iCub
 | |
| Производитель | Итальянский технологический институт |
|---|---|
| Страна | Италия |
| Год создания | 2009 – настоящее время |
| Тип | Гуманоидный робот |
| Цель | исследовательский, развлекательный |
| Веб-сайт | www |
| Разработчик(и) | Итальянский технологический институт |
|---|---|
| Первоначальный выпуск | 2009 год |
| Стабильная версия | 1.13.0
/ 4 июля 2019 г |
| Написано в | С++ [1] |
| Операционная система | Бесплатные/свободные операционные системы: Linux , FreeBSD , NetBSD , OpenBSD ; Несвободные операционные системы: OS X , Windows. |
| Тип | Искусственный интеллект , Робототехника |
| Лицензия | GNU GPL / GNU LGPL [2] ( Бесплатное программное обеспечение ) |
| Веб-сайт | github |
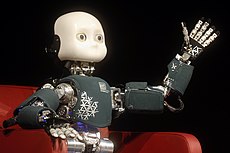
iCub высотой один метр с открытым исходным кодом робототехнического робота-гуманоида — это испытательный стенд для исследований человеческого познания и искусственного интеллекта.
Он был разработан Консорциумом RobotCub нескольких европейских университетов, построен Итальянским технологическим институтом и теперь поддерживается другими проектами, такими как ITALK . [3] Робот имеет открытый исходный код , а аппаратное обеспечение, программное обеспечение и документация выпущены под лицензией GPL . Название представляет собой частичную аббревиатуру, обозначающую «Когнитивное Универсальное Тело». Первоначальное финансирование проекта составило 8,5 миллионов евро от подразделения E5 – Когнитивные системы и робототехника – Европейской комиссии , Седьмой рамочной программы и оно длилось 65 месяцев с 1 сентября 2004 года по 31 января 2010 года.
Мотивацией сильно гуманоидного дизайна является воплощенная гипотеза познания , согласно которой манипуляции, подобные человеческим, играют жизненно важную роль в развитии человеческого познания. Младенец осваивает множество когнитивных навыков, взаимодействуя с окружающей средой и другими людьми, используя свои конечности и органы чувств, и, следовательно, его внутренняя модель мира во многом определяется формой человеческого тела. Робот был разработан для проверки этой гипотезы, позволяя выполнять сценарии когнитивного обучения путем точного воспроизведения системы восприятия и артикуляции маленького ребенка, чтобы он мог взаимодействовать с миром так же, как это делает такой ребенок. . [4]
Технические характеристики
[ редактировать ]
Размеры iCub аналогичны размеру ребенка 3,5 лет. Робот управляется встроенным контроллером PC104 , который связывается с исполнительными механизмами и датчиками с помощью CANBus .
В нем используются суставы рук и плеч с приводом от сухожилий, при этом пальцы сгибаются с помощью кабельных сухожилий с тефлоновым покрытием, проходящих внутри трубок с тефлоновым покрытием и натягивающихся против возврата пружины. Углы соединений измеряются с помощью специально разработанных датчиков Холла , а робот может быть оснащен датчиками крутящего момента. Кончики пальцев могут быть оснащены тактильными сенсорными датчиками, разрабатывается распределенная емкостная сенсорная кожа.
Библиотека программного обеспечения в основном написана на C++ и использует YARP для внешней связи через Gigabit Ethernet, а внешнее программное обеспечение реализует функциональность более высокого уровня, разработку которого взял на себя Консорциум RobotCub. [4] Робот не был разработан для автономной работы и, следовательно, не оснащен встроенными батареями или процессорами, необходимыми для этого — вместо этого шлангокабель обеспечивает питание и подключение к сети. [4]
В своей окончательной версии робот имеет 53 задействованные степени свободы, организованные следующим образом:
- по 7 в каждой руке
- По 9 в каждой руке (3 на большом пальце, 2 на указательном, 2 на среднем пальце, по 1 на соединенных безымянном пальце и мизинце, 1 на приведении/отведении)
- 6 в голове (3 на шее и 3 на камерах)
- 3 в туловище/талии
- 6 в каждой ноге
Голова имеет стереокамеры на поворотном креплении, где глаза расположены на человеке, а микрофоны сбоку. Он также имеет линии красных светодиодов, обозначающих рот и брови, установленные за лицевой панелью для создания мимики.
