Мобильная система обслуживания


Мобильная система обслуживания ( MSS ) является роботизированной системой на борту международной космической станции (ISS). Запущенный на МКС в 2001 году, он играет ключевую роль в сборке и техническом обслуживании станции; Он перемещает оборудование и расходные материалы вокруг станции, поддерживает астронавтов, работающих в космосе, а также инструменты услуг и другие полезные нагрузки, прикрепленные к МКС, и используется для внешнего технического обслуживания. Астронавты получают специализированное обучение, чтобы они могли выполнять эти функции с различными системами MSS.
MSS состоит из трех компонентов:
- Система дистанционного манипулятора космической станции (SSRMS), известная как Canadarm2 .
- мобильная базовая система удаленного обслуживания (MBS).
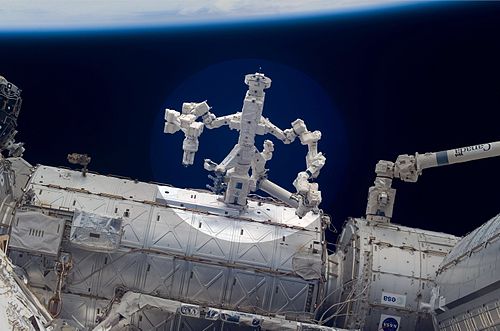
- ( Лесной манипулятор специального назначения SPDM, также известный как «dextre» или «Канада -рука» ).
Система может перемещаться по рельсам на интегрированной фермерской конструкции в верхней части США, предоставленной мобильной корзиной для транспортера, которая размещает базовую систему MRS. Программное обеспечение для управления системой было написано на языке программирования ADA 95 . [ 1 ]
MSS была разработана и изготовлена MDA (ранее подразделения Macdonald Dettwiler Associates, называемых космическими миссиями MDA , MD Robotics и ранее называемым Spar Aerospace) для вклада Канадского космического агентства в международную космическую станцию.
Canadarm2
[ редактировать ]




Официально известен как система дистанционной манипуляции космической станции (SSRMS). Запущенный на STS-100 в апреле 2001 года, эта рука второго поколения представляет собой более крупную, более продвинутую версию Space Shuttle 's оригинального Canadarm . Canadarm2 составляет 17,6 м (58 футов), когда он полностью вытянут и имеет семь моторизованных суставов (шарнир «локоть» в середине и три вращающихся соединения на каждом из конца «запястья/плечо»). Он имеет массу 1800 кг (4000 фунтов) и диаметр 35 см (14 дюймов) и изготовлен из титана. Рука способна обрабатывать большие полезные нагрузки до 116 000 кг (256 000 фунтов) и смогла помочь с утычкой космического челнока. Он является самодовольным и может перемещаться по конечным, чтобы достичь многих частей космической станции в движении, подобном дюймовым червям . В этом движении это ограничено только количеством приспособлений для схватки данных (PDGFS) на станции. PDGFS, расположенные вокруг станции, обеспечивают мощность, данные и видео на руку через любой из двух его фиксированных эффекторов (LEES). Рука также может пройти всю длину фермы космической станции с помощью мобильной базовой системы.
В дополнение к движению себя вокруг станции, рука может перемещать любой объект с захватом . При строительстве станции рука использовалась для перемещения больших сегментов на место. Он также может использоваться для захвата невозможных кораблей, таких как Dragon SpaceX , Cygnus космический корабль и японский транспортный транспортное средство H-II (HTV), которые оснащены стандартным приспособлением для схватки, который Canadarm2 использует для захвата и приземления космического корабля. Рука также используется для Unberth и выпустить космический корабль после использования.
Операторы на борту видят, что они делают, глядя на три роботизированные рабочие станции (RWS). MSS имеет два подразделения RWS: один в Destiny Module , а другой в Cupola . Только один RWS контролирует MSS за раз. RWS имеет два набора управляющих джойстиков: один вращательный ручный контроллер (RHC) и один трансляционный контроллер рук (THC). В дополнение к этому находятся панель дисплея и панели управления (DCP) и ноутбук портативной компьютерной системы (ПК).
В последние годы большинство роботизированных операций командовали дистанционно контроллерами полетов на местах в Центре управления миссиями Кристофера С. Крафта -младшего , или из Канадского космического агентства космического центра Джона Х. Чепмена . Операторы могут работать в сдвигах для достижения целей с большей гибкостью, чем когда это делается бортовыми операторами экипажа, хотя и более медленными темпами. Операторы астронавтов используются для критических операций, таких как посещение захватов транспортных средств и поддержка робототехники .
