Пропорционально-интегрально-производный регулятор
Пропорционально -интегрально-производный регулятор ( ПИД-регулятор или трехчленный регулятор ) представляет собой механизм контура управления , использующий обратную связь , который широко используется в промышленных системах управления и ряде других приложений, требующих непрерывно модулированного управления. ПИД-регулятор непрерывно вычисляет значение ошибки. как разница между желаемым заданным значением (SP) и измеряемой переменной процесса (PV) и применяет поправку, основанную на пропорциональных , интегральных и производных условиях (обозначаемых P , I и D соответственно), отсюда и название.

ПИД-системы автоматически применяют точную и оперативную коррекцию функции управления. Повседневным примером является круиз-контроль в автомобиле, где при подъеме на холм скорость снижается, если использовать постоянную мощность двигателя. ПИД-алгоритм контроллера восстанавливает измеренную скорость до желаемой с минимальной задержкой и превышением за счет контролируемого увеличения выходной мощности двигателя.
Первый теоретический анализ и практическое применение ПИД были в области систем автоматического рулевого управления для кораблей, разрабатывавшихся с начала 1920-х годов. Затем он использовался для автоматического управления процессами в обрабатывающей промышленности, где получил широкое распространение в пневматических, а затем и в электронных контроллерах . Сегодня концепция ПИД-регулятора используется повсеместно в приложениях, требующих точного и оптимизированного автоматического управления.
Основная операция [ править ]

Отличительной особенностью ПИД-регулятора является возможность использовать три условия управления : пропорциональное, интегральное и производное влияние на выходной сигнал регулятора для точного и оптимального управления. Блок-схема справа показывает принципы создания и применения этих терминов. На нем показан ПИД-регулятор, который постоянно рассчитывает значение ошибки. как разница между желаемой уставкой и измеряемая переменная процесса : и применяет поправку, основанную на пропорциональных , интегральных и производных условиях. Контроллер пытается минимизировать ошибку с течением времени путем регулировки управляющей переменной. , например открытие регулирующего клапана , до нового значения, определяемого взвешенной суммой условий управления.




В этой модели:
- Член P пропорционален текущему значению SP — ошибка PV. . Например, если ошибка велика, выходной сигнал управления будет пропорционально большим при использовании коэффициента усиления «K p ». Использование только пропорционального управления приведет к ошибке между заданным значением и значением процесса, поскольку контроллеру требуется ошибка для генерации пропорционального выходного отклика. В установившихся условиях процесса достигается равновесие с устойчивым «смещением» SP-PV.
- Член I учитывает прошлые значения ошибки SP – PV и интегрирует их с течением времени, чтобы получить I. член Например, если после применения пропорционального управления существует остаточная ошибка SP - PV, интегральный член стремится устранить остаточную ошибку путем добавления эффекта управления из-за исторического накопленного значения ошибки. После устранения ошибки интегральный член перестанет расти. Это приведет к уменьшению пропорционального эффекта с уменьшением погрешности, но это компенсируется ростом интегрального эффекта.
- Член D представляет собой наилучшую оценку будущей тенденции ошибки SP - PV, основанную на ее текущей скорости изменения. Его иногда называют «упреждающим контролем», поскольку он эффективно направлен на уменьшение эффекта ошибки SP – PV путем оказания управляющего воздействия, создаваемого скоростью изменения ошибки. Чем быстрее изменение, тем сильнее контролирующий или демпфирующий эффект. [1]
Настройка . Баланс этих эффектов достигается за счет настройки контура для получения оптимальной функции управления. Константы настройки показаны ниже как «K» и должны быть получены для каждого приложения управления, поскольку они зависят от характеристик отклика всего контура, внешнего по отношению к контроллеру. Они зависят от поведения измерительного датчика, исполнительного элемента управления (например, регулирующего клапана), любых задержек управляющего сигнала и самого процесса. Приблизительные значения констант обычно можно первоначально ввести, зная тип приложения, но они обычно уточняются или настраиваются путем «ускорения» процесса на практике путем внесения изменения уставки и наблюдения за реакцией системы. [2]
Управляющее действие . Как математическая модель, так и практический цикл, описанные выше, используют прямое управляющее воздействие для всех членов, что означает, что увеличение положительной ошибки приводит к увеличению положительной коррекции выходного сигнала управления. Система называется обратным действием, если необходимо применить отрицательное корректирующее воздействие. Например, если клапан в контуре потока имел открытие 100–0% клапана для выходного сигнала управления 0–100% – это означает, что действие контроллера необходимо изменить на противоположное. Некоторые схемы управления технологическими процессами и элементы исполнительного управления требуют этого обратного действия. Примером может служить клапан охлаждающей воды, где безопасным режимом в случае потери сигнала будет 100% открытие клапана; поэтому выходной сигнал контроллера 0% должен вызывать 100% открытие клапана.
Математическая форма [ править ]
Общая функция управления

где , , и , все неотрицательные, обозначают коэффициенты для пропорциональных, интегральных и производных членов соответственно (иногда обозначаются P , I и D ).



В стандартной форме уравнения (см. далее в статье) и соответственно заменяются на и ; преимущество этого в том, что и имеют некоторый понятный физический смысл, поскольку представляют время интегрирования и время производной соответственно. — постоянная времени, с которой контроллер пытается приблизиться к заданному значению. определяет, как долго контроллер будет терпеть постоянное нахождение выходного сигнала выше или ниже заданного значения.





терминов контрольных Выборочное использование
Хотя ПИД-регулятор имеет три условия управления, некоторым приложениям для обеспечения надлежащего управления требуется только один или два условия. Это достигается путем установки неиспользуемых параметров на ноль и называется ПИ-, ПД-, П- или И-регулятором при отсутствии других управляющих воздействий. ПИ-регуляторы довольно распространены в приложениях, где производное действие чувствительно к шуму измерения, но интегральный член часто необходим для того, чтобы система достигла целевого значения.
Применимость [ править ]
Использование ПИД-алгоритма не гарантирует оптимального управления системой или устойчивости ее регулирования ( ). Могут возникнуть ситуации, когда имеются чрезмерные задержки: измерение значения процесса задерживается или управляющее воздействие не применяется достаточно быстро. В этих случаях компенсация опережения-запаздывания должна быть эффективной. Реакцию контроллера можно описать с точки зрения его реакции на ошибку, степени отклонения системы от заданного значения и степени любых колебаний системы . Но ПИД-регулятор широко применим, поскольку он полагается только на реакцию измеряемой переменной процесса, а не на знания или модель основного процесса. [3]
История [ править ]


