GPS-сигналы


| Геодезия |
|---|
 |
Сигналы GPS передаются спутниками Глобальной системы позиционирования для обеспечения спутниковой навигации . Приемники на поверхности Земли или вблизи нее могут определять местоположение, время и скорость , используя эту информацию. GPS Группировка спутников управляется 2-й эскадрильей космических операций (2SOPS) космического корабля «Дельта-8» США Космических сил .
Сигналы GPS включают в себя сигналы дальности, которые используются для измерения расстояния до спутника, и навигационные сообщения. Навигационные сообщения включают данные эфемерид , которые используются как в трилатерации для расчета положения каждого спутника на орбите, так и для предоставления информации о времени и состоянии всей группировки спутников, называемой альманахом .
Существует четыре спецификации сигнала GPS, предназначенные для гражданского использования. В порядке даты введения это: L1 C/A , L2C , L5 и L1C . [1] L1 C/A также называется устаревшим сигналом и транслируется всеми действующими в настоящее время спутниками. L2C, L5 и L1C являются модернизированными сигналами и транслируются только более новыми спутниками (или еще не транслируются вообще). Кроме того, по состоянию на январь 2021 г. [update], ни один из этих трех сигналов пока не считается полностью готовым к использованию в гражданских целях. В дополнение к четырем вышеупомянутым сигналам существуют ограниченные сигналы с опубликованными частотами и скоростями передачи чипов , но в сигналах используется зашифрованное кодирование, что ограничивает их использование авторизованными сторонами. Гражданские лица все еще могут ограниченно использовать ограниченные сигналы без расшифровки; это называется бескодовым и полубескодовым доступом, и это официально поддерживается. [2] [3]
Интерфейс пользовательского сегмента ( приемники GPS ) описан в Документах управления интерфейсом (ICD) . Формат гражданских сигналов описан в Спецификации интерфейса (IS), которая является подмножеством ICD.
Общие характеристики
[ редактировать ]Спутники GPS ( они называются космическими аппаратами в документации по спецификациям интерфейса GPS ) передают одновременно несколько кодов дальности и навигационных данных с использованием двоичной фазовой манипуляции (BPSK).Используется только ограниченное количество центральных частот. Спутники, использующие одну и ту же частоту, различаются использованием разных кодов дальности. Другими словами, GPS использует множественный доступ с кодовым разделением каналов . Коды ранжирования также называются чиповыми кодами (в отношении CDMA/ DSSS ), псевдослучайным шумом и псевдослучайными двоичными последовательностями (в связи с тем фактом, что последовательности предсказуемы, но статистически они напоминают шум).
Некоторые спутники передают несколько потоков BPSK на одной и той же частоте в квадратуре, в форме квадратурной амплитудной модуляции . Однако, в отличие от типичных систем QAM, где один поток битов разделяется на два потока битов с половинной скоростью передачи символов для повышения спектральной эффективности , синфазные и квадратурные компоненты сигналов GPS модулируются отдельными (но функционально связанными) потоками битов.
Спутники однозначно идентифицируются по серийному номеру, называемому номером космического корабля (SVN), который не меняется в течение срока службы. Кроме того, все действующие спутники пронумерованы идентификатором космического аппарата (SV ID) и числом псевдослучайного шума (номер PRN), которые однозначно идентифицируют коды дальности, которые использует спутник. Между идентификаторами SV и номерами PRN существует фиксированное однозначное соответствие, описанное в спецификации интерфейса. [4] В отличие от SVN, идентификатор SV/номер PRN спутника может быть изменен (что приводит к изменению используемых им кодов дальности). То есть никакие два активных спутника не могут иметь один и тот же активный номер SV ID/PRN. Текущие номера SVN и PRN для группировки GPS опубликованы на сайте NAVCEN .
Устаревшие сигналы GPS
[ редактировать ]Исходная конструкция GPS содержит два кода дальности: код грубого определения местоположения (C/A), который находится в свободном доступе, и код ограниченной точности (P), обычно предназначенный для военных приложений.
Информация о частоте
[ редактировать ]
Чтобы коды дальности и навигационное сообщение передавались от спутника к приемнику, они должны быть промодулированы несущей волной . В случае оригинальной конструкции GPS используются две частоты; один на частоте 1575,42 МГц (10,23 МГц × 154), называемый L1; и второй на частоте 1227,60 МГц (10,23 МГц × 120), называемый L2.
Код C/A передается на частоте L1 как сигнал 1,023 МГц с использованием метода модуляции двухфазной манипуляции ( BPSK ). P(Y)-код передается на частотах L1 и L2 как сигнал 10,23 МГц с использованием той же модуляции BPSK, однако несущая P(Y)-кода находится в квадратуре с несущей C/A (это означает, что она равна 90 ° не в фазе ).
Помимо избыточности и повышенной устойчивости к помехам, важным преимуществом передачи двух частот с одного спутника является возможность напрямую измерять и, следовательно, устранять ошибку ионосферной задержки для этого спутника. Без такого измерения приемник GPS должен использовать общую модель или получать ионосферные поправки из другого источника (например, глобальной системы дополнений или WAAS ). Достижения в технологиях, используемых как в спутниках GPS, так и в приемниках GPS, сделали ионосферную задержку крупнейшим оставшимся источником ошибок в сигнале. Приемник, способный выполнять такое измерение, может быть значительно более точным и обычно называется двухчастотным приемником .
Коды модуляции
[ редактировать ]Грубый код/код получения
[ редактировать ]Коды C/A PRN представляют собой коды Голда с периодом 1023 чипа, передаваемые со скоростью 1,023 Mчип/с, что приводит к повторению кода каждую 1 миллисекунду. Они эксклюзивно управляются со скоростью 50 бит/с навигационным сообщением , а фаза результата модулирует несущую, как описано ранее . Эти коды совпадают или сильно автокоррелируют только тогда, когда они почти точно выровнены. Каждый спутник использует уникальный код PRN, который плохо коррелирует с кодом PRN любого другого спутника. Другими словами, коды PRN сильно ортогональны друг другу. Период кода C/A в 1 мс соответствует расстоянию 299,8 км, а каждый чип соответствует расстоянию 293 м. Приемники хорошо отслеживают эти коды с точностью до одного чипа, поэтому погрешность измерения значительно меньше 293 м. [ на сколько? ]
Коды C/A генерируются путем объединения (с использованием «исключающего или») двух битовых потоков, каждый из которых генерируется двумя разными 10 -ступенчатыми регистрами сдвига с линейной обратной связью (LFSR) с разными максимальными периодами. Различные коды получаются путем выборочной задержки одного из этих битовых потоков. Таким образом:
- C/A я ( т ) знак равно А ( т ) ⊕ B ( т - D я )
где:
- C/A i — код с номером PRN i .
- A — это выход первого LFSR, полином генератора которого равен x → x. 10 + х 3 + 1, а исходное состояние — 1111111111 2 .
- B — выход второго LFSR, полином генератора которого равен x → x. 10 + х 9 + х 8 + х 6 + х 3 + х 2 + 1 и начальное состояние также 1111111111 2 .
- D i представляет собой задержку (на целое число периодов), специфичную для каждого номера PRN i ; оно указано в спецификации интерфейса GPS. [4]
- ⊕ является эксклюзивным или.
Аргументами функций здесь являются количество битов или чипов с момента их эпох, начиная с 0. Эпоха LFSR — это точка, в которой они находятся в исходном состоянии; а для общих кодов C/A это начало любой секунды UTC плюс любое целое число миллисекунд. Выход LFSR при отрицательных аргументах определяется в соответствии с периодом, который составляет 1023 чипа (это условие необходимо, поскольку B может иметь отрицательный аргумент, используя приведенное выше уравнение).
Задержка для номеров PRN 34 и 37 одинакова; поэтому их коды C/A идентичны и не передаются одновременно [5] (это может сделать один или оба этих сигнала непригодными для использования из-за взаимных помех, в зависимости от относительных уровней мощности, принимаемых каждым приемником GPS).
Прецизионный код
[ редактировать ]P-код представляет собой последовательность PRN, намного длиннее, чем код C/A: 6,187104 x 10. 12 чипсы. Несмотря на то, что скорость передачи чипов P-кода (10,23 Мчип/с) в десять раз превышает скорость кода C/A, она повторяется только один раз в неделю, что исключает неоднозначность диапазона. Предполагалось, что приемники не могут напрямую получить такой длинный и быстрый код, поэтому они сначала «загрузятся» с кодом C/A, чтобы получить эфемериды космического корабля , произвести приблизительное определение времени и местоположения, а затем получить P-код. чтобы уточнить исправление.
