Метеорологический радар



Метеорологический радар , также называемый радаром наблюдения за погодой ( WSR ) и доплеровским метеорологическим радаром , представляет собой тип радара , используемого для обнаружения осадков , расчета их движения и оценки их типа (дождь, снег, град и т. д.). Современные метеорологические радары в основном представляют собой импульсно-доплеровские радары , способные обнаруживать движение капель дождя в дополнение к интенсивности осадков. Оба типа данных могут быть проанализированы, чтобы определить структуру штормов и их потенциальную возможность вызвать суровую погоду .
Во время Второй мировой войны операторы радаров обнаружили, что погода вызывает эхо на их экранах, маскируя потенциальные вражеские цели. Были разработаны методы их фильтрации, но ученые начали изучать это явление. Вскоре после войны излишки радаров были использованы для обнаружения осадков. С тех пор метеорологический радар развивался и используется национальными метеорологическими службами, исследовательскими отделами университетов и метеорологическими отделами телевизионных станций . Необработанные изображения регулярно обрабатываются специализированным программным обеспечением для составления краткосрочных прогнозов будущего положения и интенсивности дождя, снега, града и других погодных явлений. Данные радаров даже включаются в численные модели прогнозирования погоды для улучшения анализа и прогнозов.
История
[ редактировать ]
Во время Второй мировой войны операторы военных радаров заметили шум в отраженных эхо-сигналах из-за дождя, снега и мокрого снега . После войны военные ученые вернулись к гражданской жизни или продолжили службу в Вооруженных силах и продолжили свою работу по разработке способов использования этого эха. В США Дэвид Атлас [1] сначала работая в ВВС , а затем в Массачусетском технологическом институте , разработал первые действующие метеорологические радары. В Канаде Дж. С. Маршалл и Р. Х. Дуглас сформировали «Группу штормовой погоды» в Монреале. [2] [3] Маршалл и его докторант Уолтер Палмер хорошо известны своей работой по распределению размеров капель дождя в средних широтах, которая привела к пониманию зависимости ZR, которая коррелирует заданную отражательную способность радара со скоростью, с которой падает дождевая вода. В Соединенном Королевстве продолжались исследования по изучению радиолокационных эхо-сигналов и погодных элементов, таких как слоистый дождь и конвективные облака , а также проводились эксперименты по оценке потенциала различных длин волн от 1 до 10 сантиметров. К 1950 году британская компания EKCO демонстрировала свое бортовое «радиолокационное оборудование для поиска облаков и предупреждений о столкновениях». [4]

Между 1950 и 1980 годами метеорологические службы по всему миру использовали радары отражательной способности, которые измеряют положение и интенсивность осадков. Первым метеорологам приходилось наблюдать за электронно-лучевой трубкой . В 1953 году Дональд Стэггс, инженер-электрик, работавший в Государственной водной службе штата Иллинойс, сделал первое зарегистрированное радиолокационное наблюдение « эхо-крючка », связанного с торнадо- грозой. [5]
Первое использование метеорологического радара по телевидению в США произошло в сентябре 1961 года. Когда ураган Карла приближался к штату Техас, местный репортер Дэн Разер , подозревая, что ураган был очень сильным, отправился в Бюро погоды США WSR-57. радиолокационная станция в Галвестоне , чтобы получить представление о размере шторма. Он убедил сотрудников бюро разрешить ему вести прямую трансляцию из их офиса и попросил метеоролога нарисовать ему приблизительный контур Мексиканского залива на прозрачном листе пластика. Во время трансляции он держал это прозрачное изображение над черно-белым дисплеем радара компьютера, чтобы дать зрителям представление о размерах Карлы и о местоположении ока шторма. Это сделало имя Разера общенациональным, и его отчет помог предупрежденному населению согласиться с эвакуацией властями примерно 350 000 человек, что было крупнейшей эвакуацией в истории США на тот момент. Благодаря предупреждению погибло всего 46 человек, и, по оценкам, эвакуация спасла несколько тысяч жизней. Ураган Галвестон 1900 года унес жизни примерно 6000–12 000 человек. [6]
В 1970-е годы радары начали стандартизироваться и объединяться в сети. Были разработаны первые устройства для захвата радиолокационных изображений. Количество углов сканирования было увеличено, чтобы получить трехмерное изображение осадков, чтобы можно было получить горизонтальные поперечные сечения ( CAPPI ) и вертикальные поперечные сечения. Тогда исследования организации гроз стали возможны для проекта «Град Альберты» в Канаде и Национальной лаборатории сильных штормов (NSSL) в США, в частности.
NSSL, созданная в 1964 году, начала эксперименты с сигналами двойной поляризации и использованием эффекта Доплера . В мае 1973 года торнадо опустошил Юнион-Сити, штат Оклахома , к западу от Оклахома-Сити . Впервые доплеровский радар с длиной волны 10 см от NSSL задокументировал весь жизненный цикл торнадо. [7] Исследователи обнаружили мезомасштабное вращение в облаке наверху до того, как торнадо коснулся земли – сигнатуру торнадо-вихря . Исследования NSSL помогли убедить Национальную метеорологическую службу в том, что доплеровский радар является важнейшим инструментом прогнозирования. [7] Супервспышка торнадо 3–4 апреля 1974 г. и их разрушительные разрушения могли помочь получить финансирование для дальнейших разработок. [ нужна ссылка ]

Между 1980 и 2000 годами сети метеорологических радиолокаторов стали нормой в Северной Америке, Европе, Японии и других развитых странах. Обычные радары были заменены доплеровскими радарами, которые помимо положения и интенсивности могли отслеживать относительную скорость частиц в воздухе. В США строительство сети, состоящей из 10-сантиметровых радаров, получившей название NEXRAD или WSR-88D (допплеровский радар метеорологического наблюдения 1988 года). в 1988 году после исследований NSSL было начато [7] [8] В Канаде Министерство окружающей среды Канады построило станцию Кинг-Сити . [9] с исследовательским доплеровским радаром диаметром 5 см - к 1985 году; Университет Макгилла допплерировал свой радар ( Радарная обсерватория Дж. С. Маршалла ) в 1993 году. Это привело к созданию полной канадской доплеровской сети. [10] между 1998 и 2004 годами. К началу 2000-х годов Франция и другие европейские страны перешли на доплеровские сети. Тем временем быстрый прогресс в компьютерных технологиях привел к появлению алгоритмов обнаружения признаков суровой погоды и множеству приложений для средств массовой информации и исследователей.
После 2000 года исследования технологии двойной поляризации перешли в оперативное использование, увеличив объем доступной информации о типах осадков (например, дождь или снег). «Двойная поляризация» означает, что излучается микроволновое излучение, поляризованное как горизонтально, так и вертикально (относительно земли). Широкомасштабное развертывание было осуществлено к концу десятилетия или началу следующего в некоторых странах, таких как США, Франция, [11] и Канада. США В апреле 2013 года все NEXRAD Национальной метеорологической службы были полностью двухполяризованными. [12]
США С 2003 года Национальное управление океанических и атмосферных исследований экспериментирует с радаром с фазированной решеткой в качестве замены обычной параболической антенны для обеспечения большего временного разрешения при зондировании атмосферы . Это может иметь важное значение в случае сильных гроз, поскольку их развитие можно лучше оценить с помощью более своевременных данных.
Также в 2003 году Национальный научный фонд учредил Инженерный исследовательский центр совместного адаптивного зондирования атмосферы (CASA), междисциплинарное межуниверситетское сотрудничество инженеров, компьютерщиков, метеорологов и социологов для проведения фундаментальных исследований, разработки передовых технологий, и развернуть прототипы инженерных систем, предназначенных для дополнения существующих радиолокационных систем путем отбора проб нижних слоев тропосферы, как правило, с недостаточной выборкой с помощью недорогих, быстро сканирующих радаров с двойной поляризацией, механическим сканированием и радарами с фазированной решеткой.
В 2023 году частная американская компания Tomorrow.io запустила Ка-диапазона космический радар для наблюдения и прогнозирования погоды. [13] [14]
Принцип
[ редактировать ]Отправка радиолокационных импульсов
[ редактировать ]
Метеорологические радары посылают направленные импульсы микроволнового излучения длительностью порядка одной микросекунды , используя резонаторный магнетрон или клистронную трубку, соединенную волноводом с параболической антенной . Длины волн 1–10 см примерно в десять раз превышают диаметр интересующих капель или частиц льда, поскольку рэлеевское рассеяние на этих частотах происходит . Это означает, что часть энергии каждого импульса будет отражаться от этих мелких частиц обратно в сторону радиолокационной станции. [15]
Более короткие волны полезны для более мелких частиц, но сигнал затухает быстрее. Таким образом, радар 10 см ( S-диапазон ) предпочтительнее, но он дороже, чем система 5 см C-диапазона . 3 см Радар X-диапазона используется только для устройств ближнего действия, а метеорологический радар Ka-диапазона 1 см используется только для исследования явлений, связанных с мелкими частицами, таких как дождь и туман. [15] Системы метеорологических радиолокаторов W-диапазона (3 мм) использовались в университетах ограниченно, но из-за более быстрого затухания большая часть данных не работает.
Радарные импульсы расходятся по мере удаления от радиолокационной станции. Таким образом, объем воздуха, который проходит импульс радара, больше для областей, находящихся дальше от станции, и меньше для близлежащих областей, что снижает разрешение на больших расстояниях. В конце дальности зондирования 150–200 км объем воздуха, сканируемый одним импульсом, может составлять порядка кубического километра. Это называется объёмом пульса . [16]
Объем воздуха, который занимает данный импульс в любой момент времени, можно аппроксимировать формулой , где v — объем, охватываемый импульсом, h — ширина импульса (например, в метрах, рассчитанная на основе длительности импульса в секундах, умноженной на скорость света), r — расстояние от радара, которое импульс уже прошел ( например, в метрах), и ширина луча (в радианах). Эта формула предполагает, что луч имеет симметричную круглую форму, «r» намного больше, чем «h», поэтому «r», взятый в начале или в конце импульса, почти одинаков, а форма объема представляет собой усеченный конус из глубина «ч». [15]


Прослушивание обратных сигналов
[ редактировать ]Между каждым импульсом радиолокационная станция служит приемником, прислушиваясь к обратным сигналам от частиц в воздухе. Длительность цикла «прослушивания» составляет порядка миллисекунды , что в тысячу раз превышает длительность импульса. Продолжительность этой фазы определяется необходимостью распространения микроволнового излучения (которое распространяется со скоростью света ) от детектора к погодной цели и обратно на расстояние, которое может составлять несколько сотен километров. Горизонтальное расстояние от станции до цели рассчитывается просто по количеству времени, которое проходит от момента возникновения импульса до обнаружения отраженного сигнала. Время преобразуется в расстояние путем умножения на скорость света в воздухе:

где c = 299 792,458 км/с — скорость света , а n ≈ 1,0003 — показатель преломления воздуха. [17]
Если импульсы излучаются слишком часто, отражения от одного импульса будут спутаны с отражениями от предыдущих импульсов, что приведет к неверным расчетам расстояния.
Определение высоты
[ редактировать ]
Поскольку Земля круглая, луч радара в вакууме будет подниматься в соответствии с обратной кривизной Земли. Однако атмосфера имеет показатель преломления , который уменьшается с высотой из-за ее уменьшающейся плотности. Это слегка изгибает луч радара по направлению к земле, а в стандартной атмосфере это эквивалентно тому, что кривизна луча составляет 4/3 фактической кривизны Земли. В зависимости от угла места антенны и других факторов для расчета высоты цели над землей можно использовать следующую формулу: [18]

где:
- r = расстояние РЛС–цель,
- к е = 4/3,
- a e = Земли , радиус
- θ e = угол места над радиолокационным горизонтом ,
- h a = высота рупора над землей.

