Механизм (инжиниринг)
Эта статья нуждается в дополнительных цитатах для проверки . ( февраль 2021 г. ) |

В технике механизм устройство — это , которое преобразует входные силы и движение в желаемый набор выходных сил и движения. Механизмы обычно состоят из движущихся компонентов, которые могут включать в себя шестерни и зубчатые передачи ; Ремни и цепные передачи ; камеры и подписчики ; Связи ; Фрикционные устройства, такие как тормоза или сцепления ; Структурные компоненты, такие как рама, крепеж, подшипники, пружины или смазочные материалы; Различные элементы машины , такие как шлицы, штифты или шпонки.
Немецкий учёный Франц Рело определяет машину как «сочетание сопротивляющихся тел, устроенных таким образом, что с их помощью механические силы природы можно заставить совершать работу, сопровождаемую определённым определенным движением». В этом контексте его использование машины обычно интерпретируется как механизм .
Комбинация силы и движения определяет мощность , а механизм управляет силой для достижения желаемого набора сил и движения.
Механизм обычно представляет собой часть более крупного процесса, известного как механическая система или машина . Иногда всю машину можно назвать механизмом; примерами являются рулевой механизм автомобиля или заводной механизм наручных часов . Однако обычно совокупность нескольких механизмов называют машиной.
Кинематические пары
[ редактировать ]Со времен Архимеда до эпохи Возрождения механизмы рассматривались как состоящие из простых машин , таких как рычаг , шкив , винт , колесо и ось , клин и наклонная плоскость . Рело сосредоточился на телах, называемых связями , и связях между этими телами, называемых кинематическими парами или суставами.
Чтобы использовать геометрию для изучения движения механизма, его звенья моделируются как твердые тела . Это означает, что предполагается, что расстояния между точками в звене не меняются при движении механизма, то есть звено не изгибается. Таким образом, относительное перемещение между точками в двух связанных звеньях считается результатом соединяющей их кинематической пары.
Считается, что кинематические пары или соединения обеспечивают идеальные ограничения между двумя звеньями, такие как ограничение одной точки для чистого вращения или ограничение линии для чистого скольжения, а также чистое качение без проскальзывания и точечный контакт со скольжением. . Механизм моделируется как совокупность жестких звеньев и кинематических пар.
Ссылки и суставы
[ редактировать ]
Рело назвал идеальные связи между звеньями кинематическими парами . Он различал высшие пары с линейным контактом между двумя звеньями и низшие пары с площадным контактом между звеньями. Дж. Филлипс [ нужны разъяснения ] показывает, что существует множество способов построения пар, которые не соответствуют этой простой модели.
Нижняя пара: Нижняя пара представляет собой идеальное соединение, имеющее поверхностный контакт между парой элементов, как в следующих случаях:
- Вращающаяся пара, или шарнирное соединение, требует, чтобы линия в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, перпендикулярная этой линии в движущемся теле, должна поддерживать контакт с аналогичной перпендикулярной плоскостью в неподвижном теле. тело. Это накладывает пять ограничений на относительное перемещение звеньев, что дает паре одну степень свободы.
- Призматическое соединение , или ползун, требует, чтобы линия в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, параллельная этой линии в движущемся теле, должна поддерживать контакт с аналогичной параллельной плоскостью в неподвижном теле. . Это накладывает пять ограничений на относительное перемещение звеньев, что дает паре одну степень свободы.
- Цилиндрическое соединение требует, чтобы линия в движущемся теле оставалась коллинеарной с линией в неподвижном теле. Он сочетает в себе вращающееся соединение и скользящее соединение. Этот сустав имеет две степени свободы.
- Сферический шарнир или шаровой шарнир требует, чтобы точка движущегося тела поддерживала контакт с точкой неподвижного тела. Этот сустав имеет три степени свободы.
- Плоское соединение требует, чтобы плоскость движущегося тела поддерживала контакт с плоскостью неподвижного тела. Этот сустав имеет три степени свободы.
- Винтовое соединение или винтовое соединение имеет только одну степень свободы, поскольку скользящие и вращательные движения связаны углом спирали резьбы.
Высшие пары: Как правило, высшая пара представляет собой ограничение, требующее линейного или точечного контакта между поверхностями элементов. Например, контакт между кулачком и его толкателем представляет собой высшую пару, называемую кулачковым соединением . Аналогичным образом, контакт между эвольвентными кривыми, образующими зацепляющиеся зубья двух шестерен, представляет собой кулачковые соединения.
Кинематическая схема
[ редактировать ]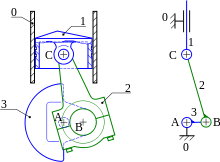
Кинематическая диаграмма сводит компоненты машины к скелетной диаграмме, в которой особое внимание уделяется соединениям, а звенья сводятся к простым геометрическим элементам. Эту диаграмму можно также сформулировать в виде графа , представляя звенья механизма в виде ребер, а соединения — в виде вершин графа. Этот вариант кинематической схемы зарекомендовал себя эффективным при перечислении кинематических структур в процессе проектирования машин. [1]
Важным фактором в этом процессе проектирования является степень свободы системы связей и соединений, которая определяется с помощью критерия Чебычева-Грюблера-Куцбаха .
