Магнитный подшипник

Магнитный подшипник - это тип подшипника , который поддерживает нагрузку с использованием магнитной левитации . Магнитные подшипники поддерживают движущиеся части без физического контакта. Например, они способны использовать вращающийся вал и разрешать относительное движение с очень низким трениями и без механического износа . Магнитные подшипники поддерживают самые высокие скорости любого вида подшипника и не имеют максимальной относительной скорости.
Активные подшипники имеют несколько преимуществ: они не страдают от износа, испытывают низкое трение и часто могут приспосабливаться к неровным распределению в массовом распределении, позволяя роторам вращаться вокруг своего центра масс с очень низкой вибрацией.
Пассивные магнитные подшипники используют постоянные магниты и, следовательно, не требуют никакой входной мощности, но их трудно спроектировать из -за ограничений, описанных теоремой Эрншоу . Методы, использующие диамагнитные материалы, относительно неразвиты и сильно зависят от характеристик материала. В результате большинство магнитных подшипников являются активными магнитными подшипниками, использующими электромагниты , которые требуют непрерывного ввода мощности и активной системы управления для поддержания стабильной нагрузки. В комбинированной конструкции постоянные магниты часто используются для переноса статической нагрузки, и активный магнитный подшипник используется, когда левитированный объект отклоняется от его оптимального положения. Магнитные подшипники обычно требуют резервного подшипника в случае отказа системы мощности или системы управления.
Магнитные подшипники используются в нескольких промышленных применениях, таких как производство электроэнергии , уточнение нефти, эксплуатационная работа станка и обработка природного газа. Они также используются в центрифуге типа Zippe , [ 1 ] Для обогащения урана и турбомолекулярных насосов , где подшипники, смазываемые маслом, будут источником загрязнения.
Дизайн
[ редактировать ]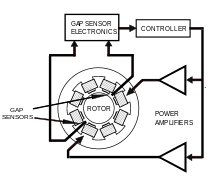
Активный магнитный подшипник работает на принципе электромагнитной подвески на основе индукции вихревых токов в вращающемся проводнике . Когда электропроводящий материал движется в магнитном поле , в материале будет генерироваться ток , который противостоит изменению магнитного поля (известного как закон Ленца ). Это генерирует ток, который приведет к магнитному полю, которое ориентировано на противоположность тому, который из магнита . Электрически проводящий материал, таким образом действует как магнитное зеркало . [ 2 ] [ 3 ] [ 4 ] [ 5 ] [ 6 ] [ 7 ] [ 8 ] [ 9 ] [ 10 ] [ 11 ] [ чрезмерные цитаты ]
Аппаратное обеспечение состоит из электромагнитной сборки, набора усилителей мощности, которые подают ток электромагнитам, контроллеру и датчикам зазора с ассоциированной электроникой, чтобы обеспечить обратную связь, необходимую для управления положением ротора в пределах зазора. Усилитель мощности обеспечивает равный ток смещения для двух пар электромагнитов на противоположных сторонах ротора. Это постоянное перетягивание каната опосредовано контроллером, который сметает ток смещения на равные и противоположные нарушения тока, когда ротор отклоняется от своего центра по центру.
Датчики разрыва обычно носят индуктивный характер и смысл в дифференциальном режиме. Усилители мощности в современном коммерческом приложении представляют собой твердотельные устройства, которые работают в конфигурации модуляции ширины импульса . Контроллер обычно является микропроцессором или цифровым сигналом .
Два типа нестабильности обычно присутствуют в магнитных подшипниках. Привлекательные магниты дают нестабильную статическую силу, которая уменьшается с увеличением расстояния и увеличивается при уменьшении расстояний. Это может привести к тому, что подшипник станет несбалансированным. Во -вторых, поскольку магнетизм является консервативной силой , он обеспечивает небольшое демпфирование; Колебания могут привести к потере успешной подвески, если присутствуют какие -либо движущие силы.