Хотя PRN C/A уникальны для каждого спутника, каждый спутник передает отдельный сегмент главной последовательности P-кода размером примерно 2,35 x 10. 14 длина фишек (235 000 000 000 000 фишек). Каждый спутник неоднократно передает назначенный ему сегмент мастер-кода, возобновляя передачу каждое воскресенье в 00:00:00 по времени GPS. Для справки: эпохой GPS было воскресенье, 6 января 1980 года, 00:00:00 UTC, но GPS не соответствует UTC в точности, поскольку время GPS не включает дополнительные секунды. Таким образом, время GPS опережает время UTC на целое (целое) количество секунд.
Код P является общедоступным, поэтому, чтобы предотвратить использование неавторизованными пользователями или потенциальное вмешательство в него посредством подмены , P-код объединяется с помощью XOR с W-кодом , криптографически сгенерированной последовательностью, для создания Y-кода . Y-код — это то, что передают спутники с момента модуля защиты от спуфинга включения . Зашифрованный сигнал называется P(Y)-кодом .
Детали W-кода секретны, но известно, что он применяется к P-коду примерно на частоте 500 кГц. [6] примерно в 20 раз медленнее, чем скорость чипа P-кода. Это привело к полубескодовым подходам для отслеживания сигнала P(Y) без знания W-кода.
Навигационное сообщение
[ редактировать ]| Суб- рамка | Слово | Описание |
|---|---|---|
| 1 | 1–2 | Слова телеметрии и передачи (ТЛМ и КАК) |
| 3–10 | Спутниковые часы, соотношение времени по GPS | |
| 2–3 | 1–2 | Слова телеметрии и передачи (ТЛМ и КАК) |
| 3–10 | Эфемериды (точная орбита спутника) | |
| 4–5 | 1–2 | Слова телеметрии и передачи (ТЛМ и КАК) |
| 3–10 | Компонент альманаха (обзор спутниковой сети, исправление ошибок) |
В дополнение к кодам дальности PRN приемнику необходимо знать время и положение каждого активного спутника. GPS кодирует эту информацию в навигационное сообщение и модулирует ее как кодами дальности C/A, так и P(Y) со скоростью 50 бит/с. Формат навигационного сообщения, описанный в этом разделе, называется данными LNAV (для устаревшей навигации ).
Навигационное сообщение передает информацию трех типов:
- Дата и время GPS, а также статус спутника.
- Эфемериды : точная информация об орбите передающего спутника.
- Альманах: информация о состоянии и орбите низкого разрешения для каждого спутника.
Эфемериды действительны всего четыре часа, тогда как альманах действителен – с небольшим снижением точности – до двух недель. [7] Приемник использует альманах для обнаружения набора спутников на основе сохраненного времени и местоположения. Когда приемник обнаруживает каждый спутник, эфемериды каждого спутника декодируются, чтобы спутник можно было использовать для навигации.
Навигационное сообщение состоит из 30-секундных кадров длиной 1500 бит, разделенных на пять 6-секундных подкадров по десять 30-битных слов каждый. Каждый подкадр имеет время GPS с шагом 6 секунд. Подкадр 1 содержит дату GPS (номер недели), информацию о коррекции часов спутника, состояние спутника и состояние спутника. Подкадры 2 и 3 вместе содержат данные эфемерид передающего спутника. Подкадры 4 и 5 содержат страницы с 1 по 25 25-страничного альманаха. Длина альманаха составляет 15 000 бит, а время передачи составляет 12,5 минут.
Кадр начинается в начале недели GPS и далее каждые 30 секунд. Каждая неделя начинается с передачи альманаха 1 стр. [8]
Существует два типа навигационных сообщений: LNAV-L используется спутниками с номерами PRN от 1 до 32 (называемыми нижними номерами PRN ), а LNAV-U используется спутниками с номерами PRN от 33 до 63 (называемыми верхними номерами PRN ). [9] Оба типа используют очень похожие форматы. Подкадры с 1 по 3 одинаковы, [10] а подкадры 4 и 5 практически одинаковы. Каждый тип сообщения содержит данные альманаха для всех спутников, использующих один и тот же тип навигационного сообщения, но не другой.
Каждый подкадр начинается со слова телеметрии (TLM), которое позволяет приемнику обнаружить начало подкадра и определить тактовое время приемника, в которое начинается навигационный подкадр. Далее идет слово передачи обслуживания (HOW), указывающее время GPS (как время, когда будет передан первый бит следующего подкадра) и идентифицирующее конкретный подкадр в полном кадре. [11] [12] Остальные восемь слов подкадра содержат фактические данные, относящиеся к этому подкадру. Каждое слово включает в себя 6 битов четности, генерируемых с использованием алгоритма, основанного на кодах Хэмминга, который учитывает 24 бита нечетности этого слова и последние 2 бита предыдущего слова.
После того, как подкадр был прочитан и интерпретирован, время отправки следующего подкадра может быть рассчитано с использованием данных коррекции часов и КАК. Приемник знает время часов приемника, когда было получено начало следующего подкадра, из обнаружения слова телеметрии, что позволяет вычислить время прохождения и, следовательно, псевдодальность.
Время
[ редактировать ]Время GPS выражается с разрешением 1,5 секунды в виде номера недели и времени недели (TOW). [13] Его нулевая точка (неделя 0, TOW 0) определяется как 1980-01-06T00:00Z. Счетчик TOW представляет собой значение в диапазоне от 0 до 403 199, что означает количество периодов длительностью 1,5 секунды, прошедших с начала недели GPS. Таким образом, для выражения количества TOW требуется 19 бит (2 19 = 524 288). Время GPS представляет собой непрерывную шкалу времени, не включающую високосные секунды; поэтому начало/конец недель GPS может отличаться от соответствующего дня UTC на целое (целое) число секунд.
В каждом подкадре каждое слово передачи обслуживания (HOW) содержит старшие 17 бит счетчика TOW, соответствующие началу следующего подкадра. [14] Обратите внимание, что 2 младших бита можно безопасно опустить, поскольку одно слово HOW появляется в навигационном сообщении каждые 6 секунд, что соответствует разрешению его усеченного счетчика TOW. Аналогично, усеченное значение TOW представляет собой продолжительность времени с момента начала/конца последней недели GPS до начала следующего кадра в единицах по 6 секунд.
Каждый кадр содержит (в подкадре 1) 10 младших битов соответствующего номера недели GPS. [15] Обратите внимание, что каждый кадр полностью находится в пределах одной недели GPS, поскольку кадры GPS не пересекают границы недель GPS. [16] Поскольку обновление происходит каждые 1024 GPS-недели (приблизительно каждые 19,6 года; 1024 — это 2 10 ), получателю, который вычисляет текущие календарные даты, необходимо вывести старшие биты номера недели или получить их из другого источника. Один из возможных методов состоит в том, чтобы приемник сохранял свою текущую дату в памяти при выключении, а при включении предполагал, что вновь декодированный усеченный номер недели соответствует периоду в 1024 недели, который начинается с последней сохраненной даты. Этот метод правильно определяет полный номер недели, если приемник никогда не остается выключенным (или без фиксации времени и положения) более 1024 недель (~ 19,6 лет).
Альманах
[ редактировать ]Альманах универсальным состоит из приблизительной информации об орбите и состоянии каждого спутника в созвездии, модели ионосферы и информации, позволяющей соотнести время, полученное GPS, с координированным временем (UTC). Каждый кадр содержит часть альманаха (в подкадрах 4 и 5), а полный альманах передается каждым спутником всего в 25 кадрах (требуется 12,5 минут). [17] Альманах служит нескольким целям. Первый заключается в оказании помощи в обнаружении спутников при включении питания, позволяя приемнику генерировать список видимых спутников на основе сохраненных координат и времени, в то время как эфемериды от каждого спутника необходимы для расчета координат местоположения с использованием этого спутника. В старом оборудовании отсутствие альманаха в новом приемнике приводило к длительным задержкам перед предоставлением действительного местоположения, поскольку поиск каждого спутника был медленным процессом. Развитие аппаратного обеспечения значительно ускорило процесс сбора данных, поэтому отсутствие альманаха больше не является проблемой. Вторая цель — сопоставить время, полученное по GPS (так называемое время GPS), с международным стандартом времени UTC . Наконец, альманах позволяет одночастотному приемнику корректировать ошибку ионосферной задержки , используя глобальную ионосферную модель. Поправки не такие точные, как у дополнения GNSS, систем таких как WAAS или двухчастотные приемники. Однако зачастую это лучше, чем отсутствие коррекции, поскольку ионосферная ошибка является крупнейшим источником ошибок для одночастотного приемника GPS.
