Остойчивость корабля
Остойчивость корабля — это область военно-морской архитектуры и проектирования кораблей, которая занимается поведением корабля в море как в стоячей воде, так и на волнах, независимо от того, целым или поврежденным. Расчеты устойчивости сосредоточены на центрах тяжести , центрах плавучести , метацентрах сосудов и на том, как они взаимодействуют.
История
[ редактировать ]
Остойчивость корабля, как это относится к военно-морской архитектуре, учитывалась на протяжении сотен лет. Исторически расчеты устойчивости корабля основывались на эмпирических расчетах, часто привязанных к определенной системе измерений. Некоторые из этих очень старых уравнений продолжают использоваться в книгах по военно-морской архитектуре и сегодня. Однако появление методов определения устойчивости, основанных на исчислении, в частности введение Пьером Бугером концепции метацентра в бассейне модели корабля 1740-х годов , позволяет гораздо более сложный анализ.
Мастера-кораблестроители прошлого использовали систему адаптивного и вариантного проектирования. Корабли часто копировались из одного поколения в другое с незначительными изменениями; воспроизводя стабильные конструкции, обычно можно было избежать серьезных проблем. Сегодня корабли все еще используют этот процесс адаптации и вариаций; однако вычислительная гидродинамика , тестирование моделей кораблей и лучшее общее понимание движений жидкости и корабля позволили разработать гораздо более аналитический проект.
Поперечные и продольные водонепроницаемые переборки были введены в броненосные конструкции между 1860 и 1880-ми годами, а переборки для предотвращения столкновений стали обязательными на британских паровых торговых судах до 1860 года. [ 1 ] До этого пробоина в корпусе в любой части судна могла затопить всю его длину. Поперечные переборки, хотя и дороги, но повышают вероятность выживания корабля в случае повреждения корпуса, ограничивая затопление пробитых отсеков, которые они отделяют от неповрежденных. Продольные переборки имеют аналогичное назначение, но необходимо учитывать эффекты повреждения остойчивости, чтобы исключить чрезмерный крен . Сегодня большинство судов имеют средства для выравнивания уровня воды в секциях левого и правого борта (перекрестное затопление), что помогает ограничить структурные напряжения и изменения крена и/или дифферента судна.
Дополнительные системы стабилизации
[ редактировать ]Дополнительные системы стабилизации предназначены для уменьшения воздействия волн и порывов ветра. Они не повышают остойчивость судна в спокойном море. Международная конвенция Международной морской организации о грузовой марке не называет системы активной устойчивости методом обеспечения остойчивости. Корпус должен быть устойчивым без активных систем.
Пассивные системы
[ редактировать ]Трюмный киль
[ редактировать ]
Трюмный киль — длинный, часто V-образный металлический плавник, приваренный по длине корабля на повороте трюма. Трюмные кили применяются парами (по одному на каждый борт). В редких случаях корабль может иметь более одного трюмного киля на каждый борт. Трюмные кили увеличивают гидродинамическое сопротивление при крене судна, ограничивая величину крена.
Аутригеры
[ редактировать ]На судах могут использоваться аутригеры для уменьшения качки либо за счет силы, необходимой для погружения плавучих поплавков, либо за счет гидродинамических крыльев. В некоторых случаях эти выносные опоры имеют достаточный размер, чтобы классифицировать судно как тримаран ; на других судах их можно называть просто стабилизаторами.
Стабилизаторы танков
[ редактировать ]Резервуары, регулирующие крен, представляют собой внутренние резервуары, оснащенные перегородками для замедления скорости перетока воды с левого борта резервуара на правый борт. Он сконструирован таким образом, что большее количество воды задерживается на верхней стороне сосуда. Он предназначен для достижения эффекта, противоположного эффекту свободной поверхности .
Параваны
[ редактировать ]Параваны могут использоваться тихоходными судами, например рыболовными судами, для уменьшения крена.
Активные системы
[ редактировать ]Системы активной стабилизации, установленные на многих судах, требуют подачи энергии в систему в виде насосов, гидравлических поршней или электрических приводов . Они включают в себя стабилизирующие ребра, прикрепленные к боковой стороне судна или резервуаров, в которых перекачивается жидкость, противодействующая движению судна.