Сеть метеорадиолокаторов использует ряд типичных углов, которые устанавливаются в соответствии с ее потребностями. После каждого поворота сканирования угол места антенны меняется для следующего зондирования. Этот сценарий будет повторяться под разными углами для сканирования всего объема воздуха вокруг радара в пределах максимальной дальности. Обычно стратегия сканирования выполняется в течение 5–10 минут, чтобы получить данные в пределах 15 км над землей и на расстоянии 250 км от радара. Например, в Канаде метеорологические радары диаметром 5 см используют углы от 0,3 до 25 градусов. На сопроводительном изображении показан объем, сканируемый при использовании нескольких углов.Из-за кривизны Земли и изменения показателя преломления с высотой радар не может «видеть» ниже высоты над землей минимального угла (показан зеленым цветом) или ближе к радару, чем максимальный (показан красным конусом на рисунке). центр). [19]
Калибровка интенсивности возврата
[ редактировать ]Поскольку цели не уникальны в каждом томе, уравнение радиолокации необходимо разрабатывать за пределами базового. Предположим, что это моностатический радар , где : [15] [20]


где получена власть, передается мощность, - коэффициент усиления передающей/приемной антенны, длина волны радара, – радиолокационное сечение цели и расстояние от передатчика до цели.






При этом сечения всех мишеней необходимо просуммировать: [21]


где это скорость света, – временная длительность импульса и — ширина луча в радианах.


Объединив два уравнения:

Что приводит к:

Доходность изменяется обратно пропорционально вместо . Чтобы сравнить данные, поступающие с разных расстояний от радара, необходимо нормализовать их с помощью этого соотношения.


Типы данных
[ редактировать ]Отражательная способность
[ редактировать ]Обратные эхо-сигналы от целей (« отражательная способность ») анализируются на предмет их интенсивности, чтобы установить скорость осаждения в сканируемом объеме. Используемые длины волн (1–10 см) гарантируют, что этот возврат будет пропорционален скорости, поскольку они находятся в пределах действия рэлеевского рассеяния , которое утверждает, что цели должны быть намного меньше длины волны сканирующей волны (в 10 раз). .
Отражательная способность, воспринимаемая радаром (Z e ), зависит от шестой степени диаметра дождевых капель (D), квадрата диэлектрической проницаемости (K) целей и распределения капель по размерам (например, N[D] Маршалла- Палмер ) капель. Это дает усеченную гамма-функцию , [22] формы:

С другой стороны, скорость осаждения (R) равна количеству частиц, их объему и скорости их падения (v[D]) как:

Таким образом, Z e и R имеют схожие функции, которые можно решить, задав между ними связь в форме, называемой отношением ZR :
- Z = аР б
Где а и б зависят от типа осадков (снеговые, дождевые, конвективные или стратообразные ), имеющих различную , К, N 0 и v.

- Когда антенна сканирует атмосферу, на каждом угле азимута она получает определенную силу отражения от каждого типа встреченной цели. Затем отражательная способность усредняется для этой цели, чтобы получить лучший набор данных.
- Поскольку изменение диаметра и диэлектрической проницаемости целей может привести к большим изменениям мощности, возвращаемой в радар, отражательная способность выражается в дБЗ (10-кратный логарифм отношения эхо-сигнала к стандартной капле диаметром 1 мм, заполняющей один и тот же сканируемый объем). ).
Как прочитать отражательную способность на дисплее радара
[ редактировать ]
Возвраты радара обычно описываются цветом или уровнем. Цвета радиолокационного изображения обычно варьируются от синего или зеленого для слабых отраженных сигналов до красного или пурпурного для очень сильных отраженных сигналов. Цифры в устном отчете увеличиваются по мере тяжести последствий. Например, на национальных радиолокационных станциях NEXRAD США используется следующая шкала для различных уровней отражательной способности: [23]
- пурпурный: 65 дБЗ (чрезвычайно сильные осадки, > 16 дюймов (410 мм) в час, но возможен град)
- красный: 50 дБЗ (сильные осадки 2 дюйма (51 мм) в час)
- желтый: 35 дБЗ (умеренные осадки 0,25 дюйма (6,4 мм) в час)
- зеленый: 20 дБЗ (небольшие осадки)
Сильные возвраты (красный или пурпурный) могут указывать не только на сильный дождь, но и на грозы, град, сильные ветры или торнадо, но их необходимо интерпретировать осторожно по причинам, описанным ниже.
Авиационные конвенции
[ редактировать ]Описывая возвраты метеорологических радаров, пилоты, диспетчеры и авиадиспетчеры обычно ссылаются на три уровня возврата: [24]
- уровень 1 соответствует зеленому сигналу радара, указывающему обычно на небольшие осадки и небольшую турбулентность или ее отсутствие, что приводит к возможности ухудшения видимости.
- уровень 2 соответствует желтому сигналу радара, указывающему на умеренные осадки, что приводит к возможности очень плохой видимости, умеренной турбулентности и дискомфорту для пассажиров самолета.
- уровень 3 соответствует красному сигналу радара, указывающему на сильные осадки, ведущие к грозам, сильной турбулентности и повреждению конструкции самолета.
Самолеты будут стараться избегать возвращения уровня 2, когда это возможно, и всегда будут избегать уровня 3, если только они не являются специально разработанными исследовательскими самолетами.
Типы осадков
[ редактировать ]На некоторых дисплеях, предоставляемых коммерческими телеканалами (как местными, так и национальными) и погодными веб-сайтами, такими как The Weather Channel и AccuWeather , показаны типы осадков в зимние месяцы: дождь, снег, смешанные осадки ( мокрый снег и ледяной дождь ). Это не анализ самих радиолокационных данных, а последующая обработка с использованием других источников данных, основными из которых являются отчеты с поверхности ( METAR ). [25]
На территории, покрытой радиолокационными эхосигналами, программа назначает тип осадков в зависимости от температуры поверхности и точки росы, сообщаемой на расположенных ниже метеостанциях . Типы осадков, сообщаемые станциями, управляемыми людьми, и некоторыми автоматическими станциями ( AWOS ), будут иметь более высокий вес. [26] Затем программа выполняет интерполяцию для создания изображения с определенными зонами. Сюда будут включены ошибки интерполяции, возникшие в результате вычислений. Мезомасштабные вариации зон осадков также будут потеряны. [25] Более сложные программы используют выходные данные численного прогноза погоды из таких моделей, как NAM и WRF , для типов осадков и применяют их в качестве первого предположения к радиолокационным эхо-сигналам, а затем используют данные о поверхности для окончательного вывода.
Пока данные двойной поляризации (раздел «Поляризация» ниже) не станут широко доступны, любые типы осадков на радиолокационных изображениях являются лишь косвенной информацией, и к ним следует относиться с осторожностью.
Скорость
[ редактировать ]
Осадки выпадают в облаках и под ними. Легкие осадки, такие как капли и хлопья, подвержены влиянию воздушных потоков, и сканирующий радар может улавливать горизонтальную составляющую этого движения, что дает возможность оценить скорость и направление ветра там, где присутствуют осадки.
Движение цели относительно радиолокационной станции вызывает изменение отраженной частоты радиолокационного импульса за счет эффекта Доплера . При скорости менее 70 метров в секунду для эхо-сигналов погоды и длине волны радара 10 см это составляет изменение всего лишь 0,1 ppm . Эта разница слишком мала, чтобы ее можно было заметить электронными приборами. Однако, поскольку между каждым импульсом цели слегка перемещаются, отраженная волна имеет заметную разность фаз или сдвиг фазы от импульса к импульсу.
Импульсная пара
[ редактировать ]Доплеровские метеорологические радары используют эту разность фаз (разность пар импульсов) для расчета движения осадков. Интенсивность последовательно возвращающегося импульса из того же сканируемого объема, где цели слегка сдвинулись, равна: [15]

Так , v = целевая скорость = .Эта скорость называется радиальной доплеровской скоростью, поскольку она дает только радиальное изменение расстояния во времени между радаром и целью. Реальную скорость и направление движения необходимо определить с помощью процесса, описанного ниже.


Допплеровская дилемма
[ редактировать ]
Фаза между парами импульсов может варьироваться от - и + , поэтому однозначный диапазон доплеровских скоростей равен [15]

- В макс =


Это называется скоростью Найквиста . Это обратно пропорционально зависит от времени между последовательными импульсами: чем меньше интервал, тем больше однозначный диапазон скоростей. Однако мы знаем, что максимальный диапазон отражательной способности прямо пропорционален :

