Магнитный подшипник

— Магнитный подшипник это тип подшипника , который поддерживает нагрузку с помощью магнитной левитации . Магнитные подшипники поддерживают движущиеся части без физического контакта. Например, они способны поднимать вращающийся вал и обеспечивать относительное движение с очень низким трением и без механического износа . Магнитные подшипники поддерживают самые высокие скорости среди всех типов подшипников и не имеют максимальной относительной скорости.
Активные подшипники имеют ряд преимуществ: они не подвержены износу, имеют низкое трение и часто могут автоматически компенсировать неравномерности распределения массы, позволяя роторам вращаться вокруг своего центра масс с очень низкой вибрацией.
Пассивные магнитные подшипники используют постоянные магниты и, следовательно, не требуют никакой входной мощности, но их сложно спроектировать из-за ограничений, описанных теоремой Эрншоу . Техники использования диамагнитных материалов относительно неразвиты и сильно зависят от характеристик материалов. В результате большинство магнитных подшипников являются активными магнитными подшипниками, в которых используются электромагниты , требующие непрерывной подачи энергии и активной системы управления для поддержания стабильности нагрузки. В комбинированной конструкции часто используются постоянные магниты для передачи статической нагрузки, а активный магнитный подшипник используется, когда левитирующий объект отклоняется от оптимального положения. Магнитные подшипники обычно требуют наличия резервного подшипника на случай сбоя питания или системы управления.
Магнитные подшипники используются в ряде промышленных применений, таких как производство электроэнергии , переработка нефти, работа станков и транспортировка природного газа. Они также используются в центрифугах типа Zippe , [1] для обогащения урана и в турбомолекулярных насосах , где подшипники с масляной смазкой будут источником загрязнения.
Дизайн
[ редактировать ]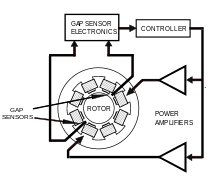
Активный магнитный подшипник работает по принципу электромагнитного подвеса, основанному на индукции вихревых токов во вращающемся проводнике . Когда электропроводящий материал движется в магнитном поле , ток в материале генерируется , который противодействует изменению магнитного поля (известный как закон Ленца ). Это генерирует ток, который приводит к возникновению магнитного поля, ориентированного противоположно полю магнита . Таким образом, электропроводящий материал действует как магнитное зеркало . [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [ чрезмерное цитирование ]
Аппаратное обеспечение состоит из блока электромагнитов , набора усилителей мощности, которые подают ток на электромагниты, контроллера и датчиков зазора с соответствующей электроникой для обеспечения обратной связи, необходимой для управления положением ротора внутри зазора. Усилитель мощности подает равный ток смещения на две пары электромагнитов на противоположных сторонах ротора. Это постоянное перетягивание каната осуществляется контроллером, который компенсирует ток смещения равными и противоположными возмущениями тока, когда ротор отклоняется от своего центрального положения.
Датчики зазора обычно имеют индуктивную природу и работают в дифференциальном режиме. Усилители мощности в современном коммерческом применении представляют собой полупроводниковые устройства, работающие в конфигурации с широтно-импульсной модуляцией . Контроллер обычно представляет собой микропроцессор или процессор цифровых сигналов .
В магнитных подшипниках обычно присутствуют два типа нестабильности. Притягивающие магниты создают нестабильную статическую силу, которая уменьшается с увеличением расстояния и увеличивается с уменьшением расстояния. Это может привести к разбалансировке подшипника. Во-вторых, поскольку магнетизм является консервативной силой , он обеспечивает небольшое демпфирование; колебания могут привести к потере успешной подвески, если присутствуют какие-либо движущие силы.
