Синхронный двигатель


Синхронный электродвигатель – это электродвигатель переменного тока , у которого в установившемся режиме [1] вращение вала синхронизировано с частотой питающего тока ; период вращения в точности равен целому числу циклов переменного тока . используются электромагниты В синхронных двигателях в качестве статора двигателя , которые создают магнитное поле, которое вращается во времени с колебаниями тока. Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с одинаковой скоростью и в результате создает второе синхронизированное вращающееся магнитное поле. Синхронный двигатель называется двигателем с двойным питанием , если он снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре. [2]
Синхронные и асинхронные двигатели являются наиболее широко используемыми двигателями переменного тока. Синхронные двигатели вращаются со скоростью, привязанной к частоте сети, поскольку они не используют индукцию для создания магнитного поля ротора. Асинхронным двигателям требуется скольжение : ротор должен вращаться с частотой немного меньшей, чем частота переменного тока, чтобы индуцировать ток в роторе.
Небольшие синхронные двигатели используются в приложениях для измерения времени, таких как синхронные часы , таймеры в приборах, магнитофоны и прецизионные сервомеханизмы , в которых двигатель должен работать с точной скоростью; точность зависит от частоты линии электропередачи , которая тщательно контролируется в крупных взаимосвязанных сетевых системах.
Синхронные двигатели доступны в самовозбуждающихся, дробных двигателях. [3] до промышленных размеров. [1] В диапазоне дробных лошадиных сил большинство синхронных двигателей используются для обеспечения точной постоянной скорости. Эти машины обычно используются в аналоговых электрических часах, таймерах и подобных устройствах.
В типичных промышленных размерах синхронный двигатель обеспечивает эффективное преобразование энергии переменного тока в работу ( электрический КПД выше 95% является нормальным для больших размеров). [4] и он может работать с опережающим коэффициентом мощности или с единичным коэффициентом мощности и тем самым обеспечивать коррекцию коэффициента мощности. [ нужна ссылка ]
Типы
[ редактировать ]Синхронные двигатели относятся к категории синхронных машин , в которую также входят синхронные генераторы. Действие генератора происходит, если полюса поля «движутся впереди результирующего потока в воздушном зазоре за счет поступательного движения первичного двигателя ». Действие двигателя происходит, если полюса поля «тянутся за результирующим потоком воздушного зазора тормозящим моментом на валу нагрузки ». [1]
Два основных типа синхронных двигателей различаются по способу намагничивания ротора: с возбуждением без возбуждения и с возбуждением постоянным током. [5]
Невозбужденный
[ редактировать ]
В двигателях без возбуждения ротор изготовлен из стали. Он вращается синхронно с вращающимся магнитным полем статора, поэтому через него проходит почти постоянное магнитное поле. Внешнее поле статора намагничивает ротор, создавая магнитные полюса, необходимые для его вращения. Ротор изготовлен из стали с высокой удерживающей способностью , например, кобальтовой стали. Они производятся в с постоянными магнитами , сопротивлением и гистерезисом : конструкциях [6]
Постоянный магнит
[ редактировать ]Синхронный двигатель с постоянными магнитами (PMSM) использует постоянные магниты , встроенные в ротор, для создания постоянного магнитного поля. Статор несет обмотки, подключенные к источнику переменного тока для создания вращающегося магнитного поля (как в асинхронном двигателе ). При синхронной скорости полюса ротора фиксируются во вращающемся магнитном поле. СДПМ аналогичны бесщеточным двигателям постоянного тока . Неодимовые магниты являются наиболее распространенными, хотя быстрые колебания цен на неодимовые магниты спровоцировали исследования ферритовых магнитов . [7] Из-за присущих ферритовым магнитам характеристик магнитная цепь этих машин должна быть способна концентрировать магнитный поток, что обычно приводит к использованию роторов спицевого типа. [8] Машины, в которых используются ферритовые магниты, имеют меньшую плотность мощности и плотность крутящего момента по сравнению с неодимовыми машинами. [8]
PMSM используются в качестве безредукторных двигателей лифтов с 2000 года. [9]
Большинству СДСМ требуется привод с регулируемой частотой . для запуска [10] [11] [12] [13] [14] Однако некоторые из них включают в ротор для запуска беличью клетку — такие системы известны как линейный или самозапуск. [15] Они обычно используются в качестве более эффективной замены асинхронных двигателей (из-за отсутствия скольжения), но должны обеспечивать достижение синхронной скорости и способность системы выдерживать пульсации крутящего момента во время запуска.