Происхождение [ править ]
Непрерывное управление, до того как ПИД-регуляторы были полностью изучены и реализованы, одним из своих истоков был центробежный регулятор , который использует вращающиеся грузы для управления процессом. Это изобрел Христиан Гюйгенс в 17 веке, чтобы регулировать зазор между жерновами в ветряных мельниц зависимости от скорости вращения и тем самым компенсировать переменную скорость подачи зерна. [4] [5]
С изобретением стационарного парового двигателя низкого давления возникла необходимость в автоматическом регулировании скорости, и » регулятор Джеймса Уатта появился « конический маятниковый , который представлял собой набор вращающихся стальных шариков, прикрепленных к вертикальному шпинделю с помощью рычагов. быть отраслевым стандартом. Это было основано на концепции контроля зазоров в жерновах. [6]
Однако управление скоростью с помощью вращающегося регулятора по-прежнему оставалось переменным в условиях изменяющейся нагрузки, где был очевиден недостаток того, что теперь известно как пропорциональное управление. Ошибка между желаемой и фактической скоростью будет увеличиваться с увеличением нагрузки. В XIX веке теоретическая основа работы губернаторов была впервые описана Джеймсом Клерком Максвеллом в 1868 году в его теперь известной статье «О губернаторах» . Он исследовал математическую основу устойчивости управления и хорошо продвинулся к решению, но призвал математиков изучить эту проблему. [7] [6] Проблема была исследована далее в 1874 году Эдвардом Раутом , Чарльзом Штурмом и в 1895 году Адольфом Гурвицем , которые внесли свой вклад в установление критериев устойчивости управления. [6] В последующих приложениях регуляторы скорости были дополнительно усовершенствованы, в частности, американским ученым Уиллардом Гиббсом , который в 1872 году теоретически проанализировал конический маятниковый регулятор Уотта.
Примерно в это же время изобретение торпеды Уайтхеда создало проблему управления, которая требовала точного контроля глубины хода. Использование только датчика глубинного давления оказалось недостаточным, и маятник, измерявший передний и задний шаг торпеды, был объединен с измерением глубины, чтобы стать маятниково-гидростатическим регулятором . Регулирование давления обеспечивало только пропорциональное управление, которое, если усиление управления было слишком высоким, становилось нестабильным и переходило в перерегулирование со значительной нестабильностью удержания глубины. Маятник добавил то, что теперь известно как производное управление, которое гасило колебания, определяя угол пикирования/подъёма торпеды и, следовательно, скорость изменения глубины. [8] Это событие (названное Уайтхедом «Секретом», чтобы не дать ключа к его действию) произошло примерно в 1868 году. [9]
Другой ранний пример ПИД-регулятора был разработан Элмером Сперри в 1911 году для управления судном, хотя его работа была скорее интуитивной, чем математической. [10]
Однако только в 1922 году формальный закон управления для того, что мы сейчас называем ПИД или трехчленным регулированием, был впервые разработан с использованием теоретического анализа русско-американским инженером Николасом Минорским . [11] Минорский исследовал и проектировал автоматическое управление кораблем для ВМС США и основывал свой анализ на наблюдениях рулевого . Он отметил, что рулевой управлял кораблем, основываясь не только на текущей ошибке курса, но и на прошлой ошибке, а также на текущей скорости изменения курса; [12] Затем Минорский дал этому математическую обработку. [6] Его целью была стабильность, а не общий контроль, что значительно упростило проблему. Хотя пропорциональное управление обеспечивало устойчивость к небольшим возмущениям, его было недостаточно для борьбы с устойчивыми возмущениями, особенно с сильным штормом (из-за установившейся ошибки ), что требовало добавления интегрального члена. Наконец, производный член был добавлен для улучшения стабильности и контроля.
Испытания проводились на авианосце США « Нью-Мексико» , где контроллеры контролировали угловую скорость (а не угол) руля направления. ПИ-управление обеспечивало устойчивое отклонение от курса (угловую ошибку) ± 2 °. Добавление элемента D дало погрешность отклонения от курса ± 1/6 °, что было лучше, чем могло достичь большинство рулевых. [13]
В конечном итоге ВМФ не принял эту систему из-за сопротивления персонала. Аналогичная работа была проведена и опубликована несколькими другими [ ВОЗ? ] в 1930-е годы. [ нужна ссылка ]
Промышленный контроль [ править ]
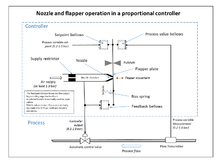
Широкое использование контроллеров с обратной связью стало невозможным до тех пор, пока не были разработаны широкополосные усилители с высоким коэффициентом усиления, использующие концепцию отрицательной обратной связи . Он был разработан Гарольдом Блэком в области телефонной инженерной электроники в конце 1920-х годов, но опубликован только в 1934 году. [6] Независимо Клессон Э. Мейсон из компании Foxboro в 1930 году изобрел широкополосный пневматический контроллер, объединив пневматический усилитель с высоким коэффициентом усиления сопла и заслонки , изобретенный в 1914 году, с отрицательной обратной связью с выхода контроллера. Это значительно увеличило линейный диапазон работы усилителя сопла и заслонки, а также можно было добавить интегральное управление за счет использования прецизионного спускного клапана и сильфона, генерирующего интегральный член. Результатом стал контроллер Stabilog, который обеспечивал как пропорциональные, так и интегральные функции с использованием сильфонов обратной связи. [6] Интегральный термин получил название Reset . [14] Позже к производному члену добавились дополнительные сильфоны и регулируемое отверстие.
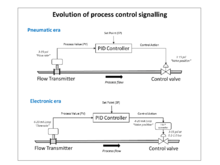
Примерно с 1932 года использование широкополосных пневматических контроллеров быстро возросло в различных приложениях управления. Давление воздуха использовалось для формирования выходного сигнала контроллера, а также для питания устройств регулирования процесса, таких как регулирующие клапаны с мембранным управлением. Это были простые устройства, не требующие особого ухода, которые хорошо работали в суровых промышленных условиях и не создавали риска взрыва в опасных зонах . Они были отраслевым стандартом на протяжении многих десятилетий до появления дискретных электронных контроллеров и распределенных систем управления (РСУ).
С помощью этих контроллеров был установлен стандарт пневматической сигнализации 3–15 фунтов на квадратный дюйм (0,2–1,0 бар), который имел повышенный ноль, чтобы гарантировать, что устройства работают в пределах своей линейной характеристики, и представлял собой диапазон управления 0–100%.
В 1950-х годах, когда электронные усилители с высоким коэффициентом усиления стали дешевыми и надежными, стали популярными электронные ПИД-регуляторы, а пневматический стандарт эмулировался сигналами токовой петли 10–50 мА и 4–20 мА (последний стал отраслевым стандартом). Пневматические полевые приводы по-прежнему широко используются из-за преимуществ пневматической энергии для регулирующих клапанов на технологических предприятиях.

Большинство современных ПИД-регуляторов в промышленности реализованы в виде компьютерного программного обеспечения в РСУ, программируемых логических контроллерах (ПЛК) или дискретных компактных контроллерах .
Электронные аналоговые контроллеры [ править ]
Электронно-аналоговые контуры ПИД-управления часто встречаются в более сложных электронных системах, например, в позиционировании головки дисковода , обеспечении электропитания источника питания или даже в схеме обнаружения движения современного сейсмометра . Дискретные электронные аналоговые контроллеры были в значительной степени заменены цифровыми контроллерами, использующими микроконтроллеры или FPGA для реализации ПИД-алгоритмов. Однако дискретные аналоговые ПИД-регуляторы по-прежнему используются в нишевых приложениях, требующих высокой пропускной способности и малошумящей производительности, таких как контроллеры на лазерных диодах. [15]
Пример контура управления [ править ]
Рассмотрим роботизированную руку [16] который можно перемещать и позиционировать с помощью контура управления. Электродвигатель . может поднимать или опускать рычаг в зависимости от приложенной мощности вперед или назад, но мощность не может быть простой функцией положения из-за инерционной массы рычага, сил гравитации, внешних сил на рычаге, таких как нагрузка поднимать или выполнять работу над внешним объектом.
- Измеренное положение является переменной процесса (PV).
- Требуемое положение называется заданным значением (SP).
- Разница между PV и SP представляет собой ошибку (e), которая количественно определяет, является ли плечо слишком низким или слишком высоким и на сколько.
- Входным сигналом процесса ( электрический ток в двигателе) является выходной сигнал ПИД-регулятора. Ее называют либо управляющей переменной (MV), либо управляющей переменной (CV).
Путем измерения положения (PV) и вычитания его из заданного значения (SP) находится ошибка (e), и на ее основе контроллер рассчитывает, какой электрический ток необходимо подать на двигатель (MV).
Пропорциональный [ править ]
Очевидный метод – пропорциональное управление: ток двигателя устанавливается пропорционально существующей ошибке. Однако этот метод терпит неудачу, если, например, рука должна поднимать разные веса: больший вес требует приложения большей силы для той же самой ошибки на нижней стороне, но меньшей силы, если ошибка мала на верхней стороне. Вот где свою роль играют интегральные и производные члены.
Интеграл [ править ]
Интегральный . член увеличивает действие не только по отношению к ошибке, но и по времени, в течение которого она сохранялась Таким образом, если приложенной силы недостаточно, чтобы свести ошибку к нулю, эта сила будет увеличиваться с течением времени. Чистый «Я»-контроллер мог бы свести ошибку к нулю, но это было бы как медленное реагирование в начале (потому что действие вначале было бы небольшим, в зависимости от времени, чтобы стать значительным), так и жестокое в конце (действие увеличивается). пока ошибка положительна, даже если ошибка начала приближаться к нулю).
Применение слишком большого интеграла, когда ошибка мала и уменьшается, приведет к перерегулированию. Если после перерегулирования контроллер применит большую коррекцию в противоположном направлении и неоднократно выйдет за желаемое положение, выходной сигнал будет колебаться вокруг заданного значения либо в постоянной, либо в растущей, либо в затухающей синусоиде . Если амплитуда колебаний увеличивается со временем, система неустойчива. Если они уменьшаются, система устойчива. Если колебания остаются постоянной величины, система является минимально устойчивой .
Производная [ править ]
член Производный учитывает не величину ошибки (то есть он не может довести ее до нуля: чистый D-контроллер не может довести систему до заданного значения), а скорость изменения ошибки, пытаясь довести эту скорость до нуля. Он направлен на то, чтобы сгладить траекторию ошибки до горизонтальной линии, демпфировать приложенную силу и, таким образом, уменьшить перерегулирование (ошибку на другой стороне из-за слишком большой приложенной силы).
Контроль демпфирования [ править ]
В интересах своевременного и точного достижения контролируемого прибытия в желаемое положение (SP) управляемая система должна быть критически демпфирована . Хорошо настроенная система управления положением также будет подавать необходимые токи на управляемый двигатель, чтобы рычаг толкал и тянул по мере необходимости, чтобы противостоять внешним силам, пытающимся переместить его из требуемого положения. Сама уставка может генерироваться внешней системой, такой как ПЛК или другой компьютерной системой, так что она постоянно изменяется в зависимости от работы, которую ожидается от роботизированной руки. Хорошо настроенная система ПИД-управления позволит манипулятору максимально соответствовать этим меняющимся требованиям.
Реакция на нарушения [ править ]
Если контроллер стартует из стабильного состояния с нулевой ошибкой (PV = SP), то дальнейшие изменения контроллера будут происходить в ответ на изменения других измеряемых или неизмеренных входных параметров процесса, которые влияют на процесс и, следовательно, на PV. Переменные, которые влияют на процесс, отличный от MV, известны как возмущения. Обычно контроллеры используются для подавления помех и внесения изменений в заданные значения. Изменение нагрузки на манипулятор является нарушением процесса управления манипулятором робота.
Приложения [ править ]
Теоретически контроллер можно использовать для управления любым процессом, имеющим измеримый выход (PV), известное идеальное значение этого выхода (SP) и входные данные процесса (MV), которые будут влиять на соответствующий PV. Контроллеры используются в промышленности для регулирования температуры , давления , силы , скорости подачи , [17] скорость потока , химический состав ( концентрации компонентов ), вес , положение , скорость и практически все остальные переменные, для которых существует измерение.
Теория контроллера [ править ]
- В этом разделе описывается параллельная или невзаимодействующая форма ПИД-регулятора. Другие формы см. в § Альтернативная номенклатура и формы .
Схема ПИД-регулирования названа в честь трех ее корректирующих членов, сумма которых составляет регулируемую переменную (MV). Пропорциональные, интегральные и производные члены суммируются для расчета выходного сигнала ПИД-регулятора. Определение в качестве выхода контроллера окончательная форма ПИД-алгоритма имеет вид

