Инструментальный подход
Возможно, эту статью необходимо реорганизовать, чтобы она соответствовала рекомендациям Википедии по оформлению . ( сентябрь 2024 г. ) |

В авиации заход на посадку или процедура захода на посадку ( IAP ) — это серия заранее определенных маневров, направленных на упорядоченный перевод самолета, действующего по правилам полета по приборам, от начала первоначального захода на посадку или до точки, из которой происходит посадка. можно сделать визуально . [ 1 ] Эти подходы одобрены в Европейском Союзе EASA и властями соответствующих стран, а в США — ФАУ или Министерством обороны США для вооруженных сил. ИКАО начальной точки определяет заход на посадку по приборам как «серию заранее определенных маневров с использованием пилотажных приборов со специальной защитой от препятствий от захода на посадку или, где это применимо, от начала определенного маршрута прибытия до точки, из которой может быть совершена посадка». завершено, а затем, если приземление не завершено, в положение, в котором применяются критерии ожидания или на маршруте ». пролета препятствий [ 2 ]
Существует три категории процедур захода на посадку по приборам: точный заход на посадку (PA), заход на посадку с вертикальным наведением (APV) и неточный заход на посадку (NPA). При точном заходе на посадку используется навигационная система, которая обеспечивает наведение по курсу и глиссаде . Примеры включают радар точного захода на посадку (PAR), систему посадки по приборам (ILS) и систему посадки GBAS (GLS). При подходе с вертикальным наведением также используется навигационная система отклонения курса и глиссады, но не по тем же стандартам, что и у PA. Примеры включают баро-VNAV , средства курсового радиомаяка (LDA) с глиссадой, LNAV /VNAV и LPV . При неточном заходе на посадку используется навигационная система для отклонения от курса, но не предоставляется информация о глиссаде. Эти подходы включают VOR , NDB , LP (производительность локализатора) и LNAV. PA и APV выполняются на высоте/высоте принятия решения (DH/DA), тогда как неточные заходы на посадку выполняются на минимальной высоте снижения (MDA). [ 2 ] : 757 [ 3 ]
Карты IAP — это аэронавигационные карты , на которых отображены аэронавигационные данные, необходимые для выполнения захода на посадку по приборам в аэропорт. Помимо изображения топографических особенностей, опасностей и препятствий, на них изображены процедуры и схема аэропорта. В каждой схеме схемы используется определенный тип электронной навигационной системы, такой как NDB, TACAN , VOR, ILS/ MLS и RNAV . [ 2 ] : 981–982 Название карты отражает основное навигационное средство (NAVAID), если имеется более одной схемы с прямым входом или если это просто схема с круговым движением. Полоса связи на схеме показывает частоты в том порядке, в котором они используются. В дополнение к минимальной безопасной высоте (MSA) для чрезвычайных ситуаций указаны минимальная, максимальная и обязательная высоты. Крест обозначает высоту окончательного захода на посадку (FAF) на NPA, а молния делает то же самое для PA. NPA отображает MDA, а PA показывает как высоту принятия решения (DA), так и высоту принятия решения (DH). Наконец, на диаграмме показаны процедуры ухода на второй круг в виде плана и профиля, а также последовательность шагов. [ 4 ] : 4–9, 4–11, 4–19, 4–20, 4–41
До того, как спутниковая навигация (ГНСС) стала доступна для гражданской авиации, потребность в крупных наземных навигационных средствах (NAVAID) обычно ограничивала использование инструментальных заходов на посадку к наземным (т.е. асфальтовым, гравийным, газонным, ледяным) взлетно-посадочным полосам (и на авианосцах ). Технология GNSS позволяет, по крайней мере теоретически, создавать инструментальные подходы к любой точке поверхности Земли (будь то на суше или на воде); следовательно, в настоящее время существуют примеры водных аэродромов (таких как база гидросамолетов на озере Рейнджли в штате Мэн , США), которые используют заходы на посадку на основе GNSS.
Сегменты инструментального подхода
[ редактировать ]Схема захода на посадку по приборам может содержать до пяти отдельных сегментов, которые отображают курс, расстояние и минимальную высоту. Эти сегменты [ 4 ] : 4–43, 4–53
- Фидерные маршруты : маршрут, по которому самолет должен следовать от структуры маршрута к IAF , который включает курс и направление полета, расстояние и минимальную высоту. [ 4 ] : 4–43
- Участок начального захода на посадку : этот сегмент обеспечивает метод выравнивания самолета с промежуточным или конечным участком захода на посадку и разрешение снижения во время выравнивания. Он начинается на IAF и заканчивается на промежуточном участке захода на посадку или промежуточной контрольной точке (IF). Могут быть задействованы дуга DME , разворот по схеме/ капельный разворот или схема ожидания, либо конечный маршрут может просто пересекать курс конечного захода на посадку. [ 4 ] : 4–50
- Участок промежуточного захода на посадку : на этом этапе самолет позиционируется для окончательного снижения в аэропорт. Он начинается на IF и заканчивается на конечном участке захода на посадку. [ 4 ] : 4–53
- Конечный участок захода на посадку : для PA или APV этот участок начинается там, где глиссада пересекает плоскость высоты пересечения глиссады. Для NPA этот сегмент начинается в FAF, точке конечного захода на посадку (FAP) или в месте, где воздушное судно выходит на курс конечного захода на посадку. Этот сегмент заканчивается либо в назначенной точке ухода на второй круг (MAP), либо при приземлении. [ 4 ] : 4–53
- Участок ухода на второй круг : этот сегмент начинается на MAP и заканчивается в точке или контрольной точке, где начинается начальный или маршрутный сегмент. [ 4 ] : 4–54
Когда воздушное судно находится под радиолокационным контролем , управление воздушным движением (УВД) может заменить некоторые или все эти этапы захода на посадку радиолокационными векторами (радарное векторение ИКАО — это предоставление навигационного руководства воздушному судну в виде конкретных курсов на основе использование радара). [ 2 ] : 1033 УВД будет использовать воображаемые «шлагбаумы подхода» при направлении самолета на конечный курс захода на посадку. Эти ворота будут находиться на расстоянии 1 морской мили (миль) от FAF и не менее чем в 5 морских милях от порога приземления. За пределами радиолокационной среды подход по приборам начинается с IAF. [ 4 ] : 4–54, 4–56
Типы подходов
[ редактировать ]Хотя наземные подходы NAVAID все еще существуют, ФАУ переходит к подходам спутникового базирования (RNAV). Кроме того, вместо опубликованной процедуры захода на посадку полет может продолжаться до посадки по ППП , при этом повышая эффективность прибытия при контактном или визуальном заходе на посадку. [ 4 ] : 4–57
Визуальный подход
[ редактировать ]Визуальный заход на посадку представляет собой разрешение УВД воздушному судну, выполняющему план полета по ППП, визуально проследовать в аэропорт предполагаемой посадки; это не процедура захода на посадку по приборам. [ 5 ]
Визуальный заход на посадку может быть запрошен пилотом или предложен органом УВД. Визуальные заходы на посадку возможны, когда погодные условия позволяют постоянный визуальный контакт с аэропортом назначения. Их выдают в таких погодных условиях с целью ускорить обработку движения по ППП. Должно быть заявлено или ожидается, что потолок будет составлять не менее 1000 футов над уровнем земли ( над уровнем земли ), а видимость - не менее 3 см (статутных миль). [ 4 ] : 4–57
Пилот может принять разрешение на визуальный заход на посадку, как только пилот увидит аэропорт назначения. Согласно док. ИКАО. 4444, пилоту достаточно видеть местность, чтобы принять визуальный заход на посадку. Дело в том, что если пилот знаком с местностью в окрестностях аэродрома, он может легко найти дорогу к аэропорту, имея поверхность в поле зрения. УВД должно убедиться, что погодные условия в аэропорту превышают определенные минимумы (в США потолок составляет 1000 футов над уровнем моря или выше, а видимость не менее 3 статутных миль) перед выдачей разрешения. Согласно док. ИКАО. 4444, достаточно, если пилот сообщит, что, по его мнению, погодные условия позволяют осуществить визуальный заход на посадку. В общем, информацию о погоде предоставляет диспетчер УВД, но решение о том, подходит ли погода для посадки, принимает пилот. После того как пилот принял разрешение, он/она берет на себя ответственность за эшелонирование и предотвращение турбулентности в следе и может осуществлять навигацию по мере необходимости для визуального завершения захода на посадку. Согласно док. ИКАО. 4444, УВД продолжает обеспечивать эшелонирование самолетов, совершающих визуальный заход на посадку, и других прибывающих и вылетающих воздушных судов. Пилот может взять на себя ответственность за эшелонирование с предшествующим воздушным судном, если он/она видит предшествующий самолет и получил соответствующее указание от УВД. В Соединенных Штатах требуется, чтобы самолет находился в поле зрения аэропорта, взлетно-посадочной полосы или предыдущего самолета. [ 4 ] : 4–57 Недостаточно иметь местность в поле зрения (см. подход #Контакт ). [ 6 ]
Когда пилот соглашается на визуальный заход на посадку, он берет на себя ответственность за установление безопасного интервала приземления позади идущего впереди воздушного судна, а также ответственность за предотвращение турбулентности в спутном следе и за то, чтобы оставаться вдали от облаков. [ 4 ] : 4–57 [ 6 ]
Контактный подход
[ редактировать ]Контактный подход, который может быть запрошен пилотом (но не предложен УВД), при котором пилот имеет видимость в полете 1 SM, свободен от облаков и, как ожидается, сможет поддерживать эти условия на всем пути до аэропорта. Пилот несет ответственность за устранение препятствий и уклонение от движения по ПВП. [ 4 ] : 4–58 [ 6 ]
Написанные процедуры визуального полета (CVFP)
[ редактировать ]Визуальный заход на посадку с указанием заданного маршрута, по которому самолет должен следовать в аэропорт. Пилоты должны иметь визуальный ориентир или приближающийся самолет в поле зрения, а погода должна быть на уровне опубликованных минимумов или выше них. Пилоты несут ответственность за соблюдение безопасного интервала захода на посадку и эшелонирование в следе турбулентности . [ 4 ] : 4–58
Заход на посадку по RNP (ранее заход на посадку по RNAV)
[ редактировать ]Эти подходы включают как наземные, так и спутниковые системы и включают критерии зон прибытия в терминал (TAA), базовые критерии захода на посадку и критерии конечного захода на посадку. TAA представляет собой переход от структуры маршрута к среде аэродрома, который обеспечивает минимальные высоты для пролета препятствий. TAA представляет собой конструкцию «Т» или «базовый Т» с IAF левой и правой базовой опоры на начальных участках захода на посадку, перпендикулярных промежуточному участку захода на посадку, где имеется IF/IAF двойного назначения для процедуры с прямым входом (без разворота по схеме). NoPT]), или изменение курса удержания вместо поворота процедуры (HILPT). Базовый участок IAF находится в 3–6 морских милях от IF/IAF. Basic-T выровнен по осевой линии ВПП, при этом IF находится на расстоянии 5 морских миль от FAF, а FAF - на расстоянии 5 морских миль от порога. [ 4 ] : 4–58, 4–60, 4–61
Карта захода на посадку по RNP должна иметь четыре линии минимумов захода на посадку, соответствующие LPV, LNAV/VNAV, LNAV и кружению. Это позволяет воздушному судну, оснащенному GPS или WAAS, использовать LNAV MDA только с использованием GPS, если WAAS становится недоступным. [ 7 ] : 4–26
ИЛС-подход
[ редактировать ]Это наиболее точные и точные подходы. Взлетно-посадочная полоса с ILS способна принять 29 прилетающих самолетов в час. [ 7 ] : 4–63 Системы ILS на двух или трех взлетно-посадочных полосах увеличивают пропускную способность за счет параллельного (зависимого) ILS, одновременного параллельного (независимого) ILS, точного контроля ВПП (PRM) и сходящихся заходов на посадку по ILS. Подходы ILS имеют три классификации: CAT I, CAT II и CAT III. CAT I SA, CAT II и CAT III требуют дополнительной сертификации для операторов, пилотов, самолетов и оборудования, при этом CAT III используется в основном авиаперевозчиками и военными. Для одновременных параллельных заходов на посадку требуется, чтобы осевые линии взлетно-посадочной полосы находились на расстоянии от 4300 до 9000 футов друг от друга, а также «специальный конечный диспетчер контроля» для наблюдения за разделением самолетов. При одновременных близко параллельных (независимых) заходах на посадку PRM расстояние между ВПП должно составлять от 3400 до 4300 футов. Заходы на посадку по приборам с одновременным смещением (SOIA) применяются к взлетно-посадочным полосам, расположенным на расстоянии 750–3000 футов. SOIA использует ILS/PRM на одной взлетно-посадочной полосе и LDA/PRM с глиссадой на другой. [ 4 ] : 4–64, 4–65, 4–66
подход VOR
[ редактировать ]Эти заходы на посадку используют средства VOR в аэропорту и за его пределами и могут быть дополнены DME и TACAN. [ 4 ] : 4–69
подход НБР
[ редактировать ]Эти подходы используют средства NDB в аэропорту и за его пределами и могут быть дополнены DME. Эти подходы постепенно сходят на нет в западных странах. [ 4 ] : 4–69, 4–72
Радарный подход
[ редактировать ]Это будет либо радар точного захода на посадку (PAR), либо радар наблюдения за аэропортом (ASR). Информация публикуется в табличном виде. PAR обеспечивает вертикальное и боковое наведение, а также дальность действия. ASR предоставляет только информацию о курсе и дальности. [ 4 ] : 4–72, 4–75

Воздушный радиолокационный подход
[ редактировать ]Это редкий тип захода на посадку, при котором радар, установленный на приближающемся самолете, используется в качестве основного средства навигации при заходе на посадку. В основном он используется на морских нефтяных платформах и некоторых военных базах. [ 8 ] При этом типе подхода используется взлетно-посадочная полоса или, чаще, нефтяная платформа, которая выделяется из окружающей среды, если смотреть на радар. [ 9 ] Для дополнительной видимости на радаре радиолокационные отражатели . вдоль взлетно-посадочной полосы могут быть установлены [ 10 ]
Подход локализатора
[ редактировать ]Эти подходы включают в себя подход с использованием курсового радиомаяка , подход с использованием курсового маяка/DME, подход с использованием курсового маяка на обратном курсе и систему курсовой помощи типа курсового маяка (LDA). В случаях, когда установлена ILS, вместе с курсовым маяком может быть доступен обратный курс. Обратное зондирование происходит на обратном курсе с использованием стандартного оборудования VOR. При использовании системы индикатора горизонтального положения (HSI) распознавание заднего хода исключается, если оно установлено соответствующим образом на передний курс. [ 4 ] : 4–76, 4–78
Упрощенный подход направленного средства (SDF)
[ редактировать ]Этот тип подхода аналогичен подходу курсового маяка ILS, но с менее точным наведением. [ 4 ] : 4–78
Неточные подходы и системы
[ редактировать ]
Неточные системы обеспечивают боковое наведение (т. е. информацию о курсе), но не обеспечивают вертикальное наведение (т. е. наведение по высоте или глиссаде).
- Всенаправленный диапазон УКВ (VOR)
- Тактическая аэронавигация (ТАКАН)
- Ненаправленный маяк (NDB) – наземный передатчик для самолетов, оснащенных автоматическим пеленгатором (ADF).
- Упрощенное средство направленного действия (SDF)
- Спутниковые навигационные системы, такие как американская система глобального позиционирования (GPS). LNAV и LNAV / VNAV Подходы требуют автономного мониторинга целостности приемника (RAIM), который обнаруживает проблемы со спутниками GPS. LPV (производительность курсового маяка с вертикальным наведением) и LP (без вертикального наведения) не требуют RAIM, поскольку они используют SBAS корректирующий сигнал , такой как глобальная система дополнений (WAAS) или Европейская геостационарная навигационная служба (EGNOS).
- Требуемые навигационные характеристики (RNP) - система, которая использует бортовой мониторинг характеристик через систему управления полетом самолета.
- Локализатор
- Указатель курса типа курсового маяка (LDA)
- Подход к радиолокационному наблюдению (SRA) - также известный в некоторых странах как подход ASR.
- Радар наблюдения за аэропортом (ASR) - военное обозначение SRA.
- Подход VDF - в наши дни редкость, но основан на том, что авиадиспетчер определяет направление прибытия радиопередачи УКВ самолета и направляет пилота на основе этой информации. Может также существовать в виде карты , в которой навигация по VDF под управлением диспетчера сочетается с расчетом пути пилотом. [ 11 ]
Прецизионные подходы и системы
[ редактировать ]Системы точного захода на посадку обеспечивают как боковое (по курсу), так и вертикальное (глиссада) наведение.
- Наземный управляемый заход (GCA)
- Система посадки GBAS (GLS)
- Система инструментальной посадки (ILS)
- Объединенная система точного захода на посадку и посадки (JPALS)
- Микроволновая система посадки (МЛС)
- РЛС точного захода на посадку (PAR)
- Транспондерная система посадки (TLS)
Основные понятия
[ редактировать ]Высота принятия решения или высота
[ редактировать ]
При точном заходе на посадку высота принятия решения (DH) или высота принятия решения (DA) — это заданная наименьшая высота или высота при заходе на посадку, при которой, если требуется визуальный ориентир для продолжения захода на посадку (например, разметка ВПП или окружающая среда на ВПП) не виден пилоту, пилот должен инициировать уход на второй круг . [ 2 ] : 1000 [ 4 ] : 4–20 (Высота принятия решения измеряется AGL (над уровнем земли), а высота принятия решения измеряется выше MSL (среднего уровня моря).) Конкретные значения для DH и/или DA в данном аэропорту устанавливаются с намерением предоставить пилоту достаточно времени безопасно перенастроить самолет для набора высоты и выполнения процедур ухода на второй круг, избегая при этом местности и препятствий. Хотя DH/DA обозначает высоту, на которой должна быть начата процедура ухода на второй круг, это не препятствует снижению воздушного судна ниже предписанного DH/DA.
Минимальная высота снижения (MDA)
[ редактировать ]
При неточном заходе на посадку (то есть когда электронная глиссада не предусмотрена) минимальная высота снижения (MDA) — это наименьшая высота, выраженная в футах над средним уровнем моря, до которой разрешено снижение на конечном заходе на посадку или во время полета по кругу. -наземное маневрирование с выполнением стандартной процедуры захода на посадку по приборам. [ 2 ] : 1019 [ 4 ] : 4–19 [ 12 ] Пилот может снижаться до MDA и поддерживать ее, но не должен снижаться ниже нее до тех пор, пока не будет получен визуальный ориентир, и должен инициировать уход на второй круг, если визуальный ориентир не был получен при достижении точки ухода на второй круг (MAP).
DH/DA, соответствующий параметр для точного захода на посадку, отличается от MDA тем, что процедура ухода на второй круг должна быть начата немедленно по достижении DH/DA, если визуальный ориентир еще не получен: но при этом допускается некоторое отклонение ниже этого значения, потому что вертикального импульса, необходимого для следования по глиссаде точного захода на посадку.
Если на ВПП определены как неточный, так и точный заход на посадку, MDA неточного захода на посадку почти всегда больше, чем DH/DA точного захода на посадку, из-за отсутствия вертикального наведения при неточном заходе на посадку. Дополнительная высота зависит от точности навигационных средств, на которых основан подход, при этом заходы на посадку ADF и SRA, как правило, имеют самые высокие MDA.
Прямой подход IFR
[ редактировать ]Заход на посадку по приборам, при котором окончательный заход на посадку начинается без предварительного выполнения разворота по схеме, не обязательно завершающегося посадкой с прямой или выполнением минимумов посадки с прямой. [ 2 ] : 1041 Прямой заход на посадку по приборам не требует разворота по схеме или каких-либо других процедур изменения курса для выравнивания (обычно обозначается надписью «NoPT» на табличках захода на посадку), поскольку направление прибытия и конечный курс захода на посадку не слишком отличаются друг от друга. Прямой заход на посадку может быть завершен приземлением по прямой или схемой посадки по кругу.
Процедура изменения курса
[ редактировать ]
Некоторые схемы захода на посадку не допускают захода на посадку с прямой, если пилоты не управляются радиолокационным вектором. В таких ситуациях пилотам необходимо выполнить разворот по схеме (PT) или другое изменение курса, как правило, в пределах 10 морских миль от контрольной точки PT, чтобы вывести воздушное судно на промежуточный или конечный участок захода на посадку. [ 4 ] : 4–49 При любом типе захода на посадку, если воздушное судно не выровнено для захода на посадку по прямой, может потребоваться изменение курса. Идея изменения курса состоит в том, чтобы позволить достаточно большие изменения курса полета (чтобы выровнять самолет с курсом конечного захода на посадку), не занимая при этом слишком много места по горизонтали и оставаясь при этом в пределах защищенного воздушного пространства. Это достигается одним из трех способов: разворотом по схеме, ожиданием или каплевидным разворотом курса.
- Ход процедуры (ПТ)
- ИКАО определяет PT как маневр, при котором выполняется разворот от назначенного пути, за которым следует поворот в противоположном направлении, чтобы дать возможность воздушному судну перехватить и продолжить движение по направлению, обратному назначенному пути. [ 2 ] : 775, 1030 [ 4 ] : 4–49 Стандартизированный способ изменения курса для выстраивания в линию для финального захода на посадку. На схеме захода на посадку должно быть указано, что для захода на посадку разрешен разворот по схеме, с помощью символа «зазубрина процедурного разворота» или аналогичного обозначения. Обратите внимание, что при наличии процедурного разворота для захода на посадку максимальная скорость самолета при выполнении процедурного разворота ограничивается правилами (обычно она не должна превышать 200 узлов по IAS). Разворот по схеме обычно вводится путем отслеживания исходящего курса навигационных средств (обычно после обратного курса приближающегося) с последующим поворотом на 45 ° от курса; после этого пилот летит на этом участке определенное время, затем выполняет разворот на 180°, чтобы выйти на перехватывающий курс 45°, а затем повторно перехватывает приближающийся курс.
- Удержание вместо процедуры поворота
- Он устанавливается на окончательной или промежуточной контрольной точке, когда заход на посадку может быть выполнен по правильно выровненной схеме ожидания. Это обязательный маневр, как и PT, за исключением случаев, когда радиолокационный самолет направляется на курс конечного захода на посадку, когда на схеме захода на посадку отображается надпись «NoPT», или когда пилот запрашивает или диспетчер советует пилоту выполнить прямой подход. [ 2 ] : 775, 1011 [ 4 ] : 4–50 Этот маневр обычно называют «паттерном гоночной трассы». Это еще один метод изменения курса, но его также можно использовать для потери высоты в защищенном воздушном пространстве. Схема ожидания, используемая для этой цели, обозначается в публикациях правительства США как символ схемы ожидания «удержание вместо PT». Процедура состоит из двух параллельных этапов с поворотами на 180° между ними.
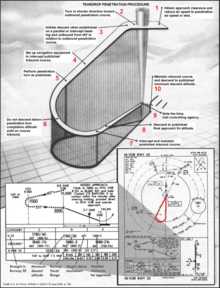
Диаграмма проникновения капли, показывающая каплевидный поворот в сочетании с одновременным спуском. - Каплевидная процедура или поворот проникновения
- Схема «капля» состоит из отклонения от первоначального контрольного пункта захода на посадку на пути удаления с последующим разворотом в сторону и пересечением курса приближения в промежуточном контрольном пункте или точке или до него. [ 2 ] : 775 Если контролируемое воздушное пространство чрезвычайно ограничено, можно использовать каплю, чтобы изменить направление движения самолета и позволить ему потерять высоту. Эта процедура, если смотреть на диаграмму, имеет форму идеализированной капли, отсюда и название. Обычно он состоит из полета по курсу удаления под углом 30 ° к обратному курсу приближения с последующим поворотом на 210 ° для пересечения курса приближения.

Маневр по кругу и посадке
[ редактировать ]Заход на посадку по кругу — это маневр, инициируемый пилотом для выравнивания воздушного судна по взлетно-посадочной полосе для посадки, когда посадка по прямой при заходе на посадку по приборам невозможна или нежелательна, и только после того, как было получено разрешение УВД и пилот установил и поддерживает необходимую визуальную привязку к аэропорту. [ 2 ] : 994 [ 4 ] : 4–11 Маневр по кругу и приземлению является альтернативой приземлению по прямой. Это маневр, используемый, когда взлетно-посадочная полоса не выровнена в пределах 30 градусов от конечного курса захода на посадку по приборам или для конечного захода на посадку требуется снижение 400 футов (или более) на морскую милю и, следовательно, требуется некоторое визуальное маневрирование самолета. в районе аэропорта после завершения приборной части захода на посадку для выравнивания самолета с взлетно-посадочной полосой для посадки.
Очень часто маневр по кругу на посадку выполняется во время захода на посадку с прямой к другой ВПП, например, заход на посадку по ILS к одной ВПП, за которым следует переход на малой высоте, заканчивающийся посадкой на другую ( не обязательно параллельная) ВПП. Таким образом, схемы захода на посадку на одну взлетно-посадочную полосу могут использоваться для посадки на любую взлетно-посадочную полосу в аэропорту, поскольку на других взлетно-посадочных полосах могут отсутствовать схемы по приборам или их заходы на посадку не могут быть использованы по другим причинам (соображения дорожного движения, выход из строя навигационных средств и т. д.). ).
Заход на посадку по кругу считается более трудным и менее безопасным, чем посадка по прямой, особенно в метеорологических условиях по приборам , поскольку самолет находится на малой высоте и должен оставаться на небольшом расстоянии от аэропорта, чтобы быть уверенным в преодолении препятствий (часто в пределах пары миль, даже для более быстрых самолетов). Пилот должен постоянно поддерживать визуальный контакт с аэропортом; потеря визуального контакта требует выполнения процедуры ухода на второй круг.
Пилоты должны знать, что существуют значительные различия в критериях преодоления препятствий между схемами, разработанными в соответствии с PANS-OPS ИКАО и TERPS США. Это особенно справедливо в отношении заходов на посадку по кругу, где предполагаемый радиус поворота и минимальный просвет препятствий заметно различаются. [ 13 ] [ 14 ] [ 15 ]
Маневр в сторону
[ редактировать ]Визуальный маневр, выполняемый пилотом по завершении захода на посадку по приборам, позволяющий совершить посадку по прямой на параллельной ВПП на расстоянии не более 1200 футов по обе стороны от ВПП, к которой был выполнен заход на посадку по приборам. [ 2 ] : 793–795, 1038 [ 16 ]
Формула скорости снижения
[ редактировать ]Полезная формула, которую пилоты используют для расчета скорости снижения (для стандартной глиссады 3°):
- Скорость снижения = (путевая скорость ⁄ 2) × 10
или
- Скорость снижения = путевая скорость × 5.
Для других углов глиссады:
- Скорость снижения = угол глиссады × путевая скорость × 100/60 ,
где скорость снижения измеряется в футах в минуту, а путевая скорость — в узлах .
Последний заменяет tan α (см. ниже) на α/60 , что имеет погрешность около 5% до 10°.
Пример:
120 kn × 5 or 120 kn / 2 × 10 = 600 ft/min
Приведенные выше упрощенные формулы основаны на тригонометрическом расчете:
- Скорость снижения = путевая скорость × 101,27 × tan α
где:
- α - угол снижения или глиссады от горизонтали (стандартно 3 °).
- 101.27 ( фут/мин ⁄ кн ) — коэффициент перевода узлов в футы в минуту (1 узел = 1 Нью-Мексико ⁄ h ≈ 6076 футы ⁄ ч ≈ 101,27 футов/мин)
Пример:
Ground speed = 120 kn
α = 3°
120 kn × 101.27ft/min/kn × tan 3°
≈ 640 ft/min
Требования аэропорта
[ редактировать ]Особые соображения при выполнении полетов в условиях плохой видимости включают улучшение освещения зоны захода на посадку, взлетно-посадочных полос и рулежных дорожек, а также расположение аварийного оборудования. Должны существовать резервные электрические системы, чтобы в случае сбоя питания резервная система взяла на себя работу необходимого оборудования аэропорта (например, ILS и освещения). Критические зоны ILS должны быть свободны от других самолетов и транспортных средств, чтобы избежать многолучевого распространения .
В Соединенных Штатах требования и стандарты установления заходов на посадку по приборам в аэропорту содержатся в Приказе ФАУ 8260.3 «Стандарт США для процедур терминала по приборам (TERPS)». [ 14 ] ИКАО публикует требования в документе ИКАО Doc 8168 «Правила аэронавигационного обслуживания. Производство полетов воздушных судов (PANS-OPS), том II: Построение схем визуальных и инструментальных полетов». [ 15 ]
Горные аэропорты, такие как международный аэропорт Рино-Тахо (KRNO), предлагают существенно разные заходы на посадку самолетов по приборам на одну и ту же взлетно-посадочную полосу, но с противоположных направлений. Самолеты, приближающиеся с севера, должны установить визуальный контакт с аэропортом на большей высоте, чем самолет, приближающийся с юга, из-за быстро поднимающейся местности к югу от аэропорта. [ 17 ] Эта большая высота позволяет летному экипажу преодолеть препятствие, если приземление невозможно. В целом, каждый конкретный заход на посадку по приборам определяет минимальные погодные условия, которые должны присутствовать для совершения посадки.
См. также
[ редактировать ]Дальнейшее чтение
[ редактировать ]- Справочник по процедурам с прибором . ФАА . 2017 . Проверено 19 февраля 2019 г.
- «Неточный подход с постоянным углом» (PDF) . Фонд безопасности полетов. Август – ноябрь 2000 г. Проверено 6 мая 2013 г.
- «Электронный свод федеральных правил (США)» . Проверено 6 мая 2013 г.
- «Тренинг по точному монитору взлетно-посадочной полосы (PRM)» . ФАА . 19 марта 2013 г. Проверено 6 мая 2013 г.
Ссылки
[ редактировать ]- ^ «Процедура инструментального подхода». Глоссарий пилота/диспетчера (PDF) . ФАА . 26 мая 2016 г. Архивировано из оригинала (PDF) 29 июля 2016 г. Проверено 19 августа 2016 г.
- ^ Jump up to: а б с д и ж г час я дж к л Серия FAR и AIM ASA 2012 года . Aviation Supplies & Academics, Inc. 2011. с. 1013. ИСБН 9781560278580 .
- ^ «Спутниковая навигация — реализация NAS. Реализация NAS — процедуры — характеристики курсового маяка (LP)» . ФАА . Министерство транспорта США . Проверено 7 ноября 2022 г.
- ^ Jump up to: а б с д и ж г час я дж к л м н тот п д р с т в v В х и С аа Справочник по процедурам работы с прибором, FAA-H-8083-16A . Федеральное управление гражданской авиации . 2015.
- ^ «Архивная копия» . Архивировано из оригинала 8 декабря 2014 г. Проверено 2 марта 2015 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ Jump up to: а б с «Архивная копия» . Архивировано из оригинала 3 марта 2015 г. Проверено 2 марта 2015 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ Jump up to: а б Справочник по процедурам работы с прибором, FAA-H-8083-16B (PDF) . Федеральное управление гражданской авиации . 2017.
- ^ Консультативный циркуляр 90-80C (PDF) , Федеральное управление гражданской авиации , 21 декабря 2017 г. , получено 1 сентября 2021 г.
- ^ Роу, Филип А. (9 сентября 1996 г.). «Воздушные радиолокационные подходы» . AVweb . Проверено 1 сентября 2021 г.
- ^ Стандарт НАТО AATCP-1 - Дополнение НАТО к документу ИКАО Doc 8168-OPS/611, том II, посвященный подготовке процедуры захода на посадку и вылета по приборам (PDF) (ред.). Бюро стандартизации НАТО . Июнь 2017. С. 60–63. Архивировано (PDF) из оригинала 28 октября 2022 г. Проверено 28 октября 2022 г.
- ^ «Аэропорт Варшава Окенце - Исторические схемы подхода» . konbriefing.com . Проверено 13 сентября 2022 г.
- ^ Справочник по полетам по приборам (PDF) . ФАА . 2012. с. Г-12 . Проверено 6 мая 2013 г.
- ^ Подход по кругу - разница между PANS-OPS ИКАО и TERPS США, SKYbrary
- ^ Jump up to: а б «Приказ 8260.3C «Стандарт США для процедур терминальных приборов (TERPS)» » (PDF) . ФАА . 14 марта 2016 г. Проверено 4 декабря 2017 г.
- ^ Jump up to: а б Правила аэронавигационного обслуживания. Производство полетов воздушных судов (PANS-OPS), Том II: Разработка процедур визуального и инструментального полета (PDF) (5-е изд.). ИКАО . 2006. Архивировано из оригинала (PDF) 19 мая 2016 г. Проверено 27 января 2013 г.
- ^ Балтер, Дж. Дебора (1 января 2004 г.). Аэронавигационный словарь: с упором на термины связи УВД . Траффорд Паблишинг. п. 217. ИСБН 9781412008655 .
- ^ См. Таблички захода на посадку «LOC RWY 16R», «ILS RWY 16R» и «ILS или LOC/DME RWY 34L» в KRNO.
Аудио и мультимедийные ресурсы
[ редактировать ]- Аудио и комментарии захода на посадку по полной схеме RNAV (GPS) в международный аэропорт Флинт Бишоп (KFNT)
- Аудиозапись проверки рейтинга по приборам в США – Часть 1 (включая RNAV 18 в KFNT )
- Звук проверки рейтинга приборов в США - Часть 2 (включая VOR 9 на частичной панели KFNT и ILS 9R на KPTK)
Внешние ссылки
[ редактировать ]- Патрик Ламберт. «Системы посадки самолетов» . [ самостоятельно опубликованный источник? ]
- Джеймс Олбрайт (27 апреля 2017 г.). «Подход к невозможному: «стул летит» к минимуму или не к минимуму» . Деловая и коммерческая авиация . Сеть «Неделя авиации».
- Руководство для летного экипажа – Точный заход на посадку – Полеты категории I
- Руководство для летного экипажа – Точный заход на посадку – Полеты категории II
- Руководство для летного экипажа – Точный заход на посадку – Полеты категории III
- Руководство для летного экипажа – Неточный заход на посадку