неогуковское твердое тело [1] [2] — это модель гиперупругого материала , подобная закону Гука , которую можно использовать для прогнозирования нелинейного поведения напряжения и деформации материалов, подвергающихся большим деформациям . Модель была предложена Рональдом Ривлином в 1948 году с использованием инвариантов, хотя Муни уже описал версию в растянутой форме в 1940 году, а Уолл отметил эквивалентность сдвига модели Гука в 1942 году.
В отличие от линейных упругих материалов кривая растяжения неогуковского материала не является линейной . Вместо этого взаимосвязь между приложенным напряжением и деформацией изначально линейна, но в определенной точке кривая напряжения-деформации выходит на плато. Модель нео-Гука не учитывает диссипативное выделение энергии в виде тепла при деформации материала, и предполагается идеальная эластичность на всех стадиях деформации. Помимо использования для моделирования физических материалов, стабильность и сильно нелинейное поведение при сжатии сделали неогуковские материалы популярным выбором для вымышленных подходов к средам, таких как третий метод контакта со средой .
Модель нео-Гука основана на статистической термодинамике сшитых полимерных цепей и пригодна для пластмасс и резиноподобных веществ. Сшитые полимеры будут действовать по принципу неогука, поскольку первоначально полимерные цепи могут перемещаться относительно друг друга при приложении напряжения. Однако в определенный момент полимерные цепи будут растянуты до максимальной точки, которую позволят ковалентные поперечные связи, и это приведет к резкому увеличению модуля упругости материала. Модель материала Нео-Гука не предсказывает такого увеличения модуля при больших деформациях и обычно точна только для деформаций менее 20%. [3] Модель также неадекватна для двухосных напряженных состояний и была заменена моделью Муни-Ривлина .
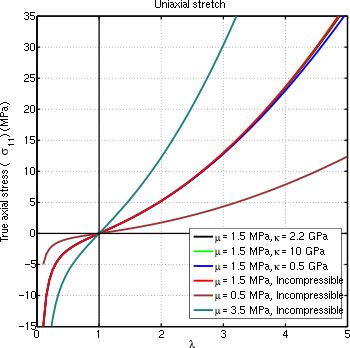
Истинное напряжение как функция одноосного растяжения, предсказанное сжимаемым неогуковским материалом для различных значений . Свойства материала соответствуют натуральному каучуку .
Для сжимаемого материала, подвергающегося одноосному растяжению, основные растяжения равны
Следовательно, истинные напряжения (Коши) для сжимаемого неогуковского материала определяются выражением
Различия в напряжениях определяются выражением
Если материал неограничен, мы имеем . Затем
Приравнивая два выражения для дает отношение к как функция , то есть,
или
Приведенное выше уравнение можно решить численно с использованием Ньютона – Рафсона итеративной процедуры поиска корня .
Сравнение экспериментальных результатов (точки) и прогнозов для закона Гука (1), твердого тела нео-Гука (2) и твердотельных моделей Муни-Ривлина (3)
При одноосном растяжении и . Поэтому,
Предполагая отсутствие сцепления по бокам, , поэтому мы можем написать
где это инженерное напряжение . Это уравнение часто записывают в альтернативных обозначениях как
Приведенное выше уравнение предназначено для истинного напряжения (отношения силы растяжения к деформированному поперечному сечению). Для инженерного напряжения уравнение имеет вид:
При небольших деформациях у нас будет:
Таким образом, эквивалентный модуль Юнга неогуковского твердого тела в одноосном растяжении равен , что соответствует линейной эластичности ( с несжимаемость).
Истинное напряжение как функция двухосного растяжения, предсказанное сжимаемым неогуковским материалом для различных значений . Свойства материала соответствуют натуральному каучуку .
В случае равноосного растяжения
Поэтому,
Различия в стрессах
Если материал находится в состоянии плоского напряжения, то и у нас есть
У нас также есть отношения между и :
или,
Это уравнение можно решить для используя метод Ньютона.
Следовательно, главные напряжения Коши для сжимаемого неогуковского материала определяются выражением
Если материал несжимаем, то а главные напряжения могут быть произвольными.
На рисунках ниже показано, что для достижения большого трехосного растяжения или сжатия необходимы чрезвычайно высокие напряжения. Аналогичным образом, относительно небольшие состояния трехосного растяжения могут вызвать развитие очень высоких напряжений в резиноподобном материале. Величина напряжения весьма чувствительна к объемному модулю, но не к модулю сдвига.
Истинное напряжение как функция равнотрехосного растяжения, предсказанное сжимаемым неогуковским материалом для различных значений . Свойства материала соответствуют натуральному каучуку .
Истинное напряжение как функция J, предсказанное с помощью сжимаемого неогуковского материала для различных значений . Свойства материала соответствуют натуральному каучуку .
Используя соотношение для напряжения Коши для несжимаемого неогуковского материала, получаем
Таким образом, неогуковское тело демонстрирует линейную зависимость касательных напряжений от сдвиговой деформации и квадратичную зависимость разности нормальных напряжений от сдвиговой деформации. Выражения для напряжения Коши для сжимаемого и несжимаемого неогуковского материала при простом сдвиге представляют одну и ту же величину и позволяют определить неизвестное давление. .
^ Гент, АН, изд., 2001, Инженерное дело с резиной , Карл Хансер Верлаг, Мюнхен.
^ Пенс, Ти Джей, и Гоу, К. (2015). О сжимаемых вариантах несжимаемого неогуковского материала. Математика и механика твердого тела , 20(2), 157–182. [1]
Arc.Ask3.Ru Номер скриншота №: 905926f7fe6756063ed5c12a57171e03__1714581540 URL1:https://arc.ask3.ru/arc/aa/90/03/905926f7fe6756063ed5c12a57171e03.html Заголовок, (Title) документа по адресу, URL1: Neo-Hookean solid - Wikipedia
Данный printscreen веб страницы (снимок веб страницы, скриншот веб страницы), визуально-программная копия документа расположенного по адресу URL1 и сохраненная в файл, имеет: квалифицированную, усовершенствованную (подтверждены: метки времени, валидность сертификата), открепленную ЭЦП (приложена к данному файлу), что может быть использовано для подтверждения содержания и факта существования документа в этот момент времени. Права на данный скриншот принадлежат администрации Ask3.ru, использование в качестве доказательства только с письменного разрешения правообладателя скриншота. Администрация Ask3.ru не несет ответственности за информацию размещенную на данном скриншоте. Права на прочие зарегистрированные элементы любого права, изображенные на снимках принадлежат их владельцам. Качество перевода предоставляется как есть. Любые претензии, иски не могут быть предъявлены. Если вы не согласны с любым пунктом перечисленным выше, вы не можете использовать данный сайт и информация размещенную на нем (сайте/странице), немедленно покиньте данный сайт. В случае нарушения любого пункта перечисленного выше, штраф 55! (Пятьдесят пять факториал, Денежную единицу (имеющую самостоятельную стоимость) можете выбрать самостоятельно, выплаичвается товарами в течение 7 дней с момента нарушения.)






























