Симулятор движения

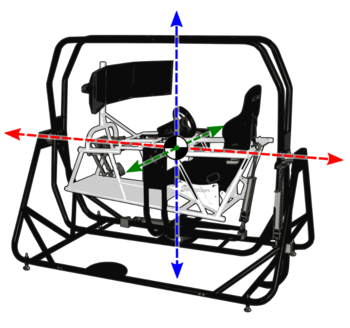
Симулятор движения или платформа движения — это механизм, который создает ощущение присутствия в реальной движущейся среде. [ 1 ] В симуляторе движение синхронизируется с визуальным отображением сцены внешнего мира (OTW). Платформы движения могут обеспечивать движение во всех шести степенях свободы (ГРИП), которые может испытывать объект, который может свободно перемещаться, например самолет или космический корабль: [ 1 ] Это три вращательные степени свободы (крен, тангаж, рыскание) и три поступательные или линейные степени свободы (помпаж, качка, раскачивание).
Типы
[ редактировать ]Симуляторы движения можно классифицировать в зависимости от того, управляет ли пассажир транспортным средством (например, в симуляторе полета для обучения пилотов) или в зависимости от того, является ли пассажир пассивным водителем , например, в симуляторе езды или кинотеатре. [ 2 ]

- Примерами симуляторов движения, управляемых пассажирами, являются авиасимуляторы , симуляторы вождения и гидравлические аркадные шкафы для гоночных игр и других аркадных видеоигр . , управляемых пассажирами, Другие игры-симуляторы транспортных средств имитируют управление лодками, мотоциклами, американскими горками, военной техникой, квадроциклами или космическими кораблями, а также другими типами кораблей. [ 3 ]
- Примерами симуляторов пассивной езды являются аттракционы в тематических парках целая театральная система с проекционным экраном , где перед гонщиками находится . База имитатора движения также может быть портативной, как и в случае с транспортным средством с улучшенным движением . Дополнительные сведения о симуляторах пассивного движения см. в разделах «Симулятор езды» и «Симулятор езды» этой статьи.

Платформы движения для авиационных симуляторов находятся на высоком уровне, а также некоторые из более дорогих аттракционов в парках развлечений, в которых используется движущаяся база типа симулятора; Аркадные развлекательные устройства находятся посередине, а движущиеся платформы для домашнего использования недороги, но не так эффективны, как устройства более высокого уровня.
Многие подвижные платформы используются в авиасимуляторах для обучения пилотов. [ 4 ]
Этот раздел нуждается в дополнительных цитатах для проверки . ( Август 2022 г. ) |
История движущихся платформ
[ редактировать ]Одна из первых подвижных платформ, Sanders Teacher, была создана в 1910 году. Это была модель самолета, соединенная с землей посредством универсального шарнира. При наличии ветра пилот, проходящий обучение, мог использовать поверхности управления самолета для перемещения модели по трем степеням свободы вращения : тангажу, крену и рысканию.
В 1929 году значительный прогресс в технологии подвижных платформ был достигнут благодаря патенту Эдвина Линка на то, что стало известно как «Link Trainer». При этом использовались ручка управления и руль направления пилота для управления сильфонами органного типа под кабиной симулятора. Мехи могли надуваться или сдуваться, создавая движение по тангажу, крену и рысканию.
В 1958 году в пилотажном тренажере самолета «Комета-4» использовалась гидравлическая система с тремя степенями свободы.
Сегодня в платформах симуляторов движения используются 6 домкратов («гексаподы»), обеспечивающие все шесть степеней свободы, три вращения: наклон, крен и рысканье, а также три поступательных движения: подъем (вверх и вниз), покачивание (вбок) и порывистость (продольное движение). ).
6 движений глубины резкости являются мощным сигналом в сочетании с изображениями внешнего мира (OTW). Платформы движения вместе с изображениями OTW используются в: моделировании полета, моделировании вождения, аттракционах и небольших домашних симуляторах.
Движущаяся платформа используется в военных и коммерческих программах обучения полетам . Также в развлекательных устройствах в тематических парках, где пользователи, от одного человека до многих, сидят рядами перед экранами, на которых проецируются изображения, синхронизированные с движениями с платформы под кабиной симулятора.
Типичной системой движения высокого класса является платформа Стюарта , которая обеспечивает полные 6 степеней свободы (3 поступательного движения и 3 вращения) и использует сложные алгоритмы для обеспечения движений и ускорений с высокой точностью. Они используются во многих приложениях, включая авиасимуляторы для обучения пилотов.