PMSM обычно управляются с помощью прямого управления крутящим моментом. [16] и полеориентированное управление . [17]
Нежелание
[ редактировать ]Реактивные двигатели имеют литой стальной ротор с выступающими (выступающими) зубчатыми полюсами. Обычно ротора меньше, чем полюсов статора, чтобы минимизировать пульсации крутящего момента и предотвратить одновременное выравнивание всех полюсов - положение, при котором не может создаваться крутящий момент. [3] [18] Размер воздушного зазора в магнитной цепи и, следовательно, сопротивление минимальны, когда полюса совпадают с (вращающимся) магнитным полем статора, и увеличиваются с увеличением угла между ними. Это создает крутящий момент, который выравнивает ротор с ближайшим полюсом поля статора. Таким образом, на синхронной скорости ротор «привязывается» к вращающемуся полю статора. Это не может запустить двигатель, поэтому в полюса ротора обычно встроены обмотки с короткозамкнутым ротором , чтобы обеспечить крутящий момент ниже синхронной скорости. Таким образом, машина запускается как асинхронный двигатель до тех пор, пока не достигнет синхронной скорости, когда ротор «втягивается» и фиксируется в поле статора. [19]
Конструкции реактивных двигателей имеют номинальную мощность от долей лошадиных сил (несколько ватт) до примерно 22 кВт . Небольшие реактивные двигатели имеют низкий крутящий момент и обычно используются в приборостроении. В многомощных двигателях с умеренным крутящим моментом используется конструкция с короткозамкнутым ротором и зубчатыми роторами. При использовании источника питания с регулируемой частотой все двигатели в системе привода могут работать с одинаковой скоростью. Частота источника питания определяет рабочую скорость двигателя.
Гистерезис
[ редактировать ]Гистерезисные двигатели имеют прочный, гладкий цилиндрический ротор, отлитый из с высокой коэрцитивной силой . магнитотвердой кобальтовой стали [18] Этот материал имеет широкую петлю гистерезиса (высокую коэрцитивную силу ), что означает, что после намагничивания в заданном направлении для изменения намагниченности требуется сильное магнитное поле. Вращающееся поле статора заставляет каждый небольшой объем ротора испытывать реверсивное магнитное поле. Из-за гистерезиса фаза намагничивания отстает от фазы приложенного поля. Таким образом, ось магнитного поля, индуцированного в роторе, отстает от оси поля статора на постоянный угол δ, создавая крутящий момент, когда ротор пытается «догнать» поле статора. Пока скорость ротора ниже синхронной, каждая частица ротора испытывает реверсивное магнитное поле с частотой «скольжения», которое заставляет ее вращаться вокруг петли гистерезиса, вызывая запаздывание поля ротора и создание крутящего момента. Ротор имеет двухполюсную стержневую конструкцию с низким сопротивлением. [18] Когда ротор приближается к синхронной скорости и скольжение достигает нуля, оно намагничивается и выравнивается с полем статора, в результате чего ротор «привязывается» к вращающемуся полю статора.