![{\displaystyle {\boldsymbol {\sigma }}={\cfrac {2}{J}}\left[{\cfrac {1}{J^{2/3}}}\left({\cfrac {\partial {W}}{\partial {\bar {I}}_{1}}}+{\bar {I}}_{1}~{\cfrac {\partial {W}}{\partial {\bar {I}}_{2}}}\right){\boldsymbol {B}}-{\cfrac {1}{J^{4/3}}}~{\cfrac {\partial {W}}{\partial {\bar {I}}_{2}}}~{\boldsymbol {B}}\cdot {\boldsymbol {B}}\right]+\left[{\cfrac {\partial {W}}{\partial J}}-{\cfrac {2}{3J}}\left({\bar {I}}_{1}~{\cfrac {\partial {W}}{\partial {\bar {I}}_{1}}}+2~{\bar {I}}_{2}~{\cfrac {\partial {W}}{\partial {\bar {I}}_{2}}}\right)\right]~{\boldsymbol {I}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a02006f31ec08f5ff11d32479fcc80ae15ffb0ea)


![{\displaystyle {\boldsymbol {\sigma }}={\cfrac {2}{J}}\left[{\cfrac {1}{J^{2/3}}}~C_{1}~{\boldsymbol {B}}\right]+\left[2D_{1}(J-1)-{\cfrac {2}{3J}}~C_{1}{\bar {I}}_{1}\right]{\boldsymbol {I}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/120f858b142ddd9ee4ad00a67d5fb3bb9b99c1ae)
![{\displaystyle {\boldsymbol {\sigma }}={\cfrac {2}{J}}\left[{\cfrac {1}{J^{2/3}}}~C_{1}~{\boldsymbol {B}}\right]+\left[2D_{1}(J-1)-{\cfrac {2C_{1}}{J}}-{\cfrac {2}{3J}}~C_{1}{\bar {I}}_{1}\right]{\boldsymbol {I}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/83d1614008549ca9e50b92d17563b2f0c2bcf4ac)