С момента создания первых роботов конструкция претерпела несколько изменений и улучшений, например, появились более мелкие и ловкие руки, [5] и более легкие, более крепкие ноги с большими углами суставов, которые позволяют ходить, а не просто ползать. [6]
Возможности iCub
[ редактировать ]
iCub продемонстрировал способность успешно решать, среди прочего, следующие задачи:
- ползком, используя визуальные ориентиры с оптическим маркером на полу [7]
- решение сложных 3D-лабиринтов [8] [9]
- стрельба из лука, стрельба из лука и обучение попаданию в центр мишени [10] [11]
- мимика, позволяющая iCub выражать эмоции [12]
- контроль силы с использованием проксимальных датчиков силы/крутящего момента [13]
- хватание мелких предметов, таких как мячи, пластиковые бутылки и т. д. [14]
- предотвращение столкновений в нестатических средах, а также предотвращение самостолкновений [15] [16] [17]
iCubs в мире
[ редактировать ]
Эти роботы были созданы Итальянским технологическим институтом (IIT) в Генуе и используются небольшим, но активным сообществом ученых, которые используют iCub для изучения воплощенного познания в искусственных системах. В различных лабораториях имеется около тридцати iCub, в основном в Европейском Союзе , а также один в США. [18] Первым исследователем в Северной Америке, получившим iCub, был Стивен Э. Левинсон за исследования вычислительных моделей мозга и разума, а также овладение языком. [19]
Роботы созданы IIT и стоят около 250 000 евро. [20] каждый в зависимости от версии. [21] Большая часть финансовой поддержки поступает от подразделения E5 Европейской комиссии или Итальянского института технологий (IIT) через недавно созданный отдел iCub Facility. [18] Разработка и строительство iCub в IIT является частью независимого документального фильма Plug & Pray , вышедшего в 2010 году. [22]
См. также
[ редактировать ]
Ссылки
[ редактировать ]- ^ Исходный код iCub
- ^ «АйКуб» . Проверено 27 ноября 2019 г. .
iCub распространяется с открытым исходным кодом по лицензиям GPL/LGPL и теперь может рассчитывать на всемирное сообщество энтузиастов-разработчиков.
- ^ «Когнитивная роботизированная платформа-гуманоид с открытым исходным кодом» . Официальный сайт iCub . Проверено 30 июля 2010 г.
- ^ Перейти обратно: а б с Метта, Джорджио; Сандини Джулио; Вернон Дэвид; Рождественский Лоренцо; Нори Франческо (2008). Робот-гуманоид iCub: открытая платформа для исследований в области воплощенного познания (PDF) . Для МИС'08 . Проверено 1 января 2018 г.
- ^ Июнь, Лаура (12 марта 2010 г.). «У iCub руки стали тоньше, ноги лучше» . Engadget . Проверено 30 июля 2010 г.
- ^ Цагаракис, Н.Г.; Вандерборг Брэм; Лафранки Маттео; Колдуэлл Д.Г. Механическая конструкция новой нижней части тела детского гуманоидного робота iCub (PDF) . Международная конференция IEEE по робототехнике и автоматизации (ICRA 2009). Архивировано из оригинала (PDF) 20 июля 2011 года . Проверено 30 июля 2010 г.
- ^ Ползание . iCub ГуманоидРобот. 16 апреля 2010 года. Архивировано из оригинала 11 июня 2016 года . Проверено 18 февраля 2022 г. - через YouTube .