- х =

Выбором становится увеличение дальности от отражательной способности за счет дальности скорости, или увеличение последней за счет дальности от отражательной способности. В общем, полезный компромисс по дальности составляет 100–150 км для отражательной способности. Это означает, что для длины волны 5 см (как показано на схеме) создается однозначный диапазон скоростей от 12,5 до 18,75 метров в секунду (для 150 км и 100 км соответственно). Для радара диаметром 10 см, такого как NEXRAD, [15] однозначный диапазон скоростей будет увеличен вдвое.
Некоторые методы, использующие две чередующиеся частоты повторения импульсов (PRF), позволяют расширить доплеровский диапазон. Скорости, отмеченные при первой частоте импульсов, могут быть равными или отличаться от второй. Например, если максимальная скорость с одной скоростью составляет 10 метров в секунду, а с другой - 15 м/с. Данные, поступающие от обоих, будут одинаковыми до 10 м/с, а в дальнейшем будут различаться. Тогда можно найти математическую связь между двумя доходностями и вычислить реальную скорость за пределами ограничений двух PRF.
Допплеровская интерпретация
[ редактировать ]
При равномерном ливне, движущемся на восток, луч радара, направленный на запад, «увидит» капли дождя, движущиеся к себе, а луч, направленный на восток, «увидит», как капли удаляются. Когда луч сканирует на север или на юг, относительного движения не наблюдается. [15]
синоптический
[ редактировать ]При интерпретации синоптического масштаба пользователь может извлечь данные о ветре на разных уровнях в зоне действия радара. Поскольку луч сканирует радар на 360 градусов, данные будут поступать со всех этих углов и представлять собой радиальную проекцию фактического ветра на отдельный угол. Картина интенсивности, формируемая в результате этого сканирования, может быть представлена косинусоидальной кривой (максимум при движении осадков и ноль в перпендикулярном направлении). Затем можно рассчитать направление и силу движения частиц, если на экране радара достаточно покрытия.
Однако капли дождя падают. Поскольку радар видит только радиальную составляющую и находится на определенной высоте над землей, радиальные скорости искажаются некоторой частью скорости падения. Эта составляющая незначительна при малых углах места, но ее необходимо учитывать при более высоких углах сканирования. [15]
Мезо-весы
[ редактировать ]В данных о скорости могут быть меньшие зоны в зоне действия радара, где ветер отличается от упомянутого выше. Например, гроза — это мезомасштабное явление, которое часто включает в себя вращение и турбулентность . Они могут занимать всего несколько квадратных километров, но видны по изменениям радиальной скорости. Пользователи могут распознавать закономерности скорости ветра, связанные с вращениями, такие как мезоциклон , конвергенция ( граница оттока ) и дивергенция ( нисходящий порыв ).
поляризация
[ редактировать ]
Капли падающей жидкой воды имеют тенденцию иметь большую горизонтальную ось из-за коэффициента сопротивления воздуха при падении (капли воды). воды молекулы Это заставляет диполь ориентироваться в этом направлении; Итак, лучи радара, как правило, поляризованы горизонтально, чтобы получить максимальное отражение сигнала.
Если одновременно отправить два импульса с ортогональной поляризацией (вертикальной и горизонтальной, Z V и Z H соответственно), будут получены два независимых набора данных. Эти сигналы можно сравнить несколькими полезными способами: [27] [28]
- Дифференциальная отражательная способность ( Z dr ) – Дифференциальная отражательная способность пропорциональна соотношению отраженных горизонтальных и вертикальных возвратных мощностей как Z H / Z V . Помимо прочего, это хороший индикатор формы капель. Дифференциальная отражательная способность также может дать оценку среднего размера капель, поскольку более крупные капли более подвержены деформации под действием аэродинамических сил, чем более мелкие (т. е. более крупные капли с большей вероятностью приобретут форму «булочки для гамбургера») при падении через воздух.
- Коэффициент корреляции ( ρ hv ) – статистическая корреляция между отраженными горизонтальными и вертикальными отдачами мощности. Высокие значения, близкие к единице, указывают на однородные типы осадков, тогда как более низкие значения указывают на области смешанных типов осадков, таких как дождь и снег или град, или, в крайних случаях, поднятые обломки, обычно совпадающие с сигнатурой обломков торнадо и сигнатурой вихря торнадо .
- Коэффициент линейной деполяризации ( LDR ) — это коэффициент возврата вертикальной мощности от горизонтального импульса или горизонтального возврата мощности от вертикального импульса. Он также может указывать на регионы, где наблюдаются смешанные типы осадков.
- Дифференциальная фаза ( ) – Дифференциальная фаза представляет собой сравнение возвращаемой разности фаз между горизонтальными и вертикальными импульсами. Это изменение фазы вызвано разницей в количестве волновых циклов (или длин волн) на пути распространения волн с горизонтальной и вертикальной поляризацией. Его не следует путать с доплеровским сдвигом частоты, который вызван движением облаков и частиц осадков. В отличие от дифференциальной отражательной способности, коэффициента корреляции и коэффициента линейной деполяризации, которые зависят от отраженной мощности, дифференциальная фаза представляет собой «эффект распространения». Это очень хороший показатель интенсивности дождя, на который не влияет затухание . Производная диапазона дифференциальной фазы (специфическая дифференциальная фаза, K dp ) может использоваться для локализации областей сильных осадков/затухания.

