углы Эйлера

Углы Эйлера — это три угла, введенные Леонардом Эйлером для описания ориентации твердого тела относительно фиксированной системы координат . [1]
Они также могут представлять ориентацию мобильной системы отсчета в физике или ориентацию общего базиса в трехмерной линейной алгебре .
Классические углы Эйлера обычно принимают угол наклона таким образом, что ноль градусов соответствует вертикальной ориентации. Альтернативные формы были позже представлены Питером Гатри Тейтом и Джорджем Х. Брайаном, предназначенными для использования в аэронавтике и технике, в которых ноль градусов представляет собой горизонтальное положение.
Эквивалентность цепных вращений
[ редактировать ]

Углы Эйлера могут быть определены элементарной геометрией или композицией вращений, связанных вращениями . Геометрическое определение показывает, что трех составных элементарных вращений (вращений вокруг осей системы координат ) всегда достаточно для достижения любого целевого кадра.
Три элементарных вращения могут быть внешними (вращения вокруг осей xyz исходной системы координат, которая считается неподвижной) или внутренними (вращения вокруг осей вращающейся системы координат XYZ , солидарные с движущимся телом, меняющим свою ориентация относительно внешней системы отсчета после каждого поворота элемента).
В разделах ниже обозначение оси с верхним индексом штриха (например, z ″) обозначает новую ось после элементарного вращения.
Углы Эйлера обычно обозначаются как α , β , γ или ψ , θ , φ . Разные авторы могут использовать разные наборы осей вращения для определения углов Эйлера или разные названия для одних и тех же углов. Поэтому любое обсуждение углов Эйлера всегда должно предваряться их определением.
Не принимая во внимание возможность использования двух различных соглашений для определения осей вращения (внутренних или внешних), существует двенадцать возможных последовательностей осей вращения, разделенных на две группы:
- Собственные углы Эйлера ( z - x - z , x - y - x , y - z - y , z - y - z , x - z - x , y - x - y )
- Углы Тейта–Брайана ( x - y - z , y - z - x , z - x - y , x - z - y , z - y - x , y - x - z ) .
Углы Тейта – Брайана также называются углами Кардана ; морские углы ; курс , высота и берег ; или рыскание, подача и крен . Иногда оба вида последовательностей называют «углами Эйлера». В этом случае последовательности первой группы называются собственными или классическими углами Эйлера.
Классические углы Эйлера
[ редактировать ]Углы Эйлера — это три угла, введенные швейцарским математиком Леонардом Эйлером (1707–1783) для описания ориентации твердого тела относительно фиксированной системы координат . [1]


Геометрическое определение
[ редактировать ]Оси исходного кадра обозначаются как x , y , z а оси повернутого кадра как X , Y , Z. , Геометрическое определение (иногда называемое статическим) начинается с определения линии узлов (N) как пересечения плоскостей xy и XY (ее также можно определить как общий перпендикуляр к осям z и Z , а затем записать как векторное произведение N = z × Z ). Используя его, три угла Эйлера можно определить следующим образом:
- (или ) — это угол со знаком между осью x и осью N ( x -соглашение — его также можно определить между y и N , называемое y -соглашением).
- (или ) — угол между осью z и Z. осью
- (или ) — угол со знаком между осью N и осью X ( x -условие).