- ^ Натх, Вишну; Стивен Левинсон. Робот-гуманоид iCub учится стрелять по мишеням . Весенний симпозиум AAAI 2013: Проектирование интеллектуальных роботов: Реинтеграция искусственного интеллекта II. Архивировано из оригинала 4 марта 2016 года . Проверено 29 сентября 2013 г.
- ^ iCub самостоятельно решает головоломку . Вишну Натх. 8 марта 2013 г. Архивировано из оригинала 16 мая 2016 г. Проверено 18 февраля 2022 г. - через YouTube .
- ^ Кормушев, Петр; Калинон Сильвен; Саэгуса Рё; Метта Джорджио. Обучение навыкам стрельбы из лука с помощью робота-гуманоида iCub (PDF) . Международная конференция IEEE по роботам-гуманоидам (Humanoids 2010) . Проверено 19 марта 2011 г.
- ^ Робот-лучник iCub . Петар Кормушев. 22 сентября 2010 г. Архивировано из оригинала 22 января 2021 г. Проверено 18 февраля 2022 г. - через YouTube .
- ^ iCub выражения лица . Вислаб Лиссабон. 17 марта 2009 г. Архивировано из оригинала 5 сентября 2020 г. Проверено 18 февраля 2022 г. - через YouTube .
- ^ Контроль силы с использованием проксимальных датчиков силы/момента - п.2 . iCub ГуманоидРобот. 11 октября 2010 года. Архивировано из оригинала 9 июня 2016 года . Проверено 18 февраля 2022 г. - через YouTube .
- ^ «На пути к разумным гуманоидам» . iCub манипулирует множеством объектов . Архивировано из оригинала 10 марта 2014 года . Проверено 22 июля 2013 г.
- ^ Франк, Михаил; Юрген Лейтнер; Марин Столленга; Грегор Кауфманн; Саймон Хардинг; Александр Фёрстер; Юрген Шмидхубер. Модульная поведенческая среда для гуманоидов и других роботов (MoBeE) (PDF) . 9-я Международная конференция по информатике в управлении, автоматизации и робототехнике (ICINCO).
- ^ Лейтнер, Юрген «Юкси»; Саймон Хардинг; Михаил Франк; Александр Фёрстер; Юрген Шмидхубер. Передача пространственного восприятия между роботами, работающими в общем рабочем пространстве (PDF) . Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS 2012).
- ^ Столленга, Марин; Лео Папе; Михаил Франк; Юрген Лейтнер; Александр Форстер; Юрген Шмидхубер. Дорожные карты, соответствующие задачам: основа планирования движений гуманоидов . Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS 2013).
- ^ Перейти обратно: а б «Проект робота-гуманоида iCub» . Итальянский технологический институт (IIT) . Проверено 1 января 2018 г.
- ^ «Робот-гуманоид учится как ребенок» . Новости Дискавери . Проверено 11 февраля 2013 г.
- ^ «XE: (EUR/USD) Курс евро к доллару США» . www.xe.com . Проверено 20 ноября 2015 г.
- ^ «Архивная копия» . Сайт iCub . Архивировано из оригинала 17 февраля 2018 года . Проверено 30 июля 2010 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ Plug & Pray , документальный фильм о социальном влиянии роботов и связанных с этим этических вопросах.
Внешние ссылки
[ редактировать ]- Носенго, Никола (27 августа 2009 г.). «Робототехника: бот, играющий в мяч» (PDF) . Природа . 460 (7259): 1076–8. дои : 10.1038/4601076а . ПМИД 19713909 . Проверено 30 июля 2010 г. - Статья о природе iCub.
- Канал YouTube — канал YouTube об iCub.
- Презентации iCub - с симпозиума по робототехнике Humanoid 2010.
- IROS'10 - Видео и мастер-класс по исследованию iCub (2010).
- На пути к разумным гуманоидам - видео, показывающее текущие возможности iCub (2012 г.)
- Консорциум RobotCub
- проект iCub
| Предшественник РоботКуб |
Гуманоидные роботы | Преемник - |