Имея больше информации о форме частиц, радары с двойной поляризацией могут легче отличить воздушный мусор от осадков, что облегчает обнаружение торнадо . [29]
Благодаря этим новым знаниям, добавленным к отражательной способности, скорости и ширине спектра, получаемым доплеровскими метеорологическими радарами, исследователи работают над разработкой алгоритмов для различения типов осадков, неметеорологических целей и для получения более точных оценок накопления осадков. [27] [30] [31] В США NCAR и NSSL . мировыми лидерами в этой области являются [27] [32]
NOAA организовало испытательное развертывание двухполяриметрического радара в NSSL и оборудовало все свои 10-сантиметровые радары NEXRAD двойной поляризацией, что было завершено в апреле 2013 года. [12] В 2004 году доплеровский метеорологический радар ARMOR в Хантсвилле, штат Алабама, был оснащен приемником SIGMET, установленным на антенне, что давало оператору возможность двухполярметрической работы. Университета Макгилла Радарная обсерватория имени Дж. С. Маршалла в Монреале , Канада, переоборудовала свой инструмент (1999 г.) [33] и данные использовались Министерством окружающей среды Канады в Монреале до его закрытия в 2018 году. [34] [35] Другой радар Министерства окружающей среды Канады, расположенный в Кинг-Сити (к северу от Торонто ), в 2005 году был двухполяризованным; [36] он использует длину волны 5 см, которая испытывает большее затухание . [37] Министерство окружающей среды Канады постепенно переводит все свои радары на двойную поляризацию. [38] Метео-Франс планирует включить в зону покрытия своей сети доплеровский радар с двойной поляризацией. [39]
Методы отображения радара
[ редактировать ]Со временем были разработаны различные методы отображения данных радиолокационного сканирования для удовлетворения потребностей пользователей. Это список распространенных и специализированных дисплеев:
Индикатор положения плана
[ редактировать ]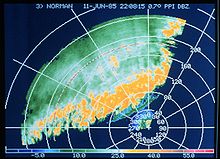
Поскольку данные получаются по одному ракурсу за раз, первым способом их отображения был индикатор положения в плане (PPI), который представляет собой всего лишь схему отражения радара на двухмерном изображении. Важно отметить, что данные, поступающие к радару с разных расстояний, находятся на разной высоте над землей.
Это очень важно, поскольку интенсивность дождя, наблюдаемая вблизи радара, относительно близка к тому, что достигает земли, но то, что видно на расстоянии 160 км, находится на высоте около 1,5 км над землей и может сильно отличаться от количества дождя, достигающего поверхности. Таким образом, трудно сравнивать эхо-сигналы погоды на разных расстояниях от радара.
На PPI влияют эхосигналы от земли вблизи радара. Их можно ошибочно принять за настоящее эхо. Чтобы восполнить эти недостатки, были разработаны другие продукты и дальнейшая обработка данных.
Использование: Данные об отражательной способности, доплеровском и поляриметрическом измерении могут использовать PPI.
В случае доплеровских данных возможны две точки зрения: относительно поверхности или шторма. При рассмотрении общего движения дождя для определения ветра на разных высотах лучше использовать данные радара. Но при поиске вращения или сдвига ветра во время грозы лучше использовать изображения, относящиеся к шторму, которые вычитают общее движение осадков, позволяя пользователю наблюдать за движением воздуха, как если бы он сидел на облаке.
Индикатор положения плана постоянной высоты
[ редактировать ]
Чтобы избежать некоторых проблем с PPI, канадские исследователи разработали индикатор положения плана постоянной высоты (CAPPI). Это горизонтальное сечение радиолокационных данных. Таким образом, можно сравнивать осадки на равных условиях на разном расстоянии от радара и избегать эхосигналов от земли. Хотя данные собираются на определенной высоте над землей, можно сделать вывод о связи между сообщениями наземных станций и данными радара.
CAPPI требуют большого количества углов от горизонтального до почти вертикального радара, чтобы срез был как можно ближе на всем расстоянии к необходимой высоте. Даже тогда, после определенного расстояния, доступного угла больше нет, и CAPPI становится PPI самого низкого угла. Зигзагообразная линия на диаграмме углов выше показывает данные, использованные для расчета CAPPI на высоте 1,5 км и 4 км. Обратите внимание, что на участке после 120 км используются те же данные.
- Использование
Поскольку CAPPI использует угол, наиболее близкий к желаемой высоте в каждой точке радара, данные могут поступать с несколько разных высот, как видно на изображении, в разных точках радиолокационного покрытия. Поэтому крайне важно иметь достаточно большое количество углов зондирования, чтобы минимизировать это изменение высоты. Более того, тип данных должен меняться относительно постепенно с высотой, чтобы изображение не было зашумленным.
Данные об отражательной способности относительно плавны по высоте, поэтому для их отображения в основном используются CAPPI. С другой стороны, данные о скорости могут быстро меняться в направлении с высотой, и CAPPI для них не распространены. Похоже, что только Университет Макгилла регулярно производит доплеровские CAPPI с 24 углами, доступными на их радаре. [40] Однако некоторые исследователи опубликовали статьи, в которых использовались скоростные CAPPI для изучения тропических циклонов и разработки продуктов NEXRAD . [41] Наконец, поляриметрические данные являются свежими и часто зашумлены. Похоже, они не используют CAPPI регулярно, хотя компания SIGMET предлагает программное обеспечение, способное создавать изображения такого типа. [42]
Вертикальный композит
[ редактировать ]
Другим решением проблем PPI является создание изображений с максимальной отражательной способностью в надземном слое. Это решение обычно применяется, когда количество доступных углов невелико или переменно. Американская национальная метеорологическая служба использует такой композит, поскольку их схема сканирования может варьироваться от 4 до 14 углов в зависимости от потребностей, что приводит к очень грубым CAPPI. Composite гарантирует, что в слое не будет пропущено ни одного сильного эхо-сигнала, а обработка с использованием доплеровских скоростей устраняет эхо-сигналы от земли. Сравнивая базовые и композитные изделия, можно выделить зоны вирги и восходящих потоков .
Накопления
[ редактировать ]
Еще одним важным применением радиолокационных данных является возможность оценить количество осадков, выпавших в крупных бассейнах, для использования в гидрологических расчетах; такие данные полезны при борьбе с наводнениями, управлении канализацией и строительстве плотин. Вычисленные данные радара о погоде могут использоваться вместе с данными наземных станций.
Чтобы получить данные радара, мы должны оценить интенсивность дождя в определенной точке по среднему значению в этой точке между одним PPI, или CAPPI, и следующим; затем умножьте на время между этими изображениями. Если кто-то хочет более длительного периода времени, ему нужно сложить все накопления от изображения к изображению за это время.
Эхотопс
[ редактировать ]Авиация является активным пользователем радиолокационных данных. Одна карта, особенно важная в этой области, — это Echotops для планирования полетов и предотвращения опасной погоды. Большинство метеорологических радаров страны сканируют достаточно углов, чтобы получить трехмерный набор данных по зоне покрытия. Относительно легко оценить максимальную высоту, на которой в объеме обнаруживаются осадки. Однако это не вершины облаков, поскольку они всегда возвышаются над осадками.
Вертикальные сечения
[ редактировать ]
Чтобы узнать вертикальную структуру облаков, в частности гроз, или уровень тающего слоя, метеорологам доступно вертикальное поперечное сечение радиолокационных данных. Это делается путем отображения только данных вдоль линии от координат A до B, взятых под разными углами сканирования.
Индикатор высоты диапазона
[ редактировать ]
Когда метеорологический радар сканирует только по вертикальной оси, он может получить данные с гораздо более высоким разрешением, чем при использовании составного вертикального среза с использованием комбинированных наклонов PPI. Этот результат называется индикатором высоты диапазона (RHI) и отлично подходит для просмотра подробной мелкомасштабной вертикальной структуры шторма. Как уже упоминалось, это отличается от упомянутого выше вертикального сечения, а именно тем, что антенна радара сканирует исключительно вертикально, а не сканирует все 360 градусов вокруг объекта. Этот тип продукта обычно доступен только на исследовательских радарах.
Радарные сети
[ редактировать ]
За последние несколько десятилетий радиолокационные сети были расширены, что позволяет получать составные изображения, охватывающие большие территории. Например, такие страны, как США, Канада, Австралия, Япония и большая часть Европы, объединяют изображения со своей радиолокационной сети в единый дисплей.
Фактически, такая сеть может состоять из радаров разных типов с разными характеристиками, такими как ширина луча, длина волны и калибровка. Эти различия необходимо учитывать при сопоставлении данных по сети, особенно при принятии решения, какие данные использовать, когда два радара покрывают одну и ту же точку. Если используется более сильное эхо, но оно исходит от самого удаленного радара, можно использовать отраженные сигналы с большей высоты, исходящие от дождя или снега, которые могут испариться, не достигнув земли ( вирга ). Если использовать данные ближайшего радара, они могут быть ослаблены при прохождении через грозу. Составные изображения осадков с использованием сети радаров создаются с учетом всех этих ограничений.
Автоматические алгоритмы
[ редактировать ]
Чтобы помочь метеорологам обнаружить опасную погоду, в программы обработки метеорологических радаров были введены математические алгоритмы. Это особенно важно при анализе данных доплеровской скорости, поскольку они более сложны. Для данных о поляризации даже потребуется больше алгоритмов.
Основные алгоритмы отражательной способности: [15]
- Вертикально интегрированная жидкость (VIL) представляет собой оценку общей массы осадков в облаках.
- Плотность VIL равна VIL, разделенному на высоту верхней границы облаков. Это ключ к предположению о возможности сильного града во время грозы.
- Потенциальный порыв ветра , который позволяет оценить ветер под облаком (нисходящий поток) с использованием VIL и высоты эхотопов (радарная оценка верхней части облака) для данной грозовой ячейки.
- Алгоритмы града , которые оценивают наличие града и его вероятный размер.
Основные алгоритмы определения доплеровских скоростей: [15]
- Обнаружение мезоциклона : запускается при изменении скорости на небольшой круглой площади. Алгоритм ищет « дублет » входных и исходящих скоростей с нулевой линией скоростей между ними вдоль радиальной линии от радара. Обычно обнаружение мезоциклона должно быть обнаружено при двух или более последовательных последовательных наклонах луча, чтобы можно было судить о вращении в грозовое облако.
- Алгоритм TVS или Tornado Vortex Signature, по сути, представляет собой мезоциклон с большим порогом скорости, обнаруженным при многих углах сканирования. Этот алгоритм используется в NEXRAD для указания возможности образования торнадо.
- Сдвиг ветра на низких уровнях. Этот алгоритм обнаруживает изменение скорости ветра от точки к точке в данных и ищет дублет прибывающих и исходящих скоростей с нулевой линией, перпендикулярной лучу радара. Сдвиг ветра связан с нисходящим потоком ( нисходящими порывами и микропорывами ), фронтами порывов ветра и турбулентностью во время гроз.
- Профиль ветра VAD (VWP) — это дисплей, который оценивает направление и скорость горизонтального ветра на различных верхних уровнях атмосферы с использованием метода, описанного в разделе доплеровских данных.
Анимации
[ редактировать ]
Анимация радаров может показать эволюцию отражательной способности и характеристик скорости. Пользователь может извлекать информацию о динамике метеорологических явлений, включая возможность экстраполировать движение и наблюдать за развитием или исчезновением. Это также может выявить неметеорологические артефакты (ложные эхо), которые будут обсуждаться позже.
Интегрированный дисплей радара с геопространственными элементами
[ редактировать ]
Новым популярным способом представления данных метеорологических радаров в США является интегрированный радарный дисплей с геопространственными элементами (RIDGE), в котором радиолокационные данные проецируются на карту с геопространственными элементами, такими как топографические карты, автомагистрали, границы штатов/округа и погодные предупреждения. Проекция часто является гибкой, предоставляя пользователю возможность выбора различных географических элементов. Он часто используется в сочетании с анимацией радиолокационных данных за определенный период времени. [44] [45]
Ограничения и артефакты
[ редактировать ]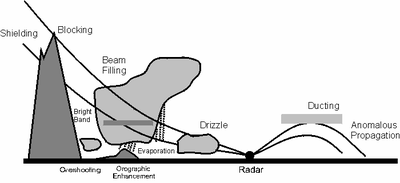
Интерпретация радиолокационных данных зависит от многих гипотез об атмосфере и погодных целях, в том числе: [46]
- Международная стандартная атмосфера .
- Цели достаточно малы, чтобы подчиняться рэлеевскому рассеянию, в результате чего отдача пропорциональна скорости осадков.
- Объем, сканируемый лучом, полон метеорологических целей (дождь, снег и т. д.), все одного разнообразия и в одинаковой концентрации.
- Нет затухания
- Нет усиления
- Отдача от боковых лепестков луча незначительна.
- Пучок близок к кривой функции Гаусса , мощность которой уменьшается вдвое на половине ширины.
- Уходящая и обратная волны поляризованы одинаково.
- От множественных отражений нет возврата.
Эти предположения не всегда выполняются; надо уметь различать достоверные и сомнительные эхо.
Аномальное распространение (нестандартная атмосфера)
[ редактировать ]Первое предположение состоит в том, что луч радара движется через воздух, который с высотой остывает с определенной скоростью. Положение эха во многом зависит от этой гипотезы. Однако реальная атмосфера может сильно отличаться от обычной.
Суперрефракция
[ редактировать ]Температурные инверсии часто образуются у земли, например, из-за охлаждения воздуха ночью, когда наверху остается тепло. Поскольку показатель преломления воздуха уменьшается быстрее, чем обычно, луч радара изгибается к земле, а не поднимается вверх. В конце концов он упадет на землю и отразится обратно в сторону радара. В этом случае программа обработки ошибочно разместит отраженные эхо-сигналы на той высоте и расстоянии, на которых они находились бы в нормальных условиях. [46]
Этот тип ложного возврата относительно легко обнаружить на временной петле, если он вызван ночным похолоданием или морской инверсией, поскольку можно увидеть очень сильные эхосигналы, развивающиеся по определенной территории, распространяющиеся по размеру в поперечном направлении, но не перемещающиеся и сильно различающиеся по интенсивности. Однако перед теплыми фронтами существует инверсия температуры , и аномальные эхо-сигналы затем смешиваются с реальным дождем.
Крайняя форма этой проблемы заключается в том, что когда инверсия очень сильная и неглубокая, луч радара многократно отражается к земле, поскольку ему приходится следовать по волноводной траектории. Это создаст на радиолокационных изображениях несколько полос сильных эхо-сигналов.
Такая ситуация может наблюдаться при инверсиях температуры на высоте или быстром уменьшении влажности с высотой. [47] В первом случае это может быть трудно заметить.
Под рефракцией
[ редактировать ]С другой стороны, если воздух нестабилен и с высотой остывает быстрее, чем стандартная атмосфера, луч оказывается выше ожидаемого. [47] Это указывает на то, что количество осадков выпадает выше фактической высоты. Такую ошибку трудно обнаружить без дополнительных данных о градиенте температуры для данной местности.
Нерэлеевские цели
[ редактировать ]Если мы хотим достоверно оценить интенсивность осадков, согласно рэлеевскому рассеянию, цели должны быть в 10 раз меньше радиолокационной волны. [15] Это связано с тем, что молекула воды должна быть возбуждена радиолокационной волной, чтобы дать возврат. Это относительно верно для дождя или снега, поскольку обычно используются радары с длиной волны 5 или 10 см.
Однако для очень больших гидрометеоров, поскольку длина волны порядка камня, возврат выравнивается согласно теории Ми . Возврат более 55 дБЗ, скорее всего, будет исходить от града, но не будет меняться пропорционально его размеру. С другой стороны, очень маленькие цели, такие как капли облаков, слишком малы, чтобы их можно было возбуждать, и не дают регистрируемой отдачи обычными метеорологическими радарами.
Разрешение и частично заполненный сканируемый объем
[ редактировать ]