где
- пропорциональное усиление, параметр настройки,
- — интегральный коэффициент усиления, параметр настройки,
- — производный коэффициент усиления, параметр настройки,
- – ошибка (SP – уставка, а PV( t ) – переменная процесса),
- время или мгновенное время (настоящее время),
- – переменная интегрирования (принимает значения от момента времени 0 до настоящего времени ).



Эквивалентно, передаточная функция в области Лапласа ПИД-регулятора равна

где – комплексная частота.

Пропорциональный член [ править ]

Пропорциональный член создает выходное значение, пропорциональное текущему значению ошибки. Пропорциональный отклик можно отрегулировать, умножив ошибку на константу K p , называемую константой пропорционального усиления.
Пропорциональный член определяется выражением

Высокий пропорциональный коэффициент усиления приводит к значительному изменению выходного сигнала при заданном изменении ошибки. Если пропорциональное усиление слишком велико, система может стать нестабильной (см. раздел «Настройка контура »). Напротив, небольшой коэффициент усиления приводит к небольшому выходному отклику на большую входную ошибку и к менее отзывчивому или менее чувствительному контроллеру. Если пропорциональное усиление слишком низкое, управляющее воздействие может быть слишком малым при реагировании на возмущения в системе. Теория настройки и промышленная практика показывают, что пропорциональный член должен вносить большую часть изменения выпуска. [ нужна ссылка ]
Стационарная ошибка [ править ]
Установившаяся ошибка — это разница между желаемым конечным выходным сигналом и фактическим. [18] Поскольку для управления им требуется ненулевая ошибка, пропорциональный регулятор обычно работает с установившейся ошибкой. [а] Устойчивая ошибка (SSE) пропорциональна коэффициенту усиления процесса и обратно пропорциональна пропорциональному коэффициенту усиления. SSE можно смягчить, добавив компенсирующий член смещения к заданному значению И выходу, или скорректировать динамически, добавив интегральный член.
Интегральный термин [ править ]

Вклад интегрального члена пропорционален как величине ошибки, так и ее продолжительности. Интеграл в ПИД - регуляторе представляет собой сумму мгновенной ошибки с течением времени и дает накопленное смещение, которое должно было быть скорректировано ранее. Накопленная ошибка затем умножается на интегральный коэффициент усиления ( K i ) и добавляется к выходному сигналу контроллера.
Интегральный член определяется выражением

Интегральный член ускоряет движение процесса к заданному значению и устраняет остаточную установившуюся ошибку, возникающую при использовании чисто пропорционального регулятора. Однако, поскольку интегральная составляющая реагирует на накопленные в прошлом ошибки, это может привести к тому, что текущее значение выйдет за пределы заданного значения (см. раздел «Настройка контура »).
Производный термин [ править ]

Производная ошибки процесса вычисляется путем определения наклона ошибки во времени и умножения этой скорости изменения на коэффициент усиления производной K d . Величина вклада производной составляющей в общее управляющее воздействие называется коэффициентом усиления производной, K d .
Производный член определяется выражением

Производное действие прогнозирует поведение системы и, таким образом, улучшает время установления и стабильность системы. [19] [20] Идеальная производная не является причинно-следственной , поэтому реализации ПИД-регуляторов включают дополнительную фильтрацию нижних частот для производной, чтобы ограничить высокочастотное усиление и шум. Однако производное действие редко используется на практике – по одной оценке, только в 25% развернутых контроллеров. [ нужна ссылка ] – из-за его переменного влияния на стабильность системы в реальных приложениях.
Циклическая настройка [ править ]
Настройка контура управления представляет собой настройку его параметров управления (зона пропорционального усиления/усиления, интегральное усиление/сброс, производное усиление/скорость) до оптимальных значений для желаемой реакции управления. Стабильность (отсутствие неограниченных колебаний) является основным требованием, но помимо этого разные системы имеют разное поведение, разные приложения имеют разные требования, и требования могут конфликтовать друг с другом.
Несмотря на то, что существует только три параметра и в принципе это просто описать, настройка ПИД-регулятора представляет собой сложную проблему, поскольку она должна удовлетворять сложным критериям в пределах ограничений ПИД-регулирования . Соответственно, существуют различные методы настройки контура, а более сложные методы являются предметом патентов; в этом разделе описаны некоторые традиционные ручные методы настройки контура.
Проектирование и настройка ПИД-регулятора концептуально интуитивно понятны, но на практике могут оказаться трудными, если необходимо достичь нескольких (и часто противоречивых) целей, таких как короткие переходные процессы и высокая стабильность. ПИД-регуляторы часто обеспечивают приемлемое управление с использованием настроек по умолчанию, но производительность обычно можно улучшить путем тщательной настройки, а производительность может быть неприемлемой при плохой настройке. Обычно первоначальные проекты необходимо неоднократно корректировать с помощью компьютерного моделирования до тех пор, пока система с замкнутым контуром не будет работать или не пойдет на компромисс по желанию.
Некоторые процессы обладают определенной степенью нелинейности , поэтому параметры, которые хорошо работают в условиях полной нагрузки, не работают, когда процесс запускается без нагрузки. Это можно исправить путем планирования усиления (с использованием разных параметров в разных рабочих регионах).
Стабильность [ править ]
Если параметры ПИД-регулятора (коэффициенты пропорционального, интегрального и производного коэффициентов) выбраны неправильно, входной сигнал управляемого процесса может быть нестабильным; т. е. его выходной сигнал расходится или без них , с колебаниями , и ограничивается только насыщением или механическим поломкой. Нестабильность вызвана избыточным усилением, особенно при наличии значительного отставания.
Как правило, требуется стабилизация реакции, и процесс не должен колебаться при любой комбинации условий процесса и заданных значений, хотя иногда предельная стабильность (ограниченные колебания) приемлема или желательна. [ нужна ссылка ]
Математически истоки нестабильности можно увидеть в области Лапласа . [21]
Передаточная функция с обратной связью

где - передаточная функция ПИД-регулятора, а – передаточная функция объекта. Система неустойчива , если передаточная функция замкнутого контура расходится для некоторого . [21] Это происходит в ситуациях, когда . Другими словами, это происходит, когда со сдвигом фазы 180°. Стабильность гарантируется, если для частот с большими фазовыми сдвигами. Более общий формализм этого эффекта известен как критерий устойчивости Найквиста .