История
[ редактировать ]В таблице ниже перечислены несколько ранних патентов на активные магнитные подшипники. Можно найти более ранние патенты на магнитные подвески, но они здесь исключены, поскольку они состоят из сборок постоянных магнитов с проблематичной стабильностью в соответствии с теоремой Эрншоу .
| Изобретатель(и) | Год | Номер патента | Заголовок |
|---|---|---|---|
| Бимс, Холмс | 1941 | 2,256,937 | Подвеска вращающихся тел |
| Балки | 1954 | 2,691,306 | Вращающиеся тела с магнитной опорой |
| Гилберт | 1955 | 2,946,930 | Магнитная подвеска |
| Балки | 1962 | 3,041,482 | Устройство для вращения свободно подвешенных тел. |
| Балки | 1965 | 3,196,694 | Магнитная подвесная система |
| Волк | 1967 | 3,316,032 | Многофазный магнитно-подвесной трансформатор |
| Боден и др. | 1968 | DE1750602 | Магнитное хранилище (патент Германии) |
| Лиман | 1971 | 3,565,495 | Аппарат магнитной подвески |
| Хаберман | 1973 | 3,731,984 | Устройство магнитного подшипникового блока для поддержки вертикального вала, приспособленное для вращения с высокой скоростью |
| Хаберманн, Лойен, Жоли, Обер | 1974 | 3,787,100 | Устройства, включающие вращающиеся элементы, поддерживаемые магнитными подшипниками |
| Хаберманн, Брюне | 1977 | 4,012,083 | Магнитные подшипники |
| Хаберманн, Брюне, ЛеКлер | 1978 | 4,114,960 | Устройство обнаружения радиального смещения магнитных подшипников |
| Крут, Эстель | 1990 | 1,988,024,350 | Дальнейшие улучшения магнитных подшипников |
| Микс, Кроуфорд Р. | 1992 | 5,111,102 | Магнитная несущая конструкция |
| Крут, Эстель | 1994 | 1,991,075,982 | Нелинейный магнитный подшипник |
Джесси Бимс из Университета Вирджинии подал одни из первых патентов на активные магнитные подшипники. [12] [13] во время Второй мировой войны. Патенты касались ультрацентрифуг, предназначенных для обогащения изотопов элементов, необходимых для Манхэттенского проекта . Однако магнитные подшипники не были развиты до тех пор, пока не были достигнуты успехи в области твердотельной электроники и современных компьютерных технологий управления, благодаря работе Хабермана. [14] и Швейцер. [15] В 1987 году Эстель Крут усовершенствовала технологию активных магнитных подшипников. [16] но эти конструкции не были изготовлены из-за дороговизны производства, в котором использовалась лазерная система наведения. Исследования Эстель Крут были предметом трех австралийских патентов [4] и финансировались Nachi Fujikoshi, Nippon Seiko KK и Hitachi, а ее расчеты использовались в других технологиях, в которых использовались редкоземельные магниты , но активные магнитные подшипники были разработаны только для Стадия прототипа. Крута [17] Конструкция также включала усовершенствованную компьютеризированную систему управления, а последняя конструкция представляла собой нелинейный магнитный подшипник.
Касарда [18] подробно рассматривает историю активных магнитных подшипников. Она отмечает, что первое коммерческое применение активных магнитных подшипников было в турбомашиностроении . Активный магнитный подшипник позволил устранить масляные резервуары на компрессорах газопровода NOVA Gas Transmission Ltd. (NGTL) в Альберте, Канада. Это снизило пожароопасность, что позволило существенно сократить расходы на страхование. Успех этих установок с магнитными подшипниками побудил NGTL стать пионером в исследовании и разработке цифровой системы управления магнитными подшипниками в качестве замены аналоговых систем управления, поставляемых американской компанией Magnetic Bearings Inc. В 1992 году группа исследования магнитных подшипников NGTL сформировала компанию. Revolve Technologies Inc. [5] за коммерциализацию технологии цифровых магнитных подшипников. Позже компания была приобретена SKF шведской . Французская компания S2M , основанная в 1976 году, первой выпустила на коммерческий рынок активные магнитные подшипники. Обширные исследования магнитных подшипников продолжаются в Университет Вирджинии в программе промышленных исследований вращающихся машин и средств управления [6] .