Плоские механизмы
[ редактировать ]
Хотя все механизмы в механической системе являются трехмерными, их можно анализировать с использованием плоской геометрии, если движение отдельных компонентов ограничено так, что траектории всех точек параллельны или последовательно соединены с плоскостью. В этом случае система называется планарным механизмом . Кинематический анализ плоских механизмов использует подмножество специальной евклидовой группы SE , состоящее из плоских вращений и трансляций, обозначаемых SE.
Группа SE трехмерна, а это означает, что каждое положение тела в плоскости определяется тремя параметрами. Параметрами часто являются координаты x и y начала системы координат в M , [ нужны разъяснения ] измеренный от начала системы координат в F и угол, измеренный от оси x в F до оси x в M . [ нужны разъяснения ] Об этом часто говорят, что тело на плоскости имеет три степени свободы .
Чистое вращение шарнира и линейное перемещение ползуна можно отождествить с подгруппами SE и определить два шарнира как шарниры с одной степенью свободы плоских механизмов. [ непонятно ] Кулачковое соединение, образованное двумя поверхностями, находящимися в контакте скольжения и вращения, представляет собой соединение с двумя степенями свободы.
Сферические механизмы
[ редактировать ]
Можно построить механизм, в котором траектории точек во всех компонентах лежат в концентрических сферических оболочках вокруг неподвижной точки. Примером может служить подвесной гироскоп . Эти устройства называются сферическими механизмами. [2] Сферические механизмы устроены путем соединения звеньев шарнирными соединениями так, что оси каждого шарнира проходят через одну и ту же точку. Эта точка становится центром концентрических сферических оболочек. Движение этих механизмов характеризуется группой SO(3) [ нужны разъяснения ] вращений в трехмерном пространстве. Другими примерами сферических механизмов являются автомобильный дифференциал и роботизированное запястье.
Группа вращения SO(3) трехмерна. Примером трех параметров, определяющих пространственное вращение, являются углы крена, тангажа и рыскания, используемые для определения ориентации самолета.
Пространственные механизмы
[ редактировать ]
Механизм, в котором тело движется посредством общего пространственного движения, называется пространственным механизмом . Примером может служить рычажный механизм RSSR, который можно рассматривать как четырехзвенный рычажный механизм, в котором шарнирные соединения соединительного звена заменены концами стержней , также называемыми сферическими шарнирами или шаровыми шарнирами . Концы стержней позволяют входному и выходному кривошипам рычажного механизма РССР смещаться до такой степени, что они лежат в разных плоскостях, что приводит к перемещению звена сцепки в общем пространственном движении. Роботы-манипуляторы , платформы Стюарта и гуманоидные роботизированные системы также являются примерами пространственных механизмов.
Рычаг Беннета является примером пространственного сверхограниченного механизма , который состоит из четырех шарнирных соединений.
Группа SE(3) [ нужны разъяснения ] шестимерна, что означает, что положение тела в пространстве определяется шестью параметрами. Три параметра определяют начало координат движущейся системы отсчета относительно фиксированной системы координат. Три других параметра определяют ориентацию движущейся рамки относительно неподвижной.
Связи
[ редактировать ]
Связь . – это совокупность звеньев, соединенных суставами Как правило, звенья являются структурными элементами, а суставы допускают движение. Пожалуй, самым полезным примером является плоское четырехзвенное соединение . Однако существует еще много особых связей:
- Рычаг Уатта представляет собой четырехзвенную связь, образующую приблизительную прямую линию. Это имело решающее значение для работы его конструкции парового двигателя. Эта связь также присутствует в подвесках транспортных средств, чтобы предотвратить перемещение кузова из стороны в сторону относительно колес.
- Успех связи Уатта привел к созданию подобных приблизительных прямолинейных связей, таких как связь Хукена и связь Чебышева .
- Рычаг Поселье генерирует настоящий прямолинейный выходной сигнал из вращающегося входного сигнала.
- Связь Сарруса — это пространственная связь, которая генерирует прямолинейное движение от вращательного воздействия.
- Рычаг Клана и рычаг Янсена — недавние изобретения, обеспечивающие интересные движения при ходьбе. Это соответственно шестизвенная и восьмизвенная рычажная система.
Совместимые механизмы
[ редактировать ]– Податливый механизм это совокупность твердых тел, соединенных податливыми элементами. Эти механизмы имеют множество преимуществ, в том числе уменьшенное количество деталей, уменьшенный «развал» между соединениями (отсутствие паразитного движения из-за зазоров между деталями). [3] ), накопление энергии, низкие эксплуатационные расходы (они не требуют смазки и имеют низкий механический износ) и простоту изготовления. [4]
Подшипники изгиба (также известные как шарниры изгиба ) представляют собой подмножество податливых механизмов, которые производят геометрически четкое движение (вращение) при приложении силы.
