Лунный посадочный модуль (космический корабль)
 Модель лунного корабля | |
| Тип миссии | Демонстрация технологий, Исследование |
|---|---|
| Оператор | ЧТО |
| Продолжительность миссии | Трансфер: ~2-4 месяца [1] Наземные операции: несколько месяцев (предлагается) [1] |
| Свойства космического корабля | |
| Производитель | звезд |
| Стартовая масса | ~ 2000 кг (4400 фунтов) [2] |
| Сухая масса | 750 кг (1650 фунтов) [2] |
| Размеры | высота: 3,44 м (11,3 фута) [3] диаметр: 5,6 м (18 футов) [3] |
| Начало миссии | |
| Дата запуска | 2018 (предлагается) [2] |
| Ракета | Soyuz 2.1b [1] |
| Запуск сайта | Гайанский космический центр - ELS |
| Лунный посадочный модуль | |
| Дата посадки | 2018 (предлагается) |
| Посадочная площадка | Южный полюс Луны |
Lunar Lander — роботизированная миссия, предназначенная для отправки спускаемого аппарата на Луну , возглавляемая Управлением пилотируемых космических полетов и операций ЕКА . Основная цель миссии Lunar Lander заключалась в том, чтобы продемонстрировать способность Европы безопасно и точно доставлять полезный груз на поверхность Луны. В частности, миссия продемонстрировала бы технологии, необходимые для достижения мягкой и точной посадки, при этом автономно избегая наземных опасностей, которые могут поставить под угрозу приземление и безопасность наземной миссии. Эти технологии станут преимуществом для будущих исследовательских миссий с участием человека и роботов. [4] Однако проект был приостановлен на встрече Совета министров ЕКА в 2012 году. [5]
Сценарий миссии
[ редактировать ]Запуск и перенос
[ редактировать ]Запущенный из Центра пространственной Гайаны, Куру, в конце 2018 года на ракете-носителе «Союз», спускаемый аппарат выводится на высокоэллиптическую орбиту (ВЭО) разгонным блоком «Фрегат-МТ» через серию промежуточных орбит. После отделения Фрегата посадочный модуль использует собственную двигательную установку для выхода на последнюю переходную орбиту Луны и, после общего времени перехода в несколько недель, выходит на полярную орбиту вокруг Луны. После серии маневров по снижению Аполуна и Перилуны посадочный модуль достигает своей последней низкой окололунной орбиты (LLO) на высоте 100 км. [6]
Низкая лунная орбита
[ редактировать ]Выйдя на низкую лунную орбиту, лунный посадочный модуль готовится к заключительному этапу миссии, ожидая правильного созвездия орбиты, геометрии Земли и Солнца и выполняя операции проверки и калибровки систем, критически важных для посадки. Ожидается, что время пребывания посадочного модуля в LLO до начала десантных операций составит от нескольких недель до максимум 3 месяцев. [6]
Спуск и приземление
[ редактировать ]Фаза спуска и посадки миссии начинается, когда посадочный модуль выполняет сход с орбиты вблизи северного полюса Луны. Это горение уменьшает перилуну орбиты примерно до 15 км, примерно на 500 км впереди южного полюса Луны, то есть на полорбиты позже. В период движения по инерции автоматическое визуальное распознавание ориентиров на поверхности Луны используется для определения точного местоположения спускаемого аппарата и обеспечения правильного позиционирования в начале финального спуска. Направляясь к южному полюсу, посадочный модуль вступает в заключительную фазу спуска. Используя группу двигателей, посадочный модуль замедляется и снижается. На этом этапе необходимо применять различную тягу по мере приближения посадочного модуля к месту приземления. Более высокие уровни тяги достигаются с использованием двигателей ATV с импульсной модуляцией, как показано в этом видео испытаний с горячим запуском на YouTube . На высоте нескольких километров система обнаружения и предотвращения опасностей (HDA) способна увидеть основное место приземления и оценить его. Если основная площадка считается небезопасной из-за наличия опасностей на поверхности (например, крутых склонов, кратеров, валунов, теней и т. д.), HDA имеет возможность перенацелиться на вторичную площадку приземления. Когда безопасное место приземления найдено, посадочный модуль мягко приземляется с помощью ног.
