Мастичный электродвигатель DC
Электродвигатель с матовым постоянным током с внутренним коммутацией представляет собой электродвигатель , предназначенный для работы с источником питания постоянного тока , и использует электрическую щетку для контакта .
Матовые двигатели были первым коммерчески важным применением электроэнергии к вождению механической энергии, а системы распределения постоянного тока использовались более 100 лет для эксплуатации двигателей в коммерческих и промышленных зданиях. Матовые двигатели постоянного тока могут варьироваться по скорости, изменяя рабочее напряжение или прочность магнитного поля. В зависимости от соединений поля с источником питания, характеристики скорости и крутящего момента могут быть изменены, чтобы обеспечить стабильную скорость или скорость, обратно пропорциональную механической нагрузке. Матовые двигатели продолжают использоваться для электрического движения, кранов, бумажных машин и стальных катящихся мельниц. Поскольку щетки изнашиваются и требуют замены, бесщеточные двигатели постоянного тока с использованием электронных устройств Power Electronic имеют смещенные щетки из многих применений.
Простой двухполюсный двигатель DC
[ редактировать ]Следующая графика иллюстрирует простой двухполюсный, матовой мотор DC.


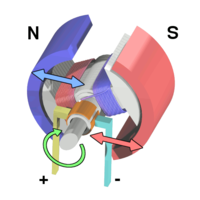


Когда ток проходит через катушку, намотанную вокруг ядра мягкого железа, расположенного внутри внешнего магнитного поля, сторона положительного полюса действует вверх силой, а другая сторона действует вниз силой. Согласно правлению левой руки Флеминга , силы вызывают поворот на катушку, заставляя ее вращаться. Чтобы двигатель вращался в постоянном направлении, коммутаторы «постоянный ток» делают ток обратным направлением в направлении каждую половину цикла (в двигателе с двумя полюсами), что приводит к тому, что двигатель продолжает вращаться в одном направлении.
Проблема с двигателем, показанным выше, заключается в том, что, когда плоскость катушки параллельна магнитному полю - IE, когда полюсы ротора находятся в 90 градусов от полюсов статора - крутящий момент равен нулю. На картинках выше это происходит, когда ядро катушки горизонталь-положением, которое она будет достигнут на втором-поступившем изображении справа. Мотор не сможет начать в этой позиции. Однако, как только он был запущен, он продолжит вращаться через эту позицию по моменту.
Есть вторая проблема с этим простым дизайном полюса. В положении с нулевым кругом обе щетки коммутатора касаются (соединяющих) обе пластины коммутатора, что приводит к короткому замыканию. Ведущие мощности перекрываются через пластины коммутатора, а катушка также коротко закручивается через обе щетки (катушка закорачивается дважды, один раз через каждую кисть независимо). Обратите внимание, что эта проблема не зависит от несчастливой проблемы выше; Даже если бы в катушке был высокий ток в этой позиции, все равно будет нулевой крутящий момент. Проблема здесь заключается в том, что этот короткий бесполезный потребляет мощность без какого-либо движения (даже какого-либо тока катушки.) В демонстрации с низким содержанием батареи, проведенной на батарейке, эта короткая циркация, как правило, не считается вредной. Однако, если бы двигатель с двумя полюсами был разработан, чтобы выполнить фактическую работу с несколькими сотнями Вт мощности, это оборотень может привести к серьезному перегреву коммутатора, повреждению щетки и потенциальной сварке кистей-если они были металлическими-коммутатору. Углеродные щетки, которые часто используются, не будут сварены. В любом случае, короткометражный фильм очень расточительен, быстро осушает батареи и, как минимум, требует, чтобы компоненты питания были разработаны в соответствии с гораздо более высокими стандартами, чем потребовалось бы, чтобы просто запустить двигатель без шорты.

Одним из простых решений является разрыв между тарелками коммутатора, который шире, чем концы кистей. Это увеличивает диапазон нулевых угловых положений, но устраняет проблему короткого замыкания; Если двигатель начинает вращаться от внешней силы, он продолжит вращаться. С помощью этой модификации его также можно эффективно отключить, просто остановив (остановку) его в положении в диапазоне углах с нулевым перекрытием (т.е. неконтактным) углом. Этот дизайн иногда можно увидеть в домашних хобби -моторах, например, для научных ярмарок, и такие дизайны можно найти в некоторых опубликованных книгах по научным проектам. Чистым недостатком этого простого решения является то, что двигатель теперь проходит через существенную дугу вращения дважды за революцию, а крутящий момент пульсируется. Это может работать для электрических вентиляторов или для поддержания вращения маховика, но есть много применений, даже если запуск и остановка не требуются, для которых он совершенно неадекватный, например, управление капстаном транспорта ленты или любой подобный экземпляр, где Ускоряйте и часто замедляется и быстро - это требование. Еще один недостаток заключается в том, что, поскольку катушки имеют меру себя Индуктивность , ток, текущий в них, не может внезапно остановиться. Текущий пытается пережить разрыв в открытии между сегментом коммутатора и кистью, вызывая армирование.
Даже для фанатов и маховиков, явные слабости, оставшиеся в этом дизайне, особенно то, что он не является самостоятельным началом от всех позиций,-это невозможно для рабочего использования, особенно учитывая лучшие альтернативы, которые существуют. В отличие от демонстрационного двигателя выше, двигатели постоянного тока обычно разработаны с более чем двумя полюсами, способны начинаться с любого положения и не имеют никакой позиции, где ток может течь, не производя электроэнергию, проходя через какую -то катушку. Многие общие небольшие мотоцикуальные двигатели постоянного тока, используемые в игрушках и небольших потребительских приборах, самые простые массовые двигатели постоянного тока, которые можно найти, имеют трехполюсные арматуры. Теперь кисти могут соединить два смежных сегмента коммутатора, не вызывая короткий замыкание. Эти три полюсные арматуры также имеют то преимущество, что ток от кистей либо течет через две катушки последовательно, либо только через одну катушку. Начиная с тока в отдельной катушке в половине его номинального значения (в результате прохождения двух катушек последовательно), она поднимается до номинального значения, а затем падает до половины этого значения. Затем последовательность продолжается с током в обратном направлении. Это приводит к более близкому пошаговому приближению к идеальному току синусоидальной катушки, создавая более ровный крутящий момент, чем двигатель с двумя полюсами, где ток в каждой катушке ближе к квадратной волне. Поскольку текущие изменения вдвое меньше сопоставимого двухполюсного двигателя, следовательно, армирование на кистях меньше.
Если вал двигателя постоянного тока повернут внешней силой, двигатель будет действовать как генератор и производить электродвижущую силу (EMF). Во время нормальной работы вращение двигателя дает напряжение, известное как противодействие EMF (CEMF) или заднее ЭДС, потому что оно противодействует приложенному напряжению на двигателе. Задняя ЭДС является причиной того, что двигатель при свободном беге, по-видимому, не обладает таким же низким электрическим сопротивлением, как провод, содержащий в его обмотке. Это тот же ЭМС, который производится, когда двигатель используется в качестве генератора (например, когда электрическая нагрузка, такая как лампочка, помещается на клеммы двигателя, а вал двигателя приводится в движение с помощью внешнего крутящего момента). Следовательно, общее падение напряжения на двигателе состоит из падения напряжения CEMF и падения паразитического напряжения в результате внутреннего сопротивления обмотков арматуры. Ток через двигатель определяется следующим уравнением:

Механическая мощность, полученная двигателем, дается:

В качестве разгруженного двигателя постоянного тока он генерирует обратную электродвижущую силу, которая противостоит току, применяемому на двигатель. Ток через двигатель падает по мере увеличения скорости вращения, а свободный круговой двигатель имеет очень мало тока. Только когда на двигатель применяется нагрузка, замедляет ротор, то ток протягивает через двигатель увеличивается.
Поездка на самолет
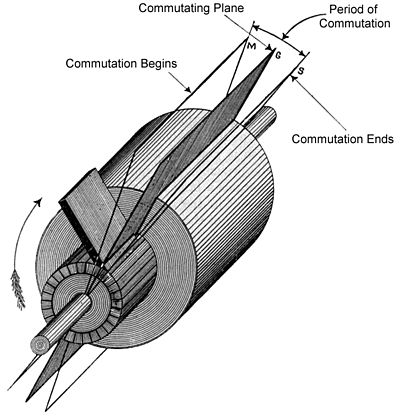
[ редактировать ]В динамо плоскость через центры областей контакта, где пара кистей касается коммутатора и параллельно оси вращения арматуры, называется коммутационной плоскостью . На этой диаграмме отображается только для одной из кистей, предполагая, что другая щетка установила контакт на другой стороне коммутатора с радиальной симметрией, в 180 градусах от показанной щетки.
|
Компенсация за искажение поля статора
[ редактировать ]В настоящем динамо поле никогда не бывает совершенно равномерным. Вместо этого, когда ротор вращается, он вызывает эффекты поля, которые перетаскивают и искажают магнитные линии внешнего некалирующего статора.
 |
 |
Чем быстрее вращается ротор, тем дальше степень искажения поля. Поскольку динамо работает наиболее эффективно с полем ротора под прямым углом к полю статора, необходимо либо замедлить, либо продвигать положение щетки, чтобы поместить поле ротора в правильное положение, чтобы быть под прямым углом к искаженному поле.
 |
 |
Эти полевые эффекты изменяются, когда направление вращения перевернуто. Поэтому трудно построить эффективную обратимую динамо, связанную с поставкой, поскольку для наивысшей силы поля необходимо перемещать кисти в противоположную сторону нормальной нейтральной плоскости.
Эффект можно считать несколько похожим на продвижение времени в двигателе внутреннего сгорания. Как правило, динамо, которое было разработано для работы с определенной фиксированной скоростью, будет иметь свои кисти, постоянно закрепленные, чтобы выровнять поле для самой высокой эффективности на этой скорости. [ 1 ]
Машины постоянного тока со статорами раны компенсируют искажение обмотками поля и обмотки компенсации .
Вариации моторного дизайна
[ редактировать ]DC Motors
[ редактировать ]Матовые двигатели постоянного тока построены с раневыми роторами и статорами для раны или постоянного магнита.
Статоры раны
[ редактировать ]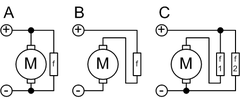
- А, шунт
- B, серия
- С, соединение
- F, полевая катушка
Полевые катушки традиционно существовали в четырех основных форматах: отдельно взволнованы (SEPEX), серия -Wound, Shunt -Wound и комбинация последних двух; сложный слой.
В серии наращенных мотор , полевые катушки соединены электрически последовательно с катушками якоря (через щетки). В шунтируемом моторном ране полевые катушки соединены параллельно или «шунтируются» к катушкам арматуры. В отдельно возбужденной (SEPEX) двигателе полевые катушки поставляются из независимого источника, такого как генератор двигателя , а ток поля не зависит от изменений тока якоря. Система SEPEX иногда использовалась в двигателях DC Traction Motors , чтобы облегчить контроль над WheelsLip .
Постоянные моторные двигатели
[ редактировать ]Типы постоянного магнита имеют некоторые преимущества производительности по сравнению с прямыми точные, возбужденные, синхронные типы и стали преобладающими в приложениях дробных лошадиных сил. Они меньше, легче, более эффективны и надежны, чем другие отдельные электрические машины . [ 2 ]
Первоначально все крупные промышленные двигатели постоянного тока использовали магниты для раневого поля или ротор. Постоянные магниты традиционно были полезны только для небольших двигателей, потому что было трудно найти материал, способный сохранить высокопрочное поле. Только недавно достигают успеха в технологии материалов позволили создать высокоинтенсивные постоянные магниты, такие как неодимные магниты , что позволяет развивать компактные, мощные двигатели без дополнительного объема полевых катушек и средств возбуждения. Но по мере того, как эти высокопроизводительные постоянные магниты становятся более примененными в электродвигательном или генераторном системе, реализуются другие проблемы (см. Синхронный генератор с постоянными магнитами ).
Осевые полевые двигатели
[ редактировать ]Традиционно поле было применено радиально - в и вдали от оси вращения двигателя. Однако в некоторых конструкциях есть поле, протекающее вдоль оси двигателя, при этом ротор режут линии поля, когда оно вращается. Это обеспечивает гораздо более сильные магнитные поля, особенно если массивы Halbach используются . Это, в свою очередь, дает питание двигателю на более низких скоростях. Тем не менее, сфокусированная плотность потока не может подняться при ограниченной плотности остаточного потока постоянного магнита, несмотря на высокую коэрцитивность и, как и все электрические машины, плотность потока насыщения магнитного ядра является дизайнерским ограничением.
Управление скоростью
[ редактировать ]Как правило, скорость вращения двигателя постоянного тока пропорциональна ЭДС в его катушке (= напряжение, приложенное к нему минус напряжение при его сопротивлении), а крутящий момент пропорционален току. Управление скоростью может быть достигнуто с помощью переменных аккумуляторов, напряжения переменного питания, резисторов или электронных управлений. Пример моделирования можно найти здесь [ 3 ] и. [ 4 ] Направление двигателя постоянного тока набола может быть изменено путем обращения либо поля, либо якоря, но не обоих. Это обычно делается со специальным набором контакторов (контакторов направления). Эффективное напряжение может варьироваться путем вставки серийного резистора или электронного переключающего устройства из тиристоров , транзисторов или, ранее, ртутных дуговых выпрямителей . [ 5 ]
Серия-параллель
[ редактировать ]Серийный параллельный контроль был стандартным методом управления железнодорожными тяговыми двигателями перед появлением электроники . Электрический локомотив или поезд, как правило, будет иметь четыре двигателя, которые могут быть сгруппированы тремя различными способами:
- Все четыре серии (каждый двигатель получает четверть напряжения линии), самая низкая скорость
- Две параллельные группы по две серии (каждый двигатель получает половину линейного напряжения)
- Все четыре параллельно (каждый двигатель получает полное напряжение линии), самая высокая скорость
Это обеспечило три скорости бега с минимальными потери сопротивления. Для запуска и ускорения дополнительный контроль был обеспечен сопротивлением. Эта система была заменена электронными системами управления.
Полевая ослабление
[ редактировать ]Скорость двигателя постоянного тока может быть увеличена за счет ослабления поля. Уменьшение силы поля осуществляется путем вставки сопротивления последовательно с шунтированным полем или вставки сопротивления вокруг обмотки поля, подключенного к серии, чтобы уменьшить ток в обмотке поля. Когда поле ослаблена, обратный EMF уменьшается, поэтому более крупный ток протекает через обмотку арматуры, и это увеличивает скорость. Освобождение поля используется не самостоятельно, а в сочетании с другими методами, такими как последовательный контроль.
Топпер
[ редактировать ]В схеме, известной как вертолет , среднее напряжение, приложенное к двигателю, варьируется путем очень быстрого переключения напряжения питания. Поскольку отношение «on» к «выключению» варьируется для изменения среднего приложенного напряжения, скорость двигателя варьируется. Процент «на» времени, умноженного на напряжение питания, дает среднее напряжение, приложенное к двигателю. Следовательно, с поставкой 100 В и 25% «Время» среднее напряжение на двигателе будет 25 В. В «Время отключения» индуктивность арматуры приводит к продолжению тока через диод, который называется «диод обработки. "Параллельно с двигателем. На этом этапе цикла ток снабжения будет нулевым, и, следовательно, средний ток двигателя всегда будет выше, чем ток снабжения, если процент »в« Время составляет 100%. При 100% «В время», ток снабжения и двигателя равны. Быстрое переключение тратит меньше энергии, чем серии резисторов. Этот метод также называется модуляцией ширины импульса (ШИМ) и часто контролируется микропроцессором. Вывод фильтр Иногда устанавливается для сглаживания среднего напряжения, приложенного к двигателю, и уменьшения шума двигателя.
Поскольку серийный двигатель DC DC развивает самый высокий крутящий момент на низкой скорости, его часто используются в тяговых приложениях, таких как электрические локомотивы и трамваи . Другое приложение - стартовые двигатели для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может сбой (например, ремни). По мере того, как двигатель ускоряется, ток арматуры (и, следовательно, поля) уменьшается. Снижение поля приводит к ускорению двигателя, а в крайних случаях двигатель может даже разрушить себя, хотя это гораздо менее проблема в двигателях с фанатами (с самостоятельными вентиляторами). Это может быть проблемой с железнодорожными двигателями в случае потери адгезии, так как, если они не подведены под контроль, двигатели могут достигать скорости намного выше, чем при нормальных обстоятельствах. Это может не только вызвать проблемы для самих двигателей и передач, но и из -за дифференциальной скорости между рельсами и колесами, это также может нанести серьезный ущерб рельсам и колесам колеса, когда они быстро нагреваются и охлаждают. Ослабление поля используется в некоторых электронных управлениях для увеличения максимальной скорости электромобиля. Самая простая форма использует контактор и резистор с полетом поля; Электронный управление контролирует ток двигателя и переключает резистор ослабления поля в схему, когда ток двигателя уменьшается ниже заданного значения (это будет, когда двигатель будет на полной скорости конструкции). Как только резистор находится в цепи, двигатель увеличит скорость выше нормальной скорости при номинальном напряжении. Когда ток двигателя увеличивается, управление отключит резистор, а низкоскоростный крутящий момент доступен.
Уорд Леонард
[ редактировать ]Управление Уорда Леонарда обычно используется для управления двигателем DC Shunt или Compound Rate Rate и разработано в качестве метода обеспечения двигателя с контролем скорости от снабжения переменного тока, хотя он не оборудован без преимуществ в схемах постоянного тока. Поставка переменного тока используется для управления двигателем переменного тока, обычно индукционный двигатель, который управляет генератором DC или динамо . Выход постоянного тока из арматуры напрямую связан с якорой двигателя постоянного тока (иногда, но не всегда идентичной конструкции). Обмотки обмотчиков обоих машин постоянного тока независимо возбуждаются с помощью переменных резисторов. Чрезвычайно хороший контроль скорости от постоянной до полной скорости и последовательный крутящий момент может быть получен путем изменения генератора и/или тока поля двигателя. Этот метод контроля был фактическим методом из его разработки до тех пор, пока он не был заменен твердыми тиристорными системами. Он обнаружил обслуживание практически в любой среде, где требовался хороший контроль скорости, от пассажирских подъемников до крупных шахтных головных веществ и даже промышленного процесса и электрических кранов. Его основным недостатком было то, что для реализации схемы необходимы три машины (пять в очень больших установках, поскольку машины постоянного тока часто были продублированы и контролировались с помощью тандемного переменного резистора). Во многих приложениях набор генератора двигателя часто оставался постоянно, чтобы избежать задержек, которые в противном случае были бы вызваны при запуске его по мере необходимости. Хотя электронные (тиристорские) контроллеры заменили большинство систем с небольшим и средним приходами, некоторые очень большие (тысячи лошадиных сил) остаются в эксплуатации. Полевые токи намного ниже, чем токи якоря, что позволяет тиристорскому блоку умеренного размера управлять гораздо большим двигателем, чем он может управлять напрямую. Например, в одной установке тиристорский блок 300 ампер управляет полем генератора. Выходной ток генератора превышает 15 000 ампер, что было бы чрезвычайно дорогим (и неэффективным) для контроля непосредственно с тиристорами.
Крутящий момент и скорость двигателя постоянного тока
[ редактировать ]постоянного двигателя отдельно возбужденного Скорость и характеристики крутящего момента варьируются в зависимости от трех различных источников намагниченности, поля, самостоятельного поля или постоянного поля, которые используются избирательно для управления двигателем над диапазоном механической нагрузки. Самосеянные полевые двигатели могут быть последовательными, шунтами или составной раной, подключенной к арматуре.
Основные свойства
[ редактировать ]Определять
- E b , контрэлектромозная сила ( V )
- Я а ток арматуры ( ) ,
- K B , константа уравнения встречного ЭМФ
- K n , постоянная уравнения скорости
- K T , Уравнение крутящего момента
- n , частота арматуры ( оборотная часть )
- R m , моторное сопротивление ( ω )
- T , моторный крутящий момент ( нм )
- V m , входное напряжение двигателя (V)
- F машины , общий поток ( WB )
- Коэффициент Картера ( K C ) является параметром, который часто используется в качестве способа оценки эффективного шага слота в арматуре двигателя с открытыми (или полузащиленными) слотами. [ 6 ]
Уравнение встречного ЭМФ
[ редактировать ]Счетчик двигателя постоянного тока пропорциональна продукту общей прочности потока и якоря машины:
- E b = k b φ n [ 7 ]
Уравнение баланса напряжения
[ редактировать ]Входное напряжение двигателя постоянного тока должно преодолеть противораковую ЭДС, а также падение напряжения, создаваемое током якоря через сопротивление двигателя, то есть комбинированное сопротивление по кистям, обмотка якоря и последовательность поля, если таковые имеются:
Уравнение крутящего момента
[ редактировать ]Крутящий момент двигателя постоянного тока пропорционален продукту тока арматуры и общей прочности потока машины: [ 10 ] [ 11 ] [ 12 ]

где
- K T = k b / 2π
Уравнение скорости
[ редактировать ]С
- n = e b / k b φ и
- V m m = e b + r m i a
у нас есть [ 13 ] [ 14 ] [ 15 ]

где
- k n = 1 / k b
Характеристики крутящего момента и скорости
[ редактировать ]Шунтерный мотор
[ редактировать ]с высокой резистенцией с высокой устойчивостью шунтирования С обмоткой , соединенной параллельно с арматурой, V M , R M и Ø постоянны, так что регулирование NO нагрузки на полную скорость нагрузки редко составляет более 5%. [ 16 ] Управление скоростью достигается тремя способами: [ 17 ]
- Изменение полевого напряжения
- Полевая ослабление
- Переменное сопротивление в цепи полевой цепи.
Сериал раненый мотор
[ редактировать ]Серийный двигатель реагирует на увеличение нагрузки, замедляясь; Ток увеличивается, и крутящий момент увеличивается пропорционально квадрату тока, поскольку один и тот же ток течет как в якоре, так и на обмотках. Если двигатель остановился, ток ограничен только общим сопротивлением обмоток, и крутящий момент может быть очень высоким, но существует опасность того, что обмотки станут перегретыми. Серии раневых двигателей широко использовались в качестве тяги в железнодорожном транспорте [ 18 ] из всех, но выводится в пользу силовым инвертором переменного тока, связанного с моторов индукции . Счетчик ЭМФ помогает сопротивлению якоря ограничить ток через арматуру. Когда мощность сначала применяется к двигателю, якорь не вращается, счетчик ЭДС равно нулю, а единственным фактором, ограничивающим ток якоря, является сопротивление якоря. [ 19 ] Поскольку проспективный ток через арматуру очень велик, необходимость возникает для дополнительного сопротивления последовательно с арматурой, чтобы ограничить ток до тех пор, пока вращение двигателя не сможет построить противоречие. Когда вращение двигателя нарастает, сопротивление постепенно вырезается.
Наиболее заметная характеристика DC Series Rate DC Motor заключается в том, что его скорость почти полностью зависит от крутящего момента, необходимого для управления нагрузкой. Это подходит для больших инерционных нагрузок, поскольку двигатель ускоряется от максимального крутящего момента, постепенно уменьшается крутящий момент с увеличением скорости.
Поскольку скорость серии двигателя может быть опасно высокой, серии двигателей часто ориентированы или прямо подключаются к нагрузке. [ 20 ]
Постоянный магнитный двигатель
[ редактировать ]Двигатель постоянного DC с постоянным магнитом характеризуется линейной зависимостью между крутящим моментом с прилавкой, когда крутящий момент максимален с валом на постоянной стадии и скорости без нагрузки без примененного крутящего вала и максимальной скорости выходной системы. Между этими двумя точками скоростной оси существует квадратная мощность. [ 21 ]
Защита
[ редактировать ]Чтобы продлить срок службы DC Motor, защитные устройства [ 22 ] и контроллеры двигателя используются для защиты его от механического повреждения, чрезмерной влаги, высокого диэлектрического напряжения и высокой температуры или термической перегрузки. [ 23 ] Эти защитные устройства ощущают условия моторики. [ 24 ] и либо активируйте сигнал тревоги, чтобы уведомить оператора, либо автоматически отменять двигатель, когда происходит неисправное состояние. Для перегруженных условий двигатели защищены реле тепловой перегрузки . Би-металлические тепловые защитные защитники встроены в обмотки двигателя и изготовлены из двух разнородных металлов. Они спроектированы так, что биметаллические полосы будут сгибаться в противоположных направлениях, когда достигается установленная температурная точка, чтобы открыть цепь управления и отменять двигатель. Нагреватели являются внешними тепловыми перегрузками, подключенными последовательно с обмотками двигателя и установленными в контактеле двигателя . Обогреватели для горшка растопляются в условиях перегрузки, которые заставляют цепь управления двигателем отменять двигатель. Биметаллические обогреватели функционируют так же, как встроенные биметаллические защитники. Предохранители и автоматические выключатели - это перегрузки или защитники короткого замыкания . Реле разлома земли также обеспечивает защиту от перегрузки. Они контролируют электрический ток между обмотками двигателя и Земная система земля . У моторных генераторов реле обратного тока предотвращают разгрузку и моторизацию аккумулятора. Поскольку потеря моторного поля постоянного тока может вызвать опасное бегемое состояние или условие переизбывания, потеря полевых реле [ 25 ] соединены параллельно с полем двигателя, чтобы почувствовать ток поля. Когда ток поля уменьшается ниже установленной точки, реле будет обезболиваться на якоре двигателя. Заблокированное условие ротора предотвращает ускорение двигателя после начала его начальной последовательности. Дистанционные реле защищают двигатели от разломов заблокированного ротора. Защита от двигателя занижающего напряжения обычно включается в контроллеры или стартеры двигателя. Кроме того, двигатели могут быть защищены от перенапряжений или всплесков с помощью изоляционных трансформаторов , оборудования для кондиционирования питания , движений , арестователей и гармонических фильтров. Условия окружающей среды, такие как пыль, взрывные пары, вода и высокие температуры окружающей среды, могут отрицательно повлиять на работу двигателя постоянного тока. Чтобы защитить двигатель от этих условий окружающей среды, Национальная ассоциация производителей электриков (NEMA) и Международная электротехническая комиссия (МЭК) имеют стандартизированную моторную корпус [ 26 ] Проекты на основе защиты окружающей среды, которую они предоставляют от загрязняющих веществ. Современное программное обеспечение также может быть использовано на этапе проектирования, например, моторной CAD , чтобы помочь повысить тепловую эффективность двигателя.
DC моторные стартеры
[ редактировать ]Контр-Эмф помогает сопротивлению якоря ограничить ток через арматуру. Когда питание сначала применяется к двигателю, якорь не вращается. В этот момент контр-ЭМФ составляет ноль, а единственным фактором, ограничивающим ток якоря, является сопротивление якоря и индуктивность. Обычно сопротивление якоря двигателя составляет менее 1 Ом; Поэтому ток через арматуру будет очень большим, когда применяется мощность. Этот ток может сделать чрезмерную каплю напряжения, влияющую на другое оборудование в цепи и даже защитные устройства перегрузки.
Следовательно, необходимость возникает для дополнительного сопротивления последовательно с якорой, чтобы ограничить ток до тех пор, пока вращение двигателя не сможет создать противодействие. Когда вращение двигателя нарастает, сопротивление постепенно вырезается.
Руководящее начало реостат
[ редактировать ]
Когда электрические технологии и технологии постоянного тока были впервые разработаны, большая часть оборудования постоянно ухаживала за оператором, обученным управлению моторными системами. Самые первые системы управления двигателями были почти полностью ручными, а сопровождающий запускал и останавливал двигатели, очищали оборудование, ремонтировали любые механические сбои и так далее.
Первые стартеры DC также были полностью ручными, как показано на этом изображении. Обычно оператору потребовалось около десяти секунд, чтобы медленно продвигать реостат через контакты, чтобы постепенно увеличивать входную мощность до рабочей скорости. Было два разных класса этих реостатов, один использовался только для запуска, и один для начала и регулирования скорости. Начальный реостат был дешевле, но имел меньшие элементы сопротивления, которые сгорели бы, если потребуется для запуска двигателя с постоянной сниженной скоростью.
Этот стартер включает в себя функцию магнитного удержания без напряжения, которая приводит к появлению реостата в положении с выключенной, если мощность потеряна, так что двигатель позже не пытается перезагрузить в полновольном положении. Он также обладает защитой от перегрузки , которая переезжает на рычаг в положение выключения, если обнаружено чрезмерное ток на установленную сумму. [ 27 ]
Трехточечный стартер
[ редактировать ]Входящие силовые провода называются L1 и L2. Как следует из названия, есть только три соединения с стартером, одно с входящей силой, одно к арматуре и одно на поле. Соединения с арматурой называются A1 и A2. Катушка поля (волнение) называется F1 и F2. Чтобы контролировать скорость, реостат поля подключен последовательно с полем шунта. Одна сторона линии связана с рукой стартера. Рука загружена, поэтому он вернется на «Off», когда она не будет удерживаться на какой-либо другой позиции.
- На первом этапе руки напряжение полного линии наносится на поле шунта. Поскольку полевой реостат обычно устанавливается на минимальное сопротивление, скорость двигателя не будет чрезмерной; Кроме того, двигатель будет развивать большой стартовый крутящий момент.
- Стартер также соединяет электромагнит последовательно с полем шунта. Он удержит руку в положении, когда рука вступает в контакт с магнитом.
- Между тем, это напряжение применяется к полю шунта, а начальное сопротивление ограничивает ток до арматуры.
- По мере того, как мотор поднимает контр-Эмф скорости; Рука перемещается медленно до короткого.
Четырехточечный стартер
[ редактировать ]Четырехточечный стартер устраняет недостаток трехточечного стартера. В дополнение к тем же трем точкам, которые использовались с трехточечным стартером, другая сторона линии, L1, является четвертой точкой, представленной на стартеру, когда рука перемещается из «выключенного» положения. Катушка удерживающего магнита подключена через линию. Удерживающий магнит и стартовые резисторы функционируют, как и в трехточечном стартере.
- Возможность случайного открытия полевой схемы довольно удаленная. Стартер с четырьмя точками обеспечивает защиту от мотора без напряжения. Если питание не удается, двигатель отключается от линии.
Параметры и оценка статистики
[ редактировать ]- Несколько исследований предлагают либо не интеллектуальные оценки, которые зависят от модели, таких как расширенный фильтр Калмана (EKF) [ 28 ] [ 29 ] и наблюдатель Луенбергера, [ 30 ] или интеллектуальные оценки, такие как каскадная нейронная сеть (CFNN) и квази-ньютон BFGS BackPropagation [ 31 ] .
Смотрите также
[ редактировать ]Ссылки
[ редактировать ]- ^ Хокинс Электрический Гид
- ^ Gottlieb, IM (1994). Электродвигатели и методы управления (2 -е изд.). Tab Books.
- ^ DC Code Speed Speed Speed Speed Code.
- ^ Разработка и моделирование систем управления для мобильной платформы мобильных роботов полевого обследования.
- ^ Ландер, Кирилл В. (1993). «8 DC Machine Control ». Силовая электроника (3 -е изд.). Лондон: MC Graw Hill International UK. ISBN 0-07-707714-8 .
- ^ Невилл, S.: «Использование коэффициента Картера с узкими зубами», Труды Института инженеров -электриков , 1967, 114, (9), с. 1245-1250
- ^ Hameyer, p. 66, уравнение 5-3437
- ^ Линн, §8-144, с. 826, уравнение 8-17
- ^ Hameyer, p. 66, уравнение 5-20
- ^ Линн, §8-146, с. 826, уравнение 8-18
- ^ Hameyer, p. 66, уравнение 5-23
- ^ Линн, §147, с. 827, уравнение 8-21
- ^ Линн, §8-147, с. 827, уравнение 8-20
- ^ Hameyer, p. 68, уравнение 5-31
- ^ Линн, §147, с. 827, уравнение 8-22
- ^ Линн, §8-148 до §8-151, с. 827-828
- ^ Hameyer, p. 69
- ^ Alger, §7-278, p
- ^ Alger, §7-277, p
- ^ Линн, §8-154, с. 828
- ^ Что вы покрываете
- ^ Герман, Стивен Л. Электродвигатель управление двигателем. 9 -е изд. Delmar, Cengage Learning, 2009. Стр. 12.
- ^ Малкольм Барнс. Практические переменные скоростные приводы и электроника. Elsevier, Newnes, 2003. Page 151.
- ^ Дж. Льюис Блэкберн. Защитная реле: принципы и приложения. CRC Press, 1998. Стр. 358.
- ^ Огайо Электродвигатели. DC двигатель защиты. Огайо Электродвигатели. 2011. Архивировано 6 декабря 2011 г., на The Wayback Machine
- ^ Х. Уэйн Битти и Джеймс Л. Киртли. Руководство по электрическому моторугу. McGraw-Hill Professional, 1998. Стр. 97.
- ^ Хокинс электрический гид . Тео. Audel & Co. 1917. С. 664–669.
- ^ Pantonial, Roel; Килантанг, Алан; Буэнаобра, Бернардино (ноябрь 2012 г.). «Тепловая оценка в реальном времени мотоцикла моторного постоянного тока с помощью постоянного алгоритма фильтра Kalman в схеме многократного отбора проб». Tencon 2012 IEEE Region 10 Conference . С. 1–6. doi : 10.1109/tencon.2012.6412194 . ISBN 978-1-4673-4824-9 Полем S2CID 25418197 .
- ^ Acarnley, pp; Al-Tayie, JK (январь 1997 г.). «Оценка скорости и температуры якоря в матовом приводе постоянного тока с использованием расширенного фильтра Калмана» . IEE COURTINGINGINGS - ЭЛЕКТРИЧЕСКИЕ ПРИМЕНЕНИЯ . 144 (1): 13–20. doi : 10.1049/ip-epa: 19970927 . ISSN 1350-2352 . Архивировано из оригинала 1 февраля 2020 года.
- ^ Nestler, H.; Саттлер, Ph K. (1993-01-01). «Он-лайн-оценка температур в электрических машинах наблюдателем». Электрические машины и энергосистемы . 21 (1): 39–50. doi : 10.1080/07313569308909633 . ISSN 0731-356X .
- ^ Мелла, Хацене; Hemsas, Kamel Eddoine; Талеб, Рахид; Cecati, Carlo (2018). «Оценка скорости, температуры и сопротивления якоря в матовых машинах постоянного тока с использованием CFNN на основе BFGS BP». Турецкий журнал электротехники и компьютерных наук . 26 (6): 3182–3192. Arxiv : 1902.03171 . doi : 10.3906/elk-1711-330 . S2CID 69944028 .
Библиография
[ редактировать ]- Alger, PL (1949). «§7-277 до §7-287 'AC Commutator Motors» в разделах 7-генераторы и двигатели переменного тока ». В Ноултоне, AE (ред.). Стандартное руководство для инженеров -электриков (8 -е изд.). МакГроу-Хилл. С. 826–831.
- Hameyer, Kay (2001). «§5.2« Основные уравнения »в разделе 5 - машины постоянного тока». Электрическая машина I: Основы, дизайн, функция, работа . RWTH AACHEN УНИВЕРСИТЕТНЫЙ ИНСТИТУТ ЭЛЕКТРИЧЕСКИХ Машин.
- Линн, С. (1949). «§8-144 до §8-165« двигательные характеристики и регулирование »в разделах 8-Генераторы и двигатели с прямым током». В Ноултоне, AE (ред.). Стандартное руководство для инженеров -электриков (8 -е изд.). МакГроу-Хилл. С. 826–831.
- MIT CIPD (2009). «Понимание моторных характеристик DC» . Проектирование с DC Motors . MIT, Мех. Инжиниринг, CIPD . Получено 2008-12-11 .
Внешние ссылки
[ редактировать ]- Как работают электродвигатели (извлечено из веб -архива 2014/31/01)