Векторнозначная функция
Вектор -функция , также называемая векторной функцией , представляет собой математическую функцию одной или нескольких переменных которых , диапазон представляет собой набор многомерных векторов или бесконечномерных векторов . Входные данные векторной функции могут быть скаляром или вектором (то есть размерность области может быть равна 1 или больше 1); Размер области определения функции не имеет отношения к размерности ее диапазона.
Пример: спираль
[ редактировать ]
Типичным примером векторной функции является функция, которая зависит от одного вещественного параметра t , часто представляющего время , получается вектор v ( t ) в результате чего . В терминах стандартных единичных векторов i , j , k декартова трехмерного пространства эти конкретные типы векторных функций задаются такими выражениями, как где f ( t ) , g ( t ) и h ( t ) — координатные функции параметра t , а область определения этой вектор-функции — это пересечение областей определения функций f , g и h . Его также можно использовать в других обозначениях: Вектор r ( t ) имеет хвост в начале координат и голову в координатах, вычисляемых функцией.


Вектор, показанный на графике справа, представляет собой оценку функции вблизи t = 19,5 (между 6π и 6,5π , т. е. несколько больше 3 оборотов). Спираль — это путь , описываемый кончиком вектора при увеличении t от нуля до 8 π .

В 2D мы можем аналогично говорить о векторных функциях как или


Линейный случай
[ редактировать ]В линейном случае функцию можно выразить через матрицы : где y — выходной вектор размера n × 1 , x — размера k × 1 вектор входных данных , а A — n × k матрица параметров размера . Тесно связан аффинный случай (линейный с точностью до перевода ), когда функция принимает вид где, кроме того, b'' — n × 1 вектор параметров размером .


Линейный случай возникает часто, например, в множественной регрессии . [ нужны разъяснения ] где, например, n × 1 вектор прогнозируемых значений зависимой переменной выражается линейно через k × 1 вектор ( k < n ) расчетных значений параметров модели: в которой X (играющий роль A в предыдущей общей форме) представляет собой матрицу размера n × k фиксированных (эмпирически обоснованных) чисел.



Параметрическое представление поверхности
[ редактировать ]Поверхность . — это двумерный набор точек, встроенных в (чаще всего) трехмерное пространство Один из способов представления поверхности — параметрические уравнения , в которых два параметра s и t определяют три декартовых координаты любой точки на поверхности: Здесь F — векторная функция. Для поверхности, погруженной в n -мерное пространство, аналогично имеет место представление


Производная трехмерной вектор-функции
[ редактировать ]Многие векторные функции, например скалярные функции , можно дифференцировать , просто дифференцируя компоненты в декартовой системе координат. Таким образом, если является векторной функцией, то Производная вектора допускает следующую физическую интерпретацию: если r ( t ) представляет положение частицы, то производная — это скорость частицы. Аналогично, производная скорости есть ускорение.



Частная производная
[ редактировать ]Частная производная векторной функции a по скалярной переменной q определяется как [1] где a i — составляющая a i в направлении e . скалярная также называют направляющим косинусом a e и Его i или их скалярным произведением . Векторы e 1 , e 2 , e 3 образуют ортонормированный базис , фиксированный в системе отсчета , в которой берется производная.

Обыкновенная производная
[ редактировать ]Если a рассматривать как векторную функцию одной скалярной переменной, такой как время t , то приведенное выше уравнение сводится к первой обычной производной по времени от a по t : [1]

Полная производная
[ редактировать ]Если вектор a является функцией числа n скалярных переменных q r ( r = 1, ..., n ) , и каждый q r является только функцией времени t , то обычная производная a по t может быть выражено в форме, известной как полная производная , как [1]