Оптимальное поведение [ править ]
Оптимальное поведение при изменении процесса или заданного значения варьируется в зависимости от приложения.
Двумя основными требованиями являются регулирование (подавление помех – сохранение заданного заданного значения) и отслеживание команд (осуществление изменений заданного значения). Эти термины относятся к тому, насколько хорошо контролируемая переменная отслеживает желаемое значение. Конкретные критерии отслеживания команд включают время нарастания и время стабилизации . Некоторые процессы не должны допускать выхода переменной процесса за пределы заданного значения, если это, например, небезопасно. Другие процессы должны минимизировать энергию, затрачиваемую на достижение новой заданной точки.
Обзор методов настройки [ править ]
Существует несколько методов настройки контура ПИД. Наиболее эффективные методы обычно включают разработку той или иной модели процесса и последующий выбор P, I и D на основе параметров динамической модели. Методы ручной настройки могут занять относительно много времени, особенно для систем с большим временем цикла.
Выбор метода во многом зависит от того, можно ли отключить контур для настройки, а также от времени отклика системы. Если систему можно перевести в автономный режим, лучший метод настройки часто включает в себя подвергание системы ступенчатому изменению входных данных, измерение выходного сигнала как функции времени и использование этой реакции для определения параметров управления. [ нужна ссылка ]
| Метод | Преимущества | Недостатки |
|---|---|---|
| Ручная настройка | Никакой математики не требуется; онлайн. | Это итеративная, основанная на опыте процедура проб и ошибок, которая может занять относительно много времени. Операторы могут обнаружить «плохие» параметры без соответствующей подготовки. [22] |
| Зиглер-Николс | Онлайн-настройка без параметров настройки, поэтому ее легко развернуть. | При настройке могут возникнуть сбои в процессе, которые могут привести к очень агрессивным параметрам. Плохо работает с процессами с задержкой. [ нужна ссылка ] |
| Тайреус Луйбен | Онлайн-настройка, расширение метода Циглера-Николса, которое, как правило, менее агрессивно. | При настройке могут возникнуть сбои в процессе; оператору необходимо выбрать параметр метода, который требует понимания. |
| Программные инструменты | Последовательный тюнинг; проектирования автоматизированных систем управления ( CAutoD онлайн или оффлайн – можно использовать методы ); может включать анализ клапана и датчика; позволяет моделировать перед загрузкой; может поддерживать нестационарную настройку (NSS). | «Настройка черного ящика», требующая указания цели, описывающей оптимальное поведение. |
| Коэн-Кун | Хорошие модели процессов [ нужна ссылка ] . | Оффлайн; хорош только для процессов первого порядка. [ нужна ссылка ] |
| Острем-Хегглунд | В отличие от метода Циглера-Николса, это не создает риска нестабильности петли. Требуются небольшие предварительные знания процесса. [23] | Может давать чрезмерное производное действие и вялую реакцию. Более поздние расширения решают эти проблемы, но требуют более сложной процедуры настройки. [23] |
| Простое правило управления (SIMC) | Получено аналитически, работает с процессами с задержкой по времени, имеет дополнительный параметр настройки, обеспечивающий дополнительную гибкость. Настройка может быть выполнена с помощью модели переходного процесса. [22] | Офлайн-метод; нельзя применить к колебательным процессам. Оператор должен выбрать дополнительный параметр настройки. [22] |
Ручная настройка [ править ]
Если система должна оставаться в сети, одним из методов настройки является сначала установка и значения к нулю. Увеличьте до тех пор, пока выходной сигнал контура не начнет колебаться; затем установите примерно до половины этого значения для ответа типа «затухание четверти амплитуды». Затем увеличьте до тех пор, пока любое смещение не будет исправлено за достаточное для процесса время, но не до тех пор, пока слишком большое значение не вызовет нестабильность. Наконец, увеличьте , если необходимо, до тех пор, пока контур не достигнет заданного значения после нарушения нагрузки достаточно быстро. Слишком вызывает чрезмерную реакцию и перерегулирование. Быстрая настройка контура ПИД-регулятора обычно слегка выходит за пределы диапазона, чтобы быстрее достичь заданного значения; однако некоторые системы не допускают перерегулирования, и в этом случае с сверхдемпфированием , что, в свою очередь, требует требуется система с замкнутым контуром установка значительно меньше, чем половина от настройку, которая вызывала колебания. [ нужна ссылка ]




| Параметр | Время подъема | Перерегулирование | Время урегулирования | Устойчивая ошибка | Стабильность |
|---|---|---|---|---|---|
| Снижаться | Увеличивать | Небольшое изменение | Снижаться | Деградировать | |
| Снижаться | Увеличивать | Увеличивать | Устранять | Деградировать | |
| Незначительное изменение | Снижаться | Снижаться | Теоретически эффекта нет | Улучшить, если маленький |
Метод Циглера-Николса [ править ]
Другой эвристический метод настройки известен как метод Циглера-Николса , предложенный Джоном Г. Зиглером и Натаниэлем Б. Николсом в 1940-х годах. Как и в вышеописанном методе, и прибыль сначала устанавливается на ноль. Пропорциональный коэффициент усиления увеличивается до тех пор, пока не достигнет конечного коэффициента усиления. при котором выходной сигнал контура начинает постоянно колебаться. и период колебаний используются для определения выигрыша следующим образом:


| Тип управления | |||
|---|---|---|---|
| П | — | — | |
| ПИ | — | ||
| ПИД-регулятор |






Эти коэффициенты усиления применимы к идеальной параллельной форме ПИД-регулятора. При применении к стандартной форме ПИД-регулятора увеличивается только интеграл и производная. и зависят от периода колебаний .
Параметры Коэна-Куна [ править ]
Этот метод был разработан в 1953 году и основан на модели первого порядка + временная задержка. Подобно методу Циглера-Николса , набор параметров настройки был разработан для получения отклика с обратной связью с коэффициентом затухания . Вероятно, самая большая проблема с этими параметрами заключается в том, что небольшое изменение параметров процесса потенциально может привести к нестабильности замкнутой системы.

(Острем-Хегглунд Релейный ) метод
Опубликовано в 1984 году Карлом Йоханом Остремом и Торе Хэгглундом. [26] релейный метод временно управляет процессом, используя релейный контроль , и измеряет результирующие колебания. Выход переключается (как с помощью реле , отсюда и название) между двумя значениями управляющей переменной. Значения должны быть выбраны так, чтобы процесс пересекал заданное значение, но они не обязательно должны быть 0% и 100%; выбрав подходящие значения, можно избежать опасных колебаний.
Пока переменная процесса находится ниже заданного значения, выход управления устанавливается на более высокое значение. Как только оно поднимается выше заданного значения, выход управления устанавливается на более низкое значение. В идеале выходной сигнал имеет почти прямоугольную форму и проводит одинаковое время выше и ниже заданного значения. Период и амплитуда результирующих колебаний измеряются и используются для расчета конечного усиления и периода, которые затем вводятся в метод Циглера-Николса.
В частности, последний период предполагается равным наблюдаемому периоду, а конечный выигрыш рассчитывается как где a — амплитуда колебаний технологической переменной, а b — амплитуда вызвавшего их изменения управляющего выхода.

Существует множество вариантов релейного метода. [27]
первого порядка с мертвым временем Модель
Передаточная функция для процесса первого порядка с мертвым временем равна

где k p — коэффициент усиления процесса, τ p — постоянная времени, θ — мертвое время, а u ( s ) — вход ступенчатого изменения. Преобразование этой передаточной функции во временную область приводит к

