Роботизированная парадигма
(Перенаправлено из робототехнических парадигм )
В этой статье есть несколько проблем. Пожалуйста, помогите улучшить его или обсудите эти проблемы на странице обсуждения . ( Узнайте, как и когда удалять эти шаблонные сообщения )
|
В робототехнике — робототехническая парадигма это мысленная модель того, как работает робот. Робототехническую парадигму можно описать взаимосвязью между тремя основными элементами робототехники : восприятием, планированием и действием . Это также можно описать тем, как сенсорные данные обрабатываются и распределяются по системе и где принимаются решения.
Иерархическая/совещательная парадигма
[ редактировать ]- Робот действует по принципу «сверху вниз» и требует тщательного планирования.
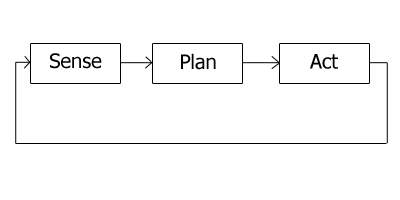
- Робот ощущает мир, планирует следующее действие, действует; на каждом этапе робот явно планирует следующий ход.
- Все данные зондирования имеют тенденцию быть собраны в одну глобальную модель мира.
Реактивная парадигма
[ редактировать ]- Чувственно-актовый тип организации.
- Робот имеет несколько экземпляров муфт Sense-Act.
- Эти связи представляют собой параллельные процессы, называемые поведениями, которые берут данные локального зондирования и вычисляют наилучшее действие независимо от того, что делают другие процессы.
- Робот будет выполнять комбинацию действий.

Гибридная преднамеренная/реактивная парадигма
[ редактировать ]- Робот сначала планирует (обдумывает), как лучше всего разложить задачу на подзадачи (также называемое «планированием миссии»), а затем какое поведение подходит для выполнения каждой подзадачи.
- Затем поведение начинает выполняться в соответствии с реактивной парадигмой.
- Сенсорная организация также представляет собой смесь иерархического и реактивного стилей; Данные датчика перенаправляются на каждое поведение, которое нуждается в этом датчике, но также доступны планировщику для построения ориентированной на задачи глобальной модели мира.

См. также
[ редактировать ]Ссылки
[ редактировать ]- Асада, Х. и Слотин, Ж.-Ж.Э. (1986). Анализ и управление роботами. Уайли. ISBN 0-471-83029-1 .
- Аркин, Рональд К. (1998). Робототехника, основанная на поведении. МТИ Пресс. ISBN 0-262-01165-4 .