Структура подкадров 4 и 5
[ редактировать ]
|
|
Обновления данных
[ редактировать ]Спутниковые данные обновляются обычно каждые 24 часа, при этом загружаются данные за 60 дней на случай, если произойдет сбой в возможности регулярного обновления. Обычно обновления содержат новые эфемериды, при этом новые альманахи загружаются реже. Сегмент управления гарантирует, что при нормальной работе новый альманах будет загружаться как минимум каждые 6 дней.
Спутники передают новые эфемериды каждые два часа. Эфемериды обычно действительны в течение 4 часов с возможностью обновления каждые 4 часа или дольше в неноминальных условиях. Время, необходимое для получения эфемерид, становится важным элементом задержки до первого определения местоположения, поскольку по мере того, как оборудование приемника становится более функциональным, время захвата спутниковых сигналов сокращается; однако для получения эфемеридных данных требуется от 18 до 36 секунд из-за низкой скорости передачи данных.
Модернизация и дополнительные сигналы GPS
[ редактировать ]Достигнув полной боеспособности 17 июля 1995 г. [20] система GPS достигла своих первоначальных целей. Однако дополнительные достижения в технологии и новые требования к существующей системе привели к попыткам «модернизировать» систему GPS. Заявления вице-президента и Белого дома в 1998 году ознаменовали начало этих изменений, а в 2000 году Конгресс США подтвердил усилия, получившие название GPS III .
Проект включает в себя новые наземные станции и новые спутники с дополнительными навигационными сигналами как для гражданских, так и для военных пользователей. Он направлен на повышение точности и доступности для всех пользователей. Была установлена цель реализации на 2013 год, и подрядчикам были предложены стимулы, если они смогут завершить ее к 2011 году.
Общие характеристики
[ редактировать ]
Модернизированные гражданские сигналы GPS имеют два общих улучшения по сравнению со своими устаревшими аналогами: помощь в сборе без данных и кодирование с упреждающим исправлением ошибок (FEC) сообщения NAV.
Средство сбора данных без данных представляет собой дополнительный сигнал, в некоторых случаях называемый пилотной несущей, транслируемый вместе с сигналом данных. Этот сигнал без данных разработан таким образом, чтобы его было легче получить, чем закодированные данные, и после успешного получения его можно использовать для получения сигнала данных. Этот метод улучшает прием сигнала GPS и повышает уровень мощности коррелятора.
Второе достижение заключается в использовании кодирования с прямой коррекцией ошибок (FEC) в самом сообщении NAV. Из-за относительно низкой скорости передачи данных NAV (обычно 50 бит в секунду) небольшие прерывания могут иметь потенциально серьезные последствия. Таким образом, FEC в сообщении NAV обеспечивает значительное улучшение общей устойчивости сигнала.
L2C
[ редактировать ]Одним из первых объявлений было добавление нового сигнала гражданского назначения, который будет передаваться на частоте, отличной от частоты L1, используемой для сигнала грубого обнаружения/захвата (C/A). В конечном итоге это стал сигнал L2C, названный так потому, что он транслируется на частоте L2. Поскольку для этого требуется новое оборудование на борту спутника, оно передается только с помощью так называемых спутников Block IIR-M и более поздних моделей. Задача сигнала L2C — повысить точность навигации, обеспечить удобство отслеживания сигнала и действовать как резервный сигнал в случае локализованных помех. Сигналы L2C начали транслироваться с апреля 2014 года на спутниках, способных его транслировать, но все еще считаются предоперационными. [1] По состоянию на январь 2021 г. [update]L2C транслируется на 23 спутниках и, как ожидается, к 2023 году будет транслироваться на 24 спутниках. [1]
В отличие от кода C/A, L2C содержит две отдельные последовательности кода PRN для предоставления информации о дальности; гражданский код средней длины (называемый CM) и гражданский код большой длины (называемый CL). Код CM имеет длину 10 230 чипов и повторяется каждые 20 мс. Код CL имеет длину 767 250 чипов и повторяется каждые 1500 мс. Каждый сигнал передается со скоростью 511 500 чипов в секунду ( чип/с ); однако они мультиплексируются вместе, образуя сигнал со скоростью 1 023 000 элементов/с.
CM модулируется навигационным сообщением CNAV (см. ниже), тогда как CL не содержит никаких модулированных данных и называется последовательностью без данных . Длинная последовательность без данных обеспечивает корреляцию примерно на 24 дБ большую (~ в 250 раз сильнее), чем C/A-код L1.
По сравнению с сигналом C/A, L2C обеспечивает на 2,7 дБ лучшее восстановление данных и на 0,7 дБ лучшее отслеживание несущей, хотя его мощность передачи на 2,3 дБ слабее.
Текущий статус сигнала L2C по состоянию на 3 июля 2023 г. [21] является:
- Предоперационный сигнал с набором сообщений «исправен»
- Трансляция с 25 спутников GPS (по состоянию на 3 июля 2023 г.)
- Запуск начался в 2005 году с GPS Block IIR-M.
- Доступно на 24 спутниках GPS с возможностью управления наземным сегментом к 2023 году (по состоянию на январь 2020 года).
Коды CM и CL
[ редактировать ]Гражданский-средний и гражданский-дальний коды генерируются модульным LFSR , который периодически сбрасывается в заранее определенное исходное состояние. Период CM и CL определяется этим сбросом, а не собственным периодом LFSR (как в случае с кодом C/A). Начальные состояния обозначены в спецификации интерфейса и различны для разных номеров PRN и для CM/CL. Полином/маска обратной связи одинакова для CM и CL. Таким образом, коды дальности определяются следующим образом:
- CM я ( т ) = А ( Икс я , т мод 10 230)
- CL я ( т ) = А ( Y я , т мод 767 250)
где:
- CM i и CL i — это коды ранжирования для номера PRN i, а их аргументы — это целое число чипов, прошедших (начиная с 0) с начала/конца недели GPS или, что эквивалентно, с момента начала шкалы времени GPS (см. § Время ).
- A ( x , t ) — это выход LFSR при инициализации с начальным состоянием x после тактирования t раз.
- X i и Y i — начальные состояния для CM и CL соответственно. для номера PRN .
- mod — это остаток от операции деления.
- t представляет собой целое число периодов чипа CM и CL с момента начала времени GPS или, что эквивалентно, с любой секунды GPS (начиная с 0).

Начальные состояния описываются в спецификации интерфейса GPS как числа, выраженные в восьмеричном формате, в соответствии с соглашением, согласно которому состояние LFSR интерпретируется как двоичное представление числа, где выходной бит является младшим битом, а бит, в котором новые биты сдвигаются. это самый важный бит. Используя это соглашение, LFSR смещается от наиболее значимого бита к наименее значимому биту, а если смотреть в порядке с обратным порядком байтов, он смещается вправо. Состояния, называемые конечным состоянием в ИС, достигаются через 10 229 тактов для CM и через 767 249 тактов для LM (непосредственно перед сбросом в обоих случаях).
Навигационное сообщение CNAV
[ редактировать ]| Биты [23] | Информация |
|---|---|
| 1–8 | Преамбула |
| 9–14 | PRN передающего спутника |
| 15–20 | Идентификатор типа сообщения |
| 21–37 | Сокращенное количество TOW [24] |
| 38 | Флаг оповещения |
| 277–300 | Проверка циклическим избыточностью |
| Идентификатор типа | Описание |
|---|---|
| 10–11 | Эфемериды и здоровье |
| 12, 31, 37 | Параметры альманаха |
| 13–14, 34 | Дифференциальная коррекция |
| 15, 36 | Текстовые сообщения |
| 30 | Коррекция ионосферной и групповой задержки |
| 32 | Параметры ориентации Земли |
| 33 | Параметры UTC |
| 35 | Смещение времени GPS/GNSS |
Данные CNAV представляют собой обновленную версию исходного навигационного сообщения NAV. Он содержит более точное представление и номинально более точные данные, чем данные NAV. Тот же тип информации (время, статус, эфемериды и альманах) по-прежнему передается с использованием нового формата CNAV; однако вместо использования архитектуры кадр/подкадр он использует новый псевдопакетный формат, состоящий из 12-секундных 300-битных сообщений , аналогичный кадрам LNAV. Хотя кадры LNAV имеют фиксированное информационное содержание, сообщения CNAV могут относиться к одному из нескольких определенных типов. Тип кадра определяет его информативность. Сообщения не подчиняются фиксированному расписанию относительно того, какие типы сообщений будут использоваться, что обеспечивает некоторую универсальность управляющего сегмента. Однако для некоторых типов сообщений существуют нижние границы частоты их передачи.
В CNAV по крайней мере 1 из каждых 4 пакетов представляет собой эфемеридные данные, и та же нижняя граница применяется к пакетам тактовых данных. [25] Конструкция позволяет передавать самые разнообразные типы пакетов. При созвездии из 32 спутников и текущих требованиях к тому, что необходимо отправлять, используется менее 75% полосы пропускания. Определена лишь небольшая часть доступных типов пакетов; это позволяет системе расти и внедрять усовершенствования, не нарушая совместимости.