Как показано в начале статьи, лучи радара имеют физические размеры, и данные собираются под дискретными углами, а не непрерывно, вдоль каждого угла места. [46] Это приводит к усреднению значений возвратных данных по отражательной способности, скорости и поляризации на сканируемом объеме с разрешением.
На рисунке слева вверху показан вид грозы, сделанный профилометром ветра , когда она проходила над головой. Это похоже на вертикальное сечение облака с разрешением 150 метров по вертикали и 30 метров по горизонтали. Отражательная способность сильно меняется на небольшом расстоянии. Сравните это с смоделированным представлением того, что увидит обычный метеорологический радар на расстоянии 60 км (внизу рисунка). Все выровнено. Не только более грубое разрешение радара размывает изображение, но и зондирование включает в себя области, свободные от эха, что расширяет грозу за ее реальные границы.
Это показывает, что результаты метеорологического радара являются лишь приближением к реальности. На изображении справа сравниваются реальные данные двух почти расположенных рядом радаров. примерно TDWR вдвое меньше, Ширина луча чем у другого, и можно увидеть в два раза больше деталей, чем с помощью NEXRAD.
Разрешение можно улучшить с помощью нового оборудования, но некоторые вещи этого сделать невозможно. Как упоминалось ранее, сканируемый объем увеличивается с расстоянием, поэтому вероятность того, что луч заполнен лишь частично, также увеличивается. Это приводит к недооценке количества осадков на больших расстояниях и вводит пользователя в заблуждение, заставляя его думать, что дождь становится легче по мере удаления.
Геометрия балки
[ редактировать ]Луч радара имеет распределение энергии, подобное дифракционной картине света, проходящего через щель. [15] Это связано с тем, что волна передается на параболическую антенну через щель в волноводе в фокусе. Большая часть энергии находится в центре пучка и убывает по кривой, близкой к функции Гаусса, с каждой стороны. Однако существуют вторичные пики излучения, которые захватывают цели под углами от центра. Конструкторы пытаются минимизировать мощность, передаваемую такими лепестками, но устранить их невозможно.
Когда вторичный лепесток достигает отражающей цели, такой как гора или сильная гроза, часть энергии отражается на радар. Эта энергия относительно слаба, но приходит в то же время, когда центральный пик освещает другой азимут. Таким образом, программа обработки перемещает эхо не на свое место. Это приводит к фактическому расширению реального эхо-сигнала погоды, создавая размытие более слабых значений по обе стороны от него. Это заставляет пользователя переоценивать масштабы реального эхо. [46]
 |  |  |
Непогодные цели
[ редактировать ]В небе больше, чем дождь и снег. Другие объекты метеорологические радары могут ошибочно принять за дождь или снег. Насекомых и членистоногих уносит господствующий ветер, а птицы следуют своим курсом. [48] Таким образом, в тонких линиях на изображениях метеорологических радиолокаторов, связанных со сходящимися ветрами, преобладают возвращения насекомых. [49] Миграция птиц, которая, как правило, происходит ночью в пределах нижних 2000 метров атмосферы Земли , загрязняет профили ветра, собранные метеорологическим радаром, в частности WSR-88D , из-за увеличения скорости ветра в окружающей среде на 30–60 км/ч. [50] Другие объекты на радиолокационных изображениях включают: [46]
- Тонкие металлические полоски ( мякина ), сбрасываемые военными самолетами для обмана врагов.
- Твердые препятствия, такие как горы, здания и самолеты.
- Загромождение земли и моря.
- Отражения от близлежащих зданий («городские шипы»).
Такие посторонние предметы обладают характеристиками, позволяющими тренированному глазу их различить. Некоторые из них также можно устранить путем последующей обработки данных с использованием данных отражательной способности, доплеровского картирования и поляризации.
Ветровые электростанции
[ редактировать ]
Вращающиеся лопасти ветряных мельниц на современных ветряных электростанциях могут возвращать луч радара на радар, если они находятся на его пути. Поскольку лопасти движутся, эхо-сигналы будут иметь скорость, и их можно будет принять за настоящие осадки. [51] Чем ближе ветряная электростанция, тем сильнее отдача, и сильнее объединенный сигнал от многих вышек. В некоторых условиях радар может даже видеть скорости по направлению и по направлению, что генерирует ложные срабатывания для алгоритма сигнатуры вихря торнадо на метеорологическом радаре; такое событие произошло в 2009 году в Додж-Сити, штат Канзас . [52]
Как и в случае с другими структурами, стоящими в луче, ослабление отраженных сигналов радара, исходящего из-за ветряных мельниц, также может привести к недооценке.
Затухание
[ редактировать ]
Микроволны, используемые в метеорологических радарах, могут поглощаться дождем, в зависимости от используемой длины волны. Для радаров диаметром 10 см это ослабление незначительно. [15] Именно по этой причине страны с ураганами с высоким содержанием воды используют длину волны 10 см, например, NEXRAD в США. Это преимущество компенсирует стоимость более крупной антенны, клистрона и другого сопутствующего оборудования.
Для радара диаметром 5 см поглощение становится важным во время сильного дождя, и это ослабление приводит к недооценке эхо-сигналов во время сильной грозы и за ее пределами. [15] Канада и другие северные страны используют этот менее дорогостоящий вид радара, поскольку осадки в таких районах обычно менее интенсивны. Однако пользователи должны учитывать эту характеристику при интерпретации данных. На изображениях выше видно, как сильная линия эхо-сигналов исчезает по мере движения над радаром. Чтобы компенсировать такое поведение, радиолокационные станции часто выбираются так, чтобы зона покрытия несколько перекрывалась, чтобы дать разные точки зрения на одни и те же штормы.
Более короткие волны ослабляются еще сильнее и полезны только на коротких дистанциях. [15] радар. Многие телевизионные станции в Соединенных Штатах имеют радары диаметром 5 см для покрытия своей аудитории. Знание их ограничений и использование их с местным NEXRAD может дополнить данные, доступные метеорологу.
В связи с распространением радиолокационных систем с двойной поляризацией оперативные метеорологические службы в настоящее время реализуют надежные и эффективные подходы к компенсации ослабления в дожде. [53] [54] [55] Коррекция затухания частиц снега в метеорологических радарах является активной темой исследований. [56]
Яркая группа
[ редактировать ]
Отражательная способность луча радара зависит от диаметра цели и ее способности отражать. Снежинки большие, но слабо отражают свет, а капли дождя маленькие, но хорошо отражают свет. [15] [57]
Когда снег падает через слой выше температуры замерзания, он тает и превращается в дождь. Используя уравнение отражательной способности, можно продемонстрировать, что отражения от снега до таяния и дождя после него не слишком различаются, поскольку изменение диэлектрической проницаемости компенсирует изменение размера. Однако в процессе таяния радарная волна «видит» что-то вроде очень крупных капель, когда снежинки покрываются водой. [15] [57]
Это дает повышенную отдачу, которую можно ошибочно принять за более сильные осадки. На PPI это будет проявляться как интенсивное кольцо осадков на высоте, где луч пересекает уровень плавления, тогда как на серии CAPPI только те, которые находятся вблизи этого уровня, будут иметь более сильные эхо. Хороший способ подтвердить яркую полосу — сделать вертикальное сечение данных, как показано на рисунке выше. [46]
Противоположная проблема заключается в том, что дождь (осадки с небольшим диаметром капель воды) имеет тенденцию не обнаруживаться на радаре, поскольку отраженные сигналы радара пропорциональны шестой степени диаметра капли.
Множественные отражения
[ редактировать ]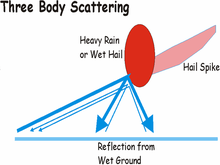
Предполагается, что луч попадает на метеоцели и возвращается непосредственно на радар. На самом деле энергия отражается во всех направлениях. Большая часть его слаба, а множественные отражения уменьшают его еще больше, поэтому то, что в конечном итоге может вернуться в радар от такого события, незначительно. Однако в некоторых ситуациях антенна радара позволяет принять многократно отраженный луч радара. [15] Например, когда луч попадает в град, энергия, распространяющаяся в сторону влажной земли, будет отражаться обратно в град, а затем в радар. Результирующее эхо слабое, но заметное. Из-за дополнительной длины пути, который ему приходится пройти, он позже достигает антенны и располагается дальше, чем его источник. [58] Это дает своего рода треугольник ложных более слабых отражений, расположенный радиально за градом. [46]
Решения и будущие решения
[ редактировать ]Фильтрация
[ редактировать ]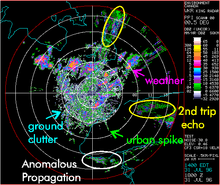

