Телеробототехника

Телеробототехника — это область робототехники, связанная с управлением полуавтономными роботами на расстоянии, в основном с использованием телевидения , беспроводных сетей (таких как Wi-Fi , Bluetooth и Deep Space Network ) или привязанных соединений. Это комбинация двух основных подполей: телеоперации и телеприсутствия .
Телеоперация
[ редактировать ]Телеуправление означает работу машины на расстоянии. По значению оно похоже на фразу «дистанционное управление», но обычно встречается в исследовательской, академической и технической среде. Чаще всего оно ассоциируется с робототехникой и мобильными роботами, но может применяться к целому ряду обстоятельств, при которых устройством или машиной управляет человек на расстоянии. [1]

Телеоперация — это наиболее стандартный термин, используемый как в исследовательских, так и в технических сообществах для обозначения операции на расстоянии. Это противоположность « телеприсутствию », которое относится к подмножеству телероботических систем, оснащенных иммерсивным интерфейсом, так что оператор чувствует себя присутствующим в удаленной среде, проецируя свое присутствие через удаленного робота. Одной из первых систем телеприсутствия, которая позволяла операторам чувствовать себя в удаленной среде с помощью всех основных чувств (зрения, звука и осязания), была система Virtual Fixtures, разработанная в исследовательских лабораториях ВВС США в начале 1990-х годов. Система позволяла операторам выполнять ловкие задачи (вставлять колышки в отверстия) удаленно, так что оператор чувствовал, как будто он или она вставляет колышки, хотя на самом деле эту задачу удаленно выполняет робот. [2] [3] [4]
Телеманипулятор телеоператор (или ) — устройство , которым дистанционно управляет человек-оператор. В простых случаях командные действия управляющего оператора непосредственно соответствуют действиям в управляемом устройстве, как, например, в радиоуправляемой модели самолета или привязном глубоководном аппарате. Если задержки связи делают прямое управление непрактичным (например, удаленный планетоход) или желательно снизить рабочую нагрузку оператора (например, в дистанционно управляемом шпионском или штурмовике), устройство не будет управляться напрямую, вместо этого ему будет приказано следовать за указанный путь. На более высоком уровне сложности устройство может работать несколько независимо в таких вопросах, как обход препятствий, что также обычно используется в планетоходах.
Устройства, позволяющие оператору управлять роботом на расстоянии, иногда называют телехеричной робототехникой.
Двумя основными компонентами телеробототехники и телеприсутствия являются приложения визуального контроля и управления. Удаленная камера обеспечивает визуальное представление изображения робота. Размещение роботизированной камеры в перспективе, обеспечивающей интуитивное управление, является недавним методом, который, хотя и основан на научной фантастике ( Роберта А. Хайнлайна рассказ « Уолдо » 1942 года), не оказался плодотворным, поскольку скорость, разрешение и пропускная способность были достигнуты лишь недавно. адекватно задаче эффективного управления камерой робота. Используя наголовный дисплей , можно облегчить управление камерой, отслеживая положение головы, как показано на рисунке ниже.
Это работает только в том случае, если пользователь чувствует себя комфортно с задержкой системы, задержкой реакции на движения, визуальным представлением. Любые проблемы, такие как неадекватное разрешение, задержка видеоизображения, задержка механической и компьютерной обработки движения и реакции, а также оптические искажения, вызванные объективом камеры и линзами дисплея, установленными на голове, могут вызвать у пользователя « болезнь симулятора », то есть усугубляется отсутствием вестибулярной стимуляции при зрительном представлении движения.
Несоответствие движений пользователя, такое как ошибки регистрации, задержка реакции на движение из-за чрезмерной фильтрации, недостаточное разрешение для небольших движений и низкая скорость, могут способствовать этим проблемам.