используя те же параметры, что и выше.
При использовании этого метода важно применять достаточно большой входной сигнал ступенчатого изменения, чтобы можно было измерить выходной сигнал; однако слишком большое ступенчатое изменение может повлиять на стабильность процесса. Кроме того, больший шаг изменения гарантирует, что выходной сигнал не изменится из-за помех (для достижения наилучших результатов постарайтесь минимизировать помехи при выполнении пошагового теста).
Одним из способов определения параметров процесса первого порядка является использование метода 63,2%. В этом методе выигрыш процесса ( k p ) равен изменению выхода, деленному на изменение входа. Мертвое время θ — это промежуток времени между моментом ступенчатого изменения и моментом первого изменения выходного сигнала. Постоянная времени ( τ p ) — это количество времени, необходимое для того, чтобы выходной сигнал достиг 63,2% от нового установившегося значения после ступенчатого изменения. Недостатком использования этого метода является то, что достижение нового установившегося значения может занять некоторое время, если процесс имеет большие постоянные времени. [28]
Программное обеспечение для настройки [ править ]
Большинство современных промышленных предприятий больше не настраивают контуры, используя методы ручного расчета, показанные выше. Вместо этого используется программное обеспечение для настройки ПИД-регулятора и оптимизации контура для обеспечения стабильных результатов. Эти пакеты программного обеспечения собирают данные, разрабатывают модели процессов и предлагают оптимальную настройку. Некоторые пакеты программного обеспечения могут даже разрабатывать настройку, собирая данные об эталонных изменениях.
Математическая настройка контура ПИД-регулятора создает импульс в системе, а затем использует частотную характеристику управляемой системы для расчета значений контура ПИД-регулятора. В контурах со временем отклика в несколько минут рекомендуется математическая настройка контура, поскольку поиск стабильного набора значений контура методом проб и ошибок может занять несколько дней. Оптимальные значения найти труднее. Некоторые цифровые контроллеры контура имеют функцию самонастройки, при которой в процесс передаются очень небольшие изменения уставки, что позволяет контроллеру самому рассчитать оптимальные значения настройки.
Другой подход рассчитывает начальные значения с помощью метода Циглера-Николса и использует метод численной оптимизации для поиска лучших коэффициентов ПИД. [29]
Доступны и другие формулы для настройки контура в соответствии с различными критериями производительности. Многие запатентованные формулы теперь встроены в программные и аппаратные модули ПИД-регулирования. [30]
Достижения в области автоматизированного программного обеспечения для настройки контуров ПИД также предоставляют алгоритмы для настройки контуров ПИД в динамическом или нестационарном режиме (NSS). Программное обеспечение моделирует динамику процесса посредством возмущения и в ответ рассчитывает параметры ПИД-регулирования. [31]
Ограничения [ править ]
Хотя ПИД-регуляторы применимы для решения многих задач управления и часто работают удовлетворительно без каких-либо улучшений или только грубой настройки, в некоторых приложениях они могут работать плохо и в целом не обеспечивают оптимального управления . Основная трудность ПИД-регулирования заключается в том, что это система управления с обратной связью, с постоянными параметрами и без прямого знания процесса, поэтому общая производительность является реактивной и компромиссной. Хотя ПИД-регулятор является лучшим регулятором для наблюдателя без модели процесса, лучшую производительность можно получить, открыто моделируя участника процесса, не прибегая к помощи наблюдателя.
ПИД-регуляторы, используемые отдельно, могут давать плохую производительность, когда коэффициенты усиления ПИД-контура необходимо уменьшить, чтобы система управления не превышала, не колебалась и не колебалась вокруг значения уставки управления. Они также испытывают трудности с наличием нелинейностей, могут выбирать между регулированием и временем реакции, не реагируют на изменение поведения процесса (скажем, процесс меняется после прогрева) и имеют задержку в реагировании на большие возмущения.
Наиболее значительным улучшением является включение упреждающего управления со знаниями о системе и использование ПИД-регулятора только для контроля ошибок. В качестве альтернативы, ПИД-регуляторы можно модифицировать более незначительными способами, например, путем изменения параметров (либо планирования усиления в различных случаях использования, либо их адаптивного изменения в зависимости от производительности), улучшения измерения (более высокая частота дискретизации, точность и аккуратность, а также низкочастотный фильтр). фильтрация при необходимости) или каскадирование нескольких ПИД-регуляторов.
Линейность и симметрия [ править ]
ПИД-регуляторы работают лучше всего, когда управляемый контур является линейным и симметричным. Таким образом, их производительность в нелинейных и асимметричных системах ухудшается.
Нелинейный клапан, например, в системе управления потоком, приведет к переменной чувствительности контура, что потребует демпфирования действия для предотвращения нестабильности. Одним из решений является использование нелинейной характеристики клапана в алгоритме управления для компенсации этого.
Например, асимметричным применением является регулирование температуры в системах отопления, вентиляции и кондиционирования воздуха с использованием только активного нагрева (через нагревательный элемент), где доступно только пассивное охлаждение. Когда необходимо снизить контролируемую температуру, выход нагрева отключается, но активное охлаждение не происходит из-за выхода управления. Поэтому любое превышение температуры можно корректировать лишь медленно; его нельзя принудительно снизить с помощью управляющего выхода. В этом случае ПИД-регулятор можно настроить на сверхдемпфирование, чтобы предотвратить или уменьшить перерегулирование, но это снижает производительность за счет увеличения времени установления повышения температуры до заданного значения. Неизбежное ухудшение качества управления в этом приложении можно решить путем применения активного охлаждения.
Шум в производной термине [ править ]
Проблема с производной частью состоит в том, что она усиливает измерения на более высоких частотах или шум процесса , что может вызвать значительные изменения выходного сигнала. Часто бывает полезно отфильтровать измерения с помощью фильтра нижних частот , чтобы удалить высокочастотные компоненты шума. Поскольку фильтрация нижних частот и управление производной могут нейтрализовать друг друга, объем фильтрации ограничен. Поэтому важно использовать малошумящие приборы. нелинейный медианный фильтр , который повышает эффективность фильтрации и практические характеристики. Можно использовать [32] В некоторых случаях дифференциальный диапазон можно отключить с небольшой потерей контроля. Это эквивалентно использованию ПИД-регулятора в качестве ПИ-регулятора .
Модификации алгоритма [ править ]
Базовый алгоритм ПИД создает некоторые проблемы в приложениях управления, которые решаются путем незначительных модификаций формы ПИД.
Интегральное завершение [ править ]
Одной из распространенных проблем, возникающих в результате идеальных реализаций PID, является интегральное завершение работы . После значительного изменения уставки интегральная составляющая может накапливать ошибку, превышающую максимальное значение регулируемой переменной (завершение), таким образом, система выходит за пределы и продолжает увеличиваться до тех пор, пока эта накопленная ошибка не будет устранена. Эту проблему можно решить:
- Отключение интеграции до момента входа ФВ в контролируемую область
- Предотвращение накопления интегрального члена выше или ниже заранее определенных границ
- Обратный расчет интегрального члена для ограничения выходного сигнала регулятора в допустимых пределах. [33]
Промахи от известных помех [ править ]
Например, контур ПИД используется для управления температурой электрической печи сопротивления, где система стабилизировалась. Теперь, когда дверь открывается и в печь помещается что-то холодное, температура падает ниже заданного значения. Интегральная функция контроллера стремится компенсировать ошибку, вводя еще одну ошибку в положительном направлении. Этого превышения можно избежать, заморозив интегральную функцию после открытия дверцы на время, которое обычно требуется контуру управления для повторного нагрева печи.
ПИ-регулятор [ править ]

ПИ -регулятор (пропорционально-интегральный регулятор) — это частный случай ПИД-регулятора, в котором не используется производная (D) ошибки.
Выход контроллера определяется выражением

где это погрешность или отклонение фактического измеренного значения ( PV ) от заданного значения ( SP ).


ПИ-регулятор можно легко смоделировать в таком программном обеспечении, как Simulink или Xcos, используя блок-схему с участием операторов Лапласа :

где
- = пропорциональный выигрыш
- = интегральный выигрыш


Установка значения для часто является компромиссом между уменьшением перерегулирования и увеличением времени стабилизации.