Наземные операции
[ редактировать ]После приземления на поверхность посадочный модуль выполняет важные операции, такие как развертывание антенны и мачты камеры,и передает полный пакет данных, касающихся последовательности снижения и приземления, обратно на Землю. Посадочный модуль полагается на прямую связь с Землей , поскольку для этой миссии не планируется использовать спутник-ретранслятор. Эта конфигурация подразумевает периоды, когда связь с Землей невозможна из-за того, что Земля выходит за пределы поля зрения посадочного модуля. Подобно Солнцу , Земля будет находиться ниже горизонта в соответствии с ежемесячным циклом из-за наклона оси вращения Луны относительно ее орбитальной плоскости.
Затем начинаются штатные наземные операции, которые включают развертывание конкретных полезных нагрузок на лунную поверхность с помощью роботизированной руки, активацию других полезных нагрузок для статического мониторинга на борту посадочного модуля и, в конечном итоге, сбор образцов поверхности с использованием роботизированной руки для анализа с помощью приборов на борту. посадочный модуль.
Посадочная площадка
[ редактировать ]Южный полярный регион Луны был определен как важное место для будущих исследовательских миссий из-за уникальных условий поверхности, обнаруженных в некоторых местах с точки зрения солнечного освещения, близости интересных с научной точки зрения мест, таких как постоянно затененные кратеры, и потенциального существования ресурсы, которые могут быть использованы. В совокупности эти факторы делают этот регион сильным кандидатом для будущего исследования человеком и, возможно, даже для долгосрочного присутствия в виде лунной базы. Недавние орбитальные миссии предоставили убедительные доказательства того, что южный полярный регион является важным исследовательским направлением.
Длительные периоды непрерывного солнечного освещения уникальны для полярных регионов Луны и позволяют посадочному аппарату управляться за счет солнечной энергии. Однако ожидается, что хорошо освещенные места будут ограничены по размеру (несколько сотен метров в поперечнике) и могут представлять собой участки опасной местности с крутыми склонами, валунами, кратерами или протяженной тенью. [7] Такие условия на поверхности требуют использования специальной автономной, безопасной и точной технологии приземления.
Система
[ редактировать ]Конфигурация
[ редактировать ]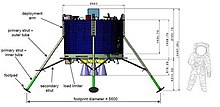
Основной корпус посадочного модуля имеет цилиндрическую форму, с четырьмя выступающими по бокам посадочными опорами.Окружность основного корпуса покрыта солнечными элементами. На нижней стороне преобладают сопла главных двигателей, а на верхней имеется место для датчиков и полезной нагрузки.
На посадочном аппарате будет использоваться роботизированная рука для сбора образцов почвы для бортового анализа.
Точная посадка, обнаружение и предотвращение опасностей
[ редактировать ]Анализ данных с Лунного разведывательного орбитального аппарата и аппарата «Кагуя» показал , что полярные посадочные площадки, предлагающие длительные периоды непрерывного освещения, ограничены по размеру. [7] Поэтому для лунного модуля требуется точность приземления в несколько сотен метров. По сравнению с предыдущими миссиями роботизированного спускаемого аппарата (например, Surveyor [8] ), технологии, необходимые для миссии Lunar Lander, потенциально могут увеличить достижимую точность приземления на один или два порядка, достигая характеристик, достигаемых только пилотируемыми аппаратами ( Apollo 12 LM приземлился всего в 150 м от зонда Surveyor 3. [9] )
Потенциальные места высадки в полярных регионах также, вероятно, будут частично покрыты тенью и могут представлять собой участки крутых склонов или большие камни. Чтобы избежать приземления на опасной местности, используется автономная система обнаружения и предотвращения опасностей (HDA). Система состоит из лидара и камеры, которые генерируют 2D и 3D изображения поверхности, а также бортового компьютера, который использует эти изображения для описания ландшафта под посадочным модулем во время финального спуска. Если зона считается небезопасной, система выдает команду на перенацеливание на безопасную зону приземления в соответствии с оставшимся топливом.