К середине спектра относятся подвижные платформы в аркадных играх , аттракционах и других мероприятиях. Эти системы попадают в ценовой диапазон от 10 000 до 99 000 долларов США. Обычно требования к пространству для такой платформы скромны: требуется лишь часть игрового зала, а меньший диапазон движения обеспечивается с помощью аналогичных, менее дорогих систем управления , чем у платформ высокого класса.
стало тенденцией В 1980-х годах в аркадных видеоиграх использовать аркадные шкафы с гидравлическим симулятором движения . [ 5 ] [ 6 ] Эта тенденция была вызвана играми Sega «тайкан», где «тайкан» в переводе с японского означает «ощущение тела». [ 6 ] Первой игрой Sega, в которой использовался кабинет для симулятора движения, была Space Tactics (1981), симулятор космического боя , в котором был шкаф в кабине, где экран перемещался синхронно с происходящим на экране действием. [ 5 ] Тенденция «тайкан» возникла позже, когда Ю Судзуки команда из Sega (позже известная как Sega AM2 ) разработала Hang-On (1985), гоночную видеоигру , в которой игрок сидит и перемещает копию мотоцикла , чтобы управлять игровым процессом. действия. [ 7 ] Команда Suzuki в Sega последовала этому примеру, создав кабины для симуляторов гидравлического движения для рельсовых стрелков, таких как Space Harrier (1985), гоночных игр, таких как Out Run (1986), и аркадных симуляторов боевых полетов , таких как After Burner (1987) и G-LOC: Воздушный бой (1990). Одним из самых сложных симуляторов движения в игровых автоматах был Sega R360 (1990), который имитировал полное вращение самолета на 360 градусов. [ 5 ] [ 8 ] С тех пор Sega продолжала производить шкафы для симуляторов движения для аркадных игр вплоть до 2010-х годов. [ 5 ]
К более дешевым системам относятся домашние движущиеся платформы, которые в последнее время стали более распространенным устройством, используемым для улучшения видеоигр, моделирования и виртуальной реальности. Эти системы попадают в ценовой диапазон от 1000 до 9000 долларов США. В течение 2000-х годов (десятилетия) несколько частных лиц и предприятий разработали эти меньшие по размеру и более доступные системы движения. Большинство этих систем были разработаны в основном энтузиастами авиасимуляторов, продавались как проекты «сделай сам» и могли быть собраны дома из обычных компонентов примерно за тысячу долларов США (1000 долларов США). [ 9 ] В последнее время на рынке возрос интерес к движущимся платформам для более личного домашнего использования. Применение этих систем движения выходит за рамки простого моделирования летной подготовки и выходит на более широкий рынок более обобщенных, «ориентированных на ремесло» систем моделирования, развлечений и виртуальной реальности . [ 10 ]
Обычное использование
[ редактировать ]Инженерный анализ
[ редактировать ]Платформы движения обычно используются в области машиностроения для анализа и проверки характеристик и конструкции транспортных средств. Возможность связать компьютерную динамическую модель конкретной системы с физическим движением дает пользователю возможность почувствовать, как транспортное средство будет реагировать на управляющие сигналы, без необходимости создания дорогостоящих прототипов. Например, инженер, проектирующий внешний топливный бак для самолета, может поручить пилоту определить влияние на летные качества, а инженер-механик может ощутить влияние новой тормозной системы, не создавая никакого оборудования, что сэкономит время и деньги.
Авиационные симуляторы также используются производителями самолетов для тестирования нового оборудования. Подключив смоделированную кабину с визуальным экраном к реальной системе управления полетом в лаборатории, объединив пилота с электрическими, механическими и гидравлическими компонентами, существующими на реальном самолете, можно провести полную оценку системы перед первоначальными летными испытаниями. Этот тип испытаний позволяет моделировать «исходные неисправности» (т. е. преднамеренную утечку гидравлической системы, ошибку программного обеспечения или отключение компьютера), которые служат для подтверждения того, что резервные конструктивные особенности самолета работают должным образом. Пилот-испытатель также может помочь выявить недостатки системы, такие как неадекватные или отсутствующие предупреждающие индикаторы или даже непреднамеренное движение ручки управления. Эти испытания необходимы для моделирования событий чрезвычайно высокого риска, которые невозможно провести в полете, но, тем не менее, необходимо продемонстрировать. Хотя для этого типа испытаний не требуется движение с 6 степенями свободы, визуальный экран позволяет пилоту «управлять» самолетом при одновременном срабатывании неисправностей.