Углы Эйлера между двумя системами отсчета определяются только в том случае, если обе системы имеют одинаковую направленность .
Соглашения по внутренним вращениям
[ редактировать ]Внутренние вращения — это элементарные вращения, которые происходят вокруг осей системы координат XYZ, прикрепленной к движущемуся телу. Поэтому они меняют свою ориентацию после каждого вращения элемента. Система XYZ вращается, а система XYZ неподвижна. Начиная с XYZ, перекрывающего xyz , можно использовать композицию из трех внутренних вращений для достижения любой целевой ориентации для XYZ .
Углы Эйлера могут быть определены внутренними вращениями. повернутая система координат XYZ Можно представить, что изначально выровнена по координате xyz , прежде чем подвергнуться трем элементарным вращениям, представленным углами Эйлера. Его последовательные ориентации можно обозначить следующим образом:
- x - y - z или x 0 - y 0 - z 0 (начальный)
- x ′- y ′- z ′ или x 1 – y 1 – z 1 (после первого вращения)
- x ″-y ″ -z ″ или x2 y2 – ) ( – z2 вращения после второго
- X - Y - Z или x 3 - y 3 - z 3 (окончательный)
Для вышеперечисленной последовательности вращений линию узлов N можно просто определить как ориентацию X после первого элементарного вращения. Следовательно, N можно просто обозначить x ′. Более того, поскольку третье вращение элемента происходит вокруг Z ориентацию Z. , оно не меняет Следовательно, Z совпадает с z ″. Это позволяет упростить определение углов Эйлера следующим образом:
- α (или φ ) представляет собой вращение вокруг оси z ,
- β (или θ ) представляет собой вращение вокруг оси x ′,
- γ (или ψ ) представляет собой вращение вокруг оси z ″.
Соглашения по внешней ротации
[ редактировать ]Внешние вращения — это элементарные вращения, которые происходят вокруг осей фиксированной системы координат xyz . Система XYZ вращается, а система XYZ неподвижна. Начиная с XYZ, перекрывающего xyz , можно использовать композицию из трех внешних вращений для достижения любой целевой ориентации для XYZ . Углы Эйлера или Тейта – Брайана ( α , β , γ ) представляют собой амплитуды этих элементарных вращений. Например, целевая ориентация может быть достигнута следующим образом (обратите внимание на обратный порядок применения угла Эйлера):
- Система XYZ вращается вокруг оси z на γ . Ось X теперь находится под углом γ по отношению к оси x .
- Система XYZ снова вращается, но на этот раз вокруг оси x на β . Ось Z теперь находится под углом β относительно Z. оси
- Система XYZ поворачивается в третий раз, снова вокруг оси z , на угол α .
В сумме три элементарных вращения происходят вокруг z , x и z . Действительно, эту последовательность часто обозначают z — x — z (или 3-1-3). Наборы осей вращения, связанные как с собственными углами Эйлера, так и с углами Тейта – Брайана, обычно называются с использованием этих обозначений (подробности см. выше).
Если каждый шаг вращения действует на вращающуюся систему координат XYZ, вращение является внутренним ( ZX'-Z'' ). Внутреннее вращение также можно обозначить 3-1-3.
Знаки, диапазоны и условности
[ редактировать ]Углы обычно определяются по правилу правой руки . А именно, они имеют положительные значения, когда представляют вращение по часовой стрелке, если смотреть в положительном направлении оси, и отрицательные значения, когда вращение происходит против часовой стрелки. Противоположное соглашение (правило левой руки) применяется реже.
О диапазонах (с использованием интервальных обозначений ):
- для α и γ диапазон определяется по модулю 2 π радиан . Например, допустимый диапазон может быть [− π , π ] .
- для β диапазон охватывает π радиан (но нельзя сказать, что он равен модулю π ). Например, это может быть [0, π ] или [− π /2, π /2] .
Углы α , β и γ определяются однозначно, за исключением особого случая, когда плоскости xy и XY идентичны, т.е. когда оси z и ось Z имеют одинаковые или противоположные направления. Действительно, если ось z и ось Z одинаковы, β = 0 и только ( α + γ однозначно определяется ) (а не отдельные значения), и, аналогично, если ось z и ось Z противоположны, β = π и только ( α − γ ) определяется однозначно (а не отдельные значения). Эти неоднозначности известны в приложениях как блокировка подвеса .
