Орнитоптер

Орнитоптер , (от греческого ornis, ornith- «птица» и pteron «крыло») — летательный аппарат который летает, взмахивая крыльями. Дизайнеры стремились имитировать взмахи крыльев птиц, летучих мышей и насекомых. Хотя машины могут различаться по форме, обычно они построены в том же масштабе, что и летающие животные. Также были построены более крупные орнитоптеры с экипажем, и некоторые из них оказались успешными. Орнитоптеры с экипажем обычно приводятся в движение двигателями или пилотом .
Ранняя история
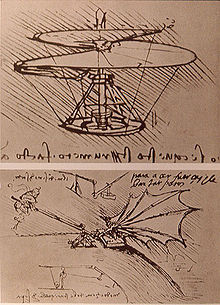
[ редактировать ]Некоторые ранние попытки полета с экипажем, возможно, были предназначены для достижения полета с машущим крылом, но, вероятно, на самом деле было достигнуто только планирование. К ним относятся предполагаемые полеты католического монаха 11-го века Эйлмера из Малмсбери (записанные в 12-м веке) и поэта 9-го века Аббаса ибн-Фирнаса (записанные в 17-м веке). [1] Роджер Бэкон , писавший в 1260 году, также был одним из первых, кто рассмотрел технологические средства полета. В 1485 году Леонардо да Винчи начал изучать полет птиц. Он понял, что люди слишком тяжелы и недостаточно сильны, чтобы летать, используя крылья, просто прикрепленные к рукам. Поэтому он нарисовал устройство, в котором летчик ложится на доску и управляет двумя большими перепончатыми крыльями, используя ручные рычаги, ножные педали и систему шкивов.
В 1841 году кузнец калфа (подмастерье) Манойло, «приехавший в Белград из Воеводины », [2] предпринял попытку полета на устройстве, описанном как орнитоптер («машущие крыльями, как у птицы»). Получив отказ властей в разрешении на взлет с колокольни Михайловского собора , он тайно забрался на крышу Думруханы (главного офиса налога на импорт) и взлетел, приземлившись в кучу снега и выжив. [3]
Первые орнитоптеры, способные летать, были построены во Франции. Жобер в 1871 году использовал резиновую ленту , чтобы привести в движение небольшую модель птицы. Альфонс Пено , Абель Юро де Вильнев и Виктор Татен также изготавливали орнитоптеры с резиновым приводом в 1870-х годах. [4] Орнитоптер Татена был, пожалуй, первым, кто применил активное скручивание крыльев, и, видимо, послужил основой для коммерческой игрушки, предложенной Пишанкуром ок. 1889. Гюстав Труве был первым, кто применил внутреннее сгорание, и его модель 1890 года пролетела расстояние 80 метров во время демонстрации для Французской академии наук. Крылья взмахивали пороховыми зарядами, приводившими в действие трубку Бурдона .
С 1884 года Лоуренс Харгрейв построил множество орнитоптеров, приводимых в движение резиновыми лентами, пружинами, паром или сжатым воздухом . [5] Он ввел использование небольших машущих крыльев, обеспечивающих тягу более крупного неподвижного крыла; это нововведение устранило необходимость в редукторе, тем самым упростив конструкцию.

Е. П. Фрост изготавливал орнитоптеры с 1870-х гг.; первые модели приводились в движение паровыми двигателями, затем в 1900-х годах был построен корабль внутреннего сгорания, достаточно большой для человека, хотя он и не летал. [6]
В 1930-х годах Александр Липпиш и Национал-социалистический летный корпус нацистской Германии сконструировали и успешно управляли серией орнитоптеров с двигателем внутреннего сгорания, используя концепцию небольших машущих крыльев Харгрейва, но с аэродинамическими улучшениями, возникшими в результате методического исследования.