В течение десятилетия, начавшегося в 1996 году, голландская нефтегазовая компания NAM установила двадцать газовых компрессоров, каждый из которых приводится в движение электродвигателем с регулируемой скоростью мощностью 23 мегаватта. Каждый агрегат был полностью оснащен активными магнитными подшипниками как на двигателе, так и на компрессоре. Эти компрессоры используются на газовом месторождении Гронинген для извлечения оставшегося газа из этого крупного газового месторождения и увеличения производительности месторождения. Проектирование мотор-компрессора было выполнено компанией Siemens, а активные магнитные подшипники были поставлены компанией Waukesha Bearings (принадлежит Dover Corporation ). (Первоначально эти подшипники были разработаны компанией Glacier, позже эта компания была поглощена Federal Mogul и теперь является частью Waukesha Bearings.) Используя активные магнитные подшипники и прямой привод между двигателем и компрессором (без промежуточного редуктора) и применение сухих газовых уплотнений позволило получить полностью сухую (безмасляную) систему. Применение активных магнитных подшипников как в приводе, так и в компрессоре (по сравнению с традиционной конфигурацией с использованием шестерен и шарикоподшипников) приводит к созданию относительно простой системы с очень широким рабочим диапазоном и высокой эффективностью, особенно при частичной нагрузке. Как это было сделано на месторождении в Гронингене, всю установку можно дополнительно разместить на открытом воздухе без необходимости строительства большого компрессорного здания.
Бесконтактные подшипники с постоянными магнитами и электродвижущей стабилизацией были поданы на патент Р.Г. Гилбертом в 1955 году (патент США 2946930). [19] и К. Боден, Д. Шеффер в 1968 г. (патент Германии 1750602). [20] Эти изобретения обеспечивают технологическую основу для ряда практических применений, некоторые из которых дошли до стадии промышленного серийного производства по лицензии Forschungszentrum Jülich примерно с 1980 года. [21] [22]
Микс [23] впервые разработала конструкцию гибридных магнитных подшипников (патент США 5,111,102), в которой постоянные магниты создают поле смещения, а катушки активного управления используются для обеспечения стабильности и динамического управления. Эти конструкции, использующие постоянные магниты для создания полей смещения, меньше и легче, чем чисто электромагнитные подшипники. Электронная система управления также меньше по размеру и требует меньше электроэнергии, поскольку поле смещения создается постоянными магнитами.
По мере развития необходимых компонентов научный интерес к этой области также возрастал, достигнув своего пика на первом Международном симпозиуме по магнитным подшипникам, состоявшемся в 1988 году в Цюрихе, когда профессором Швейцером ( ETHZ ) было основано Международное общество магнитных подшипников. Аллер (Университет Вирджинии) и профессор Окада (Университет Ибараки). С тех пор симпозиум превратился в серию конференций, проводимых раз в два года, с постоянным порталом по технологии магнитных подшипников [7] , где доступны все материалы симпозиума. Веб-портал поддерживается международным исследовательским и промышленным сообществом. В 2012 году в Зал славы и получили награды за выдающиеся заслуги профессор Йоджи Окада, профессор Герхард Швейцер и Майкл Суонн из компании Waukesha Magnetic Bearings [8] .
Приложения
[ редактировать ]Преимущества магнитных подшипников включают очень низкое и предсказуемое трение, а также способность работать без смазки и в вакууме. Магнитные подшипники все чаще используются в промышленных машинах, таких как компрессоры, турбины, насосы, двигатели и генераторы.
Магнитные подшипники обычно используются электроэнергетическими предприятиями в счетчиках ватт-часов для измерения энергопотребления в доме. Они также используются в приложениях хранения или транспортировки энергии, а также для поддержки оборудования в вакууме, например, в хранения энергии с маховиком . системах [24] [25] Маховик в вакууме имеет очень низкие потери на сопротивление ветру, но обычные подшипники обычно быстро выходят из строя в вакууме из-за плохой смазки. Магнитные подшипники также используются для поддержки поездов на магнитной подвеске , чтобы обеспечить низкий уровень шума и плавность хода за счет устранения поверхностей физического контакта. К недостаткам можно отнести высокую стоимость, большой вес и относительно большие размеры.
Магнитные подшипники также используются в некоторых центробежных компрессорах для чиллеров, в которых вал из магнитного материала находится между магнитными подшипниками. Небольшой ток обеспечивает магнитную левитацию вала, который остается свободно подвешенным в воздухе, обеспечивая нулевое трение между подшипником и валом.