Существует шесть возможностей выбора осей вращения для правильных углов Эйлера. Во всех них первая и третья оси вращения одинаковы. Шесть возможных последовательностей:
- z 1 – x′- z ( 2 ″ (собственные вращения) или z 2 – x – z 1 внешние вращения)
- x 1 – y′- x ( 2 ″ (внутренние вращения) или x 2 – y – x 1 внешние вращения)
- y 1 – z′- ( y 2 ″ (внутренние вращения) или y 2 – z – y 1 внешние вращения)
- z 1 – y′- ( z 2 ″ (внутренние вращения) или z 2 – y – z 1 внешние вращения)
- x 1 – z′- x ( 2 ″ (собственные вращения) или x 2 – z – x 1 внешние вращения)
- y 1 – x′- y ( 2 ″ (внутренние вращения) или y 2 – x – y 1 внешние вращения)
Прецессия, нутация и собственное вращение
[ редактировать ]
Прецессия , нутация и собственное вращение (спин) определяются как движения, получаемые путем изменения одного из углов Эйлера, оставляя два других постоянными. Эти движения выражаются не через внешнюю систему отсчета или через сопутствующую вращающуюся систему тела, а в смеси. Они представляют собой смешанную систему осей вращения , где первый угол перемещает линию узлов вокруг внешней оси z , второй вращается вокруг линии узлов N и третий представляет собой собственное вращение вокруг Z , оси, закрепленной в теле. что движется.
Статическое определение подразумевает, что:
- α (прецессия) представляет собой вращение вокруг оси z ,
- β (нутация) представляет собой вращение вокруг оси N или оси x',
- γ (собственное вращение) представляет собой вращение вокруг оси Z или z″.
Если β нет равно нулю, вращения вокруг N . Как следствие, Z совпадает с z , α и γ представляют собой вращения вокруг одной и той же оси ( z ), а окончательную ориентацию можно получить одним поворотом вокруг z на угол, равный α + γ .
В качестве примера рассмотрим вершину . Верх вращается вокруг своей оси симметрии; это соответствует его собственному вращению. Он также вращается вокруг своей оси вращения, при этом его центр масс вращается вокруг оси вращения; это вращение является прецессией. Наконец, верх может раскачиваться вверх и вниз; угол наклона - это угол нутации. Тот же пример можно увидеть и в движении Земли.
Хотя все три движения могут быть представлены оператором вращения с постоянными коэффициентами в некотором кадре, они не могут быть представлены этими операторами одновременно. Учитывая систему отсчета, не более одной из них не будет коэффициентов. Только прецессию можно выразить в общих чертах как матрицу в основании пространства без зависимости от других углов.
Эти движения также ведут себя как стабилизатор. Если мы [ ВОЗ? ] предположим, что существует набор кадров, способных перемещать каждый относительно первого только на один угол, как у подвеса, будет существовать внешний фиксированный кадр, один конечный кадр и два средних кадра, которые называются «промежуточными кадрами». . Два посередине работают как два кольца подвеса, которые позволяют последнему кадру достигать любой ориентации в пространстве.
Углы Тейта – Брайана
[ редактировать ]
Второй тип формализма называется углами Тейта – Брайана в честь шотландского физика-математика Питера Гатри Тейта (1831–1901) и английского математика-прикладника Джорджа Х. Брайана (1864–1928). Это соглашение, обычно используемое в аэрокосмических приложениях, так что угол возвышения в ноль градусов соответствует горизонтальному положению. Углы Тейта – Брайана представляют собой ориентацию самолета относительно системы координат мира. При работе с другими транспортными средствами другие соглашения по осям возможны .
Определения
[ редактировать ]
Определения и обозначения, используемые для углов Тейта – Брайана, аналогичны описанным выше для собственных углов Эйлера ( геометрическое определение , определение внутреннего вращения , определение внешнего вращения ). Единственное отличие состоит в том, что углы Тейта-Брайана представляют собой вращения вокруг трех различных осей (например, x - y - z или x - y ′- z ″), тогда как правильные углы Эйлера используют одну и ту же ось как для первого, так и для третьего элементарных вращений ( например, z — x — z , или z — x’- z ″ ).