Стабилизирующие плавники
[ редактировать ]Активные стабилизаторы плавников уменьшают крен, который испытывает судно на ходу или, в последнее время, во время покоя. Они выходят за пределы корпуса судна ниже ватерлинии и изменяют угол атаки в зависимости от угла крена и скорости крена судна, действуя аналогично элеронам самолета . Круизные лайнеры и яхты часто используют этот тип стабилизирующей системы.
Когда плавники не убираются, они представляют собой неподвижные придатки к корпусу, возможно, расширяя ширину или зону осадки и требуя внимания для дополнительного зазора корпуса.
В то время как типичный стабилизатор «активного плавника» эффективно противодействует крену судов на ходу, некоторые современные системы активных плавников могут уменьшать крен, когда суда не на ходу. Эти системы, называемые нулевой скоростью или стабилизацией в состоянии покоя, работают путем перемещения специально разработанных плавников с достаточным ускорением и синхронизацией импульсов для создания эффективной энергии подавления крена.
Стабилизация крена руля направления
[ редактировать ]Если судно находится на ходу, быстрая смена руля не только инициирует изменение курса, но и заставит судно крениться. Для некоторых кораблей, таких как фрегаты, этот эффект настолько велик, что его может использовать алгоритм управления для одновременного управления кораблем и уменьшения его крена. Такую систему обычно называют « Системой стабилизации крена руля направления ». Его эффективность может быть такой же хорошей, как и у стабилизаторов. Однако это зависит от скорости корабля (чем выше, тем лучше) и различных аспектов конструкции корабля, таких как положение, размер и качество системы позиционирования руля направления (ведет себя так же быстро, как стабилизатор). Также важно то, насколько быстро корабль будет реагировать на движения руля, движения крена (быстрее — лучше) и скорость поворота (лучше медленнее). Несмотря на высокую стоимость качественного рулевого устройства и усиления кормы корабля, этот вариант стабилизации обеспечивает лучшую экономику, чем стабилизаторы. Он требует меньше установок, менее уязвим и вызывает меньшее сопротивление. Более того, необходимые высококачественные компоненты обеспечивают отличные рулевые свойства даже в те периоды, когда уменьшение крена не требуется, а также значительное снижение подводного шума. Известными кораблями ВМФ с таким решением стабилизации являются F124 (Германия), M-fregat и LCF (оба принадлежат ВМС Нидерландов).
Гироскопические внутренние стабилизаторы
[ редактировать ]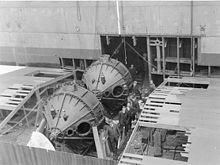
Гироскопы впервые использовались для контроля крена корабля в конце 1920-х — начале 1930-х годов на военных кораблях, а затем и на пассажирских лайнерах. Наиболее амбициозное использование больших гироскопов для управления креном корабля было на итальянском пассажирском лайнере SS Conte di Savoia , на котором три больших гироскопа Сперри были установлены в носовой части корабля. Хотя она оказалась успешной в значительном уменьшении крена на рейсах в западном направлении, на восточном участке систему пришлось отключить по соображениям безопасности. Это произошло потому, что при попутном волнении (и вызванных этим глубоких медленных кренах) судно имело тенденцию «зависать» с включенной системой, а создаваемая ею инерция затрудняла выпрямление судна при сильных кренах. [ 2 ]
Гиростабилизаторы состоят из вращающегося маховика и гироскопической прецессии выпрямляющий момент , которая передает на конструкцию корпуса лодки. Угловой момент маховика гироскопа является мерой того, насколько маховик будет продолжать вращаться вокруг своей оси, если на него не воздействует внешний крутящий момент. Чем выше угловой момент, тем больше сила сопротивления гироскопа внешнему крутящему моменту (в этом случае больше возможностей по предотвращению крена лодки).