История
[ редактировать ]В таблице ниже перечислены несколько ранних патентов на активные магнитные подшипники. Ранние патенты на магнитные подвески можно найти, но здесь исключены, потому что они состоят из сборки постоянных магнитов проблемной стабильности на теорему Эрншоу .
| Изобретатель (ы) | Год | Патентный номер | Заголовок |
|---|---|---|---|
| Балки, Холмс | 1941 | 2,256,937 | Подвеска вращающихся тел |
| Балки | 1954 | 2,691,306 | Магнитно поддерживаемые вращающиеся тела |
| Гилберт | 1955 | 2,946,930 | Магнитная подвеска |
| Балки | 1962 | 3,041,482 | Аппарат для вращения свободно подвешенных тел |
| Балки | 1965 | 3,196,694 | Магнитная подвесная система |
| Волк | 1967 | 3,316,032 | Полифазный магнитный трансформатор подвески |
| Boden et al. | 1968 | DE1750602 | Магнитное хранение (немецкий патент) |
| Лиман | 1971 | 3,565,495 | Магнитный подвесный аппарат |
| Хаберманн | 1973 | 3,731,984 | Устройство магнитного подшипника для поддержки вертикального вала, адаптированного для вращения на высокой скорости |
| Habermann, Loyen, Joli, Aubert | 1974 | 3,787,100 | Устройства, включая вращающиеся элементы, поддерживаемые магнитными подшипниками |
| Хаберманн, Брюне | 1977 | 4,012,083 | Магнитные подшипники |
| Хаберманн, Брюне, Леклер | 1978 | 4,114,960 | Устройство детектора радиального смещения для магнитных подшипников |
| Крут, Эстель | 1990 | 1,988,024,350 | Дальнейшие улучшения магнитных подшипников |
| Микс, Кроуфорд р | 1992 | 5,111,102 | Магнитная подшипника |
| Крут, Эстель | 1994 | 1,991,075,982 | Нелинейный магнитный подшипник |
Jesse Beams из Университета Вирджинии подал одни из самых ранних активных магнитных патентов. [ 12 ] [ 13 ] Во время Второй мировой войны. Патенты касались ультрацентрифуги, предназначенных для обогащения изотопов элементов, необходимых для проекта Манхэттена . Тем не менее, магнитные подшипники не созрели до достижения в области твердотельной электроники и современной компьютерной технологии управления с работой Habermann [ 14 ] и Швейцер. [ 15 ] В 1987 году Эстель Крут дополнительно улучшила активную технологию магнитного подшипника, [ 16 ] Но эти конструкции не были изготовлены из -за дорогих затрат на производство, которые использовали лазерную систему руководства. Исследование Эстель Крут было предметом трех австралийских патентов [4] и финансировалась Начи Фудзикоши, Ниппон Сейко К.К. и Хитачи, и ее расчеты использовались в других технологиях, в которых использовались редко-земные магниты, но активные магнитные подшипники были разработаны только в Стадия прототипа. Крут [ 17 ] Дизайн также включал в себя предварительную компьютеризированную систему управления, в то время как последний дизайн был нелинейным магнитным подшипником.
Миорт [ 18 ] Обзор в истории активных магнитных подшипников в глубине. Она отмечает, что первое коммерческое применение активных магнитных подшипников было в турбоматине . Активный магнитный подшипник позволил исключить нефтяные резервуары на компрессорах для газопроводов Nova Gas Ltd. (NGTL) в Альберте, Канада. Это снизило опасность пожара, что позволило значительно сократить расходы на страхование. Успех этих установок с магнитным подшипником привел к тому, что NGTL привел к тому, что исследование и разработки системы управления цифровым магнитным подшипником в качестве замены для систем аналогового управления, поставляемых американской компанией Magnetic Bearings Inc. В 1992 году, исследовательская исследовательская группа NGTL по магнитному подшипнику. Revolve Technologies Inc. [5] для коммерциализации технологии цифрового магнитного подшипника. Компания была позже приобретена SKF Швеции. Французская компания S2M , основанная в 1976 году, была первой на коммерчески рыночных активных магнитных подшипников. Обширные исследования магнитных подшипников продолжаются в Университет Вирджинии в программе «Вращающийся механизм и контроль промышленных исследований» [6] .