Это подразумевает другое определение линии узлов в геометрической конструкции. В случае собственных углов Эйлера он определялся как пересечение двух гомологичных декартовых плоскостей (параллельных, когда углы Эйлера равны нулю; например, xy и XY ). В случае углов Тейта – Брайана он определяется как пересечение двух негомологичных плоскостей (перпендикулярных, когда углы Эйлера равны нулю; например, xy и YZ ).
Конвенции
[ редактировать ]
Три элементарных вращения могут происходить либо вокруг осей исходной системы координат, которая остается неподвижной ( внешние вращения ), либо вокруг осей вращающейся системы координат, которая меняет свою ориентацию после каждого элементарного вращения ( внутренние вращения ).
Существует шесть возможностей выбора осей вращения для углов Тейта–Брайана. Шесть возможных последовательностей:
- x - y ′- z ″ (внутренние вращения) или z - y - x (внешние вращения)
- y - z ′- x ″ (внутренние вращения) или x - z - y (внешние вращения)
- z - x'- y ″ (внутренние вращения) или y - x - z (внешние вращения)
- x - z'- ( y ″ (внутренние вращения) или y - z - x внешние вращения)
- z - y ′- x ″ (внутреннее вращение) или x - y - z (внешнее вращение): внутренние вращения известны как: рыскание, тангаж и крен.
- y - x ′- z ″ (внутренние вращения) или z - x - y (внешние вращения)
Знаки и диапазоны
[ редактировать ]
Соглашение Тейта – Брайана широко используется в технике с различными целями. На практике существует несколько соглашений по выбору подвижных и фиксированных осей, и эти соглашения определяют знаки углов. Поэтому приметы необходимо изучать в каждом случае внимательно.
Диапазон углов ψ и φ охватывает 2 π радиан. Для θ диапазон охватывает π радиан.
Альтернативные названия
[ редактировать ]Эти углы обычно принимаются как один во внешней системе отсчета ( курс , пеленг ), один во внутренней движущейся системе координат ( банк ) и один в средней системе координат, представляющий высоту или наклон по отношению к горизонтальной плоскости, что эквивалентно линия узлов для этой цели.
Как цепные вращения
[ редактировать ]
Для самолета их можно получить тремя поворотами вокруг главных осей , если делать это в правильном порядке и начиная с системы отсчета, совпадающей с системой отсчета.
Поэтому в аэрокосмической отрасли их иногда называют рыскание, тангаж и крен . Обратите внимание, что это не будет работать, если вращения применяются в любом другом порядке или если оси самолета начинаются в любом положении, не эквивалентном системе отсчета.
Углы Тейта-Брайана, соответствующие соглашению z - y' - x ″ (собственные вращения), также известны как морские углы , поскольку их можно использовать для описания ориентации корабля или самолета, или углы Кардана , в честь итальянского математика и физик Джероламо Кардано , впервые подробно описавший карданную подвеску и карданный шарнир .
Углы данного кадра
[ редактировать ]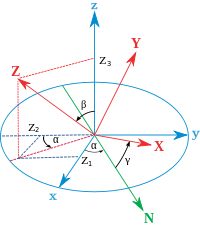
Распространенной проблемой является нахождение углов Эйлера данной системы отсчета. Самый быстрый способ их получить — записать три заданных вектора как столбцы матрицы и сравнить их с выражением теоретической матрицы (см. таблицу матриц ниже). Следовательно, можно вычислить три угла Эйлера. Тем не менее, того же результата можно достичь, избегая матричной алгебры и используя только элементарную геометрию. Здесь мы представляем результаты для двух наиболее часто используемых соглашений: ZXZ для собственных углов Эйлера и ZYX для Тейта – Брайана. Обратите внимание, что любое другое соглашение можно получить, просто изменив имена осей.
Правильные углы Эйлера
[ редактировать ]Предполагая кадр с единичными векторами ( X , Y , Z ), заданными их координатами, как на основной диаграмме, можно увидеть, что:

И, поскольку

для у нас есть


Как - двойная проекция унитарного вектора,



Есть аналогичная конструкция для , проецируя его сначала на плоскость, определяемую осью z и линией узлов. Поскольку угол между плоскостями и , это приводит к:





и, наконец, используя функцию обратного косинуса ,



Углы Тейта – Брайана
[ редактировать ]
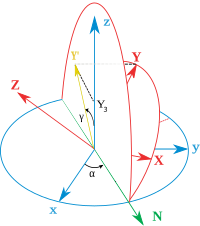
Предполагая кадр с единичными векторами ( X , Y , Z ), заданными их координатами, как на этой новой диаграмме (обратите внимание, что угол тета отрицательный), можно увидеть, что:

Как и прежде,

для у нас есть


способом, аналогичным предыдущему:


Ищем выражения, похожие на предыдущие:



Последние замечания
[ редактировать ]Обратите внимание, что функции обратного синуса и косинуса дают два возможных значения аргумента. В этом геометрическом описании справедливо только одно из решений. Когда углы Эйлера определяются как последовательность вращений, все решения могут быть действительными, но внутри диапазонов углов будет только одно. Это связано с тем, что последовательность поворотов для достижения целевого кадра не уникальна, если диапазоны не определены ранее. [2]
В вычислительных целях может быть полезно представлять углы с помощью atan2 ( y , x ) . Например, в случае правильных углов Эйлера:


Преобразование в другие представления ориентации
[ редактировать ]Углы Эйлера — один из способов представления ориентации. Есть и другие, и можно переходить к другим соглашениям и обратно. всегда требуются три параметра Для описания ориентации в трехмерном евклидовом пространстве . Их можно задать несколькими способами, одним из которых являются углы Эйлера; см . в диаграммах SO(3) другие .
Наиболее распространенными представлениями ориентации являются матрицы вращения , угол оси и кватернионы , также известные как параметры Эйлера-Родригеса , которые обеспечивают еще один механизм представления трехмерных вращений. Это эквивалентно описанию специальной унитарной группы.
Выражение вращения в 3D в виде единичных кватернионов вместо матриц имеет некоторые преимущества:
- Объединение вращений происходит быстрее в вычислительном отношении и более стабильно в цифровом отношении.
- Извлечение угла и оси вращения проще.
- Интерполяция более проста. См., например, slerp .
- Кватернионы не страдают от блокировки кардана, как углы Эйлера.
В любом случае вычисление матрицы вращения является первым шагом для получения двух других представлений.
Матрица вращения
[ редактировать ]Любая ориентация может быть достигнута путем составления трех элементарных вращений, начиная с известной стандартной ориентации. Эквивалентно, любую матрицу вращения R можно разложить как произведение трех элементарных матриц вращения. Например: - это матрица вращения, которая может использоваться для представления композиции внешних вращений вокруг осей z , y , x (в этом порядке) или композиции внутренних вращений вокруг осей x - y ′- z ″ (в этом порядке). Однако как определение элементарных матриц вращения X , Y , Z , так и порядок их умножения зависят от выбора, сделанного пользователем в отношении определения как матриц вращения, так и углов Эйлера (см., например, Неоднозначности в определении вращения матрицы ). К сожалению, в разных контекстах пользователи принимают разные наборы соглашений. Следующая таблица была построена в соответствии с этим набором соглашений:

- Каждая матрица предназначена для работы путем предварительного умножения векторов-столбцов. (см. Неясности в определении матриц вращения )
- Каждая матрица предназначена для представления активного вращения (предполагается, что составляющая и составленная матрицы действуют на координаты векторов, определенных в исходной фиксированной системе отсчета, и дают в результате координаты повернутого вектора, определенного в той же системе отсчета).
- Каждая матрица предназначена для представления, во-первых, композиции собственных вращений (вокруг осей вращающейся системы отсчета) и, во-вторых, композиции трех внешних вращений (что соответствует конструктивной оценке R-матрицы путем умножения трех истинно элементарные матрицы, в обратном порядке).
- правые Принимаются системы отсчета, и правило правой руки используется для определения знака углов α , β , γ .