Некоторое время до 12 мая 2021 года Canadarm2 был поражен небольшим кусочком орбитального мусора, повреждающего его тепловые одеяла, и один из бумов. [ 2 ] Его операция оказалась незатронутой. [ 2 ]
Canadarm 2 также поможет приставать к модулям космической станции аксиомы до МКС . [ 3 ] [ 4 ]
Защелка конечных эффекторов
[ редактировать ]

Canadarm2 имеет два осадки, по одному на каждом конце. У Lee есть 3 провода Snare, чтобы поймать вал сбоя . [ 5 ] Другой Ли находится на подразделении Mobile Base System Oru Clackations (POA). POA Lee используется для временного удержания больших компонентов МКС. Еще один находится на ловком -манипуляторе специального назначения (SPDM, также известный как «Dextre» или «Canada Hand»). Шесть лисов были изготовлены и использованы в различных местах на МКС [ Цитация необходима ] .
| S/N. | Начальное местоположение | Текущее местоположение |
|---|---|---|
| 201 | Читать б | Поа Ли |
| 202 | Читать а | Земля, которая должна быть отремонтирована для запасного запасного |
| 203 | Поа Ли | Читать а |
| 204 | Запасной хранится на ELC1 | Читать б |
| 205 | Земля, земля | Запасной хранится на внешнем МКС |
| 301 | SPDM Lee | SPDM Lee |
Лесной манипулятор специального назначения
[ редактировать ]Лесной манипулятор специального назначения, или « dextre », представляет собой меньший двухручный робот, который может прикрепить к Canadarm2, ISS или мобильной базовой системе. Руки и их электроинструменты способны выполнять деликатные задачи сборки и меняющиеся орбитальные заместительные единицы (ORU), которые в настоящее время обрабатываются астронавтами во время космических прогулок. Хотя Canadarm2 может перемещаться по станции в «дюймовом движении», он не может нести ничего с ней, если Dextre не подключен. Тестирование было проведено в камерах космического моделирования лаборатории Канадского космического агентства Дэвида Флориды в Оттаве , Онтарио. Манипулятор был запущен на станцию 11 марта 2008 года на STS-123 .
Мобильная базовая система
[ редактировать ]
Мобильная базовая система мобильной дистанционной службы (MBS) является базовой платформой для роботизированных рук. Он был добавлен на станцию во время STS-111 в июне 2002 года. Платформа опирается на мобильный транспортер [ 6 ] (Установлен на STS-110 , разработанный Northrop Grumman в Карпинтериа, Калифорния ), что позволяет ему скользить на 108 метров вниз по рельсам на главной ферме станции . [ 7 ] Canadarm2 может переехать сама по себе, но не может носить одновременно, Dextre не может переехать сам по себе. MBS дает двум роботизированным рукам способность перемещаться на рабочие места по всей структуре фермы и встать на схватывающие приспособления по пути. Когда Canadarm2 и Dextre прикреплены к MBS, они имеют комбинированную массу 4900 кг (10 800 фунтов). [ 8 ] Как и Canadarm2, он был построен MD Robotics и имеет минимальный срок службы 15 лет. [ 7 ] [ 9 ]
MBS оснащен четырьмя приспособлениями Power Data Crapple , по одному на каждом из четырех верхних углов. Любой из них может быть использован в качестве основы для двух роботов, Canadarm2 и Dextre, а также для любой из полезных нагрузок, которые могут удерживать их. MBS также имеет два места для прикрепления полезных нагрузок. Первое - это проживание полезной нагрузки/орбитальной замены (POA). Это устройство, которое выглядит и функционирует так же, как конечные эффекторы Canadarm2. Его можно использовать для парковки, питания и командования любой полезной нагрузкой с помощью приспособления для схватки, при этом предоставление Canadarm2 свободно делать что -то еще. Другое расположение прикрепления - это система прикрепления MBS (MCAS). Это еще один тип системы привязанности, которая используется для проведения научных экспериментов. [ 10 ]
MBS также поддерживает астронавтов во время внеквартистых действий . У него есть места для хранения инструментов и оборудования, отстранения от ног, поручни и точек привязанности к безопасности, а также сборки камеры. При необходимости, астронавт даже может «ездить» на MBS, пока он движется с максимальной скоростью около 1,5 метра в минуту. [ 6 ] С обеих сторон MBS находятся вспомогательные средства для перевода экипажа и оборудования. Эти тележки едут по тем же рельсам, что и MBS. Астронавты ездят на них вручную во время перевозки оборудования вручную, чтобы облегчить их движения вокруг станции.