В течение десятилетия, начиная с 1996 года, голландская компания нефти-газа NAM установила двадцать газовых компрессоров, каждая из которых была обусловлена 23-мегаваттным электродвигателем с переменной скоростью. Каждый блок был полностью оборудован активными магнитными подшипниками как на двигателе, так и на компрессоре. Эти компрессоры используются в газовом поле Гронингена для извлечения оставшегося газа из этого большого газового поля и для увеличения пропускной способности. Дизайн моторики был выполнен Siemens, а активные магнитные подшипники были доставлены подшипниками Waukesha (принадлежащим Dover Corporation ). (Первоначально эти подшипники были разработаны Glacier, эта компания позже была захвачена федеральным магнатом и в настоящее время является частью подшипников Waukesha.) Используя активные магнитные подшипники и прямой привод между двигателем и компрессором (без коробки передач между ними) и Нанесение уплотнений сухого газа была достигнута полностью сухой (без масляной) системы. Применение активных магнитных подшипников как в драйвере, так и в компрессоре (по сравнению с традиционной конфигурацией с использованием шестерни и шариковых подшипников) приводит к относительно простой системе с очень широким рабочим диапазоном и высокой эффективностью, особенно при частичной нагрузке. Как это было сделано в поле Гронингена, полная установка может быть дополнительно размещена на открытом воздухе без необходимости большого здания компрессора.
Неконтролирующие подшипники с постоянным магнитом со стабилизацией электроэнергии были применены для патента RG Gilbert в 1955 году (патент США 2946 930) [ 19 ] и К. Боден, Д. Шеффер в 1968 году (немецкий патент 1750602). [ 20 ] Эти изобретения обеспечивают технологическую основу для ряда практических применений, некоторые из которых достигли стадии производства промышленных серий по лицензии от Forschungszentrum Jülich с 1980 года. [ 21 ] [ 22 ]
Микс [ 23 ] Первоначальные гибридные магнитные подшипники (патент США 5 1111112), в которых постоянные магниты обеспечивают поле смещения, а катушки активного управления используются для стабильности и динамического управления. Эти конструкции с использованием постоянных магнитов для полей смещения меньше и имеют более легкий вес, чем чисто электромагнитные подшипники. Электронная система управления также меньше и требует меньшей электрической мощности, поскольку поле смещения обеспечивается постоянными магнитами.
Поскольку развитие необходимых компонентов прогрессировало, научный интерес к этой области также увеличился, пик на первом международном симпозиуме по магнитным подшипникам, состоявшимся в 1988 году в Цюрихе, с основанием Международного общества магнитных подшипников профессором Швейцером ( ETHZ ), профессор Аллайр (Университет Вирджинии) и профессор Окада (Университет Ибараки). С тех пор симпозиум превратился в серию биеннальной конференции с постоянным порталом по технологии магнитного подшипника [7], где все вклады симпозиума предоставляются. Веб -портал поддерживается международным исследовательским и промышленным сообществом. В 2012 году в 2012 году в 2012 году в 2012 году в 2012 году в 2012 году присоединились к награду за всю жизнь, профессор Герхард Швейцер, и Майкл Сванн из магнитных подшипников Ваукеша [8] .
Приложения
[ редактировать ]Преимущества магнитного подшипника включают очень низкое и предсказуемое трение, а также способность бежать без смазки и в вакууме. Магнитные подшипники все чаще используются в промышленных машинах, таких как компрессоры, турбины, насосы, двигатели и генераторы.
Магнитные подшипники обычно используются в ватт-часах электрическими коммунальными услугами для измерения энергопотребления дома. Они также используются в приложениях для хранения энергии или транспортировки и для поддержки оборудования в вакууме, например, в системах хранения энергии маховика . [ 24 ] [ 25 ] Маховик в вакууме имеет очень низкие потери сопротивления ветра, но обычные подшипники обычно быстро терпят неудачу в вакууме из -за плохой смазки. Магнитные подшипники также используются для поддержки поездов Maglev , чтобы получить низкий шум и плавную езду, устраняя физические контактные поверхности. Недостатки включают высокую стоимость, тяжелый вес и относительно большой размер.
