournal.com. Архивировано из оригинала 6 февраля 2013 года . Проверено 3 февраля 2013 г.
- ^ Jump up to: Перейти обратно: а б «Ровер Кьюриосити — Рука и рука» . Лаборатория реактивного движения . НАСА . Проверено 21 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б с Яндура, Луиза. «Отбор проб, обработка и обращение с пробами в научной лаборатории Марса: проблемы проектирования подсистем и испытаний» (PDF) . Лаборатория реактивного движения . НАСА . Проверено 21 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б «Любопытство протягивает руки» . Лаборатория реактивного движения . НАСА. 21 августа 2012. Архивировано из оригинала 22 августа 2012 года . Проверено 21 августа 2012 г.
- ^ Биллинг, Риус; Флейшнер, Ричард. Робот-манипулятор Марсианской научной лаборатории (PDF) (Отчет). MDA США Системы. Архивировано из оригинала (PDF) 6 октября 2016 года . Проверено 22 января 2017 г.
- ^ Jump up to: Перейти обратно: а б «Программа ученых-участников MSL - информационный пакет предложений» (PDF) . Вашингтонский университет. 14 декабря 2010 года . Проверено 21 августа 2012 г.
- ^ Биллинг, Риус; Флейшнер, Ричард (2011). «Робот-манипулятор Марсианской научной лаборатории» (PDF) . 15-й Европейский симпозиум по космическим механизмам и трибологии, 2011 г. Проверено 21 августа 2012 г.
- ^ Jump up to: Перейти обратно: а б Кларк, Стивен (29 декабря 2016 г.). «Внутренний мусор может стать причиной проблем с буром марсохода» . Космический полет сейчас . Проверено 22 января 2017 г.
- ^ «НАСА пытается отсоединить руку марсохода «Кьюриосити»» . Популярная механика. Ассошиэйтед Пресс. 13 декабря 2016 года . Проверено 18 января 2017 г.
- ^ Уолл, Майк (15 декабря 2016 г.). «Проблема с бурением продолжает беспокоить марсоход Curiosity» . SPACE.com . Проверено 10 февраля 2018 г.
- ^ «Сол 1545–1547: снова в движении!» . Марсоход НАСА «Кьюриосити»: новости миссии. НАСА. 9 декабря 2016 г. В данной статье использован текст из этого источника, находящегося в свободном доступе .
- ^ Лакдавалла, Эмили (6 сентября 2017 г.). «Упрямая дрель Curiosity: проблема и решения» . Планетарное общество . Проверено 10 февраля 2018 г.
- ^ Марсоход Curiosity снова бурит Дэвид Дикинон, Sky and Telescope , 4 июня 2018 г.
- ^ «Кьюриосити приземляется на Марс» . НАСА ТВ . Архивировано из оригинала 6 августа 2012 года . Проверено 6 августа 2012 г.
- ^ «Марсоход НАСА потерпел крушение в результате нарушения DMCA» . Материнская плата . Материнская плата.vice.com. 6 августа 2012 года. Архивировано из оригинала 8 августа 2012 года . Проверено 8 августа 2012 г.
- ^ «Огромные толпы наблюдали за приземлением марсохода НАСА на Марс с Таймс-сквер в Нью-Йорке» . Space.com . Проверено 8 августа 2012 г.
- ^ «Марсоход «Ирокез» — интернет-сенсация космической эры | Марсоход Curiosity» . Space.com . 7 августа 2012 года . Проверено 8 августа 2012 г.
- ^ «Посадка на Марс доказывает, что мемы теперь движутся быстрее скорости света (галерея)» . ВенчурБит . 18 июня 2012 года . Проверено 8 августа 2012 г.
- ^ Чанг, Кеннет (13 августа 2012 г.). «Марс выглядит вполне знакомым, хотя бы только на поверхности» . Нью-Йорк Таймс . Проверено 14 августа 2012 г.
- ^ Бойер, Брэд (10 марта 2011 г.). «Сооснователь inXitu получил награду NASA «Изобретение года» в 2010 году» (PDF) (пресс-релиз). ИнXиту . Архивировано из оригинала (PDF) 3 августа 2012 года . Проверено 13 августа 2012 г.
- ^ «Технологии марсианских марсоходов умеют разыскивать бесценные произведения искусства» . 10 августа 2012 года . Проверено 13 августа 2012 г.
- ^ Томен, Дэрил (6 августа 2012 г.). « Посадка марсохода» с Kinect для Xbox 360» . Новостной день . Проверено 8 августа 2012 г.