Отсутствие производного действия может сделать систему более устойчивой в установившемся состоянии в случае зашумленных данных. Это связано с тем, что производное действие более чувствительно к более часто встречающимся входным параметрам.
Без производного действия система с ПИ-регулированием менее реагирует на реальные (нешумовые) и относительно быстрые изменения состояния, поэтому система будет медленнее достигать заданного значения и медленнее реагировать на возмущения, чем может быть хорошо настроенная ПИД-система. .
Мертвая зона [ править ]
Многие контуры ПИД управляют механическим устройством (например, клапаном). Техническое обслуживание механического оборудования может потребовать больших затрат, а износ приводит к ухудшению управления в виде заедания или люфта в механической реакции на входной сигнал. Скорость механического износа в основном зависит от того, как часто устройство активируется для внесения изменений. Если износ является серьезной проблемой, контур ПИД-регулятора может иметь зону нечувствительности на выходе для уменьшения частоты активации выхода (клапана). Это достигается путем модификации контроллера, чтобы его выходной сигнал оставался стабильным, если изменение будет небольшим (в пределах определенного диапазона мертвой зоны). Рассчитанный выходной сигнал должен выйти за пределы зоны нечувствительности, прежде чем фактический выходной сигнал изменится.
Шаг изменения уставки [ изменить ]
Пропорциональные и производные члены могут привести к чрезмерному изменению выходного сигнала, когда система подвергается мгновенному ступенчатому увеличению ошибки, например, при значительном изменении заданного значения. В случае производного члена это связано с взятием производной ошибки, которая очень велика в случае мгновенного ступенчатого изменения. В результате некоторые алгоритмы ПИД включают некоторые из следующих модификаций:
- Увеличение уставки
- В этой модификации уставка постепенно перемещается от своего старого значения к новому заданному значению с использованием линейной функции или функции дифференциального линейного изменения первого порядка. Это позволяет избежать разрыва, присутствующего при простом ступенчатом изменении.
- Производная переменной процесса
- В этом случае ПИД-регулятор измеряет производную измеренной переменной PV, а не производную ошибки. Эта величина всегда непрерывна (т.е. никогда не имеет ступенчатого изменения в результате изменения заданного значения). Эта модификация представляет собой простой случай взвешивания заданного значения.
- Взвешивание заданного значения
- Взвешивание уставки добавляет регулируемые коэффициенты (обычно от 0 до 1) к уставке ошибки в пропорциональном и производном элементе контроллера. Ошибка в интегральном члене должна быть истинной ошибкой управления, чтобы избежать установившихся ошибок управления. Эти два дополнительных параметра не влияют на реакцию на возмущения нагрузки и шум измерения и могут быть настроены для улучшения реакции контроллера на заданное значение.
Упреждение [ править ]
Производительность системы управления можно улучшить, объединив управление с обратной связью (или с обратной связью) ПИД-регулятора с управлением с прямой связью (или с разомкнутым контуром). Знания о системе (например, желаемое ускорение и инерция) можно передавать вперед и объединять с выходными данными ПИД-регулятора для улучшения общей производительности системы. Одно только значение прямой связи часто может обеспечить большую часть выходного сигнала контроллера. ПИД-регулятор в первую очередь должен компенсировать любую разницу или ошибку, остающуюся между уставкой (SP) и реакцией системы на управление с разомкнутым контуром. Поскольку на выходной сигнал прямой связи не влияет обратная связь процесса, он никогда не может вызвать колебания системы управления, тем самым улучшая реакцию системы, не влияя на стабильность. Упреждающая связь может основываться на заданном значении и на дополнительных измеренных возмущениях. Взвешивание заданного значения — это простая форма прямой связи.
Например, в большинстве систем управления движением для ускорения контролируемой механической нагрузки от привода требуется большее усилие. Если ПИД-регулятор с контуром скорости используется для управления скоростью нагрузки и управления силой, прикладываемой приводом, то полезно взять желаемое мгновенное ускорение, соответствующим образом масштабировать это значение и добавить его к выходному сигналу ПИД-регулятора. контроллер контура скорости. Это означает, что всякий раз, когда нагрузка ускоряется или замедляется, от привода подается пропорциональная сила независимо от значения обратной связи. ПИД-контур в этой ситуации использует информацию обратной связи для изменения объединенного выходного сигнала, чтобы уменьшить оставшуюся разницу между уставкой процесса и значением обратной связи. Работая вместе, комбинированный регулятор с прямой связью с разомкнутым контуром и ПИД-регулятор с замкнутым контуром могут обеспечить более отзывчивую систему управления.
Безударная работа [ править ]
ПИД-регуляторы часто реализуются с функцией «безударной» инициализации, которая пересчитывает интегральный член аккумулятора для поддержания согласованного выходного сигнала процесса посредством изменения параметров. [34] Частичная реализация заключается в сохранении интегрального коэффициента усиления, умноженного на ошибку, вместо сохранения ошибки и последующего умножения на интегральный коэффициент усиления, что предотвращает прерывистый выходной сигнал при изменении коэффициента усиления I, но не коэффициентов усиления P или D.
Другие улучшения [ править ]
Помимо прямой связи, ПИД-регуляторы часто улучшаются с помощью таких методов, как планирование усиления ПИД-регулятора (изменение параметров в различных рабочих условиях), нечеткая логика или вычислительная глагольная логика. [35] [36] Дальнейшие практические проблемы применения могут возникнуть из-за приборов, подключенных к контроллеру. Для достижения адекватных характеристик управления необходимы достаточно высокая частота дискретизации, прецизионность и достоверность измерений. Еще одним новым методом улучшения ПИД-регулятора является увеличение степени свободы за счет использования дробного порядка . Порядок интегратора и дифференциатора повышает гибкость контроллера. [37]
Каскадное управление [ править ]
Одним из отличительных преимуществ ПИД-регуляторов является то, что два ПИД-регулятора можно использовать вместе для достижения лучших динамических характеристик. Это называется каскадным ПИД-регулированием. Два регулятора находятся в каскаде, если они расположены так, что один регулирует заданное значение другого. ПИД-регулятор действует как контроллер внешнего контура, который управляет основным физическим параметром, таким как уровень жидкости или скорость. Другой контроллер действует как контроллер внутреннего контура, который считывает выходной сигнал контроллера внешнего контура в качестве заданного значения, обычно управляя более быстро изменяющимся параметром, расходом или ускорением. Это можно доказать математически [ нужна ссылка ] что рабочая частота регулятора увеличивается, а постоянная времени объекта уменьшается за счет использования каскадных ПИД-регуляторов. [ нечеткий ] .
Например, циркуляционная ванна с регулируемой температурой имеет два каскадных ПИД-регулятора, каждый из которых оснащен собственным датчиком температуры с термопарой . Внешний контроллер контролирует температуру воды с помощью термопары, расположенной вдали от нагревателя, где он точно считывает температуру основной массы воды. Погрешность этого ПИД-регулятора представляет собой разницу между желаемой температурой ванны и измеренной температурой. Вместо непосредственного управления нагревателем внешний ПИД-регулятор устанавливает целевую температуру нагревателя для внутреннего ПИД-регулятора. Внутренний ПИД-регулятор контролирует температуру нагревателя с помощью термопары, прикрепленной к нагревателю. Погрешность внутреннего контроллера представляет собой разницу между заданным значением температуры нагревателя и измеренной температурой нагревателя. Его выход управляет фактическим нагревателем, чтобы он оставался вблизи этой уставки.
Пропорциональные, интегральные и дифференциальные условия двух регуляторов будут сильно различаться. Внешний ПИД-регулятор имеет большую постоянную времени – вся вода в резервуаре должна нагреваться или охлаждаться. Внутренний цикл реагирует гораздо быстрее. системы Каждый контроллер можно настроить в соответствии с физикой управляемой им – теплопередачей и тепловой массой всего резервуара или только нагревателя – что обеспечивает лучший общий отклик. [38] [39]
и Альтернативная формы номенклатура
Стандартная и параллельная ( форма идеальная )
Форма ПИД-регулятора, наиболее часто встречающаяся в промышленности, и наиболее актуальная для алгоритмов настройки, — это стандартная форма . В этой форме усиление применяется к , и условиях, что дает:



где
- это интегральное время
- это производное время


В этой стандартной форме параметры имеют ясный физический смысл. В частности, внутреннее суммирование дает новое значение одиночной ошибки, которое компенсируется будущими и прошлыми ошибками. Пропорциональная ошибка – это текущая ошибка. Термин производные компоненты пытается предсказать значение ошибки при секунд (или выборок) в будущем, предполагая, что управление контуром останется неизменным. Интегральный компонент корректирует значение ошибки, чтобы компенсировать сумму всех прошлых ошибок с целью полного их устранения в будущем. секунды (или образцы). Результирующее значение компенсированной одиночной ошибки затем масштабируется с помощью одиночного коэффициента усиления. для вычисления управляющей переменной.
В параллельной форме, показанной в разделе теории контроллера.

параметры усиления связаны с параметрами стандартной формы через и . Эта параллельная форма, в которой параметры рассматриваются как простые коэффициенты усиления, является наиболее общей и гибкой формой. Однако это также форма, в которой параметры имеют самую слабую связь с физическим поведением и обычно используются для теоретической обработки ПИД-регулятора. Стандартная форма, несмотря на то, что она несколько сложнее математически, более распространена в промышленности.


Взаимное усиление, также известное как пропорциональная полоса [ править ]
Во многих случаях выходная переменная ПИД-регулятора представляет собой безразмерную долю от 0 до 100 % от некоторого максимально возможного значения, а перевод в реальные единицы (например, скорость откачки или мощность нагревателя в ваттах) находится за пределами ПИД-регулятора. Однако переменная процесса выражается в таких единицах измерения, как температура. В этом случае принято выражать выигрыш не как «выработка на градус», а скорее в обратной форме зоны пропорциональности , что означает «градусы на полный выходной сигнал»: диапазон, в котором выходной сигнал изменяется от 0 до 1 (от 0% до 100%). За пределами этого диапазона выходной сигнал является насыщенным, полностью выключенным или полностью включенным. Чем уже эта полоса, тем выше пропорциональный выигрыш.

на производного действия Основание PV
В большинстве коммерческих систем управления производное действие основано на переменной процесса, а не на ошибке. То есть изменение уставки не влияет на производное действие. Это связано с тем, что оцифрованная версия алгоритма создает большой нежелательный всплеск при изменении заданного значения. Если уставка постоянна, то изменения PV будут такими же, как и изменения ошибки. Следовательно, эта модификация не влияет на то, как контроллер реагирует на нарушения технологического процесса.
действия на PV Основание пропорционального
Большинство коммерческих систем управления предлагают возможность основывать пропорциональное действие исключительно на переменной процесса. Это означает, что на изменения заданного значения реагирует только интегральное действие. Модификация алгоритма не влияет на реакцию контроллера на нарушения технологического процесса. Использование пропорционального действия на основе переменной PV исключает мгновенное и, возможно, очень большое изменение выходной мощности, вызванное внезапным изменением уставки. В зависимости от процесса и настройки это может быть полезно для реакции на шаг заданного значения.

Король [40] описывает эффективный метод, основанный на диаграммах.
Форма Лапласа [ править ]
Иногда полезно записать ПИД-регулятор в форме преобразования Лапласа :

Наличие ПИД-регулятора, написанного в форме Лапласа, и наличие передаточной функции управляемой системы позволяет легко определить передаточную функцию системы с обратной связью.
Серия/взаимодействующая форма [ править ]
Другим представлением ПИД-регулятора является серия или взаимодействующая форма.

где параметры связаны с параметрами стандартной формы через
- , , и



с
- .

Эта форма по существу состоит из последовательно соединенных PD и PI-регулятора. Поскольку для расчета смещения контроллера требуется интеграл, эта форма обеспечивает возможность отслеживать значение внешнего смещения, которое необходимо использовать для правильной реализации схем расширенного управления с несколькими контроллерами.
Дискретная реализация [ править ]
Анализ проектирования цифровой реализации ПИД-регулятора в микроконтроллере (MCU) или устройстве FPGA стандартной формы ПИД-регулятора требует дискретизации . [41] Приближения для производных первого порядка производятся обратными конечными разностями . и дискретизируются с периодом выборки , k – индекс выборки.

