Евклидовы плоскости в трехмерном пространстве

В евклидовой геометрии плоскость — это плоская двумерная , поверхность простирающаяся до бесконечности. Евклидовы плоскости часто возникают как подпространства трехмерного пространства. .Прототипическим примером является одна из стен комнаты, бесконечно протяженная и предполагаемая бесконечно тонкая.Хотя пара действительных чисел достаточно для описания точек на плоскости, взаимосвязь с точками вне плоскости требует особого рассмотрения для их встраивания в окружающее пространство .


Производные концепции
[ редактировать ]Плоский сегмент (или просто «плоскость» в обыденном использовании) представляет собой плоскую область поверхности ; это аналог отрезка прямой .Бивектор — это ориентированный плоский сегмент, аналог направленных отрезков прямых .Грань твердый — это сегмент плоскости, ограничивающий объект . [1] Плита – это область, ограниченная двумя параллельными плоскостями.Параллелепипед – это область , ограниченная тремя парами параллельных плоскостей.
Встречаемость в природе
[ редактировать ]
Плоскость служит математической моделью многих физических явлений, таких как зеркальное отражение в плоском зеркале или волновые фронты в бегущей плоской волне .Свободная поверхность невозмущенных жидкостей имеет тенденцию быть почти плоской (см. Плоскость ).Самая плоская поверхность, когда-либо созданная, представляет собой квантово-стабилизированное атомное зеркало. [2] В астрономии различные опорные плоскости для определения положения на орбите используются . Анатомические плоскости могут быть латеральными («сагиттальными»), фронтальными («корональными») или поперечными.В геологии пласты (слои отложений) часто имеют плоскую форму.Плоскости участвуют в различных формах изображения , таких как фокальная плоскость , картинная плоскость и плоскость изображения .

Фон
[ редактировать ]Евклид предложил первую великую веху математической мысли — аксиоматическую трактовку геометрии. [3] Он выбрал небольшое ядро неопределенных терминов (называемых общими понятиями ) и постулатов (или аксиом ), которые затем использовал для доказательства различных геометрических утверждений. Хотя план в его современном понимании нигде в « Элементах» не имеет прямого определения , его можно рассматривать как часть общих понятий. [4] Евклид никогда не использовал числа для измерения длины, угла или площади. Евклидова плоскость, снабженная выбранной декартовой системой координат, называется декартовой плоскостью ; недекартову евклидову плоскость, снабженную полярной системой координат, назвали бы полярной плоскостью .

Плоскость — это линейчатая поверхность .
Евклидова плоскость
[ редактировать ]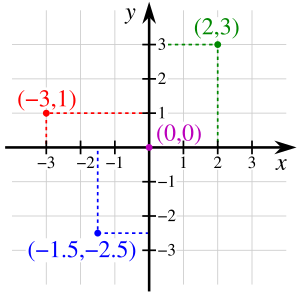
В математике евклидова плоскость — это евклидово пространство размерности два , обозначаемое или . Это геометрическое пространство , в котором два действительных числа требуются для определения положения каждой точки . Это аффинное пространство , которое включает в себя, в частности, концепцию параллельных линий . Он также имеет метрические свойства, обусловленные расстоянием , что позволяет определять круги и измерять углы .


Евклидова плоскость с выбранной декартовой системой координат называется декартовой плоскостью .
Набор упорядоченных пар действительных чисел ( действительная координатная плоскость ), снабженная скалярным произведением , часто называют евклидовой плоскостью , поскольку каждая евклидова плоскость изоморфна ей.Представительство
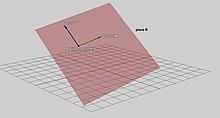
[ редактировать ]В этом разделе рассматриваются исключительно плоскости, вложенные в трех измерениях: в частности, в R 3 .
Определение по содержащимся точкам и линиям
[ редактировать ]В евклидовом пространстве любого числа измерений плоскость однозначно определяется любым из следующих факторов:
- Три неколлинеарные точки (точки, не лежащие на одной линии).
- Линия и точка, не лежащие на этой прямой.
- Две разные, но пересекающиеся линии.
- Две разные, но параллельные линии.
Характеристики
[ редактировать ]Следующие утверждения справедливы в трехмерном евклидовом пространстве, но не в более высоких измерениях, хотя у них есть аналоги в более высоких измерениях:
- Две различные плоскости либо параллельны, либо пересекаются по прямой .
- Линия либо параллельна плоскости, пересекает ее в одной точке, либо содержится в плоскости.
- Две различные прямые, перпендикулярные одной и той же плоскости, должны быть параллельны друг другу.
- Две различные плоскости, перпендикулярные одной и той же прямой, должны быть параллельны друг другу.
Точка – нормальная форма и общая форма уравнения плоскости
[ редактировать ]Подобно тому, как линии в двумерном пространстве описываются с использованием формы точечного наклона для их уравнений, плоскости в трехмерном пространстве имеют естественное описание с использованием точки на плоскости и вектора, ортогонального ей ( нормальный вектор ) для обозначения его «наклона».
В частности, пусть r 0 будет вектором положения некоторой точки P 0 = ( x 0 , y 0 , z 0 ) , и пусть n = ( a , b , c ) будет ненулевым вектором. Плоскость, определяемая точкой P 0 и вектором n, состоит из тех точек P с вектором положения r , что вектор, проведенный из P 0 в P, перпендикулярен n . Вспоминая, что два вектора перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю, отсюда следует, что искомую плоскость можно описать как набор всех точек r таких, что Точка здесь означает скалярное произведение .
В расширенном виде это становится что является точечно-нормальной формой уравнения плоскости. [5] Это просто линейное уравнение где что представляет собой расширенную форму





В математике принято выражать нормаль как единичный вектор , но приведенный выше аргумент справедлив для вектора нормали любой ненулевой длины.
И наоборот, легко показать, что если a , b , c и d являются константами и не все a , b и c равны нулю, то график уравнения — плоскость, имеющая вектор n = ( a , b , c ) в качестве нормали. [6] Это знакомое нам уравнение плоскости называется общей формой уравнения плоскости. [7]
Так, например, уравнение регрессии формы y = d + ax + cz (с b = −1 ) устанавливает плоскость наилучшего соответствия в трехмерном пространстве при наличии двух объясняющих переменных.
Описание плоскости с точкой и двумя лежащими на ней векторами.
[ редактировать ]В качестве альтернативы плоскость может быть описана параметрически как набор всех точек вида

где s и t варьируются по всем действительным числам, v и w — заданные линейно независимые векторы , определяющие плоскость, а r 0 — вектор, представляющий положение произвольной (но фиксированной) точки на плоскости. Векторы v и w можно представить как векторы, начинающиеся с r 0 и указывающие в разных направлениях вдоль плоскости. Векторы v и w могут быть перпендикулярны , но не могут быть параллельны.
Описание плоскости через три точки.
[ редактировать ]Пусть p 1 = ( x 1 , y 1 , z 1 ) , p 2 = ( x 2 , y 2 , z 2 ) и p 3 = ( x 3 , y 3 , z 3 ) — неколлинеарные точки.
Способ 1
[ редактировать ]Плоскость, проходящая через , p1 p2 и точки p3 , может быть описана как совокупность всех точек ( x , y , z ), которые удовлетворяют следующим определяющим уравнениям:

Способ 2
[ редактировать ]Описать плоскость уравнением вида , решите следующую систему уравнений:




Эту систему можно решить, используя правило Крамера и основные матричные манипуляции. Позволять

Если D не равно нулю (то есть для плоскостей, не проходящих через начало координат), значения a , b и c можно рассчитать следующим образом:



Эти уравнения являются параметрическими по d . Установка d равным любому ненулевому числу и подстановка его в эти уравнения даст один набор решений.
Способ 3
[ редактировать ]Эту плоскость также можно описать приведенным выше рецептом « точка и вектор нормали ». Подходящий вектор нормали определяется векторным произведением а точкой r 0 можно считать любую из заданных точек p 1 , p 2 или p 3 [8] (или любую другую точку плоскости).

Операции
[ редактировать ]Расстояние от точки до плоскости
[ редактировать ]В евклидовом пространстве расстояние от точки до плоскости — это расстояние между данной точкой и ее ортогональной проекцией на плоскость, расстояние по перпендикуляру до ближайшей точки на плоскости.
Его можно найти, начиная с замены переменных , которая перемещает начало координат так, чтобы оно совпадало с заданной точкой, а затем находя точку на сдвинутой плоскости. то, что ближе всего к источнику . Полученная точка имеет декартовы координаты. :


- .


Пересечение линии и плоскости
[ редактировать ]
В аналитической геометрии пересечение линии и плоскости в трехмерном пространстве может быть пустым множеством , точкой или линией. Это вся линия, если эта линия встроена в плоскость, и пустое множество, если линия параллельна плоскости, но находится вне ее. В противном случае линия пересекает плоскость в одной точке.
Различение этих случаев и определение уравнений для точки и линии в последних случаях находят применение в компьютерной графике , планировании движения и обнаружении столкновений .Линия пересечения двух плоскостей
[ редактировать ]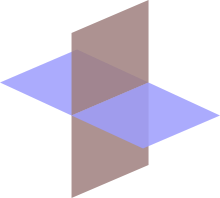
Пересечение сферы и плоскости
[ редактировать ]Когда пересечение сферы и плоскости не является пустым или единственной точкой, это круг. Это можно увидеть следующим образом:
Пусть S — сфера с центром O , P — плоскость, S. пересекающая Нарисуйте OE перпендикулярно P и встретите P в E. точке Пусть A и B — любые две разные точки пересечения. Тогда AOE и BOE — прямоугольные треугольники с общей стороной OE и гипотенузами AO и BO равными. Следовательно, остальные стороны AE и BE равны. Это доказывает, что все точки пересечения находятся на одинаковом расстоянии от точки E в плоскости P все точки пересечения лежат на окружности C с центром E. , другими словами , [9] Это доказывает, что пересечение P и S содержится в C . Обратите внимание, что OE — это ось круга.
рассмотрим точку D окружности C. Теперь Поскольку C лежит в P , то же самое делает D. и С другой стороны, треугольники AOE и DOE — прямоугольные треугольники с общей стороной OE и катетами EA и ED равными. Следовательно, гипотенузы AO и DO равны и равны радиусу S так что D лежит в S. , Это доказывает, что содержится в пересечении P и S. C
Как следствие, на сфере существует ровно одна окружность, которую можно провести через три заданные точки. [10]
Доказательство можно расширить, чтобы показать, что все точки окружности находятся на общем угловом расстоянии от одного из ее полюсов. [11]
Сравните также конические сечения , из которых можно получить овалы .См. также
[ редактировать ]Примечания
[ редактировать ]- ^ Университетский словарь Мерриам-Вебстера (одиннадцатое изд.). Спрингфилд, Массачусетс: Мерриам-Вебстер . 2004.
- ^ Эванс, Джон (22 августа 2008 г.). «Самая гладкая поверхность — это зеркало для атомов» . Новый учёный . Проверено 5 марта 2023 г.
- ^ Евс 1963 , с. 19
- ^ Джойс, DE (1996), Элементы Евклида, Книга I, Определение 7 , Университет Кларка , получено 8 августа 2009 г.
- ^ Антон 1994 , с.
- ^ Антон 1994 , стр. 156.
- ^ Вайсштейн, Эрик В. (2009), «Самолет» , MathWorld — веб-ресурс Wolfram , получено 8 августа 2009 г.
- ^ Докинз, Пол, «Уравнения плоскостей» , Исчисление III.
- ^ Доказательство следует за Хоббсом, предложение 304.
- ^ Хоббс, предложение 308.
- ^ Хоббс, предложение 310.
Ссылки
[ редактировать ]- Антон, Ховард (1994), Элементарная линейная алгебра (7-е изд.), John Wiley & Sons, ISBN 0-471-58742-7
- Ивс, Ховард (1963), Обзор геометрии , том. Я, Бостон: Allyn and Bacon, Inc.
Внешние ссылки
[ редактировать ]- «Самолет» , Энциклопедия математики , EMS Press , 2001 [1994]
- Вайсштейн, Эрик В. «Самолет» . Математический мир .
- «Облегчение трудностей арифметики и планарной геометрии» — это арабская рукопись XV века, служащая учебным пособием по плоской геометрии и арифметике.