Среди наиболее важных промышленных применений — турбомолекулярные насосы для создания вакуума на заводах по производству полупроводников. Первые коммерческие турбонасосы с магнитными подшипниками без механической стабилизации были проданы компанией Leybold AG в 1975 году (электромагнитные) и в 1989 году (на основе постоянных магнитов).
В области вакуумной метрологии манометр с вращающимся ротором (SRG) был представлен в качестве эталона BIPM в Париже в 1979 году. Первая лабораторная установка этого манометра была установлена Джесси Бимсом в 1946 году. Коммерческое серийное производство началось в 1980 году по лицензии Forschungszentrum. Юлих. SRG имеет важное значение для управления вакуумными процессами в оборудовании для производства полупроводников.
Новое применение магнитных подшипников – искусственные сердца. Использование магнитной подвески в желудочковых вспомогательных устройствах было впервые использовано профессором Полом Аллером и профессором Хьюстоном Вудом из Университета Вирджинии, кульминацией которого стал первый желудочковый вспомогательный центробежный насос ( VAD ) с магнитной подвеской в 1999 году. [ нужна ссылка ]
В некоторых желудочковых вспомогательных устройствах используются магнитные подшипники, в том числе сердечный насос LifeFlow, [26] система помощи левому желудочку DuraHeart, [27] Левитроникс ЦентриМаг, [28] и Сердце Берлина . [29] В этих устройствах единственная движущаяся часть подвешивается за счет сочетания гидродинамической силы и магнитной силы. Устраняя поверхности физического контакта, магнитные подшипники облегчают уменьшение областей высокого напряжения сдвига (что приводит к повреждению эритроцитов) и застоя потока (что приводит к свертыванию крови) в этих кровяных насосах. [30] Berlin Heart INCOR было первым коммерческим желудочковым вспомогательным устройством без механической или гидродинамической стабилизации.
Calnetix Technologies , Synchrony Magnetic Bearings (дочерняя компания Johnson Controls International), Waukesha Magnetic Bearings и S2M (дочерняя компания SKF) входят в число крупнейших разработчиков и производителей магнитных подшипников во всем мире.
Будущие достижения
[ редактировать ]
Благодаря использованию системы левитации на основе индукции, присутствующей в технологиях магнитной подвески , таких как система Inductrack , магнитные подшипники могут заменить сложные системы управления с использованием матриц Хальбаха и простых катушек с замкнутым контуром. Эти системы выигрывают в простоте, но менее выгодны с точки зрения потерь на вихревые токи . Для вращающихся систем вместо мультипольных структур Хальбаха можно использовать униполярные магниты, что значительно снижает потери.
Примером, который позволил обойти проблемы теоремы Эрншоу, является униполярный электродинамический подшипник, изобретенный доктором Торбьёрном Лембке. [31] [32] [33] Это новый тип электромагнитного подшипника, основанный на пассивной магнитной технологии. Для его работы не требуется никакой управляющей электроники, и он работает, поскольку электрические токи, генерируемые движением, вызывают восстанавливающую силу. [34] [35] [36]
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Чарльз, Д., Возвращение ядерного оружия , Science, Vol. 315, (30 марта 2007 г.)
- ^ Басор П.А., «Пассивная стабилизация магнитных подшипников маховика», магистерская диссертация, Массачусетский технологический институт (США), 1980.
- ^ Мураками К. и Сато И., «Эксперименты с очень простым радиально-пассивным магнитным подшипником на основе вихревых токов», в материалах 7-го Международного симпозиума по магнитным подшипникам, март 2000 г.
- ^ Бендер Д. и Пост РФ, «Пассивные магнитные подшипники при температуре окружающей среды для систем хранения энергии маховика», В материалах 7-го Международного симпозиума по магнитным подшипникам, март 2000 г.
- ^ Мозер Р., Регамей Ю.Дж., Сандтнер Дж. и Блейлер Х., «Пассивная диамагнитная левитация для маховиков», В материалах 8-го Международного симпозиума по магнитным подшипникам, 2002.