Дифференцирование обеих частей уравнения ПИД с использованием обозначений Ньютона дает:

Производные члены аппроксимируются как:

Так,

Повторное применение обратной разницы дает:

Путем упрощения и перегруппировки членов приведенного выше уравнения наконец получается алгоритм реализации дискретного ПИД-регулятора в микроконтроллере:

или:
![{\displaystyle u(t_{k})=u(t_{k-1})+K_{p}\left[\left(1+{\dfrac {\Delta t}{T_{i}}}+{ \dfrac {T_{d}}{\Delta t}}\right)e(t_{k})+\left(-1-{\dfrac {2T_{d}}{\Delta t}}\right)e (t_{k-1})+{\dfrac {T_{d}}{\Delta t}}e(t_{k-2})\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e71fa41e1c58fcef6f2a3a4118577458ce29c659)
ул.

Примечание. Этот метод фактически решает где является константой, не зависящей от t. Эта константа полезна, если вы хотите иметь возможность управления запуском и остановкой контура регулирования. Например, установка Kp, Ki и Kd на 0 сохранит константу u(t). Аналогично, если вы хотите запустить регулирование в системе, где ошибка уже близка к 0, а u(t) не равно нулю, это не позволяет отправить выходной сигнал в 0.


Псевдокод [ править ]
Вот очень простая и явная группа псевдокода, которую легко понять непрофессионалу: [ нужна ссылка ]
- КП – пропорциональное усиление
- Ки – интегральный коэффициент усиления
- Kd - производная прибыль
- dt - время интервала цикла (предполагается разумный масштаб) [б]
previous_error := 0 integral := 0 loop: error := setpoint − measured_value proportional := error; integral := integral + error × dt derivative := (error − previous_error) / dt output := Kp × proportional + Ki × integral + Kd × derivative previous_error := error wait(dt) goto loop
Ниже псевдокод иллюстрирует, как реализовать PID, рассматривая PID как БИХ -фильтр:
ПИД Z-преобразование -регулятора можно записать как ( время выборки):


и выражено в форме IIR (в соответствии с дискретной реализацией, показанной выше):

Затем мы можем вывести рекурсивную итерацию, часто встречающуюся в реализации FPGA. [42]
![{\displaystyle u[n]=u[n-1]+\left(K_{p}+K_{i}\Delta _{t}+{\dfrac {K_{d}}{\Delta _{t} }}\right)\epsilon [n]+\left(-K_{p}-{\dfrac {2K_{d}}{\Delta _{t}}}\right)\epsilon [n-1]+{ \dfrac {K_{d}}{\Delta _{t}}}\epsilon [n-2]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5a1135841f70c0c0173ec9271971f6bea3c20830)
A0 := Kp + Ki*dt + Kd/dt
A1 := -Kp - 2*Kd/dt
A2 := Kd/dt
error[2] := 0 // e(t-2)
error[1] := 0 // e(t-1)
error[0] := 0 // e(t)
output := u0 // Usually the current value of the actuator
loop:
error[2] := error[1]
error[1] := error[0]
error[0] := setpoint − measured_value
output := output + A0 * error[0] + A1 * error[1] + A2 * error[2]
wait(dt)
goto loop
Здесь Kp – безразмерное число, Ki выражается в и Kd выражается в с. При регулировании, при котором привод и измеренное значение имеют разные единицы измерения (например, регулирование температуры с помощью двигателя, управляющего клапаном), Kp, Ki и Kd могут быть скорректированы с помощью коэффициента преобразования единиц. Также может быть интересно использовать Ki в его обратной форме (время интегрирования). Вышеупомянутая реализация позволяет реализовать контроллер только I, который может быть полезен в некоторых случаях.

В реальном мире это цифро-аналоговое преобразование и передача в контролируемый процесс в качестве управляющей переменной (MV). Текущая ошибка сохраняется в другом месте для повторного использования при следующем дифференцировании, затем программа ждет, пока с момента запуска не пройдет dt секунд, и цикл начинается снова, считывая новые значения для PV и уставки и вычисляя новое значение для ошибка. [43]
Обратите внимание, что для реального кода использование «wait(dt)» может быть неуместным, поскольку оно не учитывает время, затраченное самим алгоритмом во время цикла, или, что более важно, любое упреждение, задерживающее работу алгоритма.
Распространенная проблема при использовании это реакция на производную нарастающего или спадающего фронта уставки, как показано ниже:

Типичным обходным решением является фильтрация производного действия с использованием фильтра нижних частот с постоянной времени. где :


Вариант приведенного выше алгоритма с использованием фильтра с бесконечной импульсной характеристикой (БИХ) для производной:
A0 := Kp + Ki*dt
A1 := -Kp
error[2] := 0 // e(t-2)
error[1] := 0 // e(t-1)
error[0] := 0 // e(t)
output := u0 // Usually the current value of the actuator
A0d := Kd/dt
A1d := - 2.0*Kd/dt
A2d := Kd/dt
N := 5
tau := Kd / (Kp*N) // IIR filter time constant
alpha := dt / (2*tau)
d0 := 0
d1 := 0
fd0 := 0
fd1 := 0
loop:
error[2] := error[1]
error[1] := error[0]
error[0] := setpoint − measured_value
// PI
output := output + A0 * error[0] + A1 * error[1]
// Filtered D
d1 := d0
d0 := A0d * error[0] + A1d * error[1] + A2d * error[2]
fd1 := fd0
fd0 := ((alpha) / (alpha + 1)) * (d0 + d1) - ((alpha - 1) / (alpha + 1)) * fd1
output := output + fd0
wait(dt)
goto loop
См. также [ править ]
Примечания [ править ]
- ^ Единственным исключением является случай, когда целевое значение совпадает со значением, полученным, когда выходной сигнал контроллера равен нулю.
- ^ Обратите внимание, что для очень маленьких интервалов (например, 60 Гц/ секунд), результирующее значение производной будет чрезвычайно большим и на порядки больше, чем пропорциональная или целая составляющие. Корректировка этого значения для производной (например, умножение на 1000) или изменение деления на умножение, скорее всего, даст желаемые результаты. Это справедливо для всех представленных здесь псевдокодов.