В новом сообщении CNAV есть много важных изменений:
- Он использует прямое исправление ошибок (FEC), обеспечиваемое сверточным кодом со скоростью 1/2 , поэтому, хотя скорость навигационного сообщения составляет 25 бит/с, передается сигнал со скоростью 50 бит/с.
- Сообщения содержат 24-битный CRC , по которому можно проверить целостность.
- Номер недели GPS теперь представлен в виде 13 бит, или 8192 недель, и повторяется только каждые 157,0 лет, что означает, что следующий возврат к нулю произойдет не раньше 2137 года. Это дольше по сравнению с использованием 10 в сообщении L1 NAV. -битный номер недели, который возвращается к нулю каждые 19,6 лет.
- Имеется пакет, содержащий сдвиг времени между GPS и GNSS. Это обеспечивает лучшую совместимость с другими глобальными системами передачи времени, такими как Galileo и ГЛОНАСС , которые обе поддерживаются.
- Дополнительная полоса пропускания позволяет включать пакет для дифференциальной коррекции, который будет использоваться аналогично спутниковым системам дополнения и который может использоваться для коррекции данных часов L1 NAV.
- Каждый пакет содержит флаг предупреждения, который необходимо установить, если спутниковым данным нельзя доверять. Это означает, что пользователи узнают в течение 12 секунд, если спутник больше не пригоден для использования. Такое быстрое уведомление важно для приложений, обеспечивающих безопасность человеческой жизни, таких как авиация.
- Наконец, система рассчитана на поддержку 63 спутников по сравнению с 32 в сообщении L1 NAV.
Сообщения CNAV начинаются и заканчиваются в начале/конце недели GPS плюс целое число, кратное 12 секундам. [26] В частности, начало первого бита (с уже примененным кодированием свертки), содержащего информацию о сообщении, соответствует вышеупомянутой синхронизации. Сообщения CNAV начинаются с 8-битной преамбулы, которая представляет собой фиксированную битовую комбинацию и цель которой — дать возможность получателю обнаружить начало сообщения.
Код прямого исправления ошибок
[ редактировать ]Сверточный код , используемый для кодирования CNAV, описывается следующим образом:

где:
- и являются неупорядоченными выходами сверточного кодера
- — это необработанные (не закодированные FEC) навигационные данные, состоящие из простой конкатенации 300-битных сообщений.
- — целое число битов навигационных данных , не закодированных FEC, прошедших с произвольного момента времени (начиная с 0).
- — это навигационные данные, закодированные FEC.
- целое число битов навигационных данных , закодированных FEC, прошедших с той же эпохи, что и (аналогично начиная с 0).






Поскольку поток битов, закодированный FEC, работает со скоростью, в 2 раза превышающей скорость потока битов, не закодированных FEC, как уже описано, тогда . Кодирование FEC выполняется независимо от границ навигационного сообщения; [27] это следует из приведенных выше уравнений.

Информация о частоте L2C
[ редактировать ]Непосредственным эффектом передачи двух гражданских частот является то, что гражданские приемники теперь могут напрямую измерять ионосферную ошибку таким же образом, как и двухчастотные приемники с P(Y)-кодом. Однако пользователи, использующие только сигнал L2C, могут ожидать на 65% большей неопределенности местоположения из-за ионосферной ошибки, чем при использовании только сигнала L1. [28]
Военный (М-код)
[ редактировать ]Важным компонентом процесса модернизации является новый военный сигнал. Названный «Военный код» или «М-код», он был разработан для дальнейшего улучшения защиты от помех и обеспечения безопасного доступа к военным сигналам GPS.
Об этом новом ограниченном коде было опубликовано очень мало. Он содержит код PRN неизвестной длины, передаваемый на частоте 5,115 МГц. В отличие от P(Y)-кода, M-код является автономным, что означает, что пользователь может рассчитать свое положение, используя только сигнал M-кода. Согласно первоначальной конструкции P(Y)-кода, пользователи должны были сначала заблокировать код C/A, а затем перенести блокировку на P(Y)-код. Позже были разработаны методы прямого сбора данных, которые позволили некоторым пользователям автономно работать с P(Y)-кодом.
Навигационное сообщение MNAV
[ редактировать ]Немного больше известно о новом навигационном сообщении, которое называется MNAV . Подобно новому CNAV, этот новый MNAV пакетируется, а не кадрируется, что обеспечивает очень гибкую полезную нагрузку данных. Также, как и CNAV, он может использовать упреждающую коррекцию ошибок (FEC) и расширенное обнаружение ошибок (например, CRC ).
Информация о частоте М-кода
[ редактировать ]М-код передается на тех же частотах L1 и L2, которые уже использовались предыдущим военным кодом, P(Y)-кодом. Новый сигнал имеет такую форму, чтобы большая часть его энергии располагалась по краям (вдали от существующих несущих P(Y) и C/A). Он работает не на каждом спутнике, а 5 апреля 2011 года M-код был отключен для SVN62/PRN25. [29]
В отличие от предыдущих конструкций GPS, M-код предназначен для трансляции с помощью направленной антенны с высоким коэффициентом усиления в дополнение к полностью заземленной антенне. Сигнал этой направленной антенны, называемый точечным лучом, предназначен для нацеливания на определенную область (диаметром в несколько сотен километров) и увеличения мощности местного сигнала на 20 дБ, или примерно в 100 раз сильнее. Побочным эффектом наличия двух антенн является то, что спутник GPS будет выглядеть как два спутника GPS, занимающих ту же позицию, что и спутники внутри точечного луча. Хотя весь сигнал M-кода Земли доступен на спутниках Block IIR-M, антенны точечного луча не будут развернуты до тех пор, пока не будут развернуты спутники Block III , которое началось в декабре 2018 года.
Интересным побочным эффектом передачи каждым спутником четырех отдельных сигналов является то, что MNAV потенциально может передавать четыре разных канала данных, обеспечивая увеличенную полосу пропускания данных.
Метод модуляции — двоичное смещение несущей с использованием поднесущей 10,23 МГц против кода 5,115 МГц. Этот сигнал будет иметь общую полосу пропускания примерно 24 МГц со значительно разделенными лепестками боковых полос. Боковые полосы можно использовать для улучшения приема сигнала.
Л5
[ редактировать ]Сигнал L5 обеспечивает средства радионавигации, безопасные и достаточно надежные для жизненно важных приложений, таких как точное наведение на посадку самолета. Сигнал транслируется в полосе частот, защищенной МСЭ для авиационных радионавигационных служб . Впервые он был продемонстрирован со спутника USA-203 (Блок IIR-M) и доступен на всех спутниках GPS IIF и GPS III . Сигналы L5 транслируются с апреля 2014 года на спутниках, которые его поддерживают. [1]
Статус сигнала L5 по состоянию на 3 июля 2023 г. [update] является: [30]
- Предоперационный сигнал с сообщением, установленным как «неработоспособное», пока не будет установлена достаточная возможность мониторинга.
- Трансляция с 18 спутников GPS
- Планируется, что он будет доступен на 24 спутниках GPS примерно к 2027 году.
Полоса L5 обеспечивает дополнительную надежность в виде уменьшения помех, эта полоса защищена на международном уровне, дублируется с существующими полосами, дополнена геостационарными спутниками и наземным усилением. Дополнительная надежность этого диапазона также полезна для наземных приложений. [31]
Два кода ранжирования PRN передаются на L5 в квадратуре: синфазный код (называемый I5-кодом ) и квадратурно-фазовый код (называемый Q5-кодом ). Оба кода имеют длину 10230 чипов, передаются со скоростью 10,23 Мчип/с (период повторения 1 мс) и генерируются одинаково (различаются только в начальных состояниях). Затем I5 модулируется (исключающим ИЛИ) навигационными данными (называемыми L5 CNAV) и 10-битным кодом Неймана-Хофмана с тактовой частотой 1 кГц. Аналогичным образом затем модулируется код Q5, но только с помощью 20-битного кода Неймана-Хофмана, который также тактируется на частоте 1 кГц.
По сравнению с L1 C/A и L2, вот некоторые изменения в L5:
- Улучшенная структура сигнала для повышения производительности
- Более высокая передаваемая мощность, чем у сигнала L1/L2 (~ 3 дБ, или в 2 раза больше мощности)
- Более широкая полоса пропускания обеспечивает 10-кратный выигрыш в обработке , обеспечивает более точную автокорреляцию (в абсолютном выражении, а не относительно длительности элементарного сигнала) и требует более высокой частоты дискретизации на приемнике.
- Более длинные коды расширения (в 10 раз длиннее, чем C/A)
- Использует диапазон авиационной радионавигационной службы.