Власть
[ редактировать ]Миссии по исследованию планет часто обращались к радиоизотопным устройствам, будь то RHU или RTG, для поддержки термоконтроля и выработки электроэнергии в условиях, которые часто являются экстремальными температурами и энергетически бедными средами. Однако для Европы, где эти технологии в настоящее время недоступны, использование таких устройств имеет важные технические и программные последствия. Хотя в Европе продолжаются исследования по разработке RHU и, в конечном итоге, RTG, не ожидается, что европейские устройства будут доступны в 2018 году во время миссии Lunar Lander. [10]
Вместо этого лунный посадочный модуль питается от солнечных батарей, которые обернуты вокруг корпуса. После приземления ось симметрии аппарата будет почти перпендикулярна направлению Солнца, обеспечивая постоянное хорошее освещение солнечных элементов при вращении посадочного модуля относительно Солнца (из-за вращения Луны).
Батареи используются для кратковременного отключения солнечной энергии. Солнечная энергия недоступна в LLO, когда посадочный модуль входит в лунное затмение , а также на земле, когда горные вершины на горизонте закрывают Солнце. Десантные операции также будут осуществляться исключительно за счет питания от аккумуляторной батареи.
Движение
[ редактировать ]На космическом корабле используются три типа двигателей:
- Шесть 220N для квадроциклов подруливающих устройств [11] работал в импульсном режиме [12] для подачи переменного импульса при спуске, поскольку сам двигатель имеет фиксированный уровень тяги, в отличие от десантной двигательной установки, используемой, например, на Аполлоне.
- Пять европейских двигателей Apogee Motors 500N. [13]
- Шестнадцать небольших двигателей ориентации
Все двигатели мощностью 500 и 220 Н будут необходимы для обеспечения достаточной тяги для замедления спускаемого аппарата с низкой окололунной орбитальной скорости для управляемого окончательного спуска.
Навигация
[ редактировать ]Во время полета к Луне аппарат использует традиционные средства навигации. Это включает в себя использование IMU (комбинированного блока акселерометра и гироскопа ), звездных трекеров и датчиков Солнца . Кроме того, дальность и доплеровские измерения с Земли помогут определить положение и скорость космического корабля соответственно.
При LLO и во время снижения необходимо учитывать другие средства навигации. На ранних этапах исследования была выявлена необходимость использования абсолютной навигации, основанной на высотном зрении, наряду с относительной визуальной навигацией. [2] Эти передовые методы позволяют улучшить навигационные характеристики по сравнению с традиционными методами, такими как инерциальная навигация и определение околоземной орбиты. Кроме того, чтобы гарантировать мягкую посадку и достичь начала этапа захода на посадку в узком коридоре, требуется бортовая оценка высоты на большие расстояния, которая будет доступна посредством сочетания визуальной навигации и измерений высотомера.
Наука
[ редактировать ]Научные цели лунного модуля были установлены в рамках подготовки к исследованию человеком. К ним относятся детальное исследование параметров поверхности, имеющих большое значение для будущих операций на поверхности, будь то человеческие и/или роботизированные.
Полезная нагрузка модели была определена для решения следующих конкретных тем:
- микроскопические свойства пыли, включая форму и распределение по размерам, а также ее состав.
- Среда плазмы и электрического поля на поверхности Луны, а также поведение пыли в этой среде
- возможность проведения радиоастрономических измерений с поверхности Луны
- потенциально летучее содержание реголита (например, OH)
- пакет камер для получения визуальных данных о Южном полюсе
Вся полезная нагрузка либо статически размещается на корпусе посадочного модуля, удерживается на расстоянии от посадочного модуля специальными стрелами, либо развертывается в непосредственной близости от посадочного модуля (1–2 м) с помощью роботизированной руки. Полезные нагрузки, которые анализируют образцы реголита крупным планом, будут получать небольшие количества материала, собранного вблизи посадочного модуля с помощью устройства сбора данных на конце роботизированной руки. [1]
Статус миссии
[ редактировать ]В августе 2010 года компания Astrium была выбрана генеральным подрядчиком. [14] для фазы лунного корабля B1, [15] который включает в себя макетирование работ в области двигательной техники и навигации. [10] Фаза B1 следует за тремя технико-экономическими обоснованиями, проводимыми параллельно EADS Astrium , OHB и Thales Alenia Space и завершившимися в 2010 году.