Некоторые авторы предпочитают использовать заглавную букву D для обозначения оператора полной производной, как в D / Dt . Полная производная отличается от частной производной по времени тем, что полная производная учитывает изменения a из-за изменения во времени переменных q r .
Системы отсчета
[ редактировать ]В то время как для скалярных функций существует только одна возможная система отсчета , для получения производной векторной функции требуется выбор системы отсчета (по крайней мере, когда фиксированная декартова система координат не подразумевается как таковая). После того, как система отсчета выбрана, производную векторной функции можно вычислить, используя методы, аналогичные методам вычисления производных скалярных функций. Другой выбор системы отсчета, как правило, приводит к другой производной функции. Производные функции в разных системах отсчета имеют определенную кинематическую связь .
Производная векторной функции с нефиксированными основаниями
[ редактировать ]Приведенные выше формулы для производной векторной функции основаны на предположении, что базисные векторы e 1 , e 2 , e 3 производная a постоянны, то есть фиксированы в системе отсчета, в которой берется , и, следовательно, e 1 , e 2 , e 3 имеют производную, равную тождественному нулю. Это часто справедливо для задач, связанных с векторными полями в фиксированной системе координат, или для простых задач физики . Однако многие сложные проблемы связаны с производной векторной функции в нескольких движущихся системах отсчета, а это означает, что базисные векторы не обязательно будут постоянными. В таком случае, когда базисные векторы e 1 , e 2 , e 3 фиксированы в системе отсчета E, но не в системе отсчета N, более общая формула для обычной производной по времени вектора в системе отсчета N: [1] где верхний индекс N слева от оператора производной указывает систему отсчета, в которой берется производная. Как было показано ранее , первый член в правой части равен производной a в системе отсчета, где e 1 , e 2 , e 3 являются постоянными, система отсчета E. Также можно показать, что второй член в системе отсчета правая часть равна относительной угловой скорости двух перекрестных систем отсчета , умноженной вектор a . на сам [1] Таким образом, после замены формула, связывающая производную векторной функции в двух системах отсчета, имеет вид [1] где Н ой И — угловая скорость системы отсчета E относительно системы отсчета N.


Одним из распространенных примеров использования этой формулы является определение скорости космического объекта, такого как ракета , в инерциальной системе отсчета с использованием измерений скорости ракеты относительно земли. Скорость Н v Р в инерциальной системе отсчета N ракеты R, находящейся в позиции r Р можно найти по формуле где Н ой И - угловая скорость Земли относительно системы инерциальной системы N. Поскольку скорость является производной положения, Н v Р и И v Р являются производными от r Р в системах отсчета N и E соответственно. Путем замены, где И v Р - вектор скорости ракеты, измеренный от системы отсчета E, прикрепленной к Земле.


Производная и векторное умножение
[ редактировать ]Производная произведения векторных функций ведет себя аналогично производной произведения скалярных функций. [а] В частности, в случае скалярного умножения вектора, если p является функцией скалярной переменной от q , [1]

В случае точечного умножения для двух векторов a и b , которые оба являются функциями q , [1]

Аналогично, производная векторного произведения двух векторных функций равна [1]

Производная n -мерной вектор-функции
[ редактировать ]Функция f действительного числа t со значениями в пространстве можно записать как . Его производная равна Если f является функцией нескольких переменных, скажем, , то частные производные компонентов f образуют a называемая матрицей Якобиана f матрица , .





Бесконечномерные векторные функции
[ редактировать ]Если значения функции f лежат в бесконечномерном векторном пространстве X , таком как гильбертово пространство , то f можно назвать бесконечномерной векторной функцией .
Функции со значениями в гильбертовом пространстве
[ редактировать ]Если аргумент f X — действительное число, а можно определить , — гильбертово пространство, то производную f в точке t как в конечномерном случае: Большинство результатов конечномерного случая также справедливы и в бесконечномерном случае, mutatis mutandis . Дифференцирование также можно определить для функций нескольких переменных (например, или даже , где Y — бесконечномерное векторное пространство).



NB. Если X — гильбертово пространство, то можно легко показать, что любая производная (и любой другой предел ) может быть вычислена покомпонентно: если (т.е. , где является ортонормированным базисом пространства X ), и существует, то Однако существование покомпонентной производной не гарантирует существование производной, поскольку покомпонентная сходимость в гильбертовом пространстве не гарантирует сходимости относительно фактической топологии гильбертова пространства.