Гироскоп имеет три оси: ось вращения, входную ось и выходную ось. Ось вращения — это ось, вокруг которой вращается маховик, и для гироскопа лодки она вертикальна. Входная ось — это ось, вокруг которой прилагаются входные крутящие моменты. Для лодки основной входной осью является ее продольная ось, поскольку это ось, вокруг которой лодка катится. Основной выходной осью является поперечная (поперечная) ось, вокруг которой гироскоп вращается или прецессирует в ответ на входной сигнал.
Когда лодка катится, вращение действует как входной сигнал для гироскопа, заставляя гироскоп генерировать вращение вокруг своей выходной оси, так что ось вращения вращается, чтобы совместиться с входной осью. Это выходное вращение называется прецессией , и в случае с лодкой гироскоп будет вращаться вперед и назад вокруг выходной оси или оси подвеса.
Угловой момент является мерой эффективности гироскопического стабилизатора, аналогично мощности дизельного двигателя или киловаттам генератора. В спецификациях гироскопических стабилизаторов полный угловой момент ( момент инерции, ключевой величиной является умноженный на скорость вращения). В современных конструкциях крутящий момент выходной оси можно использовать для управления углом стабилизатора (см. Выше), чтобы противодействовать крену лодки, поэтому требуется только небольшой гироскоп. Идея гироскопического управления стабилизаторами плавника корабля была впервые предложена в 1932 году ученым General Electric доктором Александерсоном. Он предложил гироскоп для управления током, подаваемым на электродвигатели на плавниках стабилизатора, при этом команды срабатывания генерируются вакуумными лампами тиратрона . [ 3 ]
Расчетные условия устойчивости
[ редактировать ]При проектировании корпуса расчеты остойчивости выполняются для неповрежденного и поврежденного состояний судна. Корабли обычно проектируются так, чтобы немного превышать требования к остойчивости (ниже), поскольку их обычно проверяет на это классификационное общество .
Неповрежденная стабильность
[ редактировать ]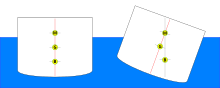
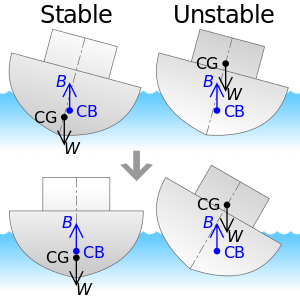
Расчеты неповрежденной остойчивости относительно просты и включают в себя учет всех центров масс объектов на судне, которые затем вычисляются/рассчитываются для определения центра тяжести судна и центра плавучести корпуса. Обычно учитываются расположение и погрузка грузов, работа кранов и расчетное состояние моря. На диаграмме справа показано, что центр тяжести находится значительно выше центра плавучести, но корабль остается устойчивым. Корабль устойчив, потому что, когда он начинает крениться, одна сторона корпуса начинает подниматься из воды, а другая начинает погружаться. Это приводит к смещению центра плавучести в сторону, которая находится ниже в воде. Задача военно-морского архитектора — обеспечить, чтобы центр плавучести смещался за пределы центра тяжести по мере крена корабля. Линия, проведенная из центра плавучести в слегка крененном состоянии по вертикали, пересечет осевую линию в точке, называемой метацентром. Пока метацентр находится выше киля, чем центр тяжести, корабль устойчив в вертикальном состоянии.
Остойчивость судов в море регулируется стандартом Международной морской организации (ИМО) — Международным кодексом остойчивости . [ 4 ]
Устойчивость к повреждению (Устойчивость в поврежденном состоянии)
[ редактировать ]Расчеты устойчивости при повреждении намного сложнее, чем при неповреждении. Обычно используется программное обеспечение, использующее численные методы, поскольку вычисления площадей и объемов с использованием других методов могут быстро стать утомительными и длительными.
Потеря устойчивости из-за затопления может быть частично связана с эффектом свободной поверхности. Вода, скапливающаяся в корпусе, обычно стекает в трюмы, понижая центр тяжести и фактически увеличивая метацентрическую высоту . Это предполагает, что корабль остается неподвижным и в вертикальном положении. Однако, как только корабль наклоняется на какую-либо степень (например, на него ударяется волна), жидкость в трюме перемещается в нижнюю сторону. В результате получается список .