Основным преимуществом гистерезисного двигателя является то, что, поскольку угол задержки δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Таким образом, он является самозапускающимся и не нуждается в индукционной обмотке для запуска, хотя во многих конструкциях в ротор встроена проводящая структура обмотки с короткозамкнутым ротором для обеспечения дополнительного крутящего момента при запуске. [ нужна ссылка ]
Гистерезисные двигатели производятся с субдробной мощностью, в первую очередь как серводвигатели и двигатели синхронизации. Гистерезисные двигатели, более дорогие, чем реактивные, используются там, где требуется точная постоянная скорость. [ нужна ссылка ]
Двигатели с внешним возбуждением
[ редактировать ]
Эти двигатели, обычно изготовленные в больших размерах (более 1 лошадиной силы или 1 киловатта), требуют постоянного тока (DC) для возбуждения (намагничивания) ротора. Проще всего это осуществить через контактные кольца .
выпрямитель . Также можно использовать бесщеточную индукционную систему переменного тока и [20]
Питание может подаваться от отдельного источника или от генератора, непосредственно подключенного к валу двигателя.
Методы контроля
[ редактировать ]Синхронный двигатель с постоянными магнитами и реактивный двигатель требуют для работы системы управления ( ЧРП или сервопривод ).
Существует большое количество способов управления синхронными машинами, подбираемых в зависимости от конструкции электродвигателя и области применения.
Методы контроля можно разделить на: [21] [22]
PMSM также могут работать по принципу управления с разомкнутым контуром. [23] который иногда используется для запуска, что позволяет выполнять операцию определения положения. [24]
Синхронная скорость
[ редактировать ] синхронного Синхронная скорость двигателя равна: [25]
в об/мин , по:

и в рад·с −1 , к:

где:
- — частота питающего переменного тока в Гц ,
- количество магнитных полюсов ,
- — количество пар полюсов (реже плоскостей коммутации ), .




Примеры
[ редактировать ]Однофазный 4-полюсный (2 - полюсная пара) синхронный двигатель работает при частоте сети переменного тока 50 Гц. Число пар полюсов равно 2, поэтому синхронная скорость:

Трехфазный 12-полюсный (6-полюсная пара) синхронный двигатель работает при частоте сети переменного тока 60 Гц. Число пар полюсов равно 6, поэтому синхронная скорость равна:

Число магнитных полюсов, , равно количеству групп катушек на фазу. Чтобы определить количество групп катушек на фазу в трехфазном двигателе, подсчитайте количество катушек и разделите их на количество фаз, которое равно 3. Катушки могут охватывать несколько пазов в сердечнике статора, что делает их утомительным подсчетом. . Если в трехфазном двигателе насчитать в общей сложности 12 групп катушек, он будет иметь 4 магнитных полюса. Для 12-полюсной трехфазной машины будет 36 катушек. Число магнитных полюсов ротора равно количеству магнитных полюсов статора.
Строительство
[ редактировать ]

Основными компонентами электродвигателей являются статор и ротор. [26] Статоры синхронного двигателя и асинхронного двигателя имеют схожую конструкцию. [27] Конструкция синхронного двигателя аналогична конструкции синхронного генератора переменного тока . [28] Корпус статора содержит оберточную пластину (кроме синхронных электрических машин двойного питания с фазным ротором ). К оберточной пластине прикреплены кольцевые ребра и шпонки. Для того чтобы выдержать вес машины, необходимы крепления рамы и опоры. [29] Обмотка синхронного статора состоит из трехфазной обмотки. Он снабжен трехфазным питанием, а ротор снабжен источником постоянного тока.
Двигателям постоянного тока с возбуждением требуются щетки и контактные кольца для подключения к источнику возбуждения. [30] Обмотку возбуждения можно возбуждать бесщеточным возбудителем. [31] Цилиндрические круглые роторы (также известные как ротор с неявнополюсными полюсами) используются с числом полюсов до шести.
В некоторых машинах или когда необходимо большое количество полюсов, используется явнополюсный ротор. [32] [33]
В большинстве конструкций синхронных двигателей используется неподвижный якорь и вращающаяся обмотка возбуждения. Этот тип конструкции имеет преимущество перед двигателем постоянного тока , в котором используется вращающийся якорь.