- ^ Филатов А.В., МакМаллен П., Дэйви К. и Томпсон Р., «Маховиковая система накопления энергии с униполярным электродинамическим магнитным подшипником», В материалах 10-го Международного симпозиума по магнитным подшипникам, 2006.
- ^ Сандтнер Дж. и Блейлер Х., «Электродинамические пассивные магнитные подшипники с плоскими матрицами Хальбаха», В материалах 9-го Международного симпозиума по магнитным подшипникам, август 2004 г.
- ^ Сандтнер Дж. и Блейлер Х., «Пассивный электродинамический магнитный упорный подшипник, специально разработанный для приложений с постоянной скоростью», в материалах 10-го Международного симпозиума по магнитным подшипникам, август 2004 г.
- ^ Амати Н., Де Лепин X. и Тоноли А., «Моделирование электродинамических подшипников», Журнал ASME по вибрации и акустике, 130, 2008.
- ^ Клюйскенс В., Дехез Б., «Динамическая электромеханическая модель пассивных магнитных подшипников», IEEE Transactions on Magnetics, 43, стр. 3287-3292, 2007.
- ^ Клюскенс В., Дехез Б., «Параметризованная электромеханическая модель магнитных подшипников с индуцированными токами», Журнал системного дизайна и динамики - специальный выпуск одиннадцатого международного симпозиума по магнитным подшипникам, 2009 г. [1] [ постоянная мертвая ссылка ]
- ^ Бимс, Дж., Производство и использование высокоцентробежных полей , Science, Vol. 120, (1954)
- ^ Бимс, Дж., Магнитные подшипники , документ 810A, Конференция автомобильной инженерии, Детройт, Мичиган, США, SAE (январь 1964 г.)
- ^ Хаберманн, Х., Лиард, Г. Практические магнитные подшипники , IEEE Spectrum, Vol. 16, № 9 (сентябрь 1979 г.)
- ^ Швейцер, Г., Характеристики магнитного подшипника ротора для активного контроля вибрации , Документ C239/76, Первая международная конференция по вибрациям во вращающемся оборудовании, (1976).
- ^ Эстель Крут, Австралийский еженедельник изобретателей , Ассоциация изобретателей Нового Южного Уэльса, Vol. 3 (апрель 1987 г.)
- ^ Савсан Ахмед Эльхури Ахмед, Нуха Абдаллах Мохаммед Бабкер и Мохамед Тум Фадель, «Исследование классов магнетизма», IJISET - Международный журнал инновационной науки, техники и технологий, Vol. 6 Выпуск 4, 2348 – 7968, (2019).
- ^ Касарда, М. Обзор технологий и применений активных магнитных подшипников , The Shock and Vibration Digest, Vol.32, No. 2: Публикация Информационного центра по ударам и вибрации, Военно-морская исследовательская лаборатория (март 2000 г.)
- ^ Р. Г. Гилберт, «Магнитная подвеска» [2] 1955 г.
- ^ К. Боден, Д. Шеффер, «Магнитное хранилище» [3] 1968 г.
- ^ Йохан К. Фремери, «Постоянные магнитные подшипники» , ноябрь 2000 г. (на немецком языке)
- ^ Йохан К. Фремери, «Подшипники с постоянными магнитами» , март 2019 г.
- ^ Микс, CR, «Магнитные подшипники - оптимальная конструкция и применение», Бумага представлен на Международном семинаре по постоянным магнитам из редкоземельного кобальта, Дейтонский университет, Дейтон, Огайо, 14–17 октября 1974 г.
- ^ Йохан К. Фремери и Майкл Колк (1999) «Маховик мощностью 500 Втч на подшипниках с постоянными магнитами»
- ^ Ли, Сяоцзюнь; Анвари, Бахар; Палаццоло, Алан; Ван, Чжиян; Толият, Хамид (14 августа 2018 г.). «Система хранения энергии с маховиком коммунального назначения с безвальным, безвтулочным, высокопрочным стальным ротором» . Транзакции IEEE по промышленной электронике . 65 (8): 6667–6675. дои : 10.1109/TIE.2017.2772205 . S2CID 4557504 .