Усовершенствованная сборка стрелы на Месс
[ редактировать ]Установлен 27 мая 2011 года, представляет собой 15,24 метра (50-футовый) бум с поручниками и камерами проверки, прикрепленной к концу Canadarm2.
-
 Система дистанционного манипулятора трансфера (RMS), удерживающая бум OBS на STS-114
Система дистанционного манипулятора трансфера (RMS), удерживающая бум OBS на STS-114 -
 Астронавт Скотт Паразинский (справа) ездит на бум OBS для восстановления солнечной батареи во время STS-120
Астронавт Скотт Паразинский (справа) ездит на бум OBS для восстановления солнечной батареи во время STS-120


Другая робототехника МКС
[ редактировать ]Станция получила вторую роботизированную руку во время STS-124 , японского экспериментального модуля удаленного манипулятора модуля (JEM-RMS). JEM-RMS в первую очередь используется для обслуживания экспонированного объекта JEM . Дополнительная роботизированная рука, европейская роботизированная рука (ERA) была запущена вместе с многоцелевым лабораторным модулем России, построенным в России 15 июля 2021 года.
Первоначально подключенный к PIRS, ISS также имеет два грузовых крана Стрела . Один из кранов может быть продлен, чтобы достичь конца Zarya . Другой может простираться на противоположную сторону и достичь конца Zvezda . Первый кран был собран в космосе во время STS-96 и STS-101 . Второй кран был запущен вместе с самим PIRS. Позже краны были перемещены в модуль стыковки Poisk и Zarya .
Список кранов
[ редактировать ]| Имя | Агентство или компания | Запуск |
|---|---|---|
| Canadarm 2 | Канадское космическое агентство | 19 апреля 2001 г. |
| Декстер | Канадское космическое агентство | 11 марта 2008 г. |
Смотрите также
[ редактировать ]- Macdonald Dettwiler and Associates (MDA) , производители Canadarm2
- CanAdarm , который использовался на орбитальных операторах космического челнока
- Европейская роботизированная рука , третья роботизированная рука, установленная на МКС
- Система удаленного манипулятора, используемая в модуле ISS Kibo
- Dextre , также известный как ловый манипулятор специального назначения (SPDM), используемый на ISS
- Стрела , кран, используемый на МКС для выполнения аналогичных задач, как и мобильная система обслуживания
Ссылки
[ редактировать ]- ^ «Тематическое исследование: MDA - канадская космическая рука» (PDF) . Адакор . Получено 2009-10-15 .
- ^ Jump up to: а беременный Мишель, Звезда (31 мая 2021 г.). «Космический мусор попал и повредил международную космическую станцию» . Наука оповещения . Получено 31 мая 2021 года .
- ^ «Сборка аксиомы в сборе - пространство аксиомы пространства» . Пространство аксиомы . Получено 2021-08-09 .
- ^ «Частная космическая станция может быть рождена от ISS - искатель» . www.seeker.com . 25 января 2017 года . Получено 2021-09-26 .
- ^ EVA контрольный список STS-126 Полетная добавка, 2008 г., страницы 115, 117, 118
- ^ Jump up to: а беременный «Самый медленный и самый быстрый поезд во вселенной» . НАСА.
- ^ Jump up to: а беременный «О мобильной базовой системе» . Правительство Канады. 20 июня 2018 года . Получено 2 января 2023 года .
- ^ Гарсия, Марк (22 октября 2018 г.). «Мобильная система обслуживания» . НАСА .
- ^ "Робот космического века" . MIT Technology Review . Получено 2 января 2023 года .
- ^ «CSA - STS -111 - мобильная базовая система - дизайн MBS» . Канадское космическое агентство. Архивировано из оригинала 2008-09-21 . Получено 2008-03-15 .
Дальнейшее чтение
[ редактировать ]- Роботизированная передача и интерфейсы для внешних полезных нагрузок. 2014 Хорошие диаграммы SSRMS/Canadarm2
Внешние ссылки
[ редактировать ]- Сборка МКС: Canadarm2 и мобильная система обслуживания
- Информация о канадском космическом агентстве о Canadarm2
- Анимация YouTube мобильной базовой системы, Canadarm2 и Dextre Работают вместе
- Анимация на YouTube Canadarm2 дюйм -черви на станции
Компоненты Международной космической станции |
|---|