Операция
[ редактировать ]Электродвигатели генерируют мощность за счет взаимодействия магнитных полей статора и ротора. В синхронных двигателях статор пропускает трехфазные токи и создает трехфазный вращающийся магнитный поток (и, следовательно, вращающееся магнитное поле). Ротор в конечном итоге фиксируется во вращающемся магнитном поле и вращается вместе с ним. Когда поле ротора соединяется с вращающимся магнитным полем, говорят, что двигатель синхронизирован. Возможен однофазный статор (или двухфазный, производный от однофазного), но в этом случае направление вращения не определено, и машина может запускаться в любом направлении, если это не запрещено пусковыми механизмами. [34]
Обмоточный амортизатор
[ редактировать ]Когда двигатель работает, скорость двигателя зависит только от частоты питания. Когда нагрузка двигателя превышает пороговую, двигатель теряет синхронизацию, и ротор больше не следует за вращающимся магнитным полем.
Поскольку двигатель не может создавать крутящий момент, если он теряет синхронизацию, практические синхронные двигатели имеют частичный или полный демпфер с короткозамкнутым ротором, называемый амортизирующей обмоткой, для стабилизации работы и облегчения запуска.
Поскольку эта обмотка меньше, чем у эквивалентного асинхронного двигателя, и может перегреваться при длительной работе, а также поскольку в обмотке возбуждения ротора индуцируются большие напряжения скольжения, устройства защиты синхронного двигателя распознают это состояние и прерывают подачу питания (несинхронизирование). защита). [34]
Методы запуска
[ редактировать ]Синхронные двигатели выше определенного размера не могут запуститься самостоятельно. Это свойство обусловлено инерцией ротора; он не может мгновенно следовать за вращением магнитного поля статора. Поскольку синхронный двигатель не создает среднего крутящего момента в состоянии покоя, он не может разогнаться до синхронной скорости без дополнительного механизма. [3]
Большие двигатели, работающие от коммерческой мощности, имеют индукционную обмотку с короткозамкнутым ротором, которая обеспечивает достаточный крутящий момент для ускорения, а также служит для гашения колебаний скорости двигателя. [3] Как только скорость ротора приближается к синхронной, обмотка возбуждения возбуждается и двигатель синхронизируется. Очень большие системы двигателей могут включать в себя «пони» двигатель, который ускоряет ненагруженную синхронную машину до приложения нагрузки. [35] [36] Двигатели с электронным управлением можно разогнать с нулевой скорости путем изменения частоты тока статора. [37]
Небольшие синхронные двигатели обычно используются в электромеханических часах или таймерах с питанием от сети, которые используют частоту сети для запуска зубчатого механизма на правильной скорости. Такие небольшие синхронные двигатели способны запускаться без посторонней помощи, если момент инерции ротора и его механическая нагрузка достаточно малы. Двигатель ускоряется от скорости скольжения до синхронной скорости во время полупериода ускорения реактивного момента. [3] Однофазные синхронные двигатели, например, в электрических настенных часах, могут свободно вращаться в любом направлении, в отличие от двигателей с экранированным полюсом .