- ^ «Недавние работы над сердечным насосом LifeFlow» . Линцский центр мехатроники GmbH.
- ^ Умно, Фрэнк. «Сердечный насос с магнитной левитацией имплантирован первому пациенту в США» . «Кардиология сегодня». Октябрь 2008 года.
- ^ Хоши, Х; Шинши, Т; Такатани, С (2006). «Кровавые насосы третьего поколения с механическими бесконтактными магнитными подшипниками». Искусственные органы . 30 (5): 324–338. дои : 10.1111/j.1525-1594.2006.00222.x . ПМИД 16683949 .
- ^ 10 марта 2004 г., «Магнитные подшипники Юлиха в кардиохирургии»
- ^ «Биологические системы — сердечный вспомогательный насос». Архивировано 8 октября 2016 г. в Wayback Machine . Лаборатория аэрокосмических исследований. Университет Вирджинии.
- ^ «Проектирование и анализ нового униполярного электродинамического подшипника с малыми потерями». Лембке, Торбьорн. Кандидатская диссертация. Стокгольм: Universitetsservice US AB, 2005. ISBN 91-7178-032-7
- ^ «3D-FEM-анализ униполярного индукционного подшипника с малыми потерями». Архивировано 8 июня 2011 г. в Wayback Machine Lembke, Торбьорн. 9-й Международный симпозиум по магнитным подшипникам (ISMB9). Август 2004 г.
- ^ Семинар в KTH – Королевском технологическом институте Стокгольма. 24 февраля 2010 г.
- ^ Амати Н., Тоноли А., Зенерино Э., Детони Дж. Г., Импинна Ф., «Методология проектирования электродинамических подшипников», XXXVIII Итальянская ассоциация анализа напряжений, Национальная конференция, № 109, 2009 г.
- ^ Филатов А.В., Маслен Э.Х. и Гиллис Г.Т., «Метод подвешивания вращающихся тел с использованием электромагнитных сил», Журнал прикладной физики, Vol. 91
- ^ Филатов А.В., Маслен Э.Х. и Гиллис Г.Т., «Стабильность электродинамической суспензии», Журнал прикладной физики, Vol. 92 (2002), стр. 3345-3353.
Дальнейшее чтение
[ редактировать ]- Швейцер, Г (2002). «Активные магнитные подшипники – возможности и ограничения» (PDF) . Учеб. 6-й интернат. Конференция IFToMM. О динамике ротора . Архивировано из оригинала (PDF) 5 февраля 2009 г.
- Чиба А., Фукао Т., Итикава О., Осима М., Такемото М., Доррел Д. (2005). Магнитные подшипники и безподшипниковые приводы . Ньюнес.
{{cite book}}: CS1 maint: несколько имен: список авторов ( ссылка ) - Швейцер Г., Маслен Х. (2009). Магнитные подшипники, теория, конструкция и применение во вращающихся машинах . Спрингер.
{{cite book}}: CS1 maint: несколько имен: список авторов ( ссылка ) - Джим Уилсон (сентябрь 1999 г.). «Победа над демоническим трением» . Популярная механика . Архивировано из оригинала 5 сентября 2008 г.
- Эстель Крут (1987–1995). Улучшенные магнитные подшипники . IPAustralia [Записи в базе данных Патентного ведомства Австралии].
- Т. Лембке (2005). Кандидатская диссертация «Проектирование и анализ нового униполярного электродинамического подшипника с малыми потерями» (PDF) . Стокгольм: Universitetsservice US AB. ISBN 91-7178-032-7 .
- Фремери, Йохан К. (2000). «Подшипники с постоянными магнитами» .
Внешние ссылки
[ редактировать ]- Цифровая библиотека кинематических моделей для проектирования (KMODDL) — фильмы и фотографии сотен работающих моделей механических систем в Корнельском университете. Также включает в себя электронную библиотеку классических текстов по машиностроению и проектированию.
- MADYN2000, программное обеспечение роторной динамики, поддерживает автоматизированное проектирование контроллеров магнитных подшипников и предоставляет многочисленные аналитические отчеты о качестве проектирования.
| Базы данных органов управления : Национальные |
|---|