- ^ «Отправь свое имя на Марс» . НАСА . 2010. Архивировано из оригинала 7 августа 2012 года . Проверено 7 августа 2012 г.
- ^ «Ровер НАСА Curiosity летит на Марс с автографами Обамы и других людей на борту» . собирать ПРОСТРАНСТВО . Проверено 11 августа 2012 г.
- ^ Дьюи, Кейтлин (6 августа 2013 г.). «Одинокий марсоход Curiosity поет себе «С Днем Рождения» на Марсе» . Вашингтон Пост . Проверено 7 августа 2013 г.
- ^ Вебстер, Гай; Браун, Дуэйн (23 июня 2014 г.). «Марсианский марсоход Curiosity НАСА отмечает первый марсианский год» . НАСА . Проверено 23 июня 2014 г.
- ^ Харвуд, Уильям (4 декабря 2012 г.). «НАСА объявляет о планах по созданию нового марсохода стоимостью 1,5 миллиарда долларов» . CNET . Проверено 5 декабря 2012 г.
НАСА Curiosity , космическое агентство заявляет, что может построить и запустить новый марсоход в 2020 году, не выходя за рамки текущего бюджета. Используя запасные части и планы миссии, разработанные для марсохода
- ^ «Марсоход Curiosity: Внутренний отчет Curiosity…» .
- ^ Чанг, Кеннет (7 июня 2018 г.). «Жизнь на Марсе? Последнее открытие марсохода ставит ее «на стол» » . Нью-Йорк Таймс . Проверено 8 июня 2018 г.
Идентификация органических молекул в горных породах на Красной планете не обязательно указывает на жизнь там, в прошлом или настоящем, но указывает на то, что некоторые строительные блоки присутствовали.
- ^ Тен Кейт, Инге Лоес (8 июня 2018 г.). «Органические молекулы на Марсе». Наука . 360 (6393): 1068–1069. Бибкод : 2018Sci...360.1068T . дои : 10.1126/science.aat2662 . ПМИД 29880670 . S2CID 46952468 .
- ^ Эйгенброде, Дженнифер Л .; и др. (8 июня 2018 г.). «Органическое вещество, сохранившееся в аргиллитах возрастом 3 миллиарда лет в кратере Гейла на Марсе» (PDF) . Наука . 360 (6393): 1096–1101. Бибкод : 2018Sci...360.1096E . дои : 10.1126/science.aas9185 . hdl : 10044/1/60810 . ПМИД 29880683 . S2CID 46983230 .
- ^ Jump up to: Перейти обратно: а б Уильямс, Джон (15 августа 2012 г.). «Вид на улицу на 360 градусов с Марса» . ФизОрг . Проверено 16 августа 2012 г.
- ^ Бодров, Андрей (14 сентября 2012 г.). «Панорама Марса — марсоход Curiosity: Марсианский солнечный день 2» . 360Города . Архивировано из оригинала 19 августа 2012 года . Проверено 14 сентября 2012 г.
Внешние ссылки [ править ]
- Curiosity — программа НАСА по исследованию Марса
- Поиски жизни на Марсе и в других частях Солнечной системы: новости Curiosity — видеолекция Кристофера П. Маккея
- MSL - Curiosity Design и посадка на Марс - PBS Nova (14 ноября 2012 г.) - Видео (53:06)
- MSL — « Curiosity ‘StreetView’» (2–8 августа 2012 г.) – НАСА/Лаборатория реактивного движения – Панорама 360°
- MSL — Curiosity Марсоход — Узнайте больше о Curiosity — НАСА/Лаборатория реактивного движения
- MSL - Марсоход Curiosity - Виртуальный тур - НАСА/Лаборатория реактивного движения
- MSL - Галерея изображений НАСА. Архивировано 7 января 2020 г. в Wayback Machine.
- Сводки погоды с вездеходной станции мониторинга окружающей среды (REMS)
- Любопытство на X
- MSL - Новости НАСА - Конференция AGU (3 декабря 2012 г.), видео (70:13)
- Панорама (через Universe Today)
- Предлагаемый путь Curiosity на гору Шарп, НАСА, май 2019 г.





2012 в космосе |
|---|



- 2011 роботы
- 2012 на Марсе
- Четырехугольник Эолиды
- Американские изобретения
- Астробиологические космические миссии
- Индивидуальные космические аппараты
- Марсоходы
- Марсианская научная лаборатория
- Космические зонды НАСА
- Роботы на атомной энергии
- Ядерная энергетика в космосе
- Роботы США
- Шестиколесные роботы
- Мягкая посадка на Марс
- Космические зонды, запущенные в 2011 году.
- Марсианские роботы