Устойчивость также снижается при затоплении, когда, например, пустой резервуар наполнен морской водой. Потеря плавучести танка приводит к тому, что эта часть корабля слегка опускается в воду. При этом создается крен, если резервуар не находится на центральной линии судна.
При расчетах устойчивости предполагается, что при заполнении резервуара его содержимое теряется и заменяется морской водой. Если это содержимое легче морской воды (например, легкая нефть), то плавучесть теряется, и секция соответственно слегка опускается в воду.
Для торговых судов и все чаще для пассажирских судов расчеты устойчивости к повреждениям носят вероятностный характер. То есть вместо оценки корабля по отказу одного отсека будет оцениваться и ситуация, когда затоплены два, а то и три отсека. Это концепция, в которой вероятность повреждения отсека сочетается с последствиями для корабля, в результате чего получается индекс устойчивости к повреждению, который должен соответствовать определенным правилам.
Требуемая стабильность
[ редактировать ]Чтобы быть приемлемыми для таких классификационных обществ, как Bureau Veritas , Американское бюро судоходства , Регистр судов Ллойда , Корейский регистр судоходства и Det Norske Veritas , чертежи судна должны быть предоставлены на независимую проверку классификационному обществу. Также должны быть предоставлены расчеты, соответствующие структуре, изложенной в правилах страны, под флагом которой судно собирается плавать.
В рамках этой структуры разные страны устанавливают требования, которые необходимо соблюдать. Для судов, плавающих под флагом США, чертежи и расчеты остойчивости проверяются на соответствие Кодексу федеральных правил США и Международной конвенции по охране человеческой жизни на море (SOLAS). Суда должны быть устойчивыми в тех условиях, для которых они предназначены, как в неповрежденном, так и в поврежденном состоянии. Масштаб ущерба, необходимый для проектирования, включен в нормативные акты. Предполагаемая пробоина рассчитывается как доли длины и ширины судна и должна быть расположена в той части судна, где она может нанести наибольший ущерб остойчивости судна.
Кроме того, правила береговой охраны США распространяются на суда, работающие в портах и водах США. Обычно эти правила береговой охраны касаются минимальной метацентрической высоты или минимального восстанавливающего момента. Поскольку в разных странах могут быть разные требования к минимальной метацентрической высоте, большинство кораблей теперь оснащены компьютерами устойчивости, которые рассчитывают это расстояние на лету в зависимости от загрузки груза или экипажа. Для этой задачи используется множество коммерческих компьютерных программ.
В зависимости от класса судна на борту необходимо иметь либо письмо об остойчивости, либо буклет об остойчивости. [ 5 ] [ 6 ]
См. также
[ редактировать ]- Опрокидывание - действие, при котором судно переворачивается на бок или переворачивается.
- Эффект свободной поверхности - Влияние жидкостей в слабых резервуарах
- Испытание на наклон - испытание для определения остойчивости, веса порожнего судна и центра тяжести корабля.
- Кронан (корабль) – корабль ВМС Швеции 1670-х гг.
- Мэри Роуз - английский военный корабль Тюдоров (1511–1545)
- Ниобе (шхуна) – Учебная шхуна Рейхсмарине.
- Памир (корабль) – немецкий парусник.
- Движение судна - термины, связанные с шестью степенями свободы движения.
- SS Eastland - пассажирский корабль, перевернувшийся в Чикаго в 1915 году.
- Стабилизация во время перерыва – уменьшение качки стоящего на якоре/пришвартованного судна.
Ссылки
[ редактировать ]- ↑ От воина к дредноуту Д.К. Брауна, Chatham Publishing (июнь 1997 г.)
- ^ "Итальянский лайнер, бросающий вызов волнам", Popular Mechanics , апрель 1931 г.
- ^ "Плавники, предназначенные для больших лайнеров для предотвращения качения" Popular Mechanics , август 1932 г.
- ^ «Кодекс нетронутой стабильности» . Международная морская организация . Проверено 29 февраля 2024 г.
- ^ 46 CFR, гл. I (издание 10–1–99) govinfo.gov
- ^ Резолюция MSC.267(85) wwwcdn.imo.org.