Для простоты в следующей таблице матричных продуктов используется следующая номенклатура:
- X , Y , Z — матрицы, представляющие элементарные повороты вокруг осей x , y , z фиксированной системы координат (например, X α представляет поворот вокруг x на угол α ).
- s и c синус и косинус (например, sα α представляет собой синус представляют ).
| Правильные углы Эйлера | Углы Тейта – Брайана |
|---|---|












Эти табличные результаты доступны во многих учебниках. [3] Для каждого столбца последняя строка представляет собой наиболее часто используемое соглашение.
Чтобы изменить формулы пассивного вращения (или найти обратное активное вращение), транспонируйте матрицы (тогда каждая матрица преобразует начальные координаты вектора, остающегося фиксированным, в координаты того же вектора, измеренного во повернутой системе отсчета; та же ось вращения, та же углы, но теперь вращается система координат, а не вектор).
В следующей таблице приведены формулы для углов α , β и γ из элементов матрицы вращения. . [4]

| Правильные углы Эйлера | Углы Тейта – Брайана | ||
|---|---|---|---|
























Характеристики
[ редактировать ]Углы Эйлера образуют диаграмму для всей SO(3) , специальной ортогональной группы вращений в трехмерном пространстве. Карта гладкая, за исключением сингулярности в стиле полярных координат вдоль β = 0 . См. диаграммы SO(3) для более полного рассмотрения.
Пространство вращений вообще называют « Гиперсферой вращений », хотя это неправильное название: группа Spin(3 изометрична ) гиперсфере S. 3 , но пространство вращения SO(3) вместо этого изометрично реальному проективному пространству RP 3 которое представляет собой 2-кратное фактор-пространство гиперсферы. Эта двусмысленность 2 к 1 и есть математическое происхождение вращения в физике .
Аналогичное разложение по трем углам применимо к SU(2) , специальной унитарной группе вращений в комплексном двумерном пространстве, с той разницей, что β находится в диапазоне от 0 до 2 π . Их еще называют углами Эйлера.
Мера Хаара для SO(3) в углах Эйлера задается параметризацией угла Хопфа SO(3): , [5] где параметризовать , пространство осей вращения.



Например, чтобы генерировать равномерно рандомизированные ориентации, пусть α и γ будут однородными от 0 до 2 π , пусть z будет равномерным от −1 до 1 и пусть β = arccos( z ) .
Геометрическая алгебра
[ редактировать ]Другие свойства углов Эйлера и вращений в целом можно найти из геометрической алгебры , абстракции более высокого уровня, в которой кватернионы являются четной подалгеброй. Главный инструмент геометрической алгебры — ротор. где угол поворота , - ось вращения (унитарный вектор) и — псевдоскаляр (тривектор в )
![{\displaystyle \mathbf {R} =[\cos(\theta/2)-Iu\sin(\theta/2)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ccaf9643d65a54a5bd1b4d962d07f605c9c67648)