Кулачковые и следящие механизмы
[ редактировать ]
Кулачково - ведомый механизм образуется в результате прямого контакта двух звеньев специальной формы. Ведущее звено называется кулачком, а звено, которое приводится в движение за счет прямого контакта их поверхностей, называется ведомым. Форма соприкасающихся поверхностей кулачка и толкателя определяет движение механизма. В общем, энергия механизма кулачка и толкателя передается от кулачка к толкателю. вращается Распределительный вал и в соответствии с профилем кулачка толкатель перемещается вверх и вниз. В настоящее время также доступны несколько другие типы эксцентриковых толкателей, в которых энергия передается от толкателя на кулачок. Основное преимущество этого типа кулачкового и ведомого механизма заключается в том, что ведомый механизм слегка перемещается и помогает вращать кулачок в шесть раз больше длины окружности с 70% усилия.
Шестерни и зубчатые передачи
[ редактировать ]
Передачу вращения между соприкасающимися зубчатыми колесами можно проследить до антикиферского механизма в Греции и колесницы, указывающей на юг в Китае. На иллюстрациях эпохи Возрождения ученого Георгия Агриколы изображены зубчатые передачи с цилиндрическими зубьями. Внедрение эвольвентного зуба позволило получить стандартную конструкцию шестерни, обеспечивающую постоянное передаточное число. Некоторые важные особенности зубчатых передач и зубчатых передач:
- Соотношение делительных кругов сопряженных шестерен определяет передаточное число и механическое преимущество зубчатого ряда.
- Планетарная зубчатая передача обеспечивает высокое передаточное число в компактном корпусе.
- Можно спроектировать зубья шестерен некруглой формы , но при этом плавно передавать крутящий момент.
- Передаточные числа цепных и ременных передач рассчитываются так же, как и передаточные числа .
Синтез механизмов
[ редактировать ]Проектирование механизмов для достижения определенного движения и передачи силы известно как кинематический синтез механизмов . [5] Это набор геометрических методов, которые определяют размеры рычажных механизмов, кулачковых и ведомых механизмов, а также шестерен и зубчатых передач для выполнения необходимого механического движения и передачи мощности. [6]
См. также
[ редактировать ]- Зубчатая передача
- Соединение (механическое)
- Машина (механическая)
- Механическая система
- Механические часы
- Схема машин
- Виртуальная работа
- механизм Хобермана
- Движущиеся части
Ссылки
[ редактировать ]- ^ Лунг-Вэнь Цай, 2001, Конструкция механизма: перечисление кинематических структур в зависимости от функции. Архивировано 6 апреля 2023 г. в Wayback Machine , CRC Press.
- ^ Маккарти, Дж. Майкл; Со, Гим Сон (11 ноября 2010 г.). Геометрическое проектирование связей . Springer Science & Business Media. ISBN 978-1-4419-7892-9 . Архивировано из оригинала 6 апреля 2023 года . Проверено 15 марта 2023 г. - через Google Книги.
- ^ Нигату, Хассен; Йихун, Йимескер (2020), Ларошель, Пьер; Маккарти, Дж. Майкл (ред.), «Алгебраический взгляд на сопутствующее движение ПКМ 3RPS и 3PRS» (PDF) , Материалы симпозиума USCToMM 2020 года по механическим системам и робототехнике , том. 83, Чам: Springer International Publishing, стр. 242–252, номер документа : 10.1007/978-3-030-43929-3_22 , ISBN. 978-3-030-43928-6 , S2CID 218789290 , заархивировано (PDF) из оригинала 28 мая 2022 г. , получено 14 декабря 2020 г.
- ^ «Механизмы совместимости | О механизмах совместимости» . совместимые механизмы . Архивировано из оригинала 22 января 2021 года . Проверено 8 февраля 2019 г.
- ^ Хартенберг, Р.С. и Дж. Денавит (1964) Кинематический синтез связей. Архивировано 24 января 2021 года в Wayback Machine , Нью-Йорк: McGraw-Hill — онлайн-ссылка из Корнельского университета .
- ^ Дж. Дж. Уикер, Г. Р. Пеннок и Дж. Э. Шигли, Теория машин и механизмов, пятое изд., Архивировано 19 мая 2022 г. в Wayback Machine Oxford University Press, 2016.
Внешние ссылки
[ редактировать ]- Сбалансированный шарнирно-рычажный механизм.
- Машины и механизмы вики
- Цифровая библиотека кинематических моделей для проектирования (KMODDL): коллекции фильмов и фотографий сотен моделей механизмов.
- Шестизвенная прямая связь из коллекции моделей Рело Корнельского университета.
- Анимации различных механизмов
- Пример шестиполосного функционального генератора, который вычисляет угол для заданного диапазона
- Разнообразие анимации связей
- Разнообразие конструкций шестизвенных рычагов
- Анимация сферического развертывающегося механизма
| Базы данных органов управления : Национальные |
|---|