Затраты являются важным параметром для начинающих. [38] Возбуждение ротора является возможным способом решения проблемы. [39] Кроме того, методы запуска больших синхронных машин включают повторяющуюся инверсию полярности полюсов ротора во время запуска. [40]
Применение, особые свойства и преимущества
[ редактировать ]Использование в качестве синхронного конденсатора
[ редактировать ]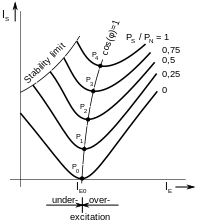
Изменяя возбуждение синхронного двигателя, можно заставить его работать с запаздывающим, опережающим и единичным коэффициентом мощности . Возбуждение, при котором коэффициент мощности равен единице, называется нормальным напряжением возбуждения . [41] Величина тока при таком возбуждении минимальна. [41] Напряжение возбуждения, превышающее нормальное возбуждение, называется повышенным напряжением возбуждения, напряжение возбуждения, меньшее нормального возбуждения, называется недостаточным возбуждением. [41] Когда двигатель чрезмерно возбужден, противо-ЭДС будет больше, чем напряжение на клеммах двигателя. Это вызывает эффект размагничивания из-за реакции якоря. [42]
Кривая V синхронной машины показывает ток якоря как функцию тока возбуждения. С увеличением тока возбуждения ток якоря сначала уменьшается, затем достигает минимума, затем возрастает. Точка минимума также является точкой, в которой коэффициент мощности равен единице. [43]
Эту возможность выборочного управления коэффициентом мощности можно использовать для коррекции коэффициента мощности энергосистемы, к которой подключен двигатель. Поскольку большинство энергосистем любого значительного размера имеют чистый коэффициент мощности с запаздыванием, наличие перевозбужденных синхронных двигателей приближает полезный коэффициент мощности системы к единице, повышая эффективность. Такая коррекция коэффициента мощности обычно является побочным эффектом того, что двигатели уже присутствуют в системе и выполняют механическую работу, хотя двигатели могут работать без механической нагрузки просто для обеспечения коррекции коэффициента мощности. На крупных промышленных предприятиях, таких как фабрики, взаимодействие между синхронными двигателями и другими запаздывающими нагрузками может быть явным образом учтено при проектировании электрооборудования предприятия. [ нужна ссылка ]
Стационарный предел устойчивости
[ редактировать ]
где,
- это крутящий момент
- это угол крутящего момента
- это максимальный крутящий момент



здесь,

При приложении нагрузки угол крутящего момента увеличивается. Когда = 90° крутящий момент будет максимальным. Если нагрузка будет приложена дальше, двигатель потеряет синхронизм, поскольку крутящий момент двигателя будет меньше момента нагрузки. [44] [45] Максимальный момент нагрузки, который может быть приложен к двигателю без потери его синхронизма, называется пределом установившейся устойчивости синхронного двигателя. [44]
Другой
[ редактировать ]Синхронные двигатели особенно полезны в приложениях, требующих точного контроля скорости или положения:
- Скорость не зависит от нагрузки в рабочем диапазоне двигателя.
- Скорость и положение можно точно контролировать с помощью элементов управления с разомкнутым контуром (например, шаговых двигателей ).
- К приложениям с низким энергопотреблением относятся машины позиционирования, где требуется высокая точность, и роботов . приводы
- Они будут сохранять свое положение, когда постоянный ток подается как на обмотки статора, так и на обмотки ротора.
- Часы, приводимые в действие синхронным двигателем, в принципе имеют такую же точность, как и частота сети их источника питания. (Хотя небольшие отклонения частоты будут происходить в течение любых нескольких часов, операторы сети активно корректируют частоту линии в более поздние периоды, чтобы компенсировать это, тем самым сохраняя точность часов с приводом от двигателя; см. Частота сети § Стабильность .)
- Вертушки проигрывателя пластинок
- Повышенная эффективность в низкоскоростных устройствах (например, шаровых мельницах ).
Подтипы
[ редактировать ]- Двигатель переменного тока § Многофазный синхронный двигатель
- Шаговый двигатель (может быть синхронным или нет)
- Синхронная бесщеточная электрическая машина с фазным ротором двойного питания.
См. также
[ редактировать ]- Часы привода
- Электрическая машина с двойной подачей
- Коэффициент короткого замыкания (синхронный генератор)
Ссылки
[ редактировать ]- ^ Jump up to: а б с Фицджеральд, А.Е.; Чарльз Кингсли младший; Александр Куско (1972). «Глава 6, Синхронные машины, установившийся режим». Электромашиностроение, 3-е изд . США: МакГроу-Хилл. стр. 283–330. Каталог Библиотеки Конгресса № 70-137126.
- ^ «Синхронный двигатель с постоянными магнитами» .
