Шестиногий (робототехника)
Эта статья нуждается в дополнительных цитатах для проверки . ( май 2010 г. ) |
Шестиногого шагающего робота не следует путать с платформой Стюарта , своего рода параллельным манипулятором, используемым в робототехнике .

Шестиногий робот — это механическое транспортное средство, передвигающееся на шести ногах. Поскольку робот может быть статически устойчивым на трёх и более ногах, шестиногий робот обладает большой гибкостью в том, как он может двигаться. Если ноги станут инвалидами, робот все равно сможет ходить. Более того, не все ноги робота необходимы для устойчивости; другие ноги могут свободно перемещаться на новое место или манипулировать полезной нагрузкой.
Многие шестиногие роботы вдохновлены биологически передвижением Hexapoda роботами - – инсектоидами . Шестиноги можно использовать для проверки биологических теорий о передвижении насекомых, контроле моторики и нейробиологии.
Дизайны
[ редактировать ]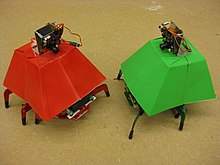
Конструкции шестиногих различаются по расположению ножек. Роботы, вдохновленные насекомыми, обычно имеют поперечную симметрию, например, робот RiSE в Карнеги-Меллоне. [ 1 ] Радиально-симметричный гексапод — это робот ATHLETE (All-Terrain Hex-Legged Extra-Terrestrial Explorer) в Лаборатории реактивного движения . [ 2 ]
Обычно отдельные ножки имеют от двух до шести степеней свободы . Ножки шестиногих обычно имеют заостренную форму, но их также можно покрыть клейким материалом, чтобы помочь роботу взбираться по стенам или колесам, чтобы робот мог быстро передвигаться по ровной земле.
Передвижение
[ редактировать ]
Чаще всего гексаподы управляются походкой, которая позволяет роботу двигаться вперед, поворачиваться и, возможно, делать шаги в сторону. Некоторые из Наиболее распространенные походки следующие:
- Переменный штатив: 3 ноги одновременно стоят на земле.
- Четвероногий.
- Ползание: двигайте только одной ногой за раз.
Походка шестиногих часто устойчива даже на слегка каменистой и неровной местности.
Движение также может быть не походкой, что означает, что последовательность движений ног не фиксирована, а скорее выбирается компьютером в ответ на воспринимаемую окружающую среду. Это может быть наиболее полезно на очень каменистой местности, но существующие методы планирования движения требуют больших вычислительных затрат.
Биологически вдохновленный
[ редактировать ]В качестве моделей выбраны насекомые, поскольку их нервная система проще, чем у других видов животных. Кроме того, сложное поведение может быть связано всего с несколькими нейронами , а путь между сенсорным входом и моторным выходом относительно короче. Поведение насекомых и нейронная архитектура используются для улучшения передвижения роботов. И наоборот, биологи могут использовать шестиногих роботов для проверки различных гипотез.
Биологически вдохновленные шестиногие роботы во многом зависят от вида насекомых , используемых в качестве модели. Таракан — и палочник два наиболее часто используемых вида насекомых; оба были тщательно изучены этологически и нейрофизиологически . В настоящее время полная нервная система неизвестна, поэтому модели обычно сочетают в себе модели разных насекомых, в том числе и других насекомых.
Походки насекомых обычно получают двумя подходами: централизованной и децентрализованной архитектурой управления. Централизованные контроллеры напрямую определяют переходы всех ветвей, тогда как в децентрализованных архитектурах шесть узлов (ветвей) соединяются в параллельную сеть; походка возникает за счет взаимодействия соседних ног.
Список роботов
[ редактировать ]См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ «Робот RiSE» . Университет Карнеги-Меллон.
- ^ «СПОРТСМЕН» . Лаборатория реактивного движения. Архивировано из оригинала 29 сентября 2006 г.