Та же самая технология может управлять роботом, но тогда проблемы с координацией глаз и рук становятся еще более распространенными в системе, а напряжение или разочарование пользователя могут затруднить использование системы. [ нужна ссылка ]
Тенденция создания роботов заключалась в минимизации степеней свободы , поскольку это уменьшает проблемы управления. Недавние улучшения в компьютерах сместили акцент на большую степень свободы, позволяя роботизированным устройствам казаться более интеллектуальными и более человечными в своих движениях. Это также обеспечивает более прямое дистанционное управление, поскольку пользователь может управлять роботом своими движениями . [5]
Интерфейсы
[ редактировать ]Интерфейс телеробота может быть таким же простым, как обычный интерфейс ММК (монитор-мышь-клавиатура). Хоть это и не захватывающе, но стоит недорого. Телеробототехника, управляемая подключением к Интернету, часто относится к этому типу. Ценной модификацией ММК является джойстик, обеспечивающий более интуитивную схему навигации при планарном движении робота.
В специализированных установках телеприсутствия используется головной дисплей с одним или двумя глазами, а также эргономичный интерфейс с джойстиком и соответствующими кнопками, ползунками и триггерными элементами управления.
Другие интерфейсы объединяют полностью захватывающие интерфейсы виртуальной реальности и видео в реальном времени вместо изображений, созданных компьютером. [6] Другим примером может быть использование всенаправленной беговой дорожки с иммерсивной системой отображения, чтобы робот управлялся идущим или бегущим человеком. Дополнительные модификации могут включать отображение объединенных данных, таких как инфракрасное тепловидение, оценка угроз в реальном времени или схемы устройств. [ нужна ссылка ]
Приложения
[ редактировать ]Космос
[ редактировать ]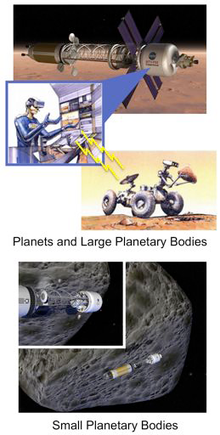
За исключением программы «Аполлон» , большая часть космических исследований проводилась с помощью телероботизированных космических зондов . Например, большая часть космической астрономии проводится с помощью телероботов- телескопов . Например, российская миссия «Луноход-1» доставила на Луну дистанционно управляемый вездеход, которым управляли в реальном времени (с задержкой в 2,5 секунды на скорости света) люди-операторы на земле. В программах роботизированного исследования планет используются космические корабли, которые программируются людьми на наземных станциях, что, по сути, обеспечивает форму телероботизированной работы с длительной задержкой. Недавние заслуживающие внимания примеры включают марсоходы для исследования Марса (MER) и Curiosity. вездеход. В случае миссии MER космический корабль и марсоход работали по сохраненным программам, а водители марсохода на земле программировали работу на каждый день. Международная космическая станция (МКС) использует двурукий телеманипулятор под названием Dextre . Совсем недавно появился робот-гуманоид Робонавт. [8] был добавлен на космическую станцию для экспериментов с телероботами.
НАСА предложило использовать высокопроизводительные телеробототехнические системы [9] для будущего исследования планет с использованием человеческого исследования с орбиты. В концепции исследования Марса , предложенной Лэндисом , может быть осуществлена предварительная миссия на Марс , в которой человеческий корабль доставит экипаж на Марс, но останется на орбите, а не приземлится на поверхность, в то время как высокопроизводительный удаленный робот будет работать в реальном времени. время на поверхности. [10] Такая система выйдет за рамки простой робототехники с длительной задержкой и перейдет в режим виртуального телеприсутствия на планете. Одно исследование этой концепции, концепция исследования человека с использованием роботизированных операций в реальном времени (HERRO), предположило, что такая миссия может быть использована для исследования самых разных планетарных направлений. [7]
Телеприсутствие и видеоконференции
[ редактировать ]
Распространенность высококачественных видеоконференций с использованием мобильных устройств, планшетов и портативных компьютеров привела к резкому росту числа роботов телеприсутствия, которые помогают лучше ощущать удаленное физическое присутствие для общения и совместной работы в офисе, дома, школе и т. д., когда это невозможно. быть там лично. Робот-аватар может двигаться или оглядываться по команде удаленного человека. [11] [12]
Существовало два основных подхода, каждый из которых использует видеоконференцию на дисплее.