Высшие измерения
[ редактировать ]Можно определить параметры, аналогичные углам Эйлера, в размерностях больше трех. [6] [7] [ ненадежный источник? ] В четырех измерениях и выше понятие «вращение вокруг оси» теряет смысл и вместо этого становится «вращением в плоскости». Количество углов Эйлера, необходимых для представления группы SO( n ), равно n ( n − 1)/2 , что равно количеству плоскостей, содержащих две различные координатные оси в n -мерном евклидовом пространстве.
В SO(4) матрица вращения определяется двумя единичными кватернионами и, следовательно, имеет шесть степеней свободы, по три от каждого кватерниона.
Приложения
[ редактировать ]Транспортные средства и движущиеся рамы
[ редактировать ]Их главное преимущество перед другими описаниями ориентации заключается в том, что их можно измерить непосредственно с помощью подвеса, установленного в транспортном средстве. Поскольку гироскопы сохраняют свою ось вращения постоянной, углы, измеренные в гироскопической системе координат, эквивалентны углам, измеренным в лабораторной системе координат. Таким образом, гироскопы используются для определения фактической ориентации движущегося космического корабля, а углы Эйлера поддаются непосредственному измерению. Собственный угол поворота невозможно определить по одному подвесу, поэтому в космическом корабле должно быть несколько подвесов. Обычно их как минимум три для резервирования. Это также имеет отношение к известной проблеме блокировки карданного подвеса в машиностроении . [8]
При изучении твердых тел в целом называют систему xyz координат пространства и XYZ системы координаты тела . Пространственные координаты считаются неподвижными, а координаты тела считаются встроенными в движущееся тело. Расчеты, включающие ускорение , угловое ускорение , угловую скорость , угловой момент и кинетическую энергию , часто проще всего выполнять в координатах тела, потому что тогда тензор момента инерции не меняется во времени. Если также диагонализировать тензор момента инерции твердого тела (с девятью компонентами, шесть из которых независимы), то мы получим набор координат (называемый главными осями), в котором тензор момента инерции имеет только три компонента.
Угловая скорость твердого тела принимает простую форму с помощью углов Эйлера в движущейся системе отсчета. Кроме того, уравнения твердого тела Эйлера проще, поскольку тензор инерции в этой системе отсчета постоянен.
Кристаллографическая текстура
[ редактировать ]
В материаловедении кристаллографическую текстуру (или предпочтительную ориентацию) можно описать с помощью углов Эйлера. При анализе текстуры углы Эйлера дают математическое описание ориентации отдельных кристаллитов внутри поликристаллического материала, что позволяет количественно описать макроскопический материал. [10] Наиболее распространенное определение углов принадлежит Бунге и соответствует соглашению ZXZ . Однако важно отметить, что приложение обычно включает в себя преобразования осей тензорных величин, т.е. пассивные вращения. Таким образом, матрица, соответствующая углам Бунге-Эйлера, представляет собой транспонирование матрицы, показанной в таблице выше. [11]
Другие
[ редактировать ]
Углы Эйлера, обычно в соглашении Тейта-Брайана, также используются в робототехнике для обозначения степеней свободы запястья . они также используются в электронной системе контроля устойчивости Аналогичным образом .
Системы управления огнем орудий требуют корректировок углов расположения орудий (азимута и места), чтобы компенсировать наклон палубы (тангаж и крен). В традиционных системах стабилизирующий гироскоп с вертикальной осью вращения корректирует наклон палубы и стабилизирует оптические прицелы и антенну радара. Однако стволы орудий направлены в направлении, отличном от линии визирования на цель, чтобы предвидеть движение цели и падение снаряда, среди других факторов. Орудийные установки кренятся и наклоняются вместе с плоскостью палубы, но также требуют стабилизации. Порядки орудий включают углы, рассчитанные на основе данных вертикального гироскопа, и эти вычисления включают углы Эйлера.
Углы Эйлера также широко используются в квантовой механике углового момента. В квантовой механике явные описания представлений SO(3) очень важны для вычислений, и почти вся работа была выполнена с использованием углов Эйлера. В ранней истории квантовой механики, когда физики и химики резко отрицательно реагировали на абстрактные теоретико-групповые методы (так называемые группенпесты ), опора на углы Эйлера также была важна для фундаментальных теоретических работ.