Эти два изображения показывают, чего можно добиться, чтобы очистить радиолокационные данные. На первом изображении, сделанном на основе необработанных данных, трудно отличить настоящую погоду. Поскольку дождевые и снежные облака обычно движутся, доплеровские скорости можно использовать для устранения значительной части помех (эхосигналы от земли, отражения от зданий, воспринимаемые как городские пики, аномальное распространение). Другое изображение было отфильтровано с использованием этого свойства.
Однако не все неметеорологические цели остаются неподвижными (птицы, насекомые, пыль). Другие, например яркая полоса, зависят от структуры осадков. Поляризация предлагает прямую типизацию эхо-сигналов, которую можно использовать для фильтрации большего количества ложных данных или создания отдельных изображений для специализированных целей, таких как помехи, птицы и т. д. подмножества. [59] [60]
Мезонет
[ редактировать ]
Другой вопрос – разрешение. Как уже упоминалось, данные радара представляют собой среднее значение объема сканирования луча. Разрешение можно улучшить за счет более крупной антенны или более плотной сети. Программа Центра совместного адаптивного зондирования атмосферы (CASA) направлена на дополнение обычной NEXRAD (сети в США) с использованием множества недорогих метеорадиолокаторов X-диапазона (3 см), установленных на вышках сотовой связи. [61] [62] Эти радары разделят большую площадь NEXRAD на более мелкие области, чтобы можно было наблюдать на высотах ниже наименьшего угла. Они дадут детали, которые иначе не доступны.
При использовании радаров диаметром 3 см антенна каждого радара небольшая (диаметр около 1 метра), но разрешение на небольшом расстоянии аналогично разрешению NEXRAD. Затухание является значительным из-за используемой длины волны, но каждая точка в зоне покрытия видна многим радарам, каждый из которых смотрит с разных направлений и компенсирует потерю данных от других. [61]
Стратегии сканирования
[ редактировать ]Количество сканируемых высот и время, необходимое для полного цикла, зависят от погоды. Например, при небольшом количестве осадков или при их отсутствии схема может быть ограничена самыми низкими углами и использовать более длинные импульсы для обнаружения смещения ветра у поверхности. С другой стороны, при сильных грозах лучше сканировать под большим углом, чтобы как можно чаще получать трехмерное изображение осадков. Чтобы смягчить различные требования, стратегии сканирования были разработаны в соответствии с типом радара, используемой длиной волны и наиболее распространенными погодными ситуациями в рассматриваемом районе.
Одним из примеров стратегий сканирования является радиолокационная сеть NEXRAD в США , которая со временем развивалась. В 2008 году было добавлено дополнительное разрешение данных. [63] а в 2014 году – дополнительное внутрицикловое сканирование высоты самого низкого уровня ( MESO-SAILS [64] ).
Электронное звучание
[ редактировать ]Своевременность также нуждается в улучшении. Поскольку между полными сканированиями метеорологического радара проходит от 5 до 10 минут, при развитии грозы большая часть данных теряется. Радар с фазированной решеткой проходит испытания в Национальной лаборатории сильных штормов в Нормане, штат Оклахома , для ускорения сбора данных. [65] Команда из Японии также развернула радар с фазированной решеткой для 3D NowCasting в Передовом институте вычислительных наук RIKEN (AICS). [66]
Специализированные приложения
[ редактировать ]
Метеорологический радар для авионики
[ редактировать ]Применение радиолокационных систем на самолетах включает в себя метеорологический радар, систему предотвращения столкновений, отслеживание целей, близость к земле и другие системы. Для коммерческих метеорологических радиолокаторов ARINC 708 является основной спецификацией систем метеорологических радиолокаторов, использующих бортовой импульсно-доплеровский радар .
Антенны
[ редактировать ]В отличие от наземного метеорологического радара, который устанавливается под фиксированным углом, бортовой метеорологический радар используется с носовой части или крыла самолета. Самолет будет не только двигаться вверх, вниз, влево и вправо, но и катиться. Чтобы компенсировать это, антенна подсоединяется и калибруется к вертикальному гироскопу, расположенному на самолете. Делая это, пилот может установить наклон или угол антенны, который позволит стабилизатору удерживать антенну в правильном направлении при умеренных маневрах. Маленькие серводвигатели не смогут справиться с резкими маневрами, но они попытаются. При этом пилот может настроить радар так, чтобы он указывал на интересующую погодную систему. Если самолет находится на малой высоте, пилоту желательно установить радар выше линии горизонта, чтобы на дисплее были минимизированы помехи от земли. Если самолет находится на очень большой высоте, пилот установит радар под низким или отрицательным углом, чтобы направить радар на облака, где бы они ни находились относительно самолета. Если самолет меняет положение, стабилизатор соответствующим образом настраивается, так что пилоту не приходится одной рукой летать, а другой настраивать радар. [67]
Приемники/передатчики
[ редактировать ]Говоря о приемнике/передатчике, можно выделить две основные системы: первая — это системы высокой мощности, а вторая — системы малой мощности; оба из них работают в диапазоне частот X-диапазона (8000–12500 МГц). Мощные системы работают при мощности 10 000 – 60 000 Вт. Эти системы состоят из магнетронов, которые довольно дороги (около 1700 долларов США) и допускают значительный шум из-за неполадок в системе. Таким образом, эти системы очень опасны из-за искрения и небезопасны для использования рядом с наземным персоналом. Однако альтернативой могут стать маломощные системы. Эти системы работают с мощностью 100–200 Вт и требуют сочетания приемников с высоким коэффициентом усиления, сигнальных микропроцессоров и транзисторов для работы так же эффективно, как и системы высокой мощности. Сложные микропроцессоры помогают устранить шум, обеспечивая более точное и детальное изображение неба. Кроме того, поскольку в системе меньше нарушений, маломощные радары можно использовать для обнаружения турбулентности с помощью эффекта Доплера. Поскольку маломощные системы работают при значительно меньшей мощности, они защищены от дуги и может использоваться практически в любое время. [67] [68]
Отслеживание грозы
[ редактировать ]
Цифровые радиолокационные системы обладают возможностями, значительно превосходящими их предшественников. Они предлагают наблюдение за отслеживанием гроз , которое дает пользователям возможность получать подробную информацию о каждом отслеживаемом грозовом облаке. Грозы идентифицируются путем сопоставления необработанных данных об осадках, полученных от импульса радара, с заранее запрограммированным шаблоном. Чтобы подтвердить грозу, она должна соответствовать строгим определениям интенсивности и формы, чтобы отличить ее от неконвективного облака. Обычно оно должно демонстрировать признаки горизонтальной организации и вертикальной непрерывности, а также иметь ядро или более интенсивный центр, идентифицируемый и отслеживаемый цифровыми радиолокационными устройствами слежения . [25] [69] После идентификации грозовой ячейки отслеживаются и записываются скорость, пройденное расстояние, направление и расчетное время прибытия (ETA).
Доплеровский радар и миграция птиц
[ редактировать ]Использование доплеровского метеорологического радара не ограничивается определением местоположения и скорости осадков . может отслеживать миграцию птиц Он также (раздел «Непогодные цели» ). Радиоволны бабочки радаров отражаются как от дождя, так и от птиц (или даже от насекомых, таких как ) . [70] [71] США Национальная метеорологическая служба , например, сообщила, что стаи птиц появляются на их радарах в виде облаков, а затем исчезают, когда птицы приземляются. [72] [73] Национальная метеорологическая служба США в Сент-Луисе даже сообщила о появлении бабочек-монархов на своих радарах. [74]
Различные программы в Северной Америке используют обычные метеорологические радары и данные специализированных радаров для определения маршрутов, высоты полета и времени миграций. [75] [76] Это полезная информация при планировании размещения и эксплуатации ветряных ферм для снижения смертности птиц, повышения авиационной безопасности и других мер по управлению дикой природой. В Европе были аналогичные разработки и даже комплексная программа прогнозирования авиационной безопасности, основанная на радиолокационном обнаружении. [77]
Обнаружение падения метеорита
[ редактировать ]
На изображении показано падение метеорита в Парк-Форест, штат Иллинойс, которое произошло 26 марта 2003 года. Красно-зеленая деталь в левом верхнем углу — это движение облаков возле самого радара, а следы падения метеоритов находятся внутри желтого эллипса на изображении. центр. Смешанные красные и зеленые пиксели обозначают турбулентность, в данном случае возникающую из-за падающих с высокой скоростью метеоритов.
По данным Американского метеоритного общества , падения метеоритов происходят ежедневно где-то на Земле. [78] Однако в базе данных метеоритных падений по всему миру , которую ведет Метеоритическое общество, обычно ежегодно регистрируется только около 10-15 новых падений метеоритов. [79]
Метеориты возникают, когда метеороид падает в атмосферу Земли, образуя оптически яркий метеор за счет ионизации и фрикционного нагрева. Если метеор достаточно большой и скорость падения достаточно низкая, выжившие метеориты достигнут земли. Когда падающие метеориты замедляются ниже примерно 2–4 км/с, обычно на высоте от 15 до 25 км, они больше не образуют оптически яркий метеор и переходят в «темный полет». [78] [80] Из-за этого большинство падений метеоритов происходит в океаны в течение дня или иным образом остается незамеченным. [78]
Именно в темноте полета падающие метеориты обычно попадают в зону взаимодействия большинства типов радаров. Было продемонстрировано, что можно идентифицировать падающие метеориты на изображениях метеорадиолокатора. [81] [82] [83] [84] [85] [86] Это особенно полезно для поиска метеоритов, поскольку метеорологические радары являются частью широкомасштабных сетей и постоянно сканируют атмосферу. Кроме того, метеориты вызывают локальную ветровую турбулентность, которая заметна на доплеровских данных, и падают почти вертикально, поэтому их место на земле находится близко к их радиолокационной сигнатуре.
Ссылки
[ редактировать ]- ^ Атлас, Дэвид , изд. (1990). Радар в метеорологии . Мемориал Баттана и 40-я юбилейная конференция по радиолокационной метеорологии. Бостон, Массачусетс: AMS . дои : 10.1007/978-1-935704-15-7 . ISBN 978-0-933876-86-6 . ISBN 978-1-935704-15-7 , 806 страниц, код AMS РАДМЕТ.
- ^ Дуглас, Р.Х. (2000). «Группа штормовой погоды» . Университет Макгилла . Архивировано из оригинала 6 июля 2011 года . Проверено 21 мая 2006 г.
- ^ Дуглас, Р.Х. (1990). «Глава 8 - Группа штормовой погоды (Канада)». В Атласе, Дэвид (ред.). Радар в метеорологии . Мемориал Баттана и 40-я юбилейная конференция по радиолокационной метеорологии. Бостон, Массачусетс: AMS . стр. 61–68. дои : 10.1007/978-1-935704-15-7 . ISBN 978-1-935704-15-7 .