- ^ Jump up to: а б с д и Фицджеральд, А.Е.; Чарльз Кингсли младший; Александр Куско (1971). «Глава 11, раздел 11.2 Пусковые и рабочие характеристики однофазных асинхронных и синхронных двигателей, самозапускающихся реактивных двигателей». Электромашиностроение, 3-е изд . США: МакГроу-Хилл. стр. 536–538. Каталог Библиотеки Конгресса № 70-137126.
- ^ Иордания 2013 , с. 106.
- ^ Джеймс Дж. Столлкап, Генератор, трансформатор, двигатель и компрессор Столлкапа , стр. 15–13, Jones & Bartlett, 2012 г. ISBN 1-4496-9519-1 .
- ^ Уильям Йидон (редактор), Справочник по малым электродвигателям , McGraw-Hill, 2001 г. ISBN 0-07-072332-X , глава 12 «Синхронные машины».
- ^ Эрикссон, С; Эклунд, П. (26 ноября 2020 г.). «Влияние магнитных свойств на работу электрических машин с ферритовыми магнитами» . Журнал физики D: Прикладная физика . 54 (5): 054001. doi : 10.1088/1361-6463/abbfc5 . ISSN 0022-3727 . S2CID 225152358 .
- ^ Jump up to: а б Люк, Патрик Чи-Квонг; Абдулрахем, Хайдер А.; Ся, Бин (ноябрь 2020 г.). «Недорогие высокопроизводительные ферритовые машины с постоянными магнитами для электромобилей: комплексный обзор» . Электронный транспорт . 6 : 100080. doi : 10.1016/j.etran.2020.100080 . ISSN 2590-1168 . S2CID 224968436 .
- ^ Мехри, Дариус (18 сентября 2000 г.). «Эффективность подъема ремней» . DesignNews.com . Архивировано из оригинала 29 июня 2013 года . Проверено 10 мая 2016 г.
- ^ Р. Ислам; И. Хусейн; А. Фардун; К. Маклафлин. «Конструкции магнитов синхронных двигателей с постоянными магнитами и перекосом для уменьшения пульсаций крутящего момента и уменьшения крутящего момента» . Промышленные приложения, транзакции IEEE. 2009. два : 10.1109/TIA.2008.2009653
- ^ Ки-Чан Ким; Сын-Бин Лим; Дэ Хён Ку; Джу Ли. Расчет формы постоянного магнита для синхронного двигателя с постоянными магнитами с учетом частичного размагничивания» . Магнитика, транзакции IEEE включены. 2006. два : 10.1109/TMAG.2006.879077
- ^ П. Пиллэй; Р. Кришнан. «Особенности применения синхронных и бесщеточных двигателей постоянного тока с постоянными магнитами для сервоприводов» . Промышленные приложения, транзакции IEEE. 1991. дои : 10.1109/28.90357 цитировать: «Синхронный двигатель с постоянными магнитами (PMSM) и бесщеточный двигатель постоянного тока (BDCM) имеют много общего; они оба имеют постоянные магниты на роторе и требуют переменного тока статора для создания постоянного крутящего момента».
- ^ Ю. Хонда; Т. Накамура; Т. Хигаки; Ю. Такеда. «Аспекты конструкции двигателя и результаты испытаний синхронного двигателя с внутренними постоянными магнитами для электромобилей» . Конференция по отраслевым приложениям, 1997 г. Тридцать второе ежегодное собрание IAS, IAS '97., Протокол конференции IEEE 1997 г. 1997. два : 10.1109/IAS.1997.643011
- ^ М.А. Рахман; Пин Чжоу. «Анализ бесщеточных синхронных двигателей с постоянными магнитами» . Промышленная электроника, транзакции IEEE. 1996. дои : 10.1109/41.491349
- ^ Хасанпур Исфахани, Араш; Ваез-Заде, Садег (ноябрь 2009 г.). «Синхронные двигатели с линейным пуском и постоянными магнитами: проблемы и возможности». Энергия . 34 (11): 1755–1763. Бибкод : 2009Ene....34.1755H . дои : 10.1016/j.energy.2009.04.022 .