- Настольные роботы телеприсутствия обычно устанавливают телефон или планшет на моторизованную настольную подставку, чтобы удаленный человек мог осматривать удаленную среду, поворачивая и наклоняя дисплей.
- Управляемые роботы телеприсутствия обычно содержат дисплей (встроенный или отдельный телефон или планшет), установленный на роуминговой базе. Более современные роуминговые роботы телеприсутствия могут иметь возможность работать автономно. Роботы могут планировать пространство и избегать препятствий, перемещаясь между комнатами и док-станциями. [13]
Традиционные системы видеоконференцсвязи и комнаты телеприсутствия обычно предлагают камеры с возможностью поворота, наклона и масштабирования с управлением на дальнем конце. Возможность удаленного пользователя поворачивать голову устройства и естественным образом смотреть по сторонам во время встречи часто рассматривается как самая сильная особенность робота телеприсутствия. По этой причине разработчики создали новую категорию настольных роботов телеприсутствия, которые концентрируются на этой самой сильной функции, чтобы создать гораздо более дешевого робота. Настольные роботы телеприсутствия, также называемые «роботами с головой и шеей». [14] позволяют пользователям осмотреться во время встречи, и они достаточно малы, чтобы их можно было переносить с места на место, что устраняет необходимость в удаленной навигации. [15]
Некоторые роботы телеприсутствия очень полезны некоторым детям с хроническими заболеваниями, которые не могут регулярно посещать школу. Новейшие инновационные технологии способны объединять людей и позволяют им оставаться на связи друг с другом, что существенно помогает им преодолеть одиночество. [16]
Морские применения
[ редактировать ]Морские телеуправляемые аппараты (ROV) широко используются для работы в воде, слишком глубокой или слишком опасной для дайверов. Они ремонтируют морские нефтяные платформы и прикрепляют тросы к затонувшим кораблям, чтобы их поднять. Обычно они прикрепляются тросом к центру управления на надводном корабле. Место крушения « Титаника» было исследовано с помощью ROV, а также судна с экипажем.
Телемедицина
[ редактировать ]Кроме того, проводится множество исследований телероботов в области медицинского оборудования и минимально инвазивных хирургических систем. С помощью роботизированной хирургической системы хирург может работать внутри тела через крошечные отверстия, достаточно большие для манипулятора, без необходимости открывать грудную полость, чтобы пропустить руки внутрь.
Роботы экстренного реагирования и правоохранительных органов
[ редактировать ]NIST поддерживает набор стандартов испытаний, используемых для реагирования на чрезвычайные ситуации. [17] и телеробототехнические системы правоохранительных органов. [18] [19]
Другие приложения
[ редактировать ]Дистанционные манипуляторы используются для работы с радиоактивными материалами.
Телеробототехника использовалась в инсталляциях ; Telegarden — пример проекта, в котором пользователи управляли роботом через Интернет.
См. также
[ редактировать ]- Астроботическая технология
- Dragon Runner — военный робот, созданный для городских боев.
- Луноход
- Медицинский робот
- Военный робот
- Автомобиль с дистанционным управлением
- Дистанционный манипулятор
- Робонавт
- Умное устройство
- Духовный вездеход
- Снегоочиститель робот
- UWA Телеробот
Ссылки
[ редактировать ]- ^ Корли, Анн-Мари (сентябрь 2009 г.). «Реальность роботов-суррогатов» . Spectrum.ieee.com. Архивировано из оригинала 15 апреля 2013 года . Проверено 19 марта 2013 г.
- ^ Розенберг, Л.Б. (1992). «Использование виртуальных приспособлений в качестве наложений на восприятие для повышения производительности оператора в удаленных средах». Технический отчет AL-TR-0089, Лаборатория Армстронга ВВС США, авиабаза Райт-Паттерсон, Огайо, 1992 г.
- ^ Розенберг, Л.Б. (1993). «Виртуальные приспособления: перцептивные наложения для манипуляций с телероботами». В Proc. ежегодного международного конкурса IEEE. Симпозиум по виртуальной реальности (1993) : стр. 76–82.
- ^ Розенберг, Луи Б. «Виртуальные приспособления как инструменты повышения производительности оператора в средах телеприсутствия» . Телеманипуляторная техника и космическая телеробототехника . (1993) номер документа : 10.1117/12.164901 .