Многие мобильные вычислительные устройства содержат акселерометры , которые могут определять углы Эйлера этих устройств относительно гравитационного притяжения Земли. Они используются в таких приложениях, как игры, моделирование пузырьковых уровней и калейдоскопы . [ нужна ссылка ]
Библиотеки компьютерной графики, такие как Three.js, используют их для наведения камеры.
См. также
[ редактировать ]- 3D-проекция
- Представление угла оси
- Преобразование между кватернионами и углами Эйлера
- Цепные вращения Давенпорта
- Теорема Эйлера о вращении
- Блокировка подвеса
- Кватернион
- Кватернионы и пространственное вращение
- Формализмы вращения в трех измерениях
- Сферическая система координат
Ссылки
[ редактировать ]- ^ Перейти обратно: а б Новые комментарии Петрополитической академии наук 20, 1776 г., стр. 189–207 (Е478) PDF
- ^ Грегори Г. Слабо, Вычисление углов Эйлера по матрице вращения
- ^ Например, Приложение I (стр. 483) из: Ройтмайр, Карлос М.; Ходжес, Дьюи Х. (2016). Динамика: теория и применение метода Кейна (1-е изд.). Издательство Кембриджского университета. ISBN 978-1107005693 .
- ^ Хендерсон, DM (9 июня 1977 г.). Углы Эйлера, кватернионы и матрицы преобразования для анализа космического корабля (Технический отчет). НАСА. стр. 12–24.
- ^ Ершова А.; Джайн, С.; Лаваль, С.М.; Митчелл, Джей Си (2010). «Генерация равномерных инкрементных сеток на SO (3) с использованием расслоения Хопфа» . Международный журнал исследований робототехники . 29 (7). Раздел 8 – Вывод параметризации Хопфа. дои : 10.1177/0278364909352700 . ПМК 2896220 . ПМИД 20607113 .
- ^ Хоффман, Д.К. (1972), Обобщение углов Эйлера на N-мерные ортогональные матрицы , [J. Математика. Физ. 13, 528–533], doi : 10.1063/1.1666011.
- ^ (на итальянском языке) Обобщение углов Эйлера на n -мерные реальные пространства
- ^ Связь между углами Эйлера и карданной подвеской объясняется в гл. 11.7 следующего учебника: У. Крей, А. Оуэн, Базовая теоретическая физика – краткий обзор , Нью-Йорк, Лондон, Берлин, Гейдельберг, Springer (2007).
- ^ Лисс К.Д., Бартельс А., Шрейер А., Клеменс Х. (2003). «Рентгеновские лучи высокой энергии: инструмент для передовых объемных исследований в области материаловедения и физики» . Текстуры Микроструктура . 35 (3/4): 219–52. дои : 10.1080/07303300310001634952 .
- ^ Кокс, УФ; Томе, Китай; Венк, Х.-Р. (2000), Текстура и анизотропия: предпочтительные ориентации в поликристаллах и их влияние на свойства материалов , Кембридж , ISBN 978-0-521-79420-6
- ^ Бунге, Х. (1993), Анализ текстуры в материаловедении: математические методы , Cuvillier Verlag , ASIN B0014XV9HU
Библиография
[ редактировать ]- Биденхарн, LC; Лук, JD (1981), Угловой момент в квантовой физике , Ридинг, Массачусетс: Аддисон – Уэсли , ISBN 978-0-201-13507-7
- Гольдштейн, Герберт (1980), Классическая механика (2-е изд.), Ридинг, Массачусетс: Аддисон-Уэсли, ISBN 978-0-201-02918-5
- Грей, Эндрю (1918), Трактат о гиростатике и вращательном движении , Лондон: Macmillan (опубликовано в 2007 г.), ISBN 978-1-4212-5592-7
- Роуз, Мэн (1957), Элементарная теория углового момента , Нью-Йорк, Нью-Йорк: John Wiley & Sons (опубликовано в 1995 г.), ISBN 978-0-486-68480-2
- Саймон, Кейт (1971), Механика , Ридинг, Массачусетс: Аддисон-Уэсли, ISBN 978-0-201-07392-8
- Ландау, LD ; Лифшиц, Э.М. (1996), Механика (3-е изд.), Оксфорд: Баттерворт-Хайнеманн, ISBN 978-0-7506-2896-9
Внешние ссылки
[ редактировать ]- «Углы Эйлера» , Математическая энциклопедия , EMS Press , 2001 [1994]
- Вайсштейн, Эрик В. «Углы Эйлера» . Математический мир .
- Дэвид Эберли. Формулы угла Эйлера , Геометрические инструменты
- Интерактивное руководство по углам Эйлера доступно по адресу https://www.mecademic.com/en/how-is-orientation-in-space-represented-with-euler-angles.
- EulerAngles - приложение для iOS для трехмерной визуализации трех вращений, связанных с углами Эйлера.
- Библиотека ориентации - «orilib», набор процедур для манипуляций с вращением / ориентацией, включая специальные инструменты для ориентации кристаллов.
- Онлайн-инструмент для преобразования матриц вращения, доступный в конвертере вращения (числовое преобразование)
- Онлайн-инструмент для преобразования матриц символьного вращения (устаревший, но все еще доступный на Wayback Machine ) конвертер символьного вращения
- Вращение, отражение и смена кадра: ортогональные тензоры в вычислительной инженерной механике , IOP Publishing
- Углы Эйлера, кватернионы и матрицы преобразования для анализа космических кораблей , НАСА
| Базы данных органов управления : Национальные |
|---|