Коды I5 и Q5
[ редактировать ]Код I5 и код Q5 генерируются с использованием одной и той же структуры, но с разными параметрами. Эти коды представляют собой комбинацию (исключающее ИЛИ) выходных данных двух разных регистров сдвига с линейной обратной связью (LFSR), которые выборочно сбрасываются.
- 5 я ( т ) знак равно U ( т ) ⊕ V я ( т )
- U ( t ) = XA (( t mod 10,230) mod 8,190)
- V я ( т ) = XB я ( Икс я , т мод 10 230)
где:
- i — упорядоченная пара ( P , n ), где P ∈ {I, Q} для синфазной и квадратурной фазы, а n — номер PRN; для сигнала L5 от одного спутника требуются обе фазы и один PRN.
- 5 i — коды дальности для i ; также обозначается как I5 n и Q5 n .
- U и V i являются промежуточными кодами, причем U не зависит от фазы или PRN.
- выход двух 13-каскадных LFSR с состоянием часов t' Используется :
- XA ( x , t' ) имеет полином обратной связи x 13 + х 12 + х 10 + х 9 + 1 и исходное состояние 1111111111111 2 .
- XB i ( x , t' ) имеет полином обратной связи x 13 + х 12 + х 8 + х 7 + х 6 + х 4 + х 3 + x + 1 и начальное состояние X i .
- X i — начальное состояние, заданное для фазы и номера PRN, заданного i (обозначенного в ИС [32] ).
- t — целое число периодов элементарного сигнала с момента начала времени GPS или, что эквивалентно, с любой секунды GPS (начиная с 0).
A и B — LFSR максимальной длины. Операции по модулю соответствуют сбросам. Обратите внимание, что оба сбрасываются каждую миллисекунду (синхронизировано с эпохами кода C/A ). Кроме того, дополнительная операция по модулю в описании A связана с тем, что он сбрасывается на 1 цикл раньше своего естественного периода (который равен 8191), так что следующее повторение становится смещенным на 1 цикл по отношению к B. [33] (в противном случае, поскольку обе последовательности будут повторяться, I5 и Q5 также будут повторяться в течение любого периода в 1 мс, что ухудшает корреляционные характеристики).
L5 навигационное сообщение
[ редактировать ]Данные L5 CNAV включают в себя эфемериды SV, системное время, данные о поведении часов SV, сообщения о состоянии, информацию о времени и т. д. Данные со скоростью 50 бит/с кодируются с помощью сверточного кодера со скоростью 1/2. Результирующий поток символов со скоростью 100 символов в секунду (sps) добавляется по модулю 2 только к коду I5; результирующая последовательность битов используется для модуляции синфазной несущей L5 (I5). Этот комбинированный сигнал называется сигналом данных L5. Несущая квадратурной фазы L5 (Q5) не содержит данных и называется пилот-сигналом L5. Формат, используемый для L5 CNAV, очень похож на формат L2 CNAV. Единственное отличие состоит в том, что он использует в 2 раза большую скорость передачи данных. Битовые поля в каждом сообщении, [34] типы сообщений и алгоритм кода прямого исправления ошибок такие же, как у L2 CNAV . Сообщения L5 CNAV начинаются и заканчиваются в начале/конце недели GPS плюс целое число, кратное 6 секундам (это относится к началу первого бита, содержащего информацию о сообщении, как в случае с L2 CNAV). [35]
Информация о частоте L5
[ редактировать ]Вещание на частоте L5 (1176,45 МГц, 10,23 МГц × 115), которая является диапазоном воздушной навигации. Частота была выбрана таким образом, чтобы авиационное сообщество могло более эффективно управлять помехами L5, чем L2. [35]
Л1С
[ редактировать ]L1C — это сигнал гражданского назначения, который будет транслироваться на частоте L1 (1575,42 МГц), которая содержит сигнал C/A, используемый всеми нынешними пользователями GPS. Сигналы L1C будут транслироваться со спутников GPS III и более поздних версий, первый из которых был запущен в декабре 2018 года. [1] По состоянию на январь 2021 г. [update]Сигналы L1C пока не транслируются, и транслировать их способны только четыре действующих спутника. Ожидается, что L1C будет установлен на 24 спутниках GPS в конце 2020-х годов. [1]
L1C состоит из пилотного компонента (называемого L1C P ) и компонента данных (называемого L1C D ). [36] Эти компоненты используют несущие с одинаковой фазой (в пределах погрешности 100 миллирадиан ) вместо несущих в квадратуре, как в L5. [37] Коды PRN имеют длину 10 230 чипов и передаются со скоростью 1,023 Мчип/с, то есть повторяются за 10 мс. Пилотный компонент также модулируется кодом наложения, называемым L1C O (вторичный код, который имеет более низкую скорость, чем код ранжирования, и также заранее определен, как и код ранжирования). [36] Из общей мощности сигнала L1C 25% выделяется на данные и 75% на пилот-сигнал. Используемым методом модуляции является BOC (1,1) для сигнала данных и TMBOC для пилот-сигнала. по времени Несущая с двоичным смещением, мультиплексированная (TMBOC), представляет собой BOC(1,1) для всех циклов, кроме 4 из 33, когда она переключается на BOC(6,1).
- Реализация предоставит код C/A для обеспечения обратной совместимости.
- Гарантировано увеличение минимальной мощности кода C/A на 1,5 дБ для смягчения любого увеличения минимального уровня шума.
- Несущая пилот-сигнала компонента сигнала без данных улучшает отслеживание по сравнению с L1 C/A
- Обеспечивает большую гражданскую совместимость с Galileo L1.
Текущий статус сигнала L1C по состоянию на 3 июля 2023 г. [21] является:
- Сигнал развития с сообщением «нездорово» и без навигационных данных.
- Трансляция с 6 спутников GPS (по состоянию на 3 июля 2023 г.)
- Начал выпуск в 2018 году с GPS III.
- Доступно на 24 спутниках GPS в конце 2020-х годов.
Код ранжирования L1C
[ редактировать ]Коды пилот-сигнала и ранжирования данных L1C основаны на последовательности Лежандра длиной 10 223, используемой для построения промежуточного кода (называемого кодом Вейля ), который расширяется с помощью фиксированной 7-битной последовательности до необходимых 10 230 бит. Эта 10230-битная последовательность представляет собой код ранжирования и варьируется в зависимости от номера PRN, а также от компонентов пилот-сигнала и данных. Коды ранжирования описываются: [38]

где:
- это код ранга для номера PRN и компонента. .
- представляет собой период ; оно введено только для более четкого обозначения. Чтобы получить прямую формулу для начнем с правой части формулы для и заменить все экземпляры с .
- — целое число периодов чипа L1C (которое 1 ⁄ 1,023 мкс) с момента начала времени GPS или, что эквивалентно, с любой секунды GPS (начиная с 0).
- представляет собой упорядоченную пару, идентифицирующую номер PRN и код (L1C P или L1C D ), и имеет вид или где - номер PRN спутника, а являются символами (не переменными), обозначающими код L1C P или код L1C D соответственно.
- — промежуточный код: последовательность Лежандра, областью определения которой является набор целых чисел. для чего .
- представляет собой промежуточный код, называемый кодом Вейля, с той же областью действия, что и .
- представляет собой 7-битную последовательность, определенную для индексов с отсчетом от 0 от 0 до 6.
- - отсчитываемый от 0 индекс вставки последовательности, в код дальности (специфичный для номера PRN и кода ). Он определен в спецификации интерфейса (IS) как индекс, отсчитываемый от 1. , поэтому . [39]
- - индекс Вейля для номера и кода PRN обозначено в ИС. [39]
- — это остаток от операции деления (или по модулю), который отличается от обозначений в утверждениях модульного сравнения , также используемых в этой статье.


















Согласно приведенной выше формуле и GPS IS, первый бит (эквивалентно, до точки вставки ) из и являются первыми битами соответствующего кода Вейля; следующие 7 бит ; оставшиеся биты — это оставшиеся биты кода Вейля.
ИС утверждает, что . [40] Для наглядности формула не учитывает гипотетический случай, когда , что приведет к возникновению экземпляра вставлен в для переноса индекса 10 229 в 0.


Код наложения L1C
[ редактировать ]Коды наложения имеют длину 1800 бит и передаются со скоростью 100 бит/с, синхронизируясь с навигационным сообщением, закодированным в L1C D .