Эрих фон Хольст , также работавший в 1930-х годах, добился большой эффективности и реалистичности в работе с орнитоптерами, приводившимися в движение резиновыми лентами. Он добился, пожалуй, первого успеха в создании орнитоптера с изгибающимся крылом, призванного более точно имитировать действие складывающихся крыльев птиц, хотя это не было настоящим крылом с изменяемым размахом, как у птиц. [7]
Примерно в 1960 году Персиваль Спенсер успешно управлял серией беспилотных орнитоптеров с двигателями внутреннего сгорания размером от 0,020 до 0,80 кубических дюймов (от 0,33 до 13,11 см). 3 ) водоизмещением и размахом крыльев до 8 футов (2,4 м). [8] В 1961 году Персиваль Спенсер и Джек Стивенсон управляли первым успешным дистанционно пилотируемым орнитоптером с двигателем, известным как Spencer Orniplane. [9] Орниплан имел размах крыла 90,7 дюйма (2300 мм), весил 7,5 фунтов (3,4 кг) и был оснащен двигателем объемом 0,35 кубических дюймов (5,7 см). 3 )-объемный двухтактный двигатель . Он имел бипланную конфигурацию для уменьшения раскачивания фюзеляжа. [10]
Полет с экипажем
[ редактировать ]

Орнитоптеры с экипажем делятся на две основные категории: те, которые приводятся в движение мускульными усилиями пилота (орнитоптеры с приводом от человека), и те, которые приводятся в движение двигателем.
Примерно в 1894 году Отто Лилиенталь , пионер авиации, прославился в Германии своими широко разрекламированными и успешными полетами на планерах. Лилиенталь также изучал полет птиц и проводил некоторые связанные с ним эксперименты. Он сконструировал орнитоптер, однако его полному развитию помешала его безвременная смерть 9 августа 1896 года в результате крушения планера.
В 1929 году орнитоптер с приводом от человека, спроектированный Александром Липпишем (конструктором Messerschmitt Me 163 Komet ), после буксировки пролетел расстояние от 250 до 300 метров (800–1000 футов). Поскольку использовался буксирный запуск, некоторые задаются вопросом, способен ли самолет летать самостоятельно. Липпиш утверждал, что самолет на самом деле летел, а не совершал продолжительное планирование. (Для решения этого вопроса необходимо точное измерение высоты и скорости с течением времени.) Большинство последующих орнитоптеров с приводом от человека также использовали буксирный запуск, и полеты были короткими просто потому, что человеческая мышечная сила со временем быстро уменьшается.
В 1942 году Адальберт Шмид совершил гораздо более длительный полет на орнитоптере с приводом от человека в Мюнхен-Лайме. Он преодолел расстояние 900 метров (3000 футов), сохраняя высоту 20 метров (65 футов) на протяжении большей части полета. Позже этот же самолет был оснащен мотоциклетным двигателем Sachs мощностью три лошадиных силы (2,2 кВт). С двигателем он совершал полеты продолжительностью до 15 минут. Позже Шмид построил орнитоптер мощностью 10 лошадиных сил (7,5 кВт) на основе планера Grunau-Baby IIa , который поднялся в воздух в 1947 году. Второй самолет имел машущие внешние панели крыла. [11]
Французский инженер Рене Риу посвятил три десятилетия созданию орнитоптеров с машущими крыльями. В 1905 году он изобрел свои первые модели. В 1909 году он выиграл золотую медаль на конкурсе в Лепине за уменьшенную модель. В 1913 году он работал над разработкой модели по заказу пилота Дюбуа-Риу. Испытания были прекращены в 1916 году. В 1937 году он завершил разработку Riout 102T Alérion , безусловно, самого успешного пилотируемого орнитоптера с машущим крылом до второго десятилетия 21 века. К сожалению, результаты испытаний в аэродинамической трубе не благоприятствовали продолжению проекта. [12] [13]

В 2005 году Ив Руссо был награжден Дипломом Поля Тиссандье , присуждаемым ФАИ за вклад в область авиации. Руссо предпринял свою первую попытку полета с помощью человеческих мышц с машущими крыльями в 1995 году. 20 апреля 2006 года в своей 212-й попытке ему удалось пролететь расстояние 64 метра (210 футов), что наблюдали представители Аэроклуба Франции. Во время его 213-й попытки полета порыв ветра привел к разрушению крыла, в результате чего пилот получил серьезные травмы и паралич нижних конечностей . [14]