Ссылки [ править ]
- ^ Араки, М. (2009). «Системы управления, робототехника и автоматизация – Том VII – ПИД-регулирование» (PDF) . Япония: Киотский университет.
- ^ «9.3: Настройка ПИД-регулятора классическими методами» . Инженерные библиотеки LibreTexts . 19 мая 2020 г. Проверено 31 мая 2024 г.
- ^ «Ремонт | Vickers US | Официальный сайт» . Пополнение запасов Vickers в США . Проверено 31 мая 2024 г.
- ^ Хиллз, Ричард Л. (1996), Сила ветра , издательство Кембриджского университета
- ^ Ричард Э. Беллман (8 декабря 2015 г.). Процессы адаптивного управления: экскурсия . Издательство Принстонского университета. ISBN 9781400874668 .
- ^ Jump up to: Перейти обратно: а б с д и ж Беннетт, Стюарт (1996). «Краткая история автоматического управления» (PDF) . Журнал IEEE Control Systems . 16 (3): 17–25. дои : 10.1109/37.506394 . Архивировано из оригинала (PDF) 9 августа 2016 г. Проверено 21 августа 2014 г.
- ^ Максвелл, Дж. К. (1868). «О губернаторах» (PDF) . Труды Королевского общества . 100 .
- ^ Ньюпауэр, Энтони (2006). Железные люди и оловянная рыбка: гонка за создание лучшей торпеды во время Второй мировой войны . Praeger Security International. ISBN 978-0-275-99032-9 . п. цитируя Грей, Эдвин (1991), Устройство дьявола: Роберт Уайтхед и история торпеды , Аннаполис, Мэриленд: Военно-морской институт США, стр. 33 .
- ^ Слиман, CW (1880), Торпеды и торпедная война , Портсмут: Griffin & Co., стр. 137–138,
что составляет то, что называют секретом рыбьей торпеды.
- ^ «Краткая история автоматизации зданий» . Архивировано из оригинала 8 июля 2011 г. Проверено 4 апреля 2011 г.
- ^ Минорский, Николя (1922). «Путеводительная устойчивость автоматически управляемых тел». Журнал Американского общества военно-морских инженеров . 34 (2): 280–309. дои : 10.1111/j.1559-3584.1922.tb04958.x .
- ^ Беннетт 1993 , с. 67
- ^ Беннетт, Стюарт (июнь 1986 г.). История техники управления, 1800-1930 гг . ИЭПП. стр. 142–148 . ISBN 978-0-86341-047-5 .
- ^ Шински, Ф. Грег (2004), Сила обратной связи внешнего сброса (PDF) , Control Global
- ^ Нейгауз, Рудольф. «Блокировка диодного лазера и сужение ширины линии» (PDF) . Проверено 8 июня 2015 г.
- ^ «Система позиционного контроля» (PDF) . Факультет электротехники и электроники Университета Хаджеттепе. Архивировано из оригинала (PDF) 13 мая 2014 г.
- ^ Кебриаи, Реза; Фришкорн, Ян; Риз, Стефани; Хусманн, Тобиас; Мейер, Хорст; Молл, Хейко; Тайзен, Вернер (2013). «Численное моделирование порошковых металлургических покрытий на кольцеобразных деталях, интегрированных с кольцевой прокаткой». Технология обработки материалов . 213 (1): 2015–2032. дои : 10.1016/j.jmatprotec.2013.05.023 .
- ^ Липтак, Бела Г. (2003). Справочник инженера по приборостроению: Управление процессами и оптимизация (4-е изд.). ЦРК Пресс. п. 108. ИСБН 0-8493-1081-4 .
- ^ «Введение: проектирование ПИД-регулятора» . Мичиганский университет.
- ^ Тим Уэскотт (октябрь 2000 г.). «ПИД без докторской степени» (PDF) . EE Times-Индия.
{{cite journal}}: Для цитирования журнала требуется|journal=( помощь ) - ^ Jump up to: Перейти обратно: а б Беххофер, Джон (2005). «Обратная связь для физиков: учебное эссе по управлению». Обзоры современной физики . 77 (3): 783–835. Бибкод : 2005РвМП...77..783Б . CiteSeerX 10.1.1.124.7043 . дои : 10.1103/revmodphys.77.783 .
- ^ Jump up to: Перейти обратно: а б с Скогестад, Сигурд (2003). «Простые аналитические правила для сокращения модели и настройки ПИД-регулятора» (PDF) .
- ^ Jump up to: Перейти обратно: а б «Обзор методов автонастройки реле для настройки регуляторов ПИД-типа» .
- ^ Киам Хеонг Анг; Чонг, Г.; Юн Ли (2005). «Анализ, проектирование и технология системы ПИД-управления» (PDF) . Транзакции IEEE по технологии систем управления . 13 (4): 559–576. дои : 10.1109/TCST.2005.847331 . S2CID 921620 .
- ^ Цзинхуа Чжун (весна 2006 г.). «Настройка ПИД-регулятора: краткое руководство» (PDF) . Архивировано из оригинала (PDF) 21 апреля 2015 г. Проверено 4 апреля 2011 г.
{{cite journal}}: Для цитирования журнала требуется|journal=( помощь ) - ^ Острем, К.Дж.; Хэгглунд, Т. (июль 1984 г.). «Автоматическая настройка простых регуляторов» . Тома трудов МФБ . 17 (2): 1867–1872. дои : 10.1016/S1474-6670(17)61248-5 .
- ^ Хорнси, Стивен (29 октября 2012 г.). «Обзор методов автонастройки реле для настройки регуляторов ПИД-типа» . Новое изобретение . 5 (2).
- ^ Бекетт, Б. Уэйн (2003). Управление процессами: моделирование, проектирование и симуляция . Река Аппер-Сэддл, Нью-Джерси: Прентис-Холл. п. 129. ИСБН 978-0-13-353640-9 .
- ^ Хейнянен, Ээро (октябрь 2018 г.). Метод автоматической настройки ПИД-регулятора после оптимизации Лууса-Яаколы (PDF) (под ред. Магистерской диссертации). Тампере, Финляндия: Технологический университет Тампере . Проверено 1 февраля 2019 г.
- ^ Ли, Юн; Анг, Киам Хеонг; Чонг, Грегори Сай (февраль 2006 г.). «Патенты, программное обеспечение и аппаратные средства для ПИД-регулирования: обзор и анализ современного уровня техники» (PDF) . Журнал IEEE Control Systems . 26 (1): 42–54. дои : 10.1109/MCS.2006.1580153 . S2CID 18461921 .
- ^ Солтес, Кристиан (январь 2012 г.). «Об автоматизации процедуры настройки ПИД» ( лицензиат ). Лундский университет . 847ca38e-93e8-4188-b3d5-8ec6c23f2132 .
- ^ Ли, Ю. и Анг, К.Х. и Чонг, GCY (2006)Анализ и проектирование системы ПИД-регулирования - проблемы, способы устранения и будущие направления . Журнал IEEE Control Systems, 26 (1). стр. 32-41. ISSN 0272-1708
- ^ Купер, Дуглас. «Интегральный (сброс) запуск, логика оболочки и форма PI скорости» . Проверено 18 февраля 2014 г.
- ^ Купер, Дуглас. «ПИ-регулирование теплообменника» . Практическое управление процессами от Control Guru . Проверено 27 февраля 2014 г.
- ^ Ян, Т. (июнь 2005 г.). «Архитектуры вычислительных глагольных контроллеров: на пути к новой парадигме интеллектуального управления». Международный журнал вычислительного познания . 3 (2): 74–101. CiteSeerX 10.1.1.152.9564 .
- ^ Лян, Илун; Ян, Тао (2009). «Управление печью для отжига топлива с помощью вычислительных глагольных ПИД-регуляторов» . Материалы 3-й Международной конференции по борьбе с контрафактной продукцией, безопасности и идентификации в сфере связи . Асид'09: 417–420. ISBN 9781424438839 .
- ^ Тенрейро Мачадо Дж.А. и др. (2009). «Некоторые применения дробного исчисления в технике» . Математические проблемы в технике . 2010 : 1–34. дои : 10.1155/2010/639801 . hdl : 10400.22/4306 .
- ^ [1] Основы каскадного управления | Иногда два контроллера могут лучше поддерживать одну переменную процесса там, где вы хотите. | Вэнс ВанДорен, доктор философии, PE | 17 АВГУСТА 2014 ГОДА
- ^ [2] | Преимущества каскадного управления | 22 сентября 2020 г. | Уотлоу
- ^ Кинг, Майк (2011). Управление процессами: практический подход . Уайли. стр. 52–78. ISBN 978-0-470-97587-9 .
- ^ «Проектирование и анализ дискретных ПИ- и ПИД-регуляторов для цифровой реализации» . Scribd.com . Проверено 4 апреля 2011 г.
- ^ Тхакур, Бхушана. Аппаратная реализация [так в оригинале] ПИД-регулятора на базе FPGA (PDF) .
- ^ «ПИД-управление процессом, пример «Круиз-контроля»» . КодПроект. 2009 . Проверено 4 ноября 2012 г.
- Бекетт, Б. Уэйн (2006). Управление процессами: моделирование, проектирование и симуляция . Прентис Холл PTR. ISBN 9789861544779 .
Дальнейшее чтение [ править ]
- Липтак, Бела (1995). Справочник приборостроителя: Управление технологическими процессами . Рэднор, Пенсильвания: Chilton Book Company. стр. 20–29. ISBN 978-0-8019-8242-2 .
- Тан, Кок Кионг; Ван Цин-Го; Ханг Чан Чи (1999). Достижения в области ПИД-регулирования . Лондон, Великобритания: Springer-Verlag. ISBN 978-1-85233-138-2 .
- Кинг, Майк (2010). Управление процессами: практический подход . Чичестер, Великобритания: ISBN John Wiley & Sons Ltd. 978-0-470-97587-9 .
- Ван Дорен, Вэнс Дж. (1 июля 2003 г.). «Основы настройки контура» . Техника управления .
- Селлерс, Дэвид. «Обзор пропорционального, интегрального и производного управления и предложения по его успешному применению и реализации» (PDF) . Архивировано из оригинала (PDF) 7 марта 2007 г. Проверено 5 мая 2007 г.
- Грэм, Рон; Майк МакХью (3 октября 2005 г.). «Часто задаваемые вопросы по настройке ПИД-регулятора» . Майк МакХью. Архивировано из оригинала 6 февраля 2005 года . Проверено 5 января 2009 г.
- Эйдан О'Дуайер (2009). Справочник по правилам настройки ПИ- и ПИД-регуляторов (PDF) (3-е изд.). Издательство Имперского колледжа. ISBN 978-1-84816-242-6 .
Внешние ссылки [ править ]
- Настройка ПИД с использованием Mathematica
- Настройка ПИД-регулятора с использованием Python
- Принципы ПИД-регулирования и настройки
- Введение в ключевые термины, связанные с ПИД-регулированием температуры.
Учебники по PID [ править ]
- ПИД-регулирование в MATLAB/Simulink и Python с TCLab
- Что вообще это за PID? Статья в электронном дизайне
- Показывает, как собрать ПИД-регулятор с базовыми электронными компонентами (стр. 22).
- ПИД без докторской степени
- ПИД-регулирование с MATLAB и Simulink
- ПИД с одним операционным усилителем
- Проверенные методы и лучшие практики ПИД-регулирования
- Принципы ПИД-регулирования и настройки
- Руководство по настройке ПИД-регулятора: передовой подход к пониманию и настройке ПИД-регуляторов
- Майкл Барр (30 июля 2002 г.), Введение в управление с обратной связью , программирование встраиваемых систем, заархивировано из оригинала 9 февраля 2010 г.
- Цзинхуа Чжун, машиностроение, Университет Пердью (весна 2006 г.). «Настройка ПИД-регулятора: краткое руководство» (PDF) . Архивировано из оригинала (PDF) 21 апреля 2015 г. Проверено 4 декабря 2013 г.
{{cite web}}: CS1 maint: несколько имен: список авторов ( ссылка ) - Введение в P, PI, PD и ПИД-регулятор с MATLAB
| Базы данных органов управления : Национальные |
|---|