- ^ «Сгруппированные экспонаты | иллюстрированные в основном | фотографии полетов | 1950 | 1758 | Архив полетов» .
- ^ «Первые метеорологические радиолокационные наблюдения за торнадическим эхо-сигналом» . Государственный университет Колорадо . 2008 год . Проверено 30 января 2008 г.
- ^ Меган Гарбер (29 октября 2012 г.). Дэн Разер показал по телевидению первое радиолокационное изображение урагана . Атлантика (Репортаж).
- ^ Перейти обратно: а б с Кобб, Сьюзен (29 октября 2004 г.). «Основное событие Национальной лаборатории сильных штормов в области разработки метеорадиолокаторов за первые 40 лет» . Журнал НОАА . Национальное управление океанических и атмосферных исследований . Архивировано из оригинала 15 февраля 2013 года . Проверено 7 марта 2009 г.
- ^ «Инструменты исследования NSSL: радар» . НССЛ. Архивировано из оригинала 14 октября 2016 года . Проверено 1 марта 2014 г.
- ^ Крозье, CL; Джо, частный детектив; Скотт, JW; Херскович, Х.Н.; Николс, Т.Р. (1991). «Оперативный доплеровский радар Кинг-Сити: разработка, всесезонное применение и прогнозирование» . Атмосфера-Океан . 29 (3): 479–516. дои : 10.1080/07055900.1991.9649414 .
- ^ «Информация о канадской радиолокационной сети» . Национальная радиолокационная программа . Окружающая среда Канады. 2002. Архивировано из оригинала 29 июня 2004 года . Проверено 14 июня 2006 г.
- ^ [url= http://ams.confex.com/ams/pdfpapers/96217.pdf ] Проект PANTHERE и эволюция французской оперативной радиолокационной сети и продуктов: оценка дождя, доплеровский ветер и двойная поляризация , Parent du Châtelet , Жак и др. Метео-Франс (2005 г.) 32-я конференция по радиолокации Американского метеорологического общества , Альбукерке, Нью-Мексико
- ^ Перейти обратно: а б Национальная метеорологическая служба (25 апреля 2013 г.). «Радар с двойной поляризацией: ступеньки к построению нации, готовой к погоде» . НОАА . Проверено 26 апреля 2013 г.
- ^ «Исторический запуск спутника Tomorrow.io открывает путь к революционному прогрессу в глобальном прогнозировании погоды» . Завтра.io . 14 мая 2023 г.
- ^ Олик, Диана (16 мая 2023 г.). «Компания, занимающаяся разведкой погоды, стремится произвести революцию в прогнозировании с помощью группировки радиолокационных спутников» . CNBC .
- ^ Перейти обратно: а б с д и ж г час я дж к л м н тот п д р с Довиак, Р.Дж. ; Зрнич, Д.С. (1993). Доплеровский радар и метеорологические наблюдения (2-е изд.). Сан-Диего, Калифорния: Академическая пресса. ISBN 978-0-12-221420-2 .
- ^ (на английском языке) «Пульсовый объем» . Словарь метеорологии . Американское метеорологическое общество. 2012 . Проверено 14 февраля 2021 г.
- ^ де Подеста, М (2002). Понимание свойств материи . ЦРК Пресс. п. 131. ИСБН 978-0-415-25788-6 .
- ^ Довиак, Р.Дж.; Зрнич, Д.С. (1993). «ATMS 410 – Радарная метеорология: распространение луча» (PDF) . Архивировано из оригинала (PDF) 15 июня 2010 года . Проверено 19 февраля 2013 г.
- ^ Аэробус (14 марта 2007 г.). «Информационные заметки к полету: Оптимальное использование метеорологического радара при неблагоприятных погодных условиях» (PDF) . СКАЙбрары. п. 2. Архивировано из оригинала (PDF) 31 мая 2011 года . Проверено 19 ноября 2009 г.
- ^ Скольник, Меррилл И. (22 января 2008 г.). «1.2» (PDF) . Справочник по радиолокации (3-е изд.). МакГроу-Хилл . ISBN 978-0-07-148547-0 . Проверено 1 апреля 2016 г.
- ^ Скольник, Меррилл И. (22 января 2008 г.). «19,2» (PDF) . Справочник по радарам (3-е изд.). МакГроу-Хилл. ISBN 978-0-07-148547-0 . Проверено 1 апреля 2016 г.
- ^ Яу, МК; Роджерс, Р.Р. (1989). Краткий курс физики облаков (3-е изд.). Баттерворт-Хайнеманн. ISBN 978-0-08-034864-3 .
- ^ Национальная метеорологическая служба. «Что означают цвета в отражающих изделиях?» . Часто задаваемые вопросы по радару WSR-88D . Национальное управление океанических и атмосферных исследований . Проверено 20 августа 2019 г.
- ^ Стоен, Хэл (27 ноября 2001 г.). «Воздушный метеорадиолокатор» . Указатель учебных пособий по авиации . stoenworks.com. Архивировано из оригинала 19 декабря 2002 года . Проверено 15 декабря 2009 г.
- ^ Перейти обратно: а б с Хаби, Джефф. «Зимний метеорологический радар» . Прогноз зимних осадков в Интернете . theweatherprediction.com . Проверено 14 декабря 2009 г.
- ^ «Карты типов осадков» . Виды карт . Погодная сеть . Архивировано из оригинала 24 марта 2010 года . Проверено 14 декабря 2009 г.
- ^ Перейти обратно: а б с Кэри, Ларри (2003). «Лекция по поляриметрическому радару» (PDF) . Техасский университет A&M . Архивировано из оригинала (PDF) 3 марта 2016 года . Проверено 21 мая 2006 г.
- ^ Шур, Терри. «Что измеряет поляриметрический радар?» . СИММС . Национальная лаборатория сильных штормов . Архивировано из оригинала 22 августа 2018 года . Проверено 19 апреля 2013 г.
- ^ «Вопросы и ответы по переходу на радар с двойной поляризацией» (PDF) . 3 августа 2012 года . Проверено 9 мая 2013 г.
- ^ Национальная метеорологическая служба. Вопросы и ответы по переходу на радар с двойной поляризацией (PDF) . НОАА . Проверено 18 апреля 2013 г.
- ^ Шур, Терри. «Как поляриметрические радиолокационные измерения могут привести к улучшению прогнозов погоды?» . СИММС . Национальная лаборатория сильных штормов . Архивировано из оригинала 22 августа 2018 года . Проверено 19 апреля 2013 г.
- ^ Шурр, Терри; Хайнзельман, П.; Шарфенберг, К. (октябрь 2003 г.). Обзор совместного эксперимента по поляризации (PDF) . НСЛ и CIMMS. Архивировано из оригинала (PDF) 3 марта 2016 года . Проверено 19 апреля 2013 г.
- ^ Фабри, Фредерик; Радарная обсерватория Дж. С. Маршалла . «Определение: двойная поляризация» . Университет Макгилла . Архивировано из оригинала 10 июня 2008 года . Проверено 18 апреля 2013 г.
- ^ Радарная обсерватория Дж. С. Маршалла . «Радарные изображения идентификатора цели PPI 0,5 градуса» . Университет Макгилла . Проверено 18 апреля 2013 г. [ постоянная мертвая ссылка ]
- ^ «Поляризационное разнообразие в радиолокационной обсерватории Макгилла» (стр.) . 7 сентября 2014 года . Проверено 8 марта 2022 г.
- ^ Рыжков; Джангранде; Краузе; Парк; Шур; Мельников. «Поляриметрическая классификация гидрометеоров и оценка количества осадков для лучшего обнаружения и прогнозирования сильных погодных явлений, включая внезапные наводнения» . Исследования и разработки доплеровских метеорологических радиолокаторов . СИММС . Архивировано из оригинала 3 июня 2009 года . Проверено 12 февраля 2009 г.
- ^ Довиак, Р.Дж.; Зрнич, Д.С. (1993). Доплеровский радар и метеорологические наблюдения . Сан-Диего, Калифорния: Academic Press. п. 562.
- ^ Правительство Канады (25 января 2012 г.). «Инфраструктура мониторинга погоды» . Окружающая среда Канады . Проверено 29 октября 2012 г.
- ^ Родитель Шатле, Жак; Метео-Франс ; и др. (2005). «Проект ПАНТЕРА» (PDF) . 32-я конференция по радиолокации, Альбукерке , Нью-Мексико . Американское метеорологическое общество .
- ^ Фабри, Фредерик (август 2010 г.). «Радиальная скорость CAPPI» . Примеры данных дистанционного зондирования по приборам . Радарная обсерватория Дж. С. Маршалла . Архивировано из оригинала 20 июня 2017 года . Проверено 14 июня 2010 г.
- ^ Харасти, Пол Р.; МакЭди, Колин Дж.; Додж, Питер П.; Ли, Вен-Чау; Таттл, Джон; Мурильо, Ширли Т.; Маркс, Фрэнк Д. младший (апрель 2004 г.). «Реализация в реальном времени методов однодоплеровского радиолокационного анализа тропических циклонов: усовершенствования алгоритма и использование с данными отображения WSR-88D» . Погода и прогнозирование . 19 (2): 219–239. Бибкод : 2004WtFor..19..219H . doi : 10.1175/1520-0434(2004)019<0219:RIOSRA>2.0.CO;2 .
- ^ «CAPPI: Индикатор положения плана на постоянной высоте» (PDF) . Руководство по продуктам и дисплеям IRIS: Настройка продуктов IRIS . СИГМЕТ. Ноябрь 2004 года . Проверено 9 июня 2009 г. [ постоянная мертвая ссылка ]
- ^ Национальная метеорологическая служба. «Презентация RIDGE торнадо в Джоплине 2011 года» . Национальное управление океанических и атмосферных исследований. Архивировано из оригинала 28 октября 2011 года . Проверено 12 июля 2011 г.
- ^ Доплеровский радар - RIDGE (интегрированный дисплей радара с геопространственными элементами) [ постоянная мертвая ссылка ] , Национальная метеорологическая служба (Техасское географическое общество – 2007 г.)
- ^ Национальная метеорологическая служба (31 января 2011 г.). «Загрузка радиолокационных изображений RIDGE» . Онлайн-школа погоды Jetstream . Национальное управление океанических и атмосферных исследований. Архивировано из оригинала 16 сентября 2011 года . Проверено 12 июля 2011 г.
- ^ Перейти обратно: а б с д и ж г «Распространенные ошибки при интерпретации радара» . Окружающая среда Канады. Архивировано из оригинала 30 июня 2006 года . Проверено 23 июня 2007 г.
- ^ Перейти обратно: а б Хербстер, Крис (3 сентября 2008 г.). «Аномальное распространение (AP)» . Введение в аномалии NEXRAD . Университет аэронавтики Эмбри-Риддла . Проверено 11 октября 2010 г.
- ^ Дайана Йейтс (2008). Новое исследование показывает, что по ночам птицы мигрируют вместе, рассредоточенными стаями. Университет Иллинойса в Урбане – Шампейне. Проверено 26 апреля 2009 г.
- ^ Барт Гертс и Дэйв Леон (2003). P5A.6 Мелкомасштабная вертикальная структура холодного фронта, обнаруженная бортовым радаром 95 ГГц. Университет Вайоминга . Проверено 26 апреля 2009 г.
- ^ Томас А. Низиол (1998). Загрязнение ветров VAD WSR-88D из-за миграции птиц: практический пример. Операционная записка WSR-88D Восточного региона № 12, август 1998 г. Проверено 26 апреля 2009 г.
- ^ Офис Национальной метеорологической службы, Буффало, штат Нью-Йорк (8 июня 2009 г.). «Помехи от ветряных электростанций, обнаруживаемые на доплеровском радаре» . Национальное управление океанических и атмосферных исследований. Архивировано из оригинала 20 июня 2009 года . Проверено 1 сентября 2009 г.
- ^ Ламмерс, Дирк (29 августа 2009 г.). «Ветровые электростанции могут показаться синоптикам зловещими» . Хьюстонские хроники . Ассошиэйтед Пресс . Архивировано из оригинала 31 августа 2009 года . Проверено 1 сентября 2009 г.
- ^ Тестуд, Дж.; Ле Буар, Э.; Облигис, Э.; Али-Мехенни, М. (2000). «Алгоритм профилирования дождя применительно к поляриметрическому метеорологическому радару» . Дж. Атмос. Океанические технологии . 17 (3): 332–356. Бибкод : 2000JAtOT..17..332T . doi : 10.1175/1520-0426(2000)017<0332:TRPAAT>2.0.CO;2 .
- ^ Вульпиани, Г.; Табари, П.; Пар-дю-Шатле, Ж.; Марцано, ФС (2008). «Сравнение передовых радиополяриметрических методов оперативной коррекции затухания в диапазоне C» . Дж. Атмос. Океанические технологии . 25 (7): 1118–1135. Бибкод : 2008JAtOT..25.1118V . дои : 10.1175/2007JTECHA936.1 . S2CID 55123714 .
- ^ Кэри, Л.Д.; Ратледж, ЮАР; Агиевич Д.А.; Кинан, Т.Д. (2000). «Коррекция эффектов распространения при поляриметрических радиолокационных наблюдениях тропической конвекции C-диапазона с использованием дифференциальной фазы распространения». Дж. Прил. Метеорол . 39 (9): 1405–1433. Бибкод : 2000JApMe..39.1405C . CiteSeerX 10.1.1.324.4101 . doi : 10.1175/1520-0450(2000)039<1405:CPEICB>2.0.CO;2 .