Для номеров PRN от 1 до 63 они представляют собой усеченные выходные данные LFSR максимального периода, которые различаются начальными условиями и полиномами обратной связи. [41]
Для номеров PRN от 64 до 210 это усеченные коды Голда, сгенерированные путем объединения двух выходов LFSR ( и , где — номер PRN), исходное состояние которого варьируется. имеет один из 4 полиномов обратной связи, используемых в целом (среди номеров PRN 64–210). имеет одинаковый полином обратной связи для всех номеров PRN в диапазоне 64–210. [42]


Навигационное сообщение CNAV-2
[ редактировать ]| Подрамник | Количество битов | Описание | |
|---|---|---|---|
| Сырой | Закодированный | ||
| 1 | 9 | 52 | Время интервала (TOI) |
| 2 | 576 | 1,200 | Коррекция времени и эфемерные данные |
| 3 | 250 | 548 | Переменные данные |
| Номер страницы. | Описание |
|---|---|
| 1 | UTC и ИОНО |
| 2 | ГГТО и ЕОП |
| 3 | Сокращенный альманах |
| 4 | Миди-альманах |
| 5 | Дифференциальная коррекция |
| 6 | Текст |
Навигационные данные L1C (называемые CNAV-2) передаются в кадрах длиной 1800 бит (включая FEC) и передаются со скоростью 100 бит/с.
Кадры L1C аналогичны сообщениям L2C и L5. Хотя L2 CNAV и L5 CNAV используют специальный тип сообщения для данных эфемерид, все кадры CNAV-2 включают эту информацию.
Общая структура всех сообщений состоит из 3 кадров, как указано в соседней таблице. Содержимое подкадра 3 варьируется в зависимости от номера его страницы, который аналогичен номеру типа сообщений L2 CNAV и L5 CNAV. Страницы транслируются в произвольном порядке. [43]
Время сообщений (не путать с параметрами коррекции часов) выражается в формате, отличном от формата предыдущих гражданских сигналов. Вместо этого он состоит из 3 компонентов:
- Номер недели имеет то же значение, что и другие гражданские сигналы. Каждое сообщение содержит номер недели по модулю 8192 или, что эквивалентно, 13 младших битов номера недели, что позволяет напрямую указывать любую дату в циклическом 157-летнем диапазоне.
- Интервал недели (ITOW): целое число двухчасовых периодов, прошедших с момента последнего начала/конца недели. Он имеет диапазон от 0 до 83 (включительно), поэтому для кодирования требуется 7 бит.
- Время интервала (TOI): целое число 18-секундных периодов, прошедших с момента периода, представленного текущим ITOW, до начала следующего сообщения. Он имеет диапазон от 0 до 399 (включительно) и требует 9 бит данных.
TOI — это единственное содержимое подкадра 1. Номер недели и ITOW содержатся в подкадре 2 вместе с другой информацией.
Подкадр 1 кодируется модифицированным кодом BCH . В частности, 8 младших битов кодируются BCH для создания 51 бита, затем объединяются с использованием исключающего бита или самого старшего бита, и, наконец, самый старший бит добавляется как самый старший бит предыдущего результата для получения окончательных 52 битов. [44] Подкадры 2 и 3 индивидуально расширяются с помощью 24-битной CRC , затем индивидуально кодируются с использованием кода проверки четности низкой плотности , а затем чередуются как единое целое с использованием блочного перемежителя. [45]
Обзор частот
[ редактировать ]| Группа | Частота (МГц) | Фаза | Исходное использование | Модернизированное использование |
|---|---|---|---|---|
| Л1 | 1575.42 (10.23 × 154) | я | Зашифрованный точный код P(Y) | |
| вопрос | Код грубой обработки/сбора данных (C/A) | C/A, Гражданский L1 (L1C) и Военный (М) код | ||
| Л2 | 1227.60 (10.23 × 120) | я | Зашифрованный точный код P(Y) | |
| вопрос | немодулированная несущая | Гражданский код L2 (L2C) и Военный (М) код | ||
| Л3 | 1381.05 (10.23 × 135) | используется ядерным взрывом (NUDET) Система обнаружения Полезная нагрузка (НДС): сигнализирует о ядерных взрывах/ высокоэнергетические инфракрасные события. Используется для проведения ядерных испытаний. запретить договоры. | ||
| Л4 | 1379.9133... (10.23 × 1214/9) | — | изучается для получения дополнительной ионосферная коррекция [46] : 607 | |
| Л5 | 1176.45 (10.23 × 115) | я | — | Сигнал данных безопасности жизни (SoL) |
| вопрос | Пилотный сигнал безопасности жизни (SoL) | |||
Все спутники вещают на одних и тех же двух частотах: 1,57542 ГГц (сигнал L1) и 1,2276 ГГц (сигнал L2). Спутниковая сеть использует метод расширения спектра CDMA, при котором данные сообщения с низкой скоростью передачи данных кодируются с помощью высокоскоростной последовательности псевдослучайного шума (PRN), которая различна для каждого спутника. Получатель должен знать коды PRN для каждого спутника, чтобы восстановить фактические данные сообщения. Код C/A для гражданского использования передает данные со скоростью 1,023 миллиона чипов в секунду, тогда как код P для военного использования США передает со скоростью 10,23 миллиона чипов в секунду. Несущая L1 модулируется как кодами C/A, так и P, тогда как несущая L2 модулируется только кодом P. [47] Код P может быть зашифрован как так называемый код P(Y), который доступен только для военной техники с соответствующим ключом дешифрования. Коды C/A и P(Y) сообщают пользователю точное время суток.
Каждый составной сигнал (синфазный и квадратурный) становится:

где и представляют мощности сигналов; и представлять коды с данными или без них . Это формула для идеального случая (который на практике не достигается), поскольку она не моделирует ошибки синхронизации, шум, несоответствие амплитуд между компонентами или квадратурную ошибку (когда компоненты не находятся точно в квадратуре).





Демодуляция и декодирование
[ редактировать ]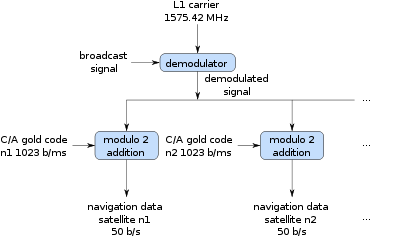
Приёмник GPS обрабатывает сигналы GPS, полученные его антенной, для определения положения, скорости и/или времени. Сигнал на антенне усиливается, преобразуется с понижением частоты в базовую полосу или промежуточную частоту, фильтруется (чтобы удалить частоты за пределами предполагаемого диапазона частот для цифрового сигнала, который будет накладываться на него) и оцифровывается; эти шаги могут быть связаны в другом порядке. Обратите внимание, что наложение псевдонимов иногда является преднамеренным (в частности, когда используется недостаточная дискретизация ), но фильтрация по-прежнему требуется для отбрасывания частот, которые не должны присутствовать в цифровом представлении.
Для каждого спутника, используемого приемником, приемник должен сначала получить сигнал, а затем отслеживать его, пока этот спутник используется; в большинстве (если не во всех) приемниках оба выполняются в цифровом формате.
Получение сигнала — это процесс определения частоты и фазы кода (оба относительно времени приемника), когда они ранее были неизвестны. Фаза кода должна определяться с точностью, которая зависит от конструкции приемника (особенно контура слежения); Репрезентативным значением является 0,5-кратная длительность кодовых чипов (около 0,489 мкс).
Отслеживание — это процесс непрерывной регулировки предполагаемой частоты и фазы для максимально точного соответствия принимаемому сигналу и, следовательно, представляет собой систему фазовой автоподстройки частоты . Обратите внимание, что захват выполняется для начала использования определенного спутника, но отслеживание выполняется до тех пор, пока этот спутник используется.
В этом разделе описана одна возможная процедура для обнаружения и отслеживания C/A L1, но процесс очень похож для других сигналов. Описанная процедура основана на вычислении корреляции принятого сигнала с локально сгенерированной копией кода измерения дальности и обнаружении самого высокого пика или самого низкого впадины. Смещение самого высокого пика или самого низкого впадины содержит информацию о фазе кода относительно времени приемника. Длительность локальной реплики задается конструкцией приемника и обычно короче, чем длительность битов навигационных данных, которая составляет 20 мс.
Приобретение
[ редактировать ]Получение заданного номера PRN можно представить как поиск сигнала в двумерном пространстве поиска, измерениями которого являются (1) фаза кода, (2) частота. Кроме того, получатель может не знать, какой номер PRN искать, и в этом случае к пространству поиска добавляется третье измерение: (3) номер PRN.
- Частотное пространство
- Частотный диапазон пространства поиска — это полоса, в которой сигнал может находиться с учетом знаний приемника. изменяется Несущая частота примерно на 5 кГц из-за эффекта Доплера, когда приемник неподвижен; если приемник движется, отклонение выше. Отклонение частоты кода составляет 1/1540 от отклонения несущей частоты для L1, поскольку частота кода составляет 1/1540 от несущей частоты (см. § Частоты, используемые GPS ). Преобразование с понижением частоты не влияет на девиацию частоты; он только сдвигает все частотные компоненты сигнала вниз. Поскольку частота привязана ко времени приемника, неопределенность частоты генератора приемника увеличивает частотный диапазон пространства поиска.