Команда Университета Торонто Института аэрокосмических исследований под руководством профессора Джеймса ДеЛорье в течение нескольких лет работала над пилотируемым орнитоптером с двигателем. В июле 2006 года на аэродроме Bombardier в Даунсвью-парке в Торонто машина профессора ДеЛорье, UTIAS Ornithopter No.1 , совершила взлет с реактивным двигателем и полет за 14 секунд. По словам ДеЛорье, [15] реактивный самолет был необходим для продолжительного полета, но большую часть работы выполняли машущие крылья. [16]
2 августа 2010 года Тодд Райхерт из того же учреждения пилотировал орнитоптер с приводом от человека по имени Snowbird . Самолет с размахом крыла 32 метра (105 футов) и массой 42 килограмма (93 фунта) был построен из углеродного волокна , бальзы и пенопласта. Пилот сидел в небольшой кабине, подвешенной под крыльями, и ногами качал штангу, приводя в действие систему тросов, которые качали крылья вверх и вниз. Его буксировали на машине до взлета, а затем он продержался в полете почти 20 секунд. Он пролетел 145 метров (476 футов) со средней скоростью 25,6 км/ч (15,9 миль в час). [17] Подобные буксируемые полеты совершались и раньше, но улучшенный сбор данных подтвердил, что орнитоптер способен летать с автономным приводом в воздухе. [18]
Приложения для беспилотных орнитоптеров
[ редактировать ]Практическое применение основано на сходстве с птицами или насекомыми. Парки и дикая природа Колорадо использовали эти машины, чтобы помочь спасти находящегося под угрозой исчезновения Ганнисона шалфейного тетерева . Искусственный ястреб под контролем оператора заставляет тетерева оставаться на земле, чтобы их можно было поймать для изучения.
Поскольку орнитоптеры можно сделать похожими на птиц или насекомых, их можно использовать в военных целях, например, для воздушной разведки, не предупреждая врагов о том, что они находятся под наблюдением. Было запущено несколько орнитоптеров с видеокамерами на борту, некоторые из которых могут зависать и маневрировать в небольших пространствах. В 2011 году AeroVironment продемонстрировала дистанционно пилотируемый орнитоптер, напоминающий большую колибри, для возможных шпионских миссий.
Под руководством Пола Б. Маккриди ( известного как «Паутинный альбатрос ») компания AeroVironment разработала полумасштабную радиоуправляемую модель гигантского птерозавра Quetzalcoatlus nortropi для Смитсоновского института в середине 1980-х годов. Он был построен для съемок в фильме IMAX « На крыле» . Модель имела размах крыльев 5,5 метра (18 футов) и имела сложную компьютеризированную систему управления автопилотом, точно так же, как полноразмерный птерозавр полагался на свою нервно-мышечную систему, чтобы постоянно корректировать полет. [19] [20] [21]
Исследователи надеются отказаться от двигателей и механизмов современных конструкций, более точно имитируя полетные мышцы животных. Технологического исследовательского института Джорджии из Роберт Майкельсон разрабатывает возвратно-поступательную химическую мышцу для использования в микромасштабных самолетах с машущим крылом. Майкельсон использует термин « энтомоптер » для обозначения этого типа орнитоптера. [22] SRI International разрабатывает полимерные искусственные мышцы , которые также можно использовать для полета с машущими крыльями.
В 2002 году Кристер Вольф и Питер Нордин из Технологического университета Чалмерса в Швеции построили робота с машущими крыльями, который обучался технике полета. [23] Конструкция пробкового из дерева была основана на технологии машинного обучения программной , известной как стационарный линейный эволюционный алгоритм . Вдохновленное естественной эволюцией , программное обеспечение «развивается» в ответ на отзывы о том, насколько хорошо оно выполняет данную задачу. Несмотря на то, что их орнитоптер был ограничен лабораторным оборудованием, он развил поведение, обеспечивающее максимальную устойчивую подъемную силу и горизонтальное движение. [24]
С 2002 года профессор Тео ван Холтен работает над орнитоптером, построенным по принципу вертолета . Аппарат называется «орникоптер». [25] и был создан путем построения несущего винта таким образом, чтобы он не имел реактивного крутящего момента.