- ^ Джошил, Шашанк С (2023). «Коррекция затухания в метеорологических радарах для снега». Транзакции IEEE по геонаукам и дистанционному зондированию . 61 : 1–14. Бибкод : 2023ITGRS..6154555J . дои : 10.1109/TGRS.2023.3254555 . S2CID 257448887 .
- ^ Перейти обратно: а б «Привезенная группа» . Словарь метеорологии . Американское метеорологическое общество . Проверено 21 февраля 2022 г.
- ^ Лемон, Лесли Р. (июнь 1998 г.). «Радар «Всплеск рассеяния трех тел»: оперативный признак крупного града». Погода и прогнозирование . 13 (2): 327–340. Бибкод : 1998WtFor..13..327L . doi : 10.1175/1520-0434(1998)013<0327:TRTBSS>2.0.CO;2 . ISSN 1520-0434 .
- ^ Голбон-Хагиги, Миннесота; Чжан Г. (июль 2019 г.). «Обнаружение помех от земли для метеорологического радара с двойной поляризацией с использованием новой трехмерной дискриминантной функции» . Журнал атмосферных и океанических технологий . 36 (7): 1285–1296. Бибкод : 2019JAtOT..36.1285G . doi : 10.1175/JTECH-D-18-0147.1 .
- ^ Голбон-Хагиги, Миннесота; Чжан Г.; Ли Ю.; Довиак Р. (июнь 2016 г.). «Обнаружение помех от земли с помощью метеорадиолокатора с использованием метода двойной поляризации и двойного сканирования» . Атмосфера . 7 (6): 83. Бибкод : 2016Атмос...7...83Г . дои : 10.3390/atmos7060083 .
- ^ Перейти обратно: а б Дэвид, Маклафлин; и др. (декабрь 2009 г.). «Коротковолновая технология и потенциал распределенных сетей малых радиолокационных систем». Бюллетень Американского метеорологического общества . 90 (12): 1797–1817. Бибкод : 2009BAMS...90.1797M . CiteSeerX 10.1.1.167.2430 . дои : 10.1175/2009BAMS2507.1 . ISSN 1520-0477 . S2CID 2391544 .
- ^ «Список лекций по CASA» . Американское метеорологическое общество . 2005 . Проверено 31 августа 2010 г.
- ^ «RPG SW BUILD 10.0 – ВКЛЮЧАЕТ ОТЧЕТЫ ДЛЯ SW 41 RDA» . Центр радиолокационной эксплуатации . Национальное управление океанических и атмосферных исследований.
- ^ Поддержка WDT (7 июля 2015 г.). «Что такое режим SAILS» . Радарскоп . Архивировано из оригинала 4 февраля 2017 года . Проверено 9 февраля 2017 г.
- ^ Национальная лаборатория сильных штормов. «Новая радиолокационная технология может увеличить время предупреждения о торнадо» (PDF) . Национальное управление океанических и атмосферных исследований. Архивировано из оригинала (PDF) 27 мая 2010 года . Проверено 29 сентября 2009 г.
- ^ Оцука, Сигенори; Туэрхонг, Гуланбайер; Кикучи, Рёта; Китано, Ёсиказу; Танигучи, Юсуке; Руис, Хуан Хосе; Сато, Синсуке; Ушио, Томоо; Миёси, Такемаса (февраль 2016 г.). «Прогноз осадков с помощью трехмерной пространственно-временной экстраполяции данных метеорологических радиолокационных наблюдений с плотной и частой фазированной решеткой». Погода и прогнозирование . 31 (1): 329–340. Бибкод : 2016WtFor..31..329O . дои : 10.1175/WAF-D-15-0063.1 . ISSN 0882-8156 .
- ^ Перейти обратно: а б Корпорация Бендикс. Отдел авионики. Метеолокационная система РДР-1200. Ред. июль/73 изд. Форт-Лодердейл: Бендикс, отдел авионики, 1973 г.
- ^ Барр, Джеймс К. Бортовой метеорологический радар. 1-е изд. Эймс: Университет штата Айова, 1993.
- ^ «IntelliWeather StormPredator» . IntelliWeather Inc. 2008. Архивировано из оригинала 5 декабря 2011 года . Проверено 26 ноября 2011 г.
- ^ «Обнаружение птиц с помощью доппларового радара» . srh.noaa.gov . Архивировано из оригинала 30 октября 2015 года . Проверено 9 ноября 2015 г.
- ^ Дайана Йейтс (2008). «Птицы мигрируют вместе по ночам в рассредоточенных стаях, показывает новое исследование» . Урбана – Шампейн, Иллинойс: Университет Иллинойса . Проверено 9 ноября 2015 г.
- ^ «Как миграция птиц красиво отображается на доплеровском радаре» . Смитсоновский институт.com . Проверено 9 ноября 2015 г.
- ^ «Наблюдение за миграцией птиц с помощью допплера» . блог аба . 10 апреля 2011 года . Проверено 9 ноября 2015 г.
- ^ «Рой бабочек замечен на метеорологическом радаре» .
- ^ Диль, Роберт Х.; Ларкин, Рональд П.; Блэк, Джон Э. (апрель 2003 г.). «Радиолокационные наблюдения за миграцией птиц над Великими озерами». Аук . 120 (2): 278–290. doi : 10.1642/0004-8038(2003)120[0278:ROOBMO]2.0.CO;2 . ISSN 1938-4254 . S2CID 86080517 .
- ^ Ганьон, Франсуа; Белиль, Марк; Ибарсабал, Жак; Вайанкур, Пьер; Савар, Жан-Пьер Л. (январь 2010 г.). «Сравнение ночного слухового подсчета воробьиных и отражательной способности канадского радара наблюдения за погодой» (PDF) . Аук . 127 (1): 119–128. дои : 10.1525/аук.2009.09080 . ISSN 1938-4254 . S2CID 84619921 .
- ^ «Модуль прогнозирования миграции птиц FlySafe» . /www.flysafe-birdtam.eu . Архивировано из оригинала 20 ноября 2015 года . Проверено 9 ноября 2015 г. .
- ^ Перейти обратно: а б с «Часто задаваемые вопросы по огненным шарам» . Американское метеорное общество . Проверено 28 февраля 2017 г.
- ^ «Метеоритический бюллетень: поиск в базе данных» . www.lpi.usra.edu . Проверено 28 февраля 2017 г.
- ^ «Огненные шары и метеориты» . Международная Метеорная Организация . 2023 . Проверено 12 мая 2023 г.
- ^ Фрис, Марк; Фрис, Джеффри (1 сентября 2010 г.). «Доплеровский метеорологический радар как инструмент поиска метеоритов» . Метеоритика и планетология . 45 (9): 1476–1487. Бибкод : 2010M&PS...45.1476F . дои : 10.1111/j.1945-5100.2010.01115.x . ISSN 1945-5100 .
- ^ Браун, П.; Маккосленд, PJA; Фрис, М.; Зильбер, Э.; Эдвардс, Западная Нью-Йорк; Вонг, ДК; Верик, Р.Дж.; Фрайс, Дж.; Кшеминский, З. (1 марта 2011 г.). «Падение метеорита Гримсби - I: динамика огненного шара и орбита по данным радаров, видео и инфразвуковых записей» . Метеоритика и планетология . 46 (3): 339–363. Бибкод : 2011M&PS...46..339B . дои : 10.1111/j.1945-5100.2010.01167.x . ISSN 1945-5100 .
- ^ Дженнискенс, Питер; Фрис, Марк Д.; Инь, Цин-Чжу; Золенский, Михаил; Крот, Александр Н.; Сэндфорд, Скотт А.; Сирс, Дерек; Бофорд, Роберт; Эбель, Дентон С. (21 декабря 2012 г.). «Радарное обнаружение метеорита Саттерс Милл, углеродистого хондрита, реголита, брекчии». Наука . 338 (6114): 1583–1587. Бибкод : 2012Sci...338.1583J . дои : 10.1126/science.1227163 . hdl : 2060/20140017286 . ISSN 0036-8075 . ПМИД 23258889 . S2CID 206543838 .
- ^ Фрайс, доктор медицины; Фрис, Дж. А. (1 сентября 2010 г.). «Наблюдения метеорита на юго-западе Висконсина 14 апреля 2010 года с помощью доплеровского метеорологического радара». Приложение по метеоритике и планетологии . 73 : 5365. Бибкод : 2010M&PSA..73.5365F .
- ^ Фрис, М.; Фрайс, Дж. (1 марта 2010 г.). «Переменная облачность, возможны хондриты — изучение падения метеорита с помощью доплеровского метеорологического радара». Конференция по науке о Луне и планетах . 41 (1533): 1179. Бибкод : 2010LPI....41.1179F .
- ^ Фрис, М.; Фрис, Дж.; Шефер, Дж. (1 марта 2011 г.). «Вероятное падение неисследованного метеорита обнаружено в архивных данных метеорологического радара». Конференция по науке о Луне и планетах . 42 (1608): 1130. Бибкод : 2011LPI....42.1130F .
Библиография
[ редактировать ]- Атлас, Дэвид , изд. (1990). Радар в метеорологии . Мемориал Баттана и 40-я юбилейная конференция по радиолокационной метеорологии. Бостон, Массачусетс: Американское метеорологическое общество . дои : 10.1007/978-1-935704-15-7 . ISBN 978-0-933876-86-6 . ISBN 978-1-935704-15-7 , 806 страниц, код AMS РАДМЕТ.
- Бланшар, Ив (2004). Радар, 1904–2004: история века технических и эксплуатационных инноваций (на французском языке). Париж, Франция: Эллипсы. ISBN 2-7298-1802-2 .
- Довиак, Р.Дж.; Зрнич, Д.С. (1993). Доплеровский радар и метеорологические наблюдения . Сан-Диего, Калифорния: Второе издание Academic Press. п. 562.
- Ганн, КЛС; Восток, TWR (1954). «Микроволновые свойства частиц осадков». Ежеквартальный журнал Королевского метеорологического общества . 80 : 522–545.
- Яу, МК; Роджерс, Р.Р. (1 января 1989 г.). Краткий курс физики облаков, третье издание . Баттерворт-Хайнеманн. стр. 304 страницы. ISBN 9780750632157 . ISBN 0-7506-3215-1
- Рипези, П. (2023). «Автоматическая идентификация кучево-дождевых и высоких кучевых облаков на основе данных итальянской сети метеорадиолокаторов». Погода . дои : 10.1002/wea.4482 .
- Вакимото, Роджер М.; Шривастава, Рамеш (август 2003 г.). Радар и наука об атмосфере: Сборник очерков в честь Дэвида Атласа . Метеорологическая монография. Том. 30. Бостон: Американское метеорологическое общество. п. 270. ИСБН 1-878220-57-8 . ; Код АМС ММ52.
- Бринги, В.Н.; Чандрасекар, В. (2001). Поляриметрический доплеровский метеорологический радиолокатор . Нью-Йорк, США: Издательство Кембриджского университета. ISBN 0-521-01955-9 .
- История оперативного использования метеорологического радара Метеорологической службой США:
- Уитон, Роджер К.; Смит, Пол Л.; Биглер, Стюарт Г.; Уилк, Кеннет Э.; Харбак, Альберт К. (февраль 1998 г.). «Часть I: Эра до NEXRAD» . Погода и прогнозирование . 13 (2): 219–243. doi : 10.1175/1520-0434(1998)013<0219:HOOUOW>2.0.CO;2 .
- Уитон, Роджер К.; Смит, Пол Л.; Биглер, Стюарт Г.; Уилк, Кеннет Э.; Харбак, Альберт К. (февраль 1998 г.). «Часть II: Разработка оперативных доплеровских метеорологических радиолокаторов» . Погода и прогнозирование . 13 (2): 244–252. doi : 10.1175/1520-0434(1998)013<0244:HOOUOW>2.0.CO;2 . S2CID 123719565 .
- «Основные метеорологические радары за первые 40 лет существования NSSL» . Выделять . Национальной лаборатории сильных штормов Первые 40 лет существования . Проверено 15 марта 2021 г.
См. также
[ редактировать ]Похожие статьи
[ редактировать ]- Австралийские метеорологические радары
- обратное рассеяние
- Полюс парикмахера
- Lockheed WP-3D Орион (P-3)
- Национальная лаборатория исследования ураганов
Внешние ссылки
[ редактировать ]Общий
[ редактировать ]- «Атмосфера, погода и полет (Метеоральные радары, глава 19)» (PDF) . Окружающая среда и изменение климата, Канада . Архивировано (PDF) из оригинала 7 августа 2016 года . Проверено 5 января 2021 г.
- «Распространенные ошибки при интерпретации радара» . Окружающая среда и изменение климата, Канада . Проверено 5 января 2021 г.
- «Понимание метеорологического радара» . Погода Метро на радаре . Проверено 5 января 2021 г.
- Джефф Дуда. «Как использовать и интерпретировать доплеровский метеорологический радар» (PDF) . Университет штата Айова . Проверено 5 января 2021 г.
Сети и радиолокационные исследования
[ редактировать ]- Центр атмосферных радиолокационных исследований Университетского университета
- Канадский метеорологический радар: часто задаваемые вопросы
- Домашняя страница радара Макгилла
- Галерея радарных изображений Гонконга
- Двойной поляриметрический исследовательский радар C-диапазона Университета Алабамы в Хантсвилле
- Информация о сети доплеровских радаров NEXRAD: Инструменты исследования: радар с двойной поляризацией
- Совместный эксперимент по поляризации - исследования и разработки двойной поляризации Университета Оклахомы
Данные в реальном времени
[ редактировать ]- Африка
- Южная Африка — метеорологический радар в реальном времени для Южной Африки от метеорологической службы Южной Африки.
- Америка
- Аруба (через Каракас)
- Белиз
- Барбадос ( карибский составной )
- Окружающая среда Канады
- Каймановы острова
- Куба
- Кюрасао ( Карибский композитный )
- Радарные станции Сальвадор Марн
- Заморские департаменты Франции ( Гваделупа , Мартиника )
- Французская Гайана
- Ямайка
- Пуэрто-Рико
- Тринидад
- Национальная метеорологическая служба США
- Азия
- Австралия и Океания
- Европа