- Фазовое пространство кода
- Код определения дальности имеет период 1023 чипов, каждый из которых длится примерно 0,977 мкс (см. § Грубый код/код обнаружения ). Код дает сильную автокорреляцию только при смещениях менее 1 по величине. Размер пространства поиска в измерении фазы кода зависит от степени детализации смещений, при которых вычисляется корреляция. Обычно поиск фазы кода осуществляется с точностью до 0,5 чипа или меньше; это означает 2046 смещений. Может существовать больше факторов, увеличивающих размер пространства поиска фазы кода. Например, приемник может быть спроектирован таким образом, чтобы проверять два последовательных окна оцифрованного сигнала так, чтобы по крайней мере одно из них не содержало перехода навигационного бита (что ухудшает пик корреляции); для этого требуется, чтобы окна сигналов имели продолжительность не более 10 мс.
- Пространство номера PRN
- Младшие номера PRN находятся в диапазоне от 1 до 32, и поэтому существует 32 номера PRN для поиска, когда у получателя нет информации, позволяющей сузить поиск в этом измерении. Более высокие номера PRN варьируются от 33 до 66. См. § Навигационное сообщение .
Если информация альманаха была получена ранее, приемник выбирает, какие спутники прослушивать, по их PRN. Если информация альманаха отсутствует в памяти, приемник входит в режим поиска и циклически перебирает номера PRN, пока не будет получена блокировка одного из спутников. Для получения захвата необходимо, чтобы от приемника до спутника была беспрепятственная прямая видимость. Затем приемник может декодировать альманах и определить спутники, которые ему следует прослушивать. Обнаружив сигнал каждого спутника, он идентифицирует его по отдельному шаблону кода C/A.
Простая корреляция
[ редактировать ]Самый простой способ получить сигнал (не обязательно самый эффективный или наименее затратный с точки зрения вычислений) — вычислить скалярное произведение окна оцифрованного сигнала с набором локально сгенерированных реплик. Локально сгенерированные реплики различаются по несущей частоте и фазе кода, чтобы охватить все уже упомянутое пространство поиска, которое является декартовым произведением пространства поиска частоты и пространства поиска фазы кода. Несущая — это комплексное число, где действительные и мнимые компоненты являются синусоидами , как описано в формуле Эйлера . Реплика, которая генерирует наибольшую величину скалярного произведения, вероятно, лучше всего соответствует фазе кода и частоте сигнала; поэтому, если эта величина превышает пороговое значение, приемник приступает к отслеживанию сигнала или дополнительно уточняет оцененные параметры перед отслеживанием. Порог используется для минимизации ложных срабатываний (очевидно, обнаружение сигнала тогда, когда на самом деле сигнала нет), но некоторые из них все же могут время от времени возникать.
Использование комплексной несущей позволяет репликам сопоставлять оцифрованный сигнал независимо от фазы несущей сигнала и обнаруживать эту фазу (принцип тот же, что и при преобразовании Фурье ). Скалярное произведение представляет собой комплексное число; его величина представляет собой уровень сходства между репликой и сигналом, как и в случае обычной корреляции вещественных временных рядов. Аргумент скалярного произведения представляет собой аппроксимацию соответствующей несущей в оцифрованном сигнале.
В качестве примера предположим, что степень детализации поиска по фазе кода составляет 0,5 чипа, а по частоте — 500 Гц, тогда необходимо попробовать 1023/0,5 = 2046 фаз кода и 10 000 Гц/500 Гц = 20 частот , всего 20. ×2046 = 40920 локальных реплик . Обратите внимание, что каждый интервал частоты центрирован на своем интервале и, следовательно, охватывает 250 Гц в каждом направлении; например, первый элемент имеет несущую на уровне -4,750 Гц и охватывает интервал от -5000 Гц до -4500 Гц. Фазы кода эквивалентны по модулю 1023, поскольку код ранжирования является периодическим; например, фаза -0,5 эквивалентна фазе 1022,5.
В следующей таблице показаны локальные реплики, которые будут сравниваться с оцифрованным сигналом в этом примере. «•» означает одну локальную реплику, а «...» используется для исключенных локальных реплик:
| Несущая частота. отклонение | Фаза кода (в чипах) | ||||
|---|---|---|---|---|---|
| 0.0 | 0.5 | (больше этапов) | 1,022.0 | 1,022.5 | |
| −4750 Гц | • | • | ... | • | • |
| −4250 Гц | • | • | ... | • | • |
| (более частоты) | ... | ... | ... | ... | ... |
| 4250 Гц | • | • | ... | • | • |
| 4750 Гц | • | • | ... | • | • |
Преобразование Фурье
[ редактировать ]В качестве усовершенствования по сравнению с простым методом корреляции можно более эффективно реализовать вычисление скалярного произведения с помощью преобразования Фурье . Вместо выполнения одного скалярного произведения для каждого элемента декартова произведения кода и частоты, одна операция, включающая БПФ для каждой фазы кода выполняется и охватывающая все частоты; каждая такая операция требует больше вычислительных затрат, но в целом она все же может быть быстрее, чем предыдущий метод, благодаря эффективности алгоритмов БПФ, и она восстанавливает несущую частоту с более высокой точностью, поскольку элементы разрешения по частоте в ДПФ расположены гораздо ближе друг к другу .
В частности, для всех фаз кода в пространстве поиска окно оцифрованного сигнала поэлементно умножается на локальную копию кода (без несущей), а затем обрабатывается дискретным преобразованием Фурье .
Учитывая предыдущий пример, который будет обрабатываться с помощью этого метода, предположим, что данные действительны (в отличие от комплексных данных, которые будут иметь синфазные и квадратурные компоненты), частоту дискретизации 5 МГц, окно сигнала 10 мс и промежуточная частота 2,5 МГц. В цифровом сигнале будет 5 МГц × 10 мс = 50 000 выборок, и, следовательно, 25 001 частотный компонент в диапазоне от 0 Гц до 2,5 МГц с шагом 100 Гц (обратите внимание, что компонент 0 Гц является действительным, поскольку он представляет собой среднее значение реального -значный сигнал и составляющая 2,5 МГц также реальна, поскольку это критическая частота ). Исследуются только компоненты (или элементы разрешения) в пределах 5 кГц от центральной частоты, то есть диапазон от 2,495 МГц до 2,505 МГц, и он покрыт 51 частотным компонентом . имеется 2046 кодовых фаз Как и в предыдущем случае, 51×2046 = 104346 комплексных частотных компонентов , таким образом, всего будет проверено .
Круговая корреляция с преобразованием Фурье
[ редактировать ]Аналогично, в качестве усовершенствования по сравнению с простым методом корреляции можно выполнить одну операцию, охватывающую все фазы кода для каждого элемента разрешения по частоте. Операция, выполняемая для каждого элемента кодовой фазы, включает в себя прямое БПФ, поэлементное умножение в частотной области. обратное БПФ и дополнительную обработку, так что в целом он вычисляет круговую корреляцию вместо круговой свертки . Это дает более точное определение фазы кода , чем простой метод корреляции , в отличие от предыдущего способа, который дает более точное определение несущей частоты, чем предыдущий метод.
Расшифровка сообщений отслеживания и навигации
[ редактировать ]Поскольку полученная несущая частота может меняться из-за доплеровского сдвига, точки, в которых начинаются полученные последовательности PRN, не могут отличаться от O на точное целое число миллисекунд. По этой причине отслеживание несущей частоты вместе с отслеживанием кода PRN используются для определения того, когда начинается код PRN принимаемого спутника. [48] В отличие от более раннего расчета смещения, при котором потенциально могли потребоваться испытания всех 1023 смещений, отслеживание для поддержания захвата обычно требует смещения на половину ширины импульса или меньше. Для выполнения этого отслеживания приемник наблюдает две величины: фазовую ошибку и сдвиг принятой частоты. Корреляция принятого кода PRN по отношению к коду PRN, сгенерированному приемником, вычисляется для определения того, не совмещены ли биты двух сигналов. Сравнение принятого кода PRN с кодом PRN, сгенерированным приемником, сдвинутым на половину ширины импульса раньше и на половину ширины импульса позже, используется для оценки необходимой корректировки. [49] Величина корректировки, необходимая для максимальной корреляции, используется при оценке фазовой ошибки. Полученное смещение частоты от частоты, генерируемой приемником, дает оценку ошибки скорости фазы. Команда для генератора частоты и любой необходимый дополнительный сдвиг кода PRN вычисляются как функция фазовой ошибки и ошибки скорости фазы в соответствии с используемым законом управления. Доплеровская скорость вычисляется как функция смещения частоты от номинальной частоты несущей. Доплеровская скорость — это составляющая скорости вдоль луча зрения приемника относительно спутника.