Симуляторы езды
[ редактировать ]Симуляторы движения иногда используются в тематических парках или парках развлечений, чтобы дать гостям парка имитацию полета или другого движения.
Некоторые примеры:
- Компания Star Tours: The Adventures Continue , расположенная в Диснейленде и других тематических парках Диснея , использует специально модифицированные военные авиасимуляторы, известные как симуляторы приложений для отдыха с передовыми технологиями (ATLAS), для имитации полета в космическом пространстве.
- Body Wars (сейчас закрыт) — аттракцион в павильоне «Чудеса жизни» в Epcot , в котором использовалась та же технология, что и в Star Tours, для имитации поездки по человеческому телу.
- Дикая Арктика в SeaWorld Орландо и SeaWorld Сан-Диего .
- Soarin 'Over California , расположенный в Disney California Adventure , использует купольный экран IMAX и симуляцию дельтаплана для имитации полета над многими живописными местами Калифорнии.
- Nemo & Friends SeaRider — это аттракцион-симулятор в токийском DisneySea .
- « Звездный путь: Опыт » проходил в отеле Hilton в Лас-Вегасе в период с 1998 по 2008 год. Его «Клингонская встреча» завершилась поездкой на современном симуляторе полета с 6 степенями свободы, включая соответствующие кадры из фильма о космических сражениях.
- «Назад в будущее: Поездка» , аттракцион-симулятор, основанный на «Назад в будущее» серии фильмов , проходил в Universal Studios Florida , Universal Studios Hollywood и Universal Studios Japan . В аттракционе использовались автомобили-симуляторы на базе DeLorean , обращенные к купольному экрану IMAX высотой 70 футов. В 2008 году в парках Флориды и Голливуда его заменил другой аттракцион-симулятор — The Simpsons Ride .
- «Фантастический мир Ханны-Барбера» (ныне закрытый) был одним из первых аттракционов Universal Studios Florida. В аттракционе использовались ракетные автомобили-симуляторы и экран размером с театр.
- Nicktoon Blast Джимми Нейтрона (сейчас закрыт) располагался в тематическом парке Universal Studios Florida, где располагался «Фантастический мир Ханны-Барбера». В аттракционе использовались ракетные автомобили-симуляторы и экран размером с кинотеатр.
- В Национальном музее авиации и космонавтики в Вашингтоне, округ Колумбия, находится галерея, полная двухместных интерактивных авиасимуляторов, выполняющих бочки на 360 градусов в воздушном бою. [ 11 ] [ 12 ]
- «Европа в воздухе» Аттракцион-симулятор , расположенный в Буш Гарденс в Вильямсбурге , использует движущуюся платформу, видеоматериалы высокой четкости и эффекты ветра для имитации полета над . известными символами Европы
- VRM Switzerland и Airbus Helicopters сотрудничают и квалифицируют в соответствии с правилами EASA первое в мире H125 уровня 3. учебное устройство для полетов в виртуальной реальности
Видеоигры
[ редактировать ]Некоторые игры-симуляторы вождения и полета позволяют использовать специализированные контроллеры, такие как рулевые колеса, ножные педали или джойстики. В некоторых игровых контроллерах, разработанных в последние годы, используется тактильная технология , обеспечивающая тактильную обратную связь пользователю в режиме реального времени в виде вибрации от контроллера. Симулятор движения делает следующий шаг, обеспечивая тактильную обратную связь всего тела игрока. Игровые кресла Motion могут катиться влево и вправо, а также наклоняться вперед и назад, имитируя повороты, ускорение и замедление. Платформы движения обеспечивают более стимулирующий и потенциально реалистичный игровой процесс и обеспечивают еще большую физическую корреляцию со зрением и звуком в игре.
Как физиология человека обрабатывает и реагирует на движение [ 13 ]
[ редактировать ]То, как мы воспринимаем свое тело и окружающую среду, зависит от того, как наш мозг интерпретирует сигналы от наших различных сенсорных систем, таких как зрение, звук, равновесие и осязание. Специальные сенсорные устройства (или сенсорные «подушечки»), называемые рецепторами, преобразуют стимулы в сенсорные сигналы. Внешние рецепторы (экстерорецепторы) реагируют на раздражители, возникающие вне тела, например, на свет, который стимулирует глаза, звуковое давление, которое стимулирует ухо, давление и температуру, которые стимулируют кожу, и химические вещества, которые стимулируют нос и рот. Внутренние рецепторы (энтерорецепторы) реагируют на стимулы, возникающие внутри кровеносных сосудов.