На встрече Совета министров ЕКА в ноябре 2012 года дальнейшее финансирование проекта лунного модуля не было выделено. Германия, будучи основным донором, не смогла найти достаточную финансовую поддержку программы от других государств-членов. Немецкую делегацию в совете возглавлял Петер Хинтце, который заявил, что Германия готова внести 45% от общей стоимости миссии, но не смогла обеспечить финансовую поддержку оставшихся 55% от других государств-членов. [16]
Ссылки
[ редактировать ]- ^ Перейти обратно: а б с д Фисакерли, Р.; и др. (2010). «Миссия ЕКА по лунному посадочному модулю». АИАА .
- ^ Перейти обратно: а б с д Де Роза, Д.; и др. (5–10 июня 2011 г.). «Миссия ЕКА по лунному посадочному модулю». 8-я Международная конференция ЕКА по системам наведения, навигации и управления .
- ^ Перейти обратно: а б Карпентер, Дж.; и др. (2012). «Научная подготовка к исследованию Луны с помощью европейского лунного корабля». Планетарная и космическая наука . 74 (1): 208–223. arXiv : 1207.4965 . Бибкод : 2012P&SS...74..208C . дои : 10.1016/j.pss.2012.07.024 . S2CID 119231245 .
- ^ «Стратегия космических исследований ЕКА» . esamultimedia.esa.int . Проверено 26 июля 2016 г.
- ^ «Лунный посадочный модуль ЕКА отложен перед бюджетной конференцией» . Проверено 21 ноября 2012 г.
- ^ Перейти обратно: а б Фисакерли, Р. «Европейский лунный корабль: робототехнические операции в суровых условиях» (PDF) . ЕКА . Проверено 10 апреля 2012 г.
- ^ Перейти обратно: а б Де Роза, Д. (2012). «Характеристика потенциальных посадочных площадок для проекта лунного корабля Европейского космического агентства» (PDF) . 43-я конференция по науке о Луне и планетах; Материалы конференции . Вудлендс, Техас . Проверено 7 июля 2012 г.
- ^ Рибарич, Джей-Джей (1978). «Точность посадки топографического космического корабля». Журнал космических кораблей и ракет . 5 (7): 768–773. Бибкод : 1968JSpRo...5..768R . дои : 10.2514/3.29355 .
- ^ «Места посадки Аполлона-12 и Сюрвейера, снятые камерой лунного разведывательного орбитального аппарата» . 3 апреля 2019 г.
- ^ Перейти обратно: а б Фисакерли, Р. (2012). «Европейский лунный посадочный модуль: миссия-предшественник человеческих исследований». Глобальная конференция по исследованию космоса; Материалы конференции . Вашингтон, округ Колумбия.
- ^ «Двухкомпонентные двигатели 200 Н для квадроциклов ЕКА» . Астриум . Архивировано из оригинала 15 мая 2012 года . Проверено 5 апреля 2012 г.
- ^ «Лунный посадочный модуль готовится к приземлению» . ЕКА . Проверено 10 апреля 2012 г.
- ^ «Двухпропеллентный европейский апогейный двигатель 500 Н (EAM)» . Астриум . Архивировано из оригинала 5 апреля 2012 года . Проверено 5 апреля 2012 г.
- ^ «Астриум исследует автоматическую посадку на южном полюсе Луны» . Архивировано из оригинала 3 апреля 2013 г.
- ^ «Обзор этапов миссии аэрокосмического проекта» .
- ^ Кристоф Зайдлер (16 ноября 2012 г.). « Лунный посадочный модуль» Европейская лунная миссия провалилась» . Зеркало онлайн.