Поскольку приемник продолжает читать последовательные последовательности PRN, он столкнется с внезапным изменением фазы принятого сигнала PRN длиной 1023 бита. Это указывает на начало бита данных навигационного сообщения. [50] Это позволяет приемнику начать чтение 20-миллисекундных битов навигационного сообщения. Слово TLM в начале каждого подкадра навигационного кадра позволяет приемнику обнаружить начало подкадра и определить время тактового сигнала приемника, в которое начинается навигационный подкадр. Слово КАК затем позволяет получателю определить, какой конкретный подкадр передается. [11] [12] Перед первой оценкой положения может возникнуть задержка до 30 секунд из-за необходимости считывания данных эфемерид перед вычислением пересечений сферических поверхностей.
После того, как подкадр был прочитан и интерпретирован, время отправки следующего подкадра может быть рассчитано с использованием данных коррекции часов и КАК. Приемник знает время часов приемника, когда было получено начало следующего подкадра, из обнаружения слова телеметрии, что позволяет вычислить время прохождения и, следовательно, псевдодальность. Приемник потенциально способен получать новое измерение псевдодальности в начале каждого подкадра или каждые 6 секунд.
Затем данные об орбитальном положении, или эфемериды , из навигационного сообщения используются для точного расчета того, где находился спутник в начале сообщения. Более чувствительный приемник потенциально сможет получить данные эфемерид быстрее, чем менее чувствительный приемник, особенно в шумной среде. [51]
См. также
[ редактировать ]Источники и ссылки
[ редактировать ]Библиография
[ редактировать ]Спецификация GPS-интерфейса
- «Спецификация интерфейса GPS (GPS-IS-200K)» (PDF) . 4 марта 2019 г. (описывает L1, L2C и P).
- «Спецификация интерфейса GPS (GPS-IS-705F)» (PDF) . 4 марта 2019 г. (описывает L5).
- «Спецификация интерфейса GPS (GPS-IS-800E)» (PDF) . 4 марта 2019 г. (описывает L1C).
Примечания
[ редактировать ]- ^ Jump up to: а б с д и ж «Новые гражданские сигналы» . Проверено 18 января 2021 г.
- ^ «Обязательства по бескодовому/полубескодовому доступу к GPS» .
- ^ Гражданские GPS-приемники действительно имеют доступ к частоте L2.
- ^ Jump up to: а б GPS-IS-200 , таблицы 3-Иа, 3-Иб (стр. 6–8).
- ^ GPS-IS-200 , § 3.2.1.3, таблица 3-Iа (п. 4, 7).
- ^ патент США 5576715 , Литтон, Джеймс Д.; Рассел, Грэм и Ву, Ричард К., «Метод и устройство для цифровой обработки в приемнике системы глобального позиционирования», выпущено 19 ноября 1996 г., передано Leica Geosystems.
- ^ Петовелло, Марк (ноябрь 2008 г.). «Ожидаемая продолжительность жизни спутникового альманаха» (PDF) . Внутри ГНСС : 14–19 . Проверено 17 июля 2019 г.
- ^ GPS-IS-200 , § 20.3.4.1 (стр. 63–130).
- ^ GPS-IS-200 , § 6.4.1 (стр. 63–64).
- ^ GPS-IS-200 , § 40.3.3 (стр. 207).
- ^ Jump up to: а б «Введение в пользовательское оборудование NAVSTAR GPS» (PDF) . Правительство США. Архивировано из оригинала (PDF) 21 октября 2013 г. Проверено 24 июля 2013 г. Раздел 1.4.2.6.
- ^ Jump up to: а б «Основы спутниковой навигации» (PDF) . Архивировано из оригинала (PDF) 7 ноября 2014 г.
- ^ GPS-IS-200 , § 6.2.4 (стр. 50), § 3.3.4 (стр. 41).
- ^ GPS-IS-200 , § 20.3.3.1 (стр. 87).
- ^ GPS-IS-200 , § 20.3.3.3.1.1 (стр. 90).
- ^ GPS-IS-200 , § 20.3.4.1 (стр. 130).
- ^ «Спецификация интерфейса IS-GPS-200, редакция D: Пользовательские интерфейсы космического сегмента GPS/навигации Navstar» (PDF) . Офис совместной программы Navstar GPS. Архивировано из оригинала (PDF) 8 сентября 2012 г. Проверено 24 июля 2013 г. Страница 103.
- ^ GPS-IS-200 , § 20.3.3.5.1 (стр. 108–109).
- ^ GPS-IS-200 , § 40.3.3.5.1 (стр. 207–208).
- ^ береговой охраны США . Часто задаваемые вопросы по GPS
- ^ Jump up to: а б «GPS.gov: Новые гражданские сигналы» . www.gps.gov . Проверено 10 июня 2021 г.
 В данную статью включен текст из этого источника, находящегося в свободном доступе .
В данную статью включен текст из этого источника, находящегося в свободном доступе . - ^ GPS-IS-200 , § 30.3.3 (стр. 140).
- ^ Нумерация начинается с 1. Бит 1 — это первый бит сообщения, а бит 300 — последний.
- ^ Счетчик TOW для начала следующего сообщения. Он использует тот же формат, что и усеченный TOW в LNAV .
- ^ GPS-IS-200 , § 30.3.4.1 (стр. 190).
- ^ GPS-IS-200 , § 3.3.3.1.1 (стр. 39) Обратите внимание, что синхронизация описывается в IS в виде эпох X1, которые происходят каждые 1,5 секунды и синхронизируются с началом/концом недели GPS.
- ^ GPS-IS-200 , § 3.3.3.1.1 (стр. 39).
- ^ «Спецификация интерфейса IS-GPS-200, версия D» (PDF) . Береговая охрана США . 7 декабря 2004 г. Проверено 18 июля 2010 г.
- ^ «Упор GPS-антенны» . Проверено 28 июня 2022 г.
- ^ «GPS.gov: Новые гражданские сигналы» . www.gps.gov . Проверено 16 февраля 2024 г.
- ^ «Спутниковая навигация – GPS – Политика – Модернизация» . ФАА.gov . ФАУ. 13 ноября 2014 года . Проверено 25 сентября 2018 г.
- ^ GPS-IS-705 , таблицы 3-Iа, 3-Iб (с. 5 7).
- ^ GPS-IS-705 , § 3.3.2.2 (стр. 14).
- ^ GPS-IS-705 , § 20.3.3 (стр. 41).
- ^ Jump up to: а б GPS-IS-705 , § 3.3.3.1.1 (стр. 39).
- ^ Jump up to: а б GPS-IS-800 , § 3.1 (стр. 2–3).
- ^ GPS-IS-800 , § 3.2.1.6.1 (стр. 4).
- ^ Коды дальности описаны в GPS-IS-800 , § 3.2.2.1.1 (стр. 7–8), с использованием других обозначений.
- ^ Jump up to: а б GPS-IS-800 , таблица 3.2-2 (стр. 10–12).
- ^ GPS-IS-800 , с. 7.
- ^ GPS-IS-800 , § 3.2.2.1 (стр. 6).
- ^ GPS-IS-800 , § 6.3.1.2 (стр. 110–111).
- ^ GPS-IS-800 , § 3.5.5.1 (стр. 69).
- ^ GPS-IS-800 , § 3.2.3.2 (стр. 19–20).
- ^ GPS-IS-800 , § 3.2.3.1 (стр. 18).
- ^ Пенттинен, Юрки Т.Дж. (16 марта 2015 г.). Справочник по телекоммуникациям: Инженерные рекомендации для фиксированных, мобильных и спутниковых систем . Джон Уайли и сыновья. ISBN 9781119944881 .
- ^ Как работает GPS. Конова.де (2005).
- ^ «Как GPS-приемник получает блокировку» . Gpsinformation.net . Проверено 13 октября 2009 г.
- ^ «Введение в пользовательское оборудование NAVSTAR GPS» (PDF) . Правительство США. Архивировано из оригинала (PDF) 21 октября 2013 г. Проверено 24 июля 2013 г. Раздел 1.4.2.4.
- ^ «Введение в пользовательское оборудование NAVSTAR GPS» (PDF) . Правительство США. Архивировано из оригинала (PDF) 21 октября 2013 г. Проверено 24 июля 2013 г. Раздел 1.4.2.5.
- ^ «AN02 Сетевая помощь» . Архивировано из оригинала 21 февраля 2010 г. Проверено 10 сентября 2007 г.