В 2008 году в аэропорту Амстердама Схипхол начали использовать реалистично выглядящего механического ястреба, разработанного сокольничим Робертом Мастерсом. Радиоуправляемый робот-птица используется для отпугивания птиц, которые могут повредить двигатели самолетов. [26] [27]
В 2012 году компания RoBird (ранее Clear Flight Solutions), дочерняя компания Университета Твенте, начала создавать искусственных хищных птиц (называемых RoBird®) для аэропортов, сельского хозяйства и предприятий по переработке отходов. [28] [29]
Адриан Томас и Алекс Качча основали компанию Animal Dynamics Ltd в 2015 году с целью разработки механического аналога стрекоз для использования в качестве дрона, который превзойдет квадрокоптеры. Работа финансируется Лабораторией оборонной науки и технологий, исследовательским подразделением Министерства обороны Великобритании, и ВВС США. [30]
Хобби
[ редактировать ]
Любители могут создавать и управлять своими собственными орнитоптерами. Они варьируются от легких моделей с резиновым приводом до более крупных моделей с радиоуправлением.
Модель с резиновым приводом может быть довольно простой по конструкции и конструкции. Любители соревнуются с этими моделями за самое продолжительное время полета. Начальная модель может быть довольно простой по дизайну и конструкции, но продвинутые модели для соревнований чрезвычайно сложны и сложны в сборке. Рой Уайт является национальным рекордсменом США по использованию резиновых двигателей в помещении: время полета составляет 21 минута 44 секунды. [ нужна ссылка ] .
Коммерческие игрушечные орнитоптеры с резиновым приводом, работающие в свободном полете, уже давно доступны. Первый из них был продан под именем Тим Берд в Париже в 1879 году. [31] Более поздние модели также продавались под названием Tim Bird (производство G de Ruymbeke, Франция, с 1969 года).
Коммерческие радиоуправляемые конструкции берут начало в «Чайках» Персиваля Спенсера с двигателем, разработанных примерно в 1958 году, и в работах Шона Кинкейда с конца 1990-х годов до наших дней. Крылья обычно приводятся в движение электродвигателем. Многим любителям нравится экспериментировать со своими собственными новыми конструкциями и механизмами крыльев. Возможность общаться с настоящими птицами на их территории также добавляет этому хобби огромное удовольствие. Птицы часто любопытны и следят за моделью или исследуют ее во время полета. В некоторых случаях птицы RC подвергались нападению хищных птиц , ворон и даже кошек. Более поздние более дешевые модели, такие как Dragonfly от WowWee, расширили рынок от преданных любителей до обычного рынка игрушек.
Некоторые полезные ресурсы для любителей включают «Руководство по проектированию орнитоптеров», книгу, написанную Натаном Хронистером, и веб-сайт The Ornithopter Zone, который содержит большое количество информации о создании и полетах этих моделей.
Орнитоптеры также представляли интерес как предмет одного из предыдущих мероприятий в списке мероприятий Американской общенациональной научной олимпиады . Мероприятие («Летящая птица») включало в себя создание самоходного орнитоптера в соответствии со строгими характеристиками, с баллами, начисляемыми за большое время полета и малый вес. Бонусные баллы также начислялись, если орнитоптер выглядел как настоящая птица.