Другие бесконечномерные векторные пространства
[ редактировать ]Большая часть вышесказанного справедлива для других топологических векторных пространств X. и Однако не так много классических результатов справедливы в условиях банахового пространства , например, абсолютно непрерывная функция со значениями в подходящем банаховом пространстве не обязательно должна иметь производную где-либо. Более того, в большинстве банаховых пространств нет ортонормированных базисов.
Векторное поле
[ редактировать ]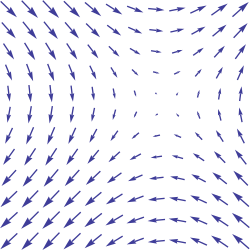
В векторном исчислении и физике векторное поле — это присвоение вектора каждой точке пространства , чаще всего евклидова пространства. . [2] Векторное поле на плоскости можно представить как набор стрелок с заданными величинами и направлениями, каждая из которых прикреплена к точке на плоскости. Векторные поля часто используются для моделирования, например, скорости и направления движущейся жидкости в трехмерном пространстве , например ветра , или силы и направления некоторой силы , например магнитной или гравитационной силы, когда она изменяется от одна точка в другую точку.
Элементы дифференциального и интегрального исчисления естественным образом распространяются на векторные поля. Когда векторное поле представляет силу , линейный интеграл векторного поля представляет работу , совершаемую силой, движущейся по траектории, и в этой интерпретации сохранение энергии проявляется как частный случай фундаментальной теоремы исчисления . Векторные поля можно с пользой рассматривать как представляющие скорость движущегося потока в пространстве, и эта физическая интуиция приводит к таким понятиям, как дивергенция ( которая представляет скорость изменения объема потока) и ротор (который представляет вращение потока). поток).
Векторное поле — это частный случай векторной функции , размерность области определения которой не связана с размерностью ее диапазона; например, вектор положения пространственной кривой определяется только для меньшего подмножества окружающего пространства.Аналогично, n координат — векторное поле в области n -мерного евклидова пространства. может быть представлена как векторная функция, которая сопоставляет n -кортеж действительных чисел с каждой точкой области. Такое представление векторного поля зависит от системы координат, и существует четко определенный закон преобразования ( ковариантность и контравариантность векторов ) при переходе из одной системы координат в другую.
Векторные поля часто обсуждаются на открытых подмножествах евклидова пространства, но также имеют смысл и на других подмножествах, таких как поверхности , где они связывают стрелку, касающуюся поверхности в каждой точке ( касательный вектор ).
В более общем смысле векторные поля определяются на дифференцируемых многообразиях , которые представляют собой пространства, которые выглядят как евклидово пространство в малых масштабах, но могут иметь более сложную структуру в больших масштабах. В этом случае векторное поле дает касательный вектор в каждой точке многообразия (то есть сечение касательного расслоения к многообразию). Векторные поля — это один из видов тензорных полей .См. также
[ редактировать ]- Координатный вектор
- Изгиб
- Многозначная функция
- Параметрическая поверхность
- Вектор положения
- Параметризация
Примечания
[ редактировать ]- ^ Фактически, эти отношения получены с применением правила произведения покомпонентно.
Ссылки
[ редактировать ]- ^ Jump up to: а б с д и ж г час я Кейн, Томас Р.; Левинсон, Дэвид А. (1996). «1–9 Дифференцирование векторных функций». Динамика: теория и приложения . Саннивейл, Калифорния: МакГроу-Хилл. стр. 29–37. [ ISBN отсутствует ]
- ^ Гальбис, Антонио; Маэстре, Мануэль (2012). Векторный анализ против векторного исчисления . Спрингер. п. 12. ISBN 978-1-4614-2199-3 .
- Ху, Чуан-Ган; Ян, Чунг-Чун (2013). Векторные функции и их приложения . Springer Science & Business Media. ISBN 978-94-015-8030-4 .
Внешние ссылки
[ редактировать ]- Векторнозначные функции и их свойства (из Общественного колледжа Лейк-Тахо)
- Вайсштейн, Эрик В. «Векторная функция» . Математический мир .
- Статья «Все2»
- 3 Размерные векторные функции (из Государственного университета Восточного Теннесси)
- «Позиционно-векторные функции» Академии Хана Модуль
| Базы данных органов управления : Национальные |
|---|