- ^ Суман, К.; Сунита, К.; Сасикала, М. (9 сентября 2020 г.). «Привод асинхронного двигателя с прямым управлением крутящим моментом и пространственно-векторной модуляцией, питаемый трехуровневым инвертором». Международная конференция IEEE по силовой электронике, приводам и энергетическим системам (PEDES) , 2012 г. стр. 1–6. дои : 10.1109/PEDES.2012.6484405 . ISBN 978-1-4673-4508-8 . S2CID 25556839 . Проверено 23 сентября 2020 г.
- ^ Ван, Чжэн; Чен, Цзянь; Ченг, Мин; Чау, КТ (9 сентября 2020 г.). «Ориентированное на поле управление и прямое управление крутящим моментом для параллельных преобразователей VSI с питанием от PMSM с переменной частотой переключения» . Транзакции IEEE по силовой электронике . 31 (3): 2417–2428. дои : 10.1109/TPEL.2015.2437893 . S2CID 19377123 . Проверено 23 сентября 2020 г.
- ^ Jump up to: а б с Готлиб, Ирвинг М. (1997). Практическое руководство по электродвигателям, 2-е изд . США: Ньюнес. стр. 73–76. ISBN 978-0-7506-3638-4 .
- ^ Майкл А. Лотон (2003), «19.2.5 Реактивные двигатели», Справочник инженера-электрика , Newnes, стр. 19 августа, ISBN 978-0-7506-4637-6
- ^ HE Jordan, Энергоэффективные электродвигатели и их применение , стр. 104, Springer, 1994 г. ISBN 0-306-44698-7
- ^ Финч и Гиаурис 2008 , стр. 483–484.
- ^ Буя и Казмерковский 2004 , стр. 745.
- ^ Финч и Гиаурис 2008 , с. 482.
- ^ Акарнли и Уотсон 2006 , с. 353.
- ^ «Скорость двигателя» . Ящик для инструментов электрика и т. д. Архивировано из оригинала 8 мая 1999 г.
- ^ «Электрическая машина» . Университет Альберты. Архивировано из оригинала 19 февраля 2013 г. Проверено 9 января 2013 г.
- ^ Финни, Дэвид (1988). Система привода двигателя переменного тока с регулируемой частотой (переиздание 1991 г.). Питер Перегринус, ООО с. 33. ISBN 978-0-86341-114-4 .
- ^ Тераджа, Б.Л. (2005). Электротехника . II (переиздание 2010 г.). С. Чанд. п. 1490. ИСБН 978-81-219-2437-5 .
- ^ Исидор Керзенбаум, Джефф Клемпнер (20 сентября 2011 г.). Справочник по эксплуатации и техническому обслуживанию больших турбогенераторов (второе изд.). Уайли. ISBN 9781118210406 .
- ^ Джеральд Б. Климан, Хамид А. Толият (03 октября 2018 г.). Справочник по электродвигателям (второе изд.). ЦРК Пресс. п. 302. ИСБН 9781420030389 .
- ^ Джордан, Ховард Э. (31 августа 1994 г.). Энергоэффективные электродвигатели и их применение . Б (Второе изд.). Пленум прессы. п. 104. ИСБН 978-0-306-44698-6 .
- ^ Тераджа, Б.Л. (2005). Электротехника . II (переиздание 2010 г.). С. Чанд. п. 1404. ИСБН 978-81-219-2437-5 .
- ^ Исидор Керзенбаум, Джефф Клемпнер (20 сентября 2011 г.). Справочник по эксплуатации и техническому обслуживанию больших турбогенераторов (второе изд.). Уайли. ISBN 9781118210406 .
- ^ Jump up to: а б Стандарт IEEE 141-1993. Рекомендуемая практика распределения электроэнергии на промышленных предприятиях, страницы 227-230.