Стабильность позы поддерживается за счет вестибулярных рефлексов, воздействующих на шею и конечности. Эти рефлексы, которые являются ключом к успешной синхронизации движений, находятся под контролем трех классов сенсорной информации:
- Проприорецепторы — это рецепторы, расположенные в мышцах, сухожилиях, суставах и кишечнике, которые посылают в мозг сигналы о положении тела. Пилоты самолетов иногда называют этот тип сенсорной информации «сидением штанов», например, увеличивая давление на тело, ощущаемое при маневрах, подтягиваниях и крутых поворотах.
- Вестибулярная система состоит из левого и правого органов «внутреннего уха», каждый из которых имеет полукружные каналы и отолиты. Вращательные ускорения при тангаже, крене и рыскании ощущаются посредством движения жидкости в трех полукружных каналах. Линейные ускорения при подъеме, покачивании и волнении воспринимаются «отолитами», представляющими собой чувствительные волоски с небольшой массой карбоната кальция наверху, поэтому они изгибаются под действием линейного ускорения.
- Визуальный входной сигнал от глаза передает в мозг информацию о положении, скорости и высоте корабля относительно объектов визуальной сцены внешнего мира (OTW). Скорость изменения перспективы движущейся визуальной сцены является важным сигналом в реальном мире, и визуальная система симулятора использует компьютерную графику для моделирования реальной сцены.
Проприорецепторы [ 13 ]
[ редактировать ]Проприорецепторы — это рецепторы, расположенные в мышцах, сухожилиях, суставах и кишечнике, которые посылают сигналы в мозг пропорционально ускорениям, которым подвергается тело. Примером «популярного» проприорецептора, упомянутого пилотами самолетов, является ощущение «на месте штанов». Проприорецепторы реагируют на стимулы, создаваемые мышечными движениями и мышечным напряжением. Сигналы, генерируемые экстерорецепторами и проприорецепторами, передаются сенсорными нейронами или нервами и называются электрохимическими сигналами. Когда нейрон получает такой сигнал, он отправляет его соседнему нейрону через мост, называемый синапсом. Синапс «зажигает» импульс между нейронами электрическими и химическими средствами. Эти сенсорные сигналы обрабатываются мозгом в ответ на сигналы, идущие по двигательным нервам. Мотонейроны с помощью своих специальных волокон передают эти сигналы мышцам, которым приказано либо сокращаться, либо расслабляться.
Все это датчики ускорения, и они не реагируют при достижении постоянной скорости или скорости. При постоянной скорости визуальные сигналы дают сигналы о движении, пока не произойдет новое ускорение, и датчики движения тела снова не отправят сигналы в мозг.
В платформах симулятора движения после создания начального ускорения платформа снова устанавливается в нейтральное положение со скоростью ниже порога движения человека, чтобы субъект не обнаруживал так называемую фазу «размывания» сигнала движения симулятора. После этого система движения готова выполнить следующее ускорение, которое будет обнаружено субъектом, как в реальном мире. Эта так называемая «сигнализация начала ускорения» является важным аспектом в симуляторах с движущимися платформами и моделирует то, как люди чувствуют движения в реальном мире.
Вестибулярная система [ 13 ]
[ редактировать ]Вестибулярная система – это система баланса и равновесия организма, включающая левый и правый вестибулярные органы «внутреннего уха». Он состоит из трех полукружных каналов или трубок, расположенных под прямым углом друг к другу. Каждый канал выстлан волосками, связанными с нервными окончаниями, и частично заполнен жидкостью. Когда голова испытывает ускорение, жидкость движется внутри каналов, заставляя волосяные фолликулы смещаться от их первоначального положения. В свою очередь, нервные окончания подают сигнал в мозг, который интерпретирует их как ускорение при трех вращениях: тангаже, крене или рыскании.
Вестибулярная система генерирует рефлексы для поддержания стабильности восприятия и позы. По сравнению с другими органами чувств, зрением, осязанием и звуком, вестибулярный сигнал быстро регистрируется мозгом, тогда как визуальные изменения, такие как перспектива и движение горизонта, следуют вскоре после этого. [ 14 ] Следовательно, в симуляторе важно, чтобы визуальные сигналы не воспринимались до того, как могут возникнуть сигналы движения, ситуация, обратная реальной ситуации, или так называемая «симуляционная болезнь». [ 15 ] Во-вторых, если голова испытывает устойчивое ускорение порядка 10–20 секунд, волосяные фолликулы возвращаются в «нулевое» или вертикальное положение, и мозг интерпретирует это как прекращение ускорения. Кроме того, существует нижний порог ускорения около 2 градусов в секунду, