Система посадки по приборам
В авиации система посадки по приборам ( ILS ) представляет собой точную радионавигационную на ближнее расстояние систему, которая обеспечивает наведение самолетов , позволяя им приближаться к взлетно-посадочной полосе ночью или в плохую погоду. В своей первоначальной форме он позволяет самолету приближаться к земле на высоте 200 футов (61 м) в пределах 1 ⁄ мили (800 м) взлетно-посадочной полосы. В этот момент взлетно-посадочная полоса должна быть видна пилоту; если это не так, они выполняют уход на второй круг . Подведение самолета так близко к взлетно-посадочной полосе значительно увеличивает диапазон погодных условий, в которых безопасную посадку можно совершить . В других версиях системы или «категориях» еще больше уменьшены минимальные высоты, дальность видимости на взлетно-посадочной полосе (RVR), а также конфигурации передатчиков и мониторинга, разработанные в зависимости от обычных ожидаемых погодных условий и требований безопасности аэропорта.

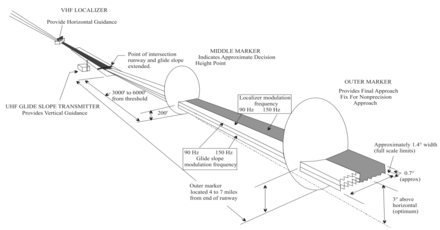
ILS использует два направленных радиосигнала : курсовой маяк (частота от 108 до 112 МГц), который обеспечивает горизонтальное наведение, и глиссаду (частота от 329,15 до 335 МГц) для вертикального наведения. Взаимосвязь между положением самолета и этими сигналами отображается на бортовых приборах , часто дополнительных указателях авиагоризонта . Пилот пытается маневрировать самолетом, чтобы удержать указатели по центру, пока он приближается к взлетно-посадочной полосе до высоты принятия решения . Дополнительные маркерные маяки предоставляют информацию о расстоянии по мере захода на посадку, включая средний маркер (MM), расположенный рядом с положением высоты принятия решения (CAT 1). Маркеры в значительной степени выводятся из обращения и заменяются дальномерным оборудованием (DME). ILS обычно включает освещение высокой интенсивности в конце взлетно-посадочной полосы, чтобы помочь пилоту определить местонахождение взлетно-посадочной полосы и перейти от захода на посадку к визуальной посадке. [1]
В период с 1920-х по 1940-е годы был разработан ряд радиосистем приземления, в частности луч Лоренца , который относительно широко использовался в Европе до Второй мировой войны . Разработанная в США система SCS-51 была более точной, но при этом имела вертикальное наведение. Многие комплекты были установлены на авиабазах в Соединенном Королевстве во время Второй мировой войны , что привело к тому, что после образования Международной организации гражданской авиации (ИКАО) в 1947 году он был выбран в качестве международного стандарта. Было разработано несколько конкурирующих систем приземления, в том числе радиолокационный (MLS ) наземный подход (GCA) и более новая микроволновая система посадки , но лишь немногие из этих систем были развернуты. ILS и по сей день остается широко распространенным стандартом.
Внедрение точных заходов на посадку с использованием глобальных навигационных спутниковых систем (GNSS) вместо дорогостоящей инфраструктуры аэропорта ведет к замене ILS. только маломощного всенаправленного усиливающего Для обеспечения необходимой точности с помощью GNSS обычно требуется трансляция из аэропорта сигнала, что значительно дешевле, чем использование нескольких больших и мощных передатчиков, необходимых для полной реализации ILS. К 2015 году количество аэропортов США, поддерживающих заходы на посадку LPV, подобные ILS, превысило количество установок ILS. [2] Ожидается, что это в конечном итоге приведет к отмене ILS в большинстве аэропортов.
Принцип работы
[ редактировать ]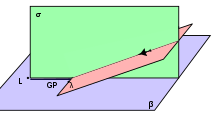
Система посадки по приборам работает как наземная система захода на посадку по приборам , которая обеспечивает точное боковое и вертикальное наведение самолета, приближающегося и приземляющегося на взлетно-посадочной полосе , используя комбинацию радиосигналов и, во многих случаях, массивы огней высокой интенсивности, позволяющие безопасная посадка в метеорологических условиях по приборам (IMC) , таких как низкие потолки или ограниченная видимость из-за тумана, дождя или метели.
Балочные системы
[ редактировать ]Предыдущие радиосредства слепой посадки обычно представляли собой лучевые системы различных типов. Обычно они состояли из радиопередатчика, который был подключен к моторизованному переключателю для создания набора точек и тире азбуки Морзе . Переключатель также контролировал, на какую из двух направленных антенн посылался сигнал. Результирующий сигнал, посылаемый в воздух, состоит из точек, направленных на одну сторону взлетно-посадочной полосы, и тире на другую. Балки были достаточно широкими, поэтому перекрывались в центре. [3]
Для использования системы самолету требовался только обычный радиоприемник. Подходя к аэропорту, они настраивали сигнал и слушали его в наушниках. Они услышали бы точки и тире (азбука Морзе «А» или «N»), если бы они находились сбоку от взлетно-посадочной полосы или если бы они были правильно выровнены, они смешивались вместе, чтобы произвести устойчивый тон, равнозначный сигнал . Точность этого измерения во многом зависела от навыков оператора, который часто прослушивал сигнал в наушниках в шумном самолете и одновременно общался с вышкой. [3]
Точность системы обычно составляла порядка 3 градусов по азимуту. Хотя это было полезно для вывода самолета в направлении взлетно-посадочной полосы, оно было недостаточно точным, чтобы безопасно вывести самолет на дальность видимости в плохую погоду; радиокурсовые лучи использовались только для бокового наведения, и одной системы было недостаточно для выполнения посадки в сильный дождь или туман. Тем не менее окончательное решение о посадке было принято всего в 300 метрах (980 футов) от аэропорта. [3]
Концепция ИЛС
[ редактировать ]ILS, разработанная незадолго до начала Второй мировой войны , использовала более сложную систему сигналов и антенную решетку для достижения более высокой точности. Это требует значительно большей сложности наземной станции и передатчиков, причем то преимущество, что сигналы могут быть точно декодированы на самолете с помощью простой электроники и отображены непосредственно на аналоговых приборах. [3] Приборы можно разместить перед пилотом, что избавляет радиста от необходимости постоянно следить за сигналами и передавать результаты пилоту по внутренней связи .
Ключом к его работе является концепция, известная как индекс амплитудной модуляции , мера того, насколько сильно амплитудная модуляция применяется к несущей частоте . В более ранних лучевых системах сигнал полностью включался и выключался, что соответствовало индексу модуляции 100%. Определение угла внутри луча основано на сравнении звуковой силы двух сигналов.
В ILS более сложная система сигналов и антенн изменяет модуляцию двух сигналов по всей ширине диаграммы направленности. Система основана на использовании боковых полос , вторичных частот, которые создаются при смешивании двух разных сигналов. Например, если взять радиочастотный сигнал частотой 10 МГц и смешать его со слышимым тоном частотой 2500 Гц, будут созданы четыре сигнала с частотами исходных сигналов 2500 и 10000000 герц и боковыми полосами 9997500 и 10002500 герц. Частота исходного сигнала 2500 Гц слишком низка, чтобы распространяться далеко от антенны, но все три других сигнала являются радиочастотными и могут эффективно передаваться. [4]
ILS начинается с смешивания двух модулирующих сигналов с несущей, одного с частотой 90 Гц, а другого с частотой 150. В результате создается сигнал с пятью радиочастотами: несущей и четырьмя боковыми полосами. Этот комбинированный сигнал, известный как CSB (что означает «несущая и боковые полосы»), равномерно передается антенной решеткой. CSB также отправляется в схему, которая подавляет исходную несущую, оставляя только четыре сигнала боковой полосы. Этот сигнал, известный как SBO (только боковые полосы), также отправляется на антенную решетку. [4]
Для бокового наведения, известного как курсовой маяк , антенна обычно размещается по центру в дальнем конце взлетно-посадочной полосы и состоит из нескольких антенн в решетке, обычно примерно такой же ширины, как и взлетно-посадочная полоса. Каждая отдельная антенна имеет определенный фазовый сдвиг и уровень мощности, применяемый только к сигналу SBO, так что результирующий сигнал задерживается на 90 градусов на левой стороне взлетно-посадочной полосы и опережает на 90 градусов справа. Кроме того, сигнал частотой 150 Гц инвертируется с одной стороны диаграммы направленности, что приводит к еще одному сдвигу на 180 градусов. Из-за того, как сигналы смешиваются в пространстве, сигналы SBO деструктивно интерферируют и практически исключают друг друга вдоль центральной линии, оставляя преобладающим только сигнал CSB. В любом другом месте, по обе стороны от центральной линии, сигналы SBO и CSB комбинируются по-разному, так что преобладает один модулирующий сигнал. [4]
Приемник перед решеткой будет принимать оба этих сигнала, смешанные вместе. Используя простые электронные фильтры, исходную несущую и две боковые полосы можно разделить и демодулировать для извлечения исходных амплитудно-модулированных сигналов частотой 90 и 150 Гц. Затем они усредняются для получения двух сигналов постоянного тока (DC). Каждый из этих сигналов представляет собой не силу исходного сигнала, а силу модуляции относительно несущей, которая варьируется в зависимости от диаграммы направленности. Это имеет большое преимущество: измерение угла не зависит от дальности. [4]
Два сигнала постоянного тока затем отправляются на обычный вольтметр , при этом выходной сигнал с частотой 90 Гц перемещает стрелку вправо, а другой влево. Вдоль центральной линии два модулирующих тона боковых полос будут погашены, и оба напряжения станут равными нулю, а стрелка останется в центре дисплея. Если самолет находится далеко влево, сигнал частотой 90 Гц будет создавать сильное напряжение постоянного тока (преобладает), а сигнал частотой 150 Гц минимизируется, перемещая иглу до упора вправо. Это означает, что вольтметр напрямую отображает как направление, так и величину поворота, необходимого для возврата самолета на осевую линию взлетно-посадочной полосы. [4] Поскольку измерение сравнивает различные части одного сигнала полностью в электронике, оно обеспечивает угловое разрешение менее градуса и позволяет построить прецизионный подход . [4]
Хотя схема кодирования сложна и требует значительного количества наземного оборудования, результирующий сигнал намного точнее, чем в старых лучевых системах, и гораздо более устойчив к распространенным формам помех. Например, помехи в сигнале будут одинаково влиять на оба субсигнала, поэтому они не окажут никакого влияния на результат. Аналогичным образом, изменения общей мощности сигнала по мере приближения самолета к взлетно-посадочной полосе или изменения из-за замирания мало повлияют на конечные результаты измерений, поскольку обычно они одинаково влияют на оба канала. Система подвержена эффектам многолучевого искажения из-за использования нескольких частот, но поскольку эти эффекты зависят от местности, они обычно фиксируются по местоположению и могут быть учтены посредством регулировки антенны или фазовращателей. [4]
Кроме того, поскольку именно кодирование сигнала внутри луча содержит информацию об угле, а не об силе луча, сигнал не обязательно должен быть жестко сфокусирован в пространстве. В старых лучевых системах точность равносигнальной области зависела от диаграммы направленности двух направленных сигналов, что требовало, чтобы они были относительно узкими. Схема ILS может быть гораздо шире. Обычно установки ILS должны быть пригодны для использования в пределах 10 градусов по обе стороны от осевой линии взлетно-посадочной полосы на расстоянии 25 морских миль (46 км; 29 миль) и 35 градусов по обе стороны на расстоянии 17 морских миль (31 км; 20 миль). Это позволяет использовать самые разнообразные пути подхода. [5]
Глиссада работает так же, как курсовой курс , и использует ту же кодировку, но обычно передается для получения осевой линии под углом 3 градуса над горизонтом. [а] от антенны рядом с взлетно-посадочной полосой, а не в конце. Единственная разница между сигналами заключается в том, что курсовой маяк передается на более низких несущих частотах, используя 40 выбранных каналов в диапазоне от 108,10 до 111,95 МГц, тогда как глиссада имеет соответствующий набор из 40 каналов в диапазоне от 328,6 до 335,4 МГц. Более высокие частоты обычно приводят к тому, что излучающие антенны глиссады становятся меньше. Пары каналов не являются линейными; Канал 1 курсового маяка находится на отметке 108,10 и соединен с глиссадой на отметке 334,70, тогда как второй канал находится на отметке 108,15 и 334,55. В обеих полосах есть пробелы и скачки. [5] [6]
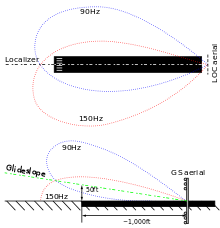
Многие иллюстрации концепции ILS часто показывают, что система работает более похоже на лучевые системы с сигналом 90 Гц с одной стороны и 150 Гц с другой. Эти иллюстрации неточны; оба сигнала излучаются по всей диаграмме направленности, их относительная разница в глубине модуляции (DDM) меняется в зависимости от положения приближающегося самолета.
Использование ИЛС
[ редактировать ]Схема процедуры захода на посадку по приборам (или « табличка захода на посадку ») публикуется для каждого захода на посадку по ILS, чтобы предоставить информацию, необходимую для выполнения захода на посадку по ILS во время выполнения операций по правилам полетов по приборам (IFR) . На карте указаны радиочастоты, используемые компонентами ILS или навигационными средствами, а также предписанные минимальные требования к видимости.
Воздушное судно, приближающееся к взлетно-посадочной полосе, управляется приемниками ILS в самолете путем сравнения глубины модуляции. Многие самолеты могут передавать сигналы автопилоту для автоматического выполнения захода на посадку. ILS состоит из двух независимых подсистем. Локализатор обеспечивает боковое наведение; глиссада обеспечивает вертикальное наведение.
Локализатор
[ редактировать ]
Локализатор (LOC или LLZ до стандартизации ИКАО). [7] ) представляет собой антенную решетку, обычно расположенную за пределами вылета ВПП и обычно состоящую из нескольких пар направленных антенн.
Курсор позволит самолету развернуться и совместить его с взлетно-посадочной полосой. После этого пилоты активируют фазу захода на посадку (APP).
Глиссадный склон (G/S)
[ редактировать ]

Пилот управляет самолетом так, чтобы индикатор глиссады оставался в центре дисплея, чтобы гарантировать, что самолет следует по глиссаде примерно на 3° выше горизонтали (уровня земли), оставаясь над препятствиями и достигая взлетно-посадочной полосы в правильной точке приземления (т. е. он обеспечивает вертикальное наведение).
Ограничения
[ редактировать ]Из-за сложности курсового радиомаяка ILS и систем глиссады существуют некоторые ограничения. Системы курсового радиомаяка чувствительны к препятствиям в зоне трансляции сигнала, таким как большие здания или ангары. Системы глиссады также ограничены рельефом местности перед антеннами глиссады. Если местность наклонная или неровная, отражения могут создать неровную глиссаду, вызывая нежелательные отклонения стрелки. Кроме того, поскольку сигналы ILS направлены в одном направлении в результате расположения решеток, глиссада поддерживает только заходы на посадку по прямой с постоянным углом снижения. Установка ILS может оказаться дорогостоящей из-за критериев выбора места и сложности антенной системы.
Критические зоны ILS и чувствительные зоны ILS установлены во избежание опасных отражений, которые могут повлиять на излучаемый сигнал. Расположение этих критических зон может помешать самолетам использовать определенные рулежные дорожки. [8] что приводит к задержкам взлета, увеличению времени ожидания и увеличению разделения самолетов .
Вариант
[ редактировать ]- Система наведения по приборам (IGS) ( система курсового управления курсового типа (LDA) в США) - модифицированная ILS для обеспечения непрямолинейного захода на посадку; Самый известный пример - заход на взлетно-посадочную полосу 13 в Кай Так аэропорту в Гонконге . [9] [10]
- Система посадки авианосца (ICLS) - модифицированная ILS для посадки авианосца.
Идентификация
[ редактировать ]Помимо ранее упомянутых навигационных сигналов, курсовой маяк обеспечивает опознание объекта ILS путем периодической передачи опознавательного сигнала азбуки Морзе частотой 1020 Гц . Например, ILS для взлетно-посадочной полосы 4R в международном аэропорту Джона Ф. Кеннеди передает IJFK для идентификации, а взлетно-посадочная полоса 4L известна как IHIQ. Это позволяет пользователям знать, что оборудование работает нормально и что они настроены на правильную систему ILS. Глиссадная станция не передает опознавательный сигнал, поэтому оборудование ILS для идентификации использует курсовой маяк.
Мониторинг
[ редактировать ]Крайне важно, чтобы пилот немедленно обнаруживал любую неспособность ILS обеспечить безопасное наведение. Для достижения этой цели мониторы постоянно оценивают важные характеристики трансмиссий. При обнаружении существенного отклонения от строгих пределов либо ILS автоматически отключается, либо компоненты навигации и опознавания снимаются с носителя. [11] Любое из этих действий активирует индикацию («флаг отказа») на приборах самолета, использующего ILS.
Курс локализатора назад
[ редактировать ]Современные антенны курсового радиомаяка являются узконаправленными . Однако использование старых, менее направленных антенн позволяет использовать неточный заход на взлетно-посадочную полосу, называемый обратным курсом курсового радиомаяка . Это позволяет самолету приземляться, используя сигнал, передаваемый с задней части массива курсового радиомаяка. Высоконаправленные антенны не обеспечивают достаточного сигнала для поддержания обратного курса. В Соединенных Штатах заходы на посадку обратным курсом обычно связаны с системами Категории I в небольших аэропортах, которые не имеют ILS на обоих концах основной взлетно-посадочной полосы. Пилоты, летящие обратным курсом, должны игнорировать любые указания глиссады.
Маркерные маяки
[ редактировать ]На некоторых установках маркерные маяки, работающие на несущей частоте предусмотрены 75 МГц. При приеме передачи от маркерного маяка на приборной панели пилота включается индикатор, и пилот слышен тон маяка. Расстояние от взлетно-посадочной полосы, на котором должно быть получено это указание, публикуется в документации для этого захода на посадку вместе с высотой, на которой должно находиться воздушное судно, если оно правильно установлено по ILS. Это обеспечивает проверку правильности работы глиссады. В современных установках ILS устанавливается DME , расположенный рядом с ILS, для дополнения или замены маркерных маяков. DME постоянно отображает расстояние самолета до взлетно-посадочной полосы.
Замена DME
[ редактировать ]Дальномерное оборудование (DME) позволяет пилотам измерять наклонную дальность расстояния до взлетно-посадочной полосы. DME дополняют или заменяют маркеры во многих установках. DME обеспечивает пилоту более точный и непрерывный контроль правильного продвижения по глиссаде ILS и не требует установки за пределами аэропорта. При использовании совместно с ILS DME часто располагается посередине между обратными порогами ВПП, при этом внутренняя задержка изменяется таким образом, чтобы один блок мог предоставлять информацию о расстоянии до любого порога ВПП. Для заходов на посадку, где вместо маркерных маяков указан DME, требуемый DME указывается в схеме захода на посадку по приборам, и воздушное судно должно иметь по крайней мере один работающий блок DME или одобренную IFR систему, использующую GNSS ( систему RNAV, соответствующую TSO- С129/-С145/-С146), [12] чтобы начать подход.
Подходящее освещение
[ редактировать ]
средней или высокой интенсивности Некоторые установки включают системы огней приближения (сокращенно ALS ). Чаще всего они находятся в крупных аэропортах, но многие небольшие аэропорты авиации общего назначения в США имеют огни приближения для поддержки своих установок ILS и достижения минимумов низкой видимости. ALS помогает пилоту перейти от полета по приборам к визуальному полету и визуально выровнять самолет по осевой линии взлетно-посадочной полосы. Наблюдение пилотом системы огней подхода на высоте принятия решения позволяет пилоту продолжать снижение к взлетно-посадочной полосе, даже если взлетно-посадочная полоса или огни взлетно-посадочной полосы не видны, поскольку ALS считается конечным окружением взлетно-посадочной полосы. В США ILS без огней приближения может иметь минимальную видимость ILS CAT I всего лишь 3 ⁄ мили (1,2 км) (дальность видимости на ВПП 4000 футов (1200 м)) если требуемые поверхности пролета препятствий свободны от препятствий.

Минимальная видимость 1 ⁄ мили (0,80 км) (дальность видимости на взлетно-посадочной полосе 2400 футов (730 м)) возможны при заходе на посадку по ILS CAT I, поддерживаемом ALS длиной от 1400 до 3000 футов (от 430 до 910 м), и Видимость 3 ⁄ мили (600 м). Дальность видимости 1800 футов (550 м) возможна, если на взлетно-посадочной полосе имеются боковые огни высокой интенсивности, огни зоны приземления и осевые огни, а также ALS длиной не менее 2400 футов (730 м). (см. Таблицу 3-3-1 «Минимальные значения видимости» в Приказе ФАУ 8260.3C). [13] По сути, ALS расширяет взлетно-посадочную полосу в сторону приземляющегося самолета и позволяет выполнять полеты в условиях низкой видимости. Заходы на посадку по ILS категорий II и III обычно требуют сложных систем огней захода на посадку высокой интенсивности, тогда как системы средней интенсивности обычно сочетаются с заходами на посадку по ILS категории I. В некоторых аэропортах без башен пилот управляет системой освещения ; например, пилот может семь раз нажать микрофон, чтобы включить свет на высокой интенсивности, пять раз на среднюю интенсивность или три раза на низкую интенсивность. [ нужна ссылка ]
Высота принятия решения и высота
[ редактировать ]После выхода на заход на посадку пилот следует по траектории захода на посадку по ILS, указанной курсовым курсом, и снижается по глиссаде до высоты принятия решения. Это высота, на которой пилот должен иметь адекватную визуальную ориентировку относительно условий приземления (например, освещения захода на посадку или ВПП), чтобы решить, продолжать ли снижение до посадки; в противном случае пилот должен выполнить процедуру ухода на второй круг , затем повторить тот же заход на посадку, попробовать другой заход на посадку или направиться в другой аэропорт. Обычно решение о том, продолжает ли пилот заход на посадку, зависит от того, видна или нет взлетно-посадочная полоса, свободна ли взлетно-посадочная полоса или нет.
Категории ИЛС
[ редактировать ]| Категория | Высота принятия решения | Дальность видимости на взлетно-посадочной полосе (RVR) |
|---|---|---|
| я [15] | > 200 футов (60 м) [б] | > 550 м (1800 футов) [с] или видимость > 800 м (2600 футов) [д] |
| II | 100–200 футов (30–60 м) | ИКАО/ФАУ: > 350 м (1200 футов) JAA (EASA): > 300 м (1000 футов) |
| III А | < 100 футов (30 м) | > 700 футов (200 м) |
| III Б | < 50 футов (15 м) | ИКАО/ФАУ: 150–700 футов (50–200 м) JAA (EASA): 250–700 футов (75–200 м) |
| III С [и] | Без ограничений | Никто |
- ^ Наклон выбран аэропортом. Аэропорт Лондон-Сити имеет необычно высокий угол глиссады - 5,5 градусов.
- ^ 150 футов (46 м) разрешено FAA при RVR > 1400 футов (430 м), самолет и экипаж категории II, HUD CAT II/III и уход на второй круг CAT II/III. [16]
- ^ 1200 футов (370 м) RVR в Канаде, [17] RVR 2600 футов (790 м) для одного экипажа [ нужна ссылка ]
- ^ Нет зоны приземления, нет освещения центральной линии.
- ^ Только ИКАО/ФАУ, не упомянутое JAA (EASA), [14] к маю 2017 года не использовался в аэропортах, самолет придется буксировать, чтобы освободить взлетно-посадочную полосу. [15]
Самолеты меньшего размера обычно оборудованы для полетов только с системой ILS CAT I. На более крупных самолетах эти заходы на посадку обычно контролируются системой управления полетом, а наблюдение осуществляет летный экипаж. CAT I полагается только на показания высотомера для определения высоты принятия решения, тогда как подходы CAT II и CAT III используют радиовысотомер (RA) для определения высоты принятия решения. [18]
ILS должна отключаться при внутреннем обнаружении неисправности. Более высокие категории требуют более короткого времени ответа; поэтому оборудование ILS должно отключаться быстрее. Например, курсовой маяк CAT I должен отключиться в течение 10 секунд после обнаружения неисправности, а курсовой маяк CAT III должен отключиться менее чем за 2 секунды. [11]
Специальные операции CAT II и CAT III
[ редактировать ]
В отличие от других операций, погодные минимумы CAT III не обеспечивают достаточных визуальных ориентиров, позволяющих произвести посадку вручную. Минимумы CAT IIIb зависят от управления выкатыванием и резервирования автопилота, [ нужна ссылка ] потому что они дают пилоту достаточно времени, чтобы решить, приземлится ли самолет в зоне приземления (в основном CAT IIIa) и обеспечить безопасность во время выката (в основном CAT IIIb). Поэтому система автоматической посадки обязательна для выполнения полетов категории III. Его надежность должна быть достаточной, чтобы обеспечить управление воздушным судном при приземлении в условиях CAT IIIa и выкатке на безопасную скорость руления в CAT IIIb (и CAT IIIc, если это разрешено). [19] Тем не менее, некоторым эксплуатантам было предоставлено специальное разрешение на заход на посадку по категории III с ручным управлением с использованием наведения на проекционном дисплее (HUD), который предоставляет пилоту изображение, просматриваемое через лобовое стекло глазами, направленными на бесконечность, необходимых электронных указаний для посадки. самолет без реальных внешних визуальных ориентиров.
В Соединенных Штатах аэропорты с заходами на посадку по CAT III имеют списки CAT IIIa и IIIb или просто CAT III на табличке захода на посадку по приборам (Процедуры терминала США). Минимальные значения RVR по CAT IIIb ограничены освещением и вспомогательными средствами ВПП/РД и соответствуют плану системы управления наземным движением в аэропорту (SMGCS). Для полетов на RVR ниже 600 футов требуются осевые огни РД и красные огни стоп-сигнала РД. Если минимальная RVR CAT IIIb на конце ВПП составляет 600 футов (180 м), что является обычным показателем в США, заходы на посадку по ILS к этому концу ВПП с RVR ниже 600 футов (180 м) квалифицируются как CAT IIIc и требуют специального руления. процедуры, освещение и условия одобрения, разрешающие посадку. Приказ FAA 8400.13D ограничивает CAT III до RVR 300 футов или выше. Приказ 8400.13D (2009 г.) разрешает специальное разрешение на заходы на посадку по категории II к взлетно-посадочным полосам без огней приближения ALSF-2 и/или огней зоны приземления/осевой линии, что расширило количество потенциальных взлетно-посадочных полос категории II.
В каждом случае требуется соответствующим образом оборудованное воздушное судно и экипаж соответствующей квалификации. Например, CAT IIIb требует отказоустойчивой системы, а также квалифицированного и действующего экипажа, тогда как CAT I этого не требует. HUD, который позволяет пилоту выполнять маневры самолета, а не автоматическая система, считается отказоустойчивым. HUD позволяет летному экипажу управлять самолетом, используя сигналы датчиков ILS, так что в случае сомнений в безопасной посадке экипаж может отреагировать соответствующим и своевременным образом. HUD становится все более популярным среди «фидерных» авиакомпаний, и большинство производителей региональных самолетов теперь предлагают HUD в качестве стандартного или дополнительного оборудования. [ нужна ссылка ] HUD может обеспечить возможность взлета в условиях плохой видимости.

Некоторые коммерческие самолеты оснащены системами автоматической посадки, позволяющими самолету приземлиться без перехода из приборов в визуальные условия для нормальной посадки. Такие операции автоматической посадки требуют специального оборудования, процедур и подготовки и включают в себя самолет, аэропорт и экипаж. Autoland — единственный способ, с помощью которого некоторые крупные аэропорты, такие как аэропорт имени Шарля де Голля, продолжают работать каждый день в году. Некоторые современные самолеты оснащены усовершенствованными системами полетного видения на основе инфракрасных датчиков, которые обеспечивают визуальную среду, подобную дневной, и позволяют выполнять операции в условиях и в аэропортах, которые в противном случае были бы неподходящими для посадки. Коммерческие самолеты также часто используют такое оборудование для взлетов, когда взлетные минимумы . не соблюдаются [20]
Как для систем автоматической посадки, так и для систем HUD оборудование требует специального одобрения на конструкцию, а также на каждую отдельную установку. В конструкции учтены дополнительные требования безопасности при эксплуатации самолета вблизи земли и способности летного экипажа реагировать на системную аномалию. К оборудованию также предъявляются дополнительные требования по техническому обслуживанию, чтобы гарантировать, что оно способно выполнять операции в условиях ограниченной видимости.
Почти вся эта подготовка и квалификация пилотов выполняется на тренажерах с разной степенью точности.
Использовать
[ редактировать ]В контролируемом аэропорту авиадиспетчерская служба направит самолет на курс курсового радиомаяка по заданным курсам, следя за тем, чтобы самолеты не приближались слишком близко друг к другу (сохраняя эшелонирование), но также, насколько это возможно, избегая задержек. Несколько самолетов могут одновременно находиться на ILS на расстоянии нескольких миль друг от друга. Считается, что воздушное судно, которое повернуло на приближающийся курс и находится в пределах двух с половиной градусов от курса курсового радиомаяка (отклонение на половину шкалы или менее, отображаемое индикатором отклонения от курса), установило заход на посадку. Обычно воздушное судно устанавливается на расстоянии не менее 2 морских миль (3,7 км) до конечной контрольной точки захода на посадку (перехват глиссады на указанной высоте).
Отклонение самолета от оптимальной траектории указывается летному экипажу с помощью шкалы дисплея (перенос с того момента, когда движение аналогового счетчика указывало на отклонение от линии курса с помощью напряжения, посылаемого с приемника ILS).
Выходной сигнал приемника ILS поступает в систему отображения (проекционный дисплей и проекционный дисплей, если он установлен) и может поступать в компьютер управления полетом . Процедура посадки самолета может быть либо объединенной , когда автопилот или компьютер управления полетом непосредственно управляет самолетом, а летный экипаж контролирует операцию, либо несвязанной , когда летный экипаж управляет самолетом вручную, чтобы удержать курсовой курс и индикаторы глиссады по центру.
История
[ редактировать ]
Испытания ILS начались в 1929 году в США, когда Джимми Дулиттл стал первым пилотом, который взлетал, летал и садил самолет, используя только приборы , без обзора за пределами кабины. [21] [22] Базовая полнофункциональная система была внедрена в 1932 году в центральном аэропорту Берлин-Темпельхоф (Германия) и названа LFF или « луч Лоренца » по имени ее изобретателя, компании C. Lorenz AG. Совет гражданской авиации (CAB) США разрешил установку системы в 1941 году в шести местах. Первая посадка регулярного пассажирского авиалайнера США с использованием ILS произошла 26 января 1938 года, когда D Pennsylvania Central Airlines Боинг 247 вылетел из Вашингтона, округ Колумбия, в Питтсбург, штат Пенсильвания, и приземлился во время метели, используя только систему посадки по приборам. [23] Первая полностью автоматическая посадка с использованием ILS произошла в марте 1964 года в аэропорту Бедфорд в Великобритании. [ нужна ссылка ]
Рынок
[ редактировать ]Выручка рынка систем посадки по приборам составила 1 215 миллионов долларов США в 2019 году и, как ожидается, достигнет 1 667 миллионов долларов США в 2025 году со среднегодовым темпом роста 5,41% в 2020–2025 годах, даже с учетом негативных последствий пандемии COVID-19 . [24]
Поставщики
[ редактировать ]В топ-10 производителей на рынке систем посадки по приборам входят:
- Специалисты по освещению аэропортов
- Доступно в Сенсе
- Расширенная навигация и позиционирование
- АБР Сейфгейт
- Универсальная авионика
- Ханивелл
- Астроника
- Системы аэропорта Либерти
- Фалес
- Рокуэлл Коллинз
Среди других производителей:
Альтернативы
[ редактировать ]- Микроволновая система посадки (MLS) позволяла заходить на посадку по дуге. Он был представлен в 1970-х годах. [25] для замены ILS, но потерял популярность из-за внедрения спутниковых систем. В 1980-х годах США и Европа предприняли крупные усилия по созданию MLS. Но сочетание нежелания авиакомпаний инвестировать и развитие глобальной навигационной спутниковой системы (GNSS) привело к тому, что она не была принята в гражданской авиации. В то время ILS и MLS были единственными стандартизированными системами в гражданской авиации, отвечающими требованиям автоматической посадки категории III. [26] Первый MLS категории III для гражданской авиации был введен в эксплуатацию в аэропорту Хитроу в марте 2009 года и выведен из эксплуатации в 2017 году. [27]
- Транспондерная система посадки (TLS) может использоваться там, где обычная ILS не может работать или нерентабельна.
- Характеристики курсового радиомаяка с вертикальным наведением (LPV) основаны на системе расширения зоны действия (WAAS). LPV имеет минимальные значения, аналогичные ILS для соответствующим образом оборудованных самолетов. По состоянию на ноябрь 2008 г. [update]ФАУ опубликовало больше заходов на посадку LPV, чем схем ILS категории I.
- Наземная система функционального дополнения (GBAS) ( локальная система функционального дополнения в США) — это критически важная для безопасности система, которая дополняет стандартную службу позиционирования GNSS (SPS) и обеспечивает повышенные уровни обслуживания. Он поддерживает все этапы захода на посадку, посадку, вылет и наземные операции в пределах зоны покрытия УКВ. Ожидается, что GBAS сыграет ключевую роль в модернизации и обеспечении всепогодных операций в аэропортах CATI/II и III, навигации в зоне терминала, наведении на второй круг и наземных операциях. GBAS обеспечивает возможность обслуживать весь аэропорт на одной частоте (ОВЧ-передача), тогда как ILS требует отдельной частоты для каждого конца взлетно-посадочной полосы. GBAS CAT-I рассматривается как необходимый шаг на пути к более строгим операциям точного захода на посадку и посадки CAT-II/III. Технический риск внедрения GBAS задержал широкое признание технологии. ФАУ совместно с промышленностью развернуло доказуемо безопасные прототипы станций GBAS, которые смягчают влияние деформации спутникового сигнала, дифференциальной ошибки ионосферы, ошибки эфемерид и многолучевого распространения.
Будущее
[ редактировать ]Появление системы глобального позиционирования (GPS) обеспечивает альтернативный источник управления заходом на посадку самолетов. В США с 2007 года во многих регионах доступна система расширенной геостационарной навигации (WAAS) для обеспечения точного наведения в соответствии со стандартами категории I. Эквивалентная Европейская геостационарная навигационная служба (EGNOS) была сертифицирована для использования в приложениях безопасности человеческой жизни в марте. 2011. [28] Таким образом, количество установок ILS категории I может быть сокращено, однако в Соединенных Штатах не планируется поэтапный отказ от каких-либо систем категории II или категории III. [29]
Система локального расширения (LAAS) находится в стадии разработки, чтобы обеспечить минимум категории III или ниже. Офис наземной системы функционального дополнения (GBAS) ФАУ в настоящее время работает с отраслью в ожидании сертификации первых наземных станций GBAS в Мемфисе, штат Теннесси; Сидней, Австралия; Бремен, Германия; Испания; и Ньюарк, штат Нью-Джерси. Все четыре страны установили наземные станции GBAS и участвуют в мероприятиях по технической и оперативной оценке.
Команда Honeywell и FAA получила одобрение на проектирование системы, первое в мире нефедеральное одобрение США для LAAS категории I в международном аэропорту Ньюарк Либерти, эксплуатация которого состоялась в сентябре 2009 года, и одобрение эксплуатации 28 сентября 2012 года. [30]
В Норвегии система посадки на основе D-GPS , называемая SCAT-I , используется в некоторых аэропортах с короткой взлетно-посадочной полосой .
См. также
[ редактировать ]- Акронимы и сокращения в авионике
- Скорость полета
- АН/КРН-2
- Автоленд
- Система маяков слепого подхода (BABS)
- CFIT
- Дальномерное оборудование (ДМЕ)
- ЭГПВС
- Руководитель полетов , ФД
- Туман
- Джордж Вернон Холломан – пилот, совершивший первую автоматическую посадку
- Глобальная система позиционирования (GPS)
- HUD
- Правила полетов по приборам (IFR)
- Система локального расширения (LAAS)
- Характеристики курсового маяка с вертикальным наведением (LPV)
- луч Лоренца
- Микроволновая система посадки (МЛС)
- Ненаправленный маяк (NDB)
- РЛС точного захода на посадку (PAR)
- Пространственная модуляция
- Транспондерная система посадки (TLS)
- Правила визуальных полетов (VFR)
- Всенаправленный диапазон УКВ (VOR)
- Глобальная система расширения (WAAS)
Примечания
[ редактировать ]- ^ Рэгг, Дэвид В. (1973). Словарь авиации (1-е изд.). Скопа. п. 143. ИСБН 9780850451634 .
- ^ «Спутниковая навигация – подходы GPS/WAAS» .
- ^ Jump up to: а б с д «История радиопилотационных систем» (PDF) . Радарный мир . стр. 2–4.
- ^ Jump up to: а б с д и ж г Бальмус, Елена (16 апреля 2019 г.). «Введение в сигналы ILS, DME и VOR» . СкайРадар .
- ^ Jump up to: а б «Система посадки по приборам» (PDF) . Нордиан .
- ^ «Сопряжение частот курсового маяка и глиссады» . ФКС .
- ^ «Поправка 28 к DOC8400 ИКАО» . icao.int. Архивировано из оригинала 23 февраля 2014 г.
- ^ FAA, Рекомендации по критической зоне глиссады ILS (в архиве) : стр. 4, Искажение курса ILS
- ^ «Схема захода на посадку к взлетно-посадочной полосе 13 аэропорта Кай Так» . сайт Flytigersgroup.org. Архивировано из оригинала 3 марта 2009 г.
- ^ Аэропорт Кай Так#Подход к взлетно-посадочной полосе 13
- ^ Jump up to: а б Министерство транспорта и Министерство обороны (25 марта 2002 г.). «Федеральные радионавигационные системы, 2001 г.» (PDF) . Архивировано (PDF) из оригинала 14 июня 2011 г. Проверено 27 ноября 2005 г.
- ^ «АС90-108» (PDF) . Архивировано (PDF) из оригинала 11 февраля 2017 г. Проверено 27 октября 2020 г.
- ^ Приказ ФАУ 8260.3C, Стандарт США для процедур терминальных приборов (TERPS). Архивировано 13 мая 2017 г. на Wayback Machine , действует с 14 марта 2016 г., по состоянию на 4 декабря 2017 г.
- ^ Jump up to: а б «Освоение операций CAT II / CAT III» (PDF) . Аэробус. Октябрь 2001 года.
- ^ Jump up to: а б «Навигационные приборы – ILS» (PDF) . Обучение ИВАО. 31 мая 2017 г. Архивировано из оригинала (PDF) 16 июля 2017 г. . Проверено 21 июля 2018 г.
- ^ «Заказ 8400.13Д» . ФАУ. 15 мая 2018 г.
- ^ «Руководство по аэронавигационной информации» (PDF) . Транспорт Канады. 31 марта 2016. с. 282.
- ^ Приложение 10 ИКАО «Авиационная электросвязь», том 1 (Радионавигационные средства) 2.1.1 (неполная цитата)
- ^ «Приемлемые средства соответствия (AMC) и руководящие материалы (GM) для Part-SPA» (PDF) . Приложение к Решению ED 2012-019-R . EASA. 25 октября 2012 г. Архивировано из оригинала (PDF) 21 июля 2018 г. . Проверено 21 июля 2018 г.
- ^ Например, Southwest Airlines доставляет самолеты Boeing 737, оборудованные HUD, в подверженные туману аэропорты, такие как международный аэропорт Сакраменто (KSMF), позволяя рейсам взлетать, когда в противном случае они не смогли бы это сделать.
- ^ Престон, Эдмунд (ред.). «Историческая хронология ФАУ: гражданская авиация и федеральное правительство, 1926–1996» (PDF) . Репозиторий и портал доступа к открытой науке; Национальная транспортная библиотека; Министерство транспорта США . Федеральное управление гражданской авиации США. п. 9 . Проверено 5 октября 2020 г.
24 сентября 1929 года. В Митчел-Филд, штат Нью-Йорк, лейтенант армии Джеймс Х. Дулиттл стал первым пилотом, который использовал только наведение по приборам для взлета, полета по заданному курсу и приземления. Дулиттл получал указания по радиодиапазону, совмещенному с взлетно-посадочной полосой аэропорта, а радиомаркеры указывали его расстояние от взлетно-посадочной полосы. [...] Он летел в кабине с капюшоном, но его сопровождал пилот-проверщик, который мог вмешаться в чрезвычайную ситуацию.
- ^ «Самолеты приземляются по радио, когда туман скрывает поле», февраль 1931 г., «Популярная механика» в правом нижнем углу страницы.
- ^ Мола, Роджер. «История средств посадки самолетов» . Centennialofflight.net . Архивировано из оригинала 20 февраля 2014 года . Проверено 28 сентября 2010 г.
- ^ Доля рынка систем посадки инструментов (Ils), размер, глобальный региональный анализ, ключевые выводы, факторы роста, отраслевой спрос, профили ключевых игроков, будущие перспективы и прогнозы до 2025 года ( Marketwatch ) https://www.marketwatch.com/press-release /инструмент-посадка-системысилс-рыночная доля-размер-глобальный-региональный-анализ-ключевые-выводы-факторы-роста-отраслевой-спрос-ключевые-игроки-профили-будущие-перспективы-и-прогнозы-до-2025-2021 гг. -26 августа. Архивировано 21 сентября 2021 г. в Wayback Machine.
- ^ Демонстрируется микроволновая система посадки самолетов. Нью-Йорк Таймс. 20 мая 1976 года.
- ^ «Приложение 10 – Авиационная электросвязь, том I (радионавигационные средства), поправка 81» (PDF) . Архивировано (PDF) из оригинала 15 октября 2008 г.
- ^ НАТС (26 марта 2009 г.). «Первая в мире микроволновая система посадки в условиях низкой видимости введена в эксплуатацию в Хитроу» . atc-network.com. Архивировано из оригинала 7 июля 2011 года.
- ^ «Навигационная система EGNOS начинает обслуживать европейские самолеты» . Архивировано из оригинала 06 марта 2011 г. Проверено 3 марта 2011 г.
- ^ «Архивная копия» (PDF) . Архивировано из оригинала (PDF) 22 февраля 2014 г. Проверено 20 мая 2013 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка )
Ссылки
[ редактировать ]- Приложение 10 ИКАО, том 1, Радионавигационные средства, пятое издание — июль 1996 г.
- Руководство по аэронавигационной информации , ФАУ – 11 февраля 2010 г.
- Процедуры цифрового терминала , ФАУ – май 2010 г.
Внешние ссылки
[ редактировать ]- История средств посадки самолетов - Комиссия по столетию полетов США
- «Счастливые посадки в тумане», июнь 1933 г., статья в журнале «Популярная механика» о ранней установке системы в США.
- Основы ИЛС
- Учебные анимации по ILS
- Сайт, посвященный описанию ILS
- Анимационный учебник по ILS. Архивировано 4 марта 2016 г. на Wayback Machine . Иллюстрирует и описывает, как навигационные сигналы ILS отображаются на борту самолета в различных положениях, что может произойти во время безопасного захода на посадку.
- Категории ИЛС
- Джексон, Хэган Л. (январь 1947 г.). «Предложена новая система приборов для обеспечения безопасности полета и посадки» . Авиация . Том. 46, нет. 1. С. 86–88 . Проверено 14 сентября 2021 г.
| Базы данных органов управления : Национальные |
|---|