Аэродинамика
[ редактировать ]Как продемонстрировали птицы, машущие крылья предлагают потенциальные преимущества в маневренности и экономии энергии по сравнению с самолетами с неподвижным крылом, а также потенциально вертикальный взлет и посадку. Было высказано предположение, что эти преимущества наиболее выражены при небольших размерах и низких скоростях полета. [32] но разработка комплексной аэродинамической теории взмахов остается нерешенной проблемой из-за сложной нелинейной природы таких нестационарных отрывных потоков. [33]
В отличие от самолетов и вертолетов, ведущие крылья орнитоптера имеют маховое или колебательное движение, а не вращательное. Как и в вертолетах, крылья обычно выполняют комбинированную функцию обеспечения подъемной силы и тяги. Теоретически машущее крыло можно установить на нулевой угол атаки при движении вверх, чтобы оно легко проходило по воздуху. Поскольку обычно машущие крылья создают как подъемную силу, так и тягу, конструкции, вызывающие сопротивление , сведены к минимуму. Эти два преимущества потенциально обеспечивают высокую степень эффективности. [ нужна ссылка ]
Конструкция крыла
[ редактировать ]Если будущие моторизованные орнитоптеры с экипажем перестанут быть «экзотическими», воображаемыми, нереальными летательными аппаратами и начнут служить людям в качестве младших членов семейства летательных аппаратов, конструкторам и инженерам придется решать не только проблемы конструкции крыльев, но и многие другие проблемы, связанные с их безопасностью. и надежный самолет. Некоторые из этих проблем, такие как устойчивость, управляемость и долговечность, необходимы для всех самолетов. Появятся и другие проблемы, характерные для орнитоптеров; оптимизация конструкции машущего крыла — лишь один из них.
Эффективный орнитоптер должен иметь крылья, способные создавать как тягу — силу, которая продвигает корабль вперед, так и подъемную силу — силу (перпендикулярную направлению полета), которая удерживает корабль в воздухе. Эти силы должны быть достаточно сильными, чтобы противостоять воздействию сопротивления и веса корабля.
Проекты орнитоптеров Леонардо были вдохновлены его изучением птиц, и в них предполагалось использовать машущее движение для создания тяги и движения вперед, необходимого для аэродинамической подъемной силы. Однако при использовании доступных в то время материалов корабль был бы слишком тяжелым и требовал бы слишком много энергии для создания достаточной подъемной силы или тяги для полета. Альфонс Пено представил идею моторного орнитоптера в 1874 году. Его конструкция имела ограниченную мощность и была неуправляемой, из-за чего ее можно было превратить в игрушку для детей. [34] Более поздние транспортные средства, такие как орнитоптеры Липпиша (1929) и Эмиэля Хартмана (1959) с приводом от человека, представляли собой планеры с приводом от двигателя, но для взлета требовали буксирного транспортного средства и, возможно, не были способны создавать достаточную подъемную силу для продолжительного полета. . Орнитоптеру Хартмана не хватало теоретической базы других, основанной на изучении полета крыльев, но он служил примером идеи орнитоптера как птичьего устройства, а не машины, которая напрямую копирует метод полета птиц. [35] [36] В 1960-е годы появились беспилотные орнитоптеры различных размеров, способные совершать и поддерживать полет, что стало ценными реальными примерами полета на механических крыльях. В 1991 году Харрис и ДеЛорье управляли первым успешным дистанционно пилотируемым орнитоптером с двигателем в Торонто, Канада. В 1999 году на основе этой конструкции поднялся в воздух пилотируемый орнитоптер, способный взлетать с ровного покрытия и совершать продолжительный полет. [35]
Машущие крылья орнитоптера и их движение по воздуху предназначены для максимизации подъемной силы, создаваемой в пределах веса, прочности материала и механической сложности. Гибкий материал крыла может повысить эффективность, сохраняя при этом простой приводной механизм. В конструкциях крыльев, в которых лонжерон выдвинут достаточно далеко вперед от профиля, так что аэродинамический центр находится позади упругой оси крыла, аэроупругая деформация заставляет крыло двигаться способом, близким к его идеальной эффективности (при этом углы тангажа отстают от смещений при падении примерно на 90 градусов.) [37] Машущие крылья увеличивают лобовое сопротивление и не так эффективны, как винтовые самолеты. В некоторых конструкциях достигается повышенная эффективность за счет приложения большей мощности при движении вниз, чем при движении вверх, как и у большинства птиц. [34]
Чтобы добиться желаемой гибкости и минимального веса, инженеры и исследователи экспериментировали с крыльями, для которых требовалось углеродное волокно, фанера, ткань и нервюры с жесткой и прочной задней кромкой. [38] Любая масса, расположенная позади хвостового оперения, снижает летно-технические характеристики крыла, поэтому там, где это возможно, используются легкие материалы и пустое пространство. Чтобы минимизировать сопротивление и сохранить желаемую форму, важен также выбор материала поверхности крыла. В экспериментах ДеЛорье гладкая аэродинамическая поверхность с крылом с двойной поверхностью более эффективна для создания подъемной силы, чем крыло с одной поверхностью.
Другие орнитоптеры не обязательно ведут себя в полете как птицы или летучие мыши. Обычно птицы и летучие мыши имеют тонкие и изогнутые крылья, обеспечивающие подъемную силу и тягу. Орнитоптеры с более тонкими крыльями имеют ограниченный угол атаки, но обеспечивают оптимальные характеристики минимального лобового сопротивления при одном коэффициенте подъемной силы. [39]
Хотя колибри летают с полностью расправленными крыльями, орнитоптеру такой полет невозможен. Если бы крыло орнитоптера полностью выпрямилось, скручивалось и махало небольшими движениями, это вызвало бы сваливание, а если бы оно скручивалось и махало очень большими движениями, оно действовало бы как ветряная мельница, вызывая неэффективную летную ситуацию. [40]
Команда инженеров и исследователей под названием «Fullwing» создала орнитоптер со средней подъемной силой более 8 фунтов, средней тягой 0,88 фунта и тяговым КПД 54%. [41] Крылья были испытаны в тихоходной аэродинамической трубе с измерением аэродинамических характеристик, показавших, что чем выше частота взмахов крыла, тем выше средняя тяга орнитоптера.
В художественной литературе
[ редактировать ]Орнитоптеры несколько раз изображались в художественной литературе, в том числе Фрэнка Герберта « Дюна» в сериале , где они являются основным видом воздушного транспорта, используемым Домом Атрейдесов в пустынном климате планеты Арракис . [42] [43]
См. также
[ редактировать ]- Циклогиро
- Автожир
- Самолет с приводом от человека
- Насекомотоптер
- Микро-воздушный транспорт
- Микромеханическое летающее насекомое
- Нано Колибри
- Винтокрылый самолет
Ссылки
[ редактировать ]- ^ Уайт, Линн. «Эйлмер из Малмсбери, авиатор одиннадцатого века: пример технологических инноваций, их контекста и традиций». Технология и культура , том 2, выпуск 2, 1961, стр. 97–111 (97–99 или 100–101).
- ^ информация, СЕРБСКИЙ (17 ноября 2014 г.). «СЕРБ ПОПЫТАЛ ЛЕТАТЬ: Это история сербского Икара, подмастерья Манойло» . СЕРБИН.ИНФО .
- ^ «Времеплов: 100 лет авиации в Сербии» . Новости онлайн .
- ^ Шанют, Октава. 1894 г., переиздано в 1998 г. Прогресс в летательных аппаратах. Дувр ISBN 0-486-29981-3
- ^ В. Хадсон Шоу и Олаф Руэн. 1977. Лоуренс Харгрейв: исследователь, изобретатель и авиационный экспериментатор . Cassell Australia Ltd., стр. 53–160.
- ^ Келли, Морис. 2006. Пар в воздухе . Книги Бена и Меча. Страницы 49–55 посвящены Фросту.
- ^ Орнитоптеры с резиновой лентой на веб-сайте Ornithopter Zone.
- ^ Полная книга моделей самолетов, космических кораблей и ракет - Луи Х. Герца, Bonanza Books, 1968.
- ^ Видео предоставлено Джеком Стивенсоном: https://www.youtube.com/watch?v=vS4Yz-VcNes.
- ^ История RC возвращена к жизни: Орнитоптер Спенсера, Фэй Стилли, февраль 1999 г., Новости моделей самолетов
- ^ Бруно Ланге, Руководство по типам немецких авиационных технологий, Кобленц, 1986. Архивировано 22 февраля 2007 г. в Wayback Machine.
- ^ Филипп Рикко, «L'Alérion Riout», журнал L'Aviation Française, декабрь 2005 г., стр. 4-11
- ^ Пирс, Уильям (20 ноября 2017 г.). «Орнитоптер Riout 102T Alérion» . Старый машинный пресс . Проверено 15 марта 2024 г.
- ^ Веб-сайт ФАИ. Архивировано 7 июля 2007 г. в Wayback Machine.
- ↑ Отчет доктора Джеймса ДеЛорье о полете Флаппера. Архивировано 13 августа 2007 г. в Wayback Machine , 8 июля 2006 г.
- ↑ Орнитоптер Университета Торонто взлетает 31 июля 2006 г.
- ^ Полет орнитопера с приводом от человека на хлопающих крыльях: Информационный бюллетень Ornithopter Zone, осень 2010 г.
- ^ «Новости команды HPO — Проект орнитоптера с приводом от человека —» . hpo.ornithopter.net .
- ^ Андерсон, Ян (10 октября 1985 г.), «Крылатая ящерица поднимается в воздух Калифорнии» , New Scientist (1477): 31 , получено 20 октября 2010 г.
- ^ Маккриди, Пол (ноябрь 1985 г.), «Великий проект птеродактиля» (PDF) , Engineering & Science : 18–24 , получено 20 октября 2010 г.
- ^ Шефтер, Джим (март 1986 г.), «Смотри! В небо! Это птица, это самолет, это птеродактиль» , Popular Science : 78–79, 124 , получено 20 октября 2010 г.
- ^ «О проекте Роберта К. Майкельсона «Энтомоптер» микроавиационного транспорта» . angel-strike.com .
- ↑ Крылатый робот учится летать New Scientist, август 2002 г.
- ^ Создание обучающегося летающего робота посредством эволюции в материалах конференции по генетическим и эволюционным вычислениям, GECCO 2002 (стр. 1279–1285). Нью-Йорк, 9–13 июля 2002 г. Морган Кауфманн. Награжден «Лучшей статьей по эволюционной робототехнике» на GECCO 2002.
- ^ Проект Ornicopter. Архивировано 25 мая 2006 г. в Wayback Machine.
- ^ Статья в голландской газете Trouw , частичный перевод:... «Так называемый «Хорк», птица с электрическим управлением, является новейшим средством отпугивания птиц. Потому что они могут нанести большой ущерб самолетам. (...) .. .это дизайн Роберта Мастерса, сокольничьего из Энсхеде ».
- ^ Фотография заархивированная 14 июня 2009 г. в Wayback Machine, с описанием на английском языке. птицы,
- ^ «Эффективный контроль над птицами — четкие решения для полетов» . www.clearflightsolutions.com .
- ^ «Ганноверский вызов» . Университет Твенте .
- ^ «Веб-сайт Animal Dynamics» . Архивировано из оригинала 7 ноября 2017 года . Проверено 7 ноября 2017 г.
- ^ «ЛЕТАЮ ВЫСОКО: Человек-птица» . Scientific American Frontiers Архив . Архивировано из оригинала 10 февраля 2007 г. Проверено 26 октября 2007 г.
- ^ Ти. Дж. Мюллер и Дж. Д. ДеЛорье, «Обзор аэродинамики микровоздушных транспортных средств», Аэродинамика неподвижного и машущего крыла для микровоздушных транспортных средств, Пол Зарчан, главный редактор, том 195, AIAA, 2001 г.
- ^ Бюхнер, AJ; Хонери, Д.; Сория, Дж. (2017). «Устойчивость и трехмерная эволюция переходного динамического срывного вихря». Журнал механики жидкости . 823 : 166–197. Бибкод : 2017JFM...823..166B . дои : 10.1017/jfm.2017.305 . S2CID 125937677 .
- ^ Jump up to: а б « Дизайн крыла орнитоптера » ДеЛорье, Джеймс Д. (1994), 10–18 (по состоянию на 30 ноября 2010 г.)
- ^ Jump up to: а б « Аэроупругое проектирование и производство эффективного крыла орнитоптера. Архивировано 4 марта 2011 г. в Wayback Machine » Бенедикт, Moble. 3–4.
- ^ «Проект Орнитоптер — История» . www.ornithopter.net .
- ^ « Разработка эффективного крыла орнитоптера » ДеЛорье, JD (1993), 152–162 (по состоянию на 27 мая 2014 г.)
- ^ « Разработка эффективного крыла орнитоптера » ДеЛорье, JD (1993), 152–162 (по состоянию на 27 мая 2014 г.)
- ^ Уоррик, Дуглас, Брет Тобальски, Дональд Пауэрс и Майкл Дикинсон. « Аэродинамика полета колибри. Архивировано 20 июля 2011 г. в Wayback Machine ». Американский институт аэронавтики и астронавтики 1–5. Веб. 30 ноября 2010 г.
- ^ Лигер, Матье, Ник Порнсин-Сирирак, Ю-Чонг Тай, Стив Хо и Чи-Минг Хо. « Обшивки с электростатическими клапанами большой площади для адаптивного управления потоком на крыльях орнитоптера. Архивировано 19 марта 2006 г. в Wayback Machine » (2002): 247–250. 30 ноября 2010 г.
- ^ ДеЛорье, Джеймс Д. « Дизайн крыла орнитоптера » 40. 1 (1994), 10–18 (по состоянию на 30 ноября 2010 г.)
- ^ Герберт, Фрэнк (1977). Дюна (изд. Berkley Medallion). Нью-Йорк. ISBN 0-425-03698-7 . ОСЛК 3582161 .
{{cite book}}: CS1 maint: отсутствует местоположение издателя ( ссылка ) - ^ Кругман, Пол (26 октября 2021 г.). «Мнение | «Дюна» — это фильм, который мы всегда хотели» . Нью-Йорк Таймс . ISSN 0362-4331 . Проверено 9 января 2022 г.
Я бы не сказал, что эта «Дюна» соответствует тому видению, которое сложилось у меня при чтении книги. Это лучше. Визуализация превосходит мое воображение — эти орнитоптеры!
Дальнейшее чтение
[ редактировать ]- Хронистер, Натан. (1999). Руководство по проектированию орнитноптеров . Опубликовано The Ornithopter Zone .
- Мюллер, Томас Дж. (2001). «Аэродинамика неподвижного и машущего крыла для микровоздушных транспортных средств». Вирджиния: Американский институт. воздухоплавания и космонавтики. ISBN 1-56347-517-0
- Адзума, Акира (2006). «Биокинетика полета и плавания». Вирджиния: Американский институт аэронавтики и астронавтики, 2-е издание. ISBN 1-56347-781-5 .
- ДеЛорье, Джеймс Д. « Разработка и испытания полномасштабного пилотируемого орнитоптера » . Канадский журнал по аэронавтике и космосу . 45. 2 (1999), 72–82. (по состоянию на 30 ноября 2010 г.).
- Уоррик, Дуглас, Брет Тобальски, Дональд Пауэрс и Майкл Дикинсон. « Аэродинамика полета колибри ». Американский институт аэронавтики и астронавтики 1–5. Веб. 30 ноября 2010 г.
- Крауч, Том Д. Самолеты Национального музея авиации и космонавтики. Четвертое изд. Стандартный планер Лилиенталя. Смитсоновский институт, 1991.
- Бильштейн, Роджер Э. Бегство в Америке 1900–1983. Первое изд. Планеры и самолеты. Балтимор, Мэриленд: Издательство Университета Джонса Хопкинса, 1984. (страницы 8–9).
- Крауч, Том Д. Уингз. История авиации от воздушных змеев до космической эры. Первое изд. Нью-Йорк: WW Norton & Company, Inc., 2003. (страницы 44–53).
- Андерсон, Джон Д. История аэродинамики и ее влияние на летательные аппараты. Кембридж: Великобритания, 1997.