- ^ Джерри К. Уитакер, Справочник по системам электропитания переменного тока , стр. 192, CRC Press, 2007 г. ISBN 0-8493-4034-9 .
- ^ Леду, Курт; Виссер, Пол В.; Хулин, Дж. Дуайт; Нгуен, Хиен (май 2015 г.). «Запуск больших синхронных двигателей в слабых энергосистемах» . Транзакции IEEE для промышленных приложений . 51 (3): 2676–2682. дои : 10.1109/tia.2014.2373820 . ISSN 0093-9994 .
- ^ Дэвид Финни, Система привода двигателя переменного тока с регулируемой частотой , стр. 32, IEE, 1988 г. ISBN 0-86341-114-2 .
- ^ Невелстин, Дж.; Арагон, Х. (1989). «Запуск больших двигателей-методы и экономика». Транзакции IEEE для промышленных приложений . 25 (6): 1012–1018. дои : 10.1109/28.44236 . ISSN 0093-9994 .
- ^ Шефер, Р.К. (1999). «Управление возбуждением синхронного двигателя». Транзакции IEEE для промышленных приложений . 35 (3): 694–702. дои : 10.1109/28.767025 . ISSN 0093-9994 .
- ^ Перес-Лойя, Джей-Джей; Абрахамссон, CJD; Эвестедт, Фредрик; Лундин, Урбан (2017). «Демонстрация запуска синхронного двигателя инверсией полярности ротора». Транзакции IEEE по промышленной электронике . 65 (10): 8271–8273. дои : 10.1109/tie.2017.2784342 . ISSN 0278-0046 . S2CID 46936078 .
- ^ Jump up to: а б с Бхаттачарья, СК (27 августа 2008 г.). Электрические машины (третье изд.). Тата - МакГроу Хилл. п. 481. ИСБН 9780070669215 . OCLC 808866911 .
- ^ Косов, Ирвинг Л. (сентябрь 2007 г.). Электрические машины и трансформаторы (второе изд.). Пирсон Образование. п. 230. ИСБН 9788131711279 . ОСЛК 222453 .
- ^ Тераджа, БЛ; Тхераджа А.К. Электротехника . II (переиздание 2010 г.). С Чанд. п. 1524.
- ^ Jump up to: а б Дубей Г.К. Основы электропривода . Издательство Нароса, Ченнаи. п. 254.
- ^ Пиллаи, С.К. Первый курс по электроприводам (второе изд.). Нью-эйдж интернациональный. п. 25.
Источники
[ редактировать ]- Джордан, HE (2013). Энергоэффективные электродвигатели и их применение . Спрингер США. ISBN 978-1-4899-1465-1 . Проверено 1 сентября 2023 г.
- Финч, Джон В.; Гиаурис, Дамиан (2008). «Управляемые электроприводы переменного тока» (PDF) . Транзакции IEEE по промышленной электронике . 55 (2). Институт инженеров по электротехнике и электронике (IEEE): 481–491. дои : 10.1109/tie.2007.911209 . ISSN 0278-0046 .
- Акарнли, ПП; Уотсон, Дж. Ф. (2006). «Обзор работы бесщеточных машин с постоянными магнитами без датчиков положения» (PDF) . Транзакции IEEE по промышленной электронике . 53 (2). Институт инженеров по электротехнике и электронике (IEEE): 352–362. дои : 10.1109/tie.2006.870868 . ISSN 0278-0046 .
- Бужа, Г.С.; Казмерковский, депутат (2004). «Прямое управление крутящим моментом двигателей переменного тока с ШИМ-инвертором — обзор». Транзакции IEEE по промышленной электронике . 51 (4). Институт инженеров по электротехнике и электронике (IEEE): 744–757. дои : 10.1109/tie.2004.831717 . ISSN 0278-0046 .
Внешние ссылки
[ редактировать ]| Базы данных органов управления : Национальные |
|---|