Магнитные подшипники также используются в некоторых центробежных компрессорах для чиллеров с валом, состоящим из магнитного материала между магнитными подшипниками. Небольшое количество тока обеспечивает магнитную левитацию для вала, который остается свободно подвешенным в воздухе, обеспечивая нулевое трение между подшипником и валом.
Среди наиболее значимых промышленных применений являются турбомолекулярные насосы для генерации вакуума на полупроводниковых производственных заводах. Первый коммерческий магнитный тип подшипников без механической стабилизации продавался Leybold AG в 1975 году (электромагнитный) и в 1989 году (постоянный магнит).
В области вакуумной метрологии в 1946 году в 1946 году в 1946 году в 1980 году был установлен как справочный стандарт в качестве эталонного стандарта. Юлих. SRG является важным для управления вакуумным процессом в оборудовании для производства полупроводников.
Новое применение магнитных подшипников находится в искусственных сердцах. Использование магнитной подвески в устройствах помощи в желудочке было впервые представлено профессором Полом Аллером и профессором Хьюстоном Вудом в Университете Вирджинии, кульминацией которого стало первое магнитно приостановленное центробежное насос ( VAD ). [ Цитация необходима ]
Несколько устройств для оказания желудочков используют магнитные подшипники, в том числе насос сердца жизни жизни, [ 26 ] Система помощи левым желудочкам DuraHeart, [ 27 ] Левитроникс Центримаг, [ 28 ] и берлинское сердце . [ 29 ] В этих устройствах единственная движущаяся часть подвежавается комбинацией гидродинамической силы и магнитной силы. Устранение физических контактных поверхностей, магнитные подшипники облегчают уменьшение участков с высоким напряжением сдвига (что приводит к повреждению эритроцитов) и стагнации потока (что приводит к свертыванию) в этих насосах крови. [ 30 ] Berlin Heart Incor был первым коммерческим устройством помощи в сфере желудочков без механической или жидкой динамической стабилизации.
Calnetix Technologies , синхронные магнитные подшипники (дочерняя компания Johnson Controls International), магнитные подшипники Waukesha и S2M (дочерняя компания SKF) являются одними из основных разработчиков и производителей магнитных подшипников и производителей.
Будущие достижения
[ редактировать ]
При использовании системы левитации на основе индукции, присутствующей в технологиях Maglev , таких как система индуктивной обработки , магнитные подшипники могут заменить сложные системы управления с помощью массивов Halbach и простых катушек с закрытыми петлями. Эти системы получают простоту, но менее выгодны в отношении потерь вихревого тока . Для вращающихся систем можно использовать гомополярные конструкции магнитов вместо мультипольных конструкций Halbach, которые значительно снижают потери.
Примером, который обошел проблемы с теоремой Эрншоу, является гомополярная электродинамическая подшипника, изобретенная доктором Торбьорном Лембке. [ 31 ] [ 32 ] [ 33 ] Это новый тип электромагнитного подшипника, основанный на пассивной магнитной технологии. Это не требует какой -либо управляющей электроники для работы и работает, потому что электрические токи, генерируемые движением, вызывают восстановление силы. [ 34 ] [ 35 ] [ 36 ]
Смотрите также
[ редактировать ]Ссылки
[ редактировать ]- ^ Чарльз Д., Спинку ядерного возвращения , наука, вып. 315, (30 марта 2007 г.)
- ^ Basore PA, «Пассивная стабилизация магнитных подшипников маховика», Мастерская диссертация, Массачусетский технологический институт (США), 1980.
- ^ Мураками С. и Сато И., «Эксперименты очень простого радиального магнитного подшипника на основе вихревых токов», в материалах 7-го международного симпозиума по магнитным подшипникам, март 2000 года.
- ^ Bender D. и Post RF, «Пассивные магнитные подшипники температуры окружающей среды для систем хранения энергии маховика», в материалах 7 -го международного симпозиума по магнитным подшипникам, март 2000 года.
- ^ Moser R., Regamey YJ, Sandtner J. и Bleuler H., «Пассивная диамагнитная левитация для махолов», в материалах 8 -го международного симпозиума по магнитным подшипникам, 2002.
- ^ Филатов А.В., Макмаллен П., Дэйви К. и Томпсон Р., «Система хранения энергии маховика с гомополярным электродинамическим магнитным подшипником», в материалах 10 -го международного симпозиума на магнитных подшипниках, 2006.
- ^ Sandtner J. и Bleuler H., «Электродинамические пассивные магнитные подшипники с плоскими массивами Halbach», в материалах 9 -го международного симпозиума по магнитным подшипникам, август 2004 года.
- ^ Sandtner J. и Bleuler H., «Пассивный электродинамический магнитный тяга, специально предназначенные для постоянных скоростных применений», в материалах 10 -го международного симпозиума по магнитным подшипникам, август 2004 года.
- ^ Amati N., de Lépine X. и Tonoli A., «Моделирование электродинамических подшипников», ASME Journal of Vibration and Acoustics, 130, 2008.
- ^ Kluyskens V., Dehez B., «Динамическая электромеханическая модель для пассивных магнитных подшипников», IEEE Transactions на Magnetics, 43, стр. 3287-3292, 2007.
- ^ Kluyskens V., Dehez B., «Параметризованная электромеханическая модель для магнитных подшипников с индуцированными токами», Journal of System Design and Dynamics - Специальный выпуск на одиннадцатом международном симпозиуме на магнитных подшипниках, 2009. [1] [ Постоянная мертвая ссылка ]
- ^ Beams, J., Производство и использование высоких центробежных полей , Science, Vol. 120, (1954)
- ^ Beams, J., Магнитные подшипники , Paper 810a, Coturitive Engineering Conference, Детройт, Мичиган, США, SAE (январь 1964 г.)
- ^ Habermann, H., Liard, G. Практические магнитные подшипники , IEEE Spectrum, Vol. 16, № 9, (сентябрь 1979 г.)
- ^ Schweitzer, G., Характеристики магнитного подшипника ротора для активного управления вибрацией , бумага C239/76, Первая международная конференция по вибрациям в вращающейся машине, (1976)
- ^ Эстель Крут, Австралийские изобретатели Weekly , Ассоциация изобретателей штата Новый Южный Уэльс, Vol. 3, (апрель 1987 г.)
- ^ Саусан Ахмед Эльхури Ахмед, Нуха Абдалла Мухаммед Бабкер & Mohamed Toum Fadel, «Исследование классов магнетизма», Ijiset - Международный журнал инновационных наук, инженерия и технологии, Vol. 6 Выпуск 4, 2348 - 7968, (2019).
- ^ Касарда М. Обзор технологии и применения активного магнитного подшипника , The Shock and Vibration Digest, Vol.32, № 2: публикация Информационного центра шока и вибрации, Военно -исследовательская лаборатория (март 2000 г.)
- ^ Rg Гилберт, «Магнитная подвеска» [2] 1955
- ^ К. Боден, Д. Шеффер, «Магнитное хранилище» [3] 1968
- ^ Йохан К. Женщина, «Постоянный магнитный лагерь» , ноябрь 2000 г. (на немецком языке)
- ^ Йохан К. Фремри, «Постоянные магнитные подшипники» , март 2019 г.
- ^ Meeks, Cr, «Магнитные подшипники - оптимальный дизайн и применение», бумага Представлено на Международном семинаре по постоянным магнитам редкоземельного кобальта, Университет Дейтона, Дейтон, штат Огайо, 14–17 октября 1974 г.
- ^ Йохан К. Фремри и Майкл Колк (1999) «Маховик с силой 500-WH на постоянных подшипниках магнитов»
- ^ Ли, Сяоджун; Анвари, Бахар; Палаццоло, Алан; Ван, Чжиян; Толият, Хамид (2018-08-14). «Система хранения энергии маховика для маховика с утилитом с хюблим, высокопрочным стальным ротором без вала» . IEEE транзакции по промышленной электронике . 65 (8): 6667–6675. doi : 10.1109/tie.2017.2772205 . S2CID 4557504 .
- ^ «Недавняя работа над насосом сердца жизни» . Линц Центр Мехатроники GmbH.
- ^ Умный, Фрэнк. «Магнитная левитация сердца насоса, имплантированный у первого пациента США» . «Кардиология сегодня». Октябрь 2008.
- ^ Хоши, ч; Шинши, т; Takatani, S (2006). «Кровавые насосы третьего поколения с механическими безконтактными магнитными подшипниками». Искусственные органы . 30 (5): 324–338. doi : 10.1111/j.1525-1594.2006.00222.x . PMID 16683949 .
- ^ 10 марта 2004 г., «Магнитные подшипники Юлиха в сердечной хирургии»
- ^ «Биологические системы-насос сердца», архив 2016-10-08 на машине Wayback . Аэрокосмическая исследовательская лаборатория. Университет Вирджинии.
- ^ «Проектирование и анализ нового гомополярного электродинамического подшипника с низкой потерей». Лембке, Торбьерн. Докторская диссертация. Стокгольм: UniversitetsService US AB, 2005. ISBN 91-7178-032-7
- ^ "3D-FEM Анализ низкого потери гомополярного индукционного подшипника" Архивировал 2011-06-08 на машине Wayback Lembke, Torbjörn. 9 -й международный симпозиум по магнитным подшипникам (ISMB9). Август 2004 г.
- ^ Семинар в KTH - Королевский технологический институт Стокгольм. 24 февраля 2010 г.
- ^ Amati, N., Tonoli, A., Zenerino, E., Detoni, JG, Impinna, F., «Методология проектирования электродинамического подшипника», XXXVIII Итальянская ассоциация анализа подошвы, Национальная конференция, № 109, 109 , 2009
- ^ Филатов, AV, Maslen, EH и Gillies, GT, «метод суспензии вращающихся тел с использованием электромагнитных сил», Journal of Applied Physics, Vol. 91
- ^ Филатов, AV, Maslen, EH и Gillies, GT, «Стабильность электродинамической суспензии» Журнал Applied Physics, Vol. 92 (2002), с. 3345-3353.
Дальнейшее чтение
[ редактировать ]- Schweitzer, G (2002). «Активные магнитные подшипники - шансы и ограничения» (PDF) . Прокурор 6 -й интернат. Iftomm conf. На динамике ротора . Архивировано из оригинала (PDF) на 2009-02-05.
- Chiba, A., Fukao, T., Ichikawa, O., Oshima, M., Takemoto, M., Dorrel, D. (2005). Магнитные подшипники и не подходящие диски . Новый.
{{cite book}}: Cs1 maint: несколько имен: список авторов ( ссылка ) - Schweitzer, G., Maslen, H. (2009). Магнитные подшипники, теория, дизайн и применение к вращающемуся механизмам . Спрингер.
{{cite book}}: Cs1 maint: несколько имен: список авторов ( ссылка ) - Джим Уилсон (сентябрь 1999 г.). «Избиение трения демонов» . Популярная механика . Архивировано с оригинала на 2008-09-05.
- Эстель Крут (1987–1995). Улучшенные магнитные подшипники . Ipaustralia [Австралийские записи патентных кабинетов].
- Т. Лембке (2005). Кандидатская диссертация «Проектирование и анализ нового низкого гомополярного электродинамического подшипника» (PDF) . Стокгольм: UniversitetsService US AB. ISBN 91-7178-032-7 .
- Фремри, Йохан К. (2000). «Постоянные подшипники магнитов» .
Внешние ссылки
[ редактировать ]- Кинематические модели для дизайна цифровой библиотеки (KMODDL) - фильмы и фотографии сотен рабочих моделей механических систем в Корнелльском университете. Также включает в себя библиотеку электронных книг классических текстов по механическому дизайну и технике.
- Madyn2000, Rotordynamics Software поддерживает компьютерную конструкцию контроллеров магнитного подшипника и предоставляет несколько аналитических отчетов о качестве дизайна.
| Базы данных управления авторитетом : национальный |
|---|