- ^ Миллер, Натан и др. « Захват движения на основе инерционного зондирования для беспрепятственной телеоперации гуманоидов ». Роботы-гуманоиды, 2004 г. 4-я Международная конференция IEEE/RAS. Том. 2. ИИЭР, 2004.
- ^ Бурдеа, Григоре К. « Приглашенный обзор: синергия между виртуальной реальностью и робототехникой ». Транзакции IEEE по робототехнике и автоматизации 15.3 (1999): 400-410.
- ^ Jump up to: а б Шмидт, Г.Р.; Лэндис, Джорджия; Олесон, SR «Миссии HERRO на Марс и Венеру с использованием телероботных исследований с орбиты» (PDF) . Архивировано из оригинала (PDF) 13 мая 2013 года . Проверено 15 ноября 2012 г. ; см. также: Олесон, СР; Лэндис, Джорджия; Макгуайр, М.; Шмидт, Г. Р. (2012). «Миссии HERRO на Марс с использованием телероботного исследования поверхности с орбиты» (PDF) . Журнал Британского межпланетного общества . Архивировано из оригинала (PDF) 17 февраля 2013 г. и HERRO (по состоянию на 15 ноября 2012 г.).
- ^ «Домашняя страница Робонавта» . НАСА . Проверено 27 мая 2011 г.
- ^ Адам Манн, « Почти там: почему будущее космических исследований не то, что вы думаете» , Wired , 12 ноября 2012 г. (по состоянию на 15 ноября 2012 г.).
- ^ Г. А. Лэндис, «Телеоперация с орбиты Марса: предложение по исследованию человеком», Acta Astronautica, Vol. 61, № 1, стр. 59-65; представлено в виде документа IAC-04-IAA.3.7.2.05, 55-й Конгресс Международной астронавтической федерации, Ванкувер, Британская Колумбия, 4–8 октября 2004 г.
- ^ Рик Лербаум, « Атака роботов телеприсутствия! », InformationWeek , 11 января 2013 г. (по состоянию на 8 декабря 2013 г.).
- ^ Джейкоб Уорд, « Я робот-босс », Popular Science , 28 октября 2013 г.
- ^ Хониг, Зак (17 марта 2014 г.). «Устройство телеприсутствия Ava 500 от iRobot уже в продаже (обновление: 69 500 долларов!!)» . Engadget. Архивировано из оригинала 14 июля 2014 года . Проверено 4 июля 2014 г.
- ^ Джон Биггс, « Revolve Robotics объявляет о Kubi, установке телеприсутствия, которая работает как ваша шея », «Tech Crunch», 6 декабря 2012 г.
- ^ Сэнфорд Дикерт и Дэвид Малдоу, эсквайр, « Состояние отрасли роботизированного телеприсутствия », Опции телеприсутствия , лето 2013 г. (по состоянию на 8 декабря 2013 г.).
- ^ «Роботы телеприсутствия помогают хронически больным детям поддерживать социальные и академические связи в школе» . робохаб . Калифорнийский университет в Ирвайне. 9 сентября 2016 года . Проверено 6 сентября 2019 г.
- ^ «Роботы экстренного реагирования» . НИСТ . 28 апреля 2014 г. Архивировано из оригинала 4 октября 2023 г.
- ^ «Стандартные методы испытаний ответных роботов» . Инженерная лаборатория НИСТ. 8 ноября 2016 г. Проверено 4 июня 2020 г.
- ^ «Стандарты подкомитета ASTM E54.09 для роботов реагирования» .
Внешние ссылки
[ редактировать ]- Библиография по телеробототехнике и телепистемологии, составленная Кеном Голдбергом для Леонардо / ISAST.
- «Босс роботизирован и катится за вами» Статья Джона Маркоффа в The New York Times, 4 сентября 2010 г.
| Основные статьи |  | |
|---|---|---|
| Типы | ||
| Классификации | ||
| Передвижение | ||
| Навигация и картографирование | ||
| Исследовать | ||
| Компании |
| |
| Связанный | ||