![{\displaystyle {\boldsymbol {\sigma }}={\cfrac {2C_{1}}{J}}\left[{\bar {\boldsymbol {B}}}-{\tfrac {1}{3}}{\bar {I}}_{1}{\boldsymbol {I}}\right]+2D_{1}(J-1){\boldsymbol {I}}={\cfrac {2C_{1}}{J}}\operatorname {dev} ({\bar {\boldsymbol {B}}})+2D_{1}(J-1){\boldsymbol {I}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5b584cedbf95ffa49a8e0ced00a2756041e5cc65)
![{\displaystyle {\boldsymbol {\sigma }}={\cfrac {2C_{1}}{J}}\left[{\bar {\boldsymbol {B}}}-{\tfrac {1}{3}}{\bar {I}}_{1}{\boldsymbol {I}}-{\boldsymbol {I}}\right]+2D_{1}(J-1){\boldsymbol {I}}={\cfrac {2C_{1}}{J}}\left[\operatorname {dev} ({\bar {\boldsymbol {B}}})-{\boldsymbol {I}}\right]+2D_{1}(J-1){\boldsymbol {I}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/336115e7026192205dd2f146f41c09e65b22caf8)






![{\displaystyle \sigma _{i}=2C_{1}J^{-5/3}\left[\lambda _{i}^{2}-{\cfrac {I_{1}}{3}}\ вправо]+2D_{1}(J-1)~;~~i=1,2,3}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c1e8671c7cc3313e7f11cd4b42d7d466d7b4bf69)


![{\displaystyle W=C_{1}({\bar {I}}_{1}-3)+D_{1}(J-1)^{2}=C_{1}\left[J^{-2/3}(\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2})-3\right]+D_{1}(J-1)^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c3080a7a8adbd13388160411dcb3347e301d86d0)
![{\displaystyle \lambda _{i}{\frac {\partial W}{\partial \lambda _{i}}}=C_{1}\left[-{\frac {2}{3}}J^{-5/3}\lambda _{i}{\frac {\partial J}{\partial \lambda _{i}}}(\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2})+2J^{-2/3}\lambda _{i}^{2}\right]+2D_{1}(J-1)\lambda _{i}{\frac {\partial J}{\partial \lambda _{i}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/87611cb53239ecb742121e0e9535183c69fc69b5)


![{\displaystyle {\begin{aligned}\lambda _{i}{\frac {\partial W}{\partial \lambda _{i}}}&=C_{1}\left[-{\frac {2}{3}}J^{-2/3}(\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2})+2J^{-2/3}\lambda _{i}^{2}\right]+2D_{1}J(J-1)\\&=2C_{1}J^{-2/3}\left[-{\frac {1}{3}}(\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2})+\lambda _{i}^{2}\right]+2D_{1}J(J-1)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c326c274fc12ae0344245cd5c390a34b06a6dd74)
![{\displaystyle \sigma _{i}=2C_{1}J^{-5/3}\left[\lambda _{i}^{2}-{\cfrac {I_{1}}{3}}\right]+2D_{1}(J-1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ceaecb06369b0b2869a0bb4180f929d238ef28c9)






























![{\displaystyle {\begin{aligned}\sigma _{11}&=2C_{1}\left[{\cfrac {\lambda ^{2}}{J^{5/3}}}-{\cfrac { 1}{3J}}\left(2\lambda ^{2}+{\cfrac {J^{2}}{\lambda ^{4}}}\right)\right]+2D_{1}(J- 1)\\&=\sigma _{22}\\\sigma _{33}&=2C_{1}\left[{\cfrac {J^{1/3}}{\lambda ^{4}}} -{\cfrac {1}{3J}}\left(2\lambda ^{2}+{\cfrac {J^{2}}{\lambda ^{4}}}\right)\right]+2D_{ 1}(J-1)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ad7fd4f530a9b5f2bc1a10096975392ba12ae0be)



![{\displaystyle 2C_{1}\left[{\cfrac {\lambda ^{2}}{J^{5/3}}}-{\cfrac {1}{3J}}\left(2\lambda ^{ 2}+{\cfrac {J^{2}}{\lambda ^{4}}}\right)\right]+2D_{1}(J-1)={\cfrac {2C_{1}}{J ^{5/3}}}\left(\lambda ^{2}-{\cfrac {J^{2}}{\lambda ^{4}}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/650a293ebe9af900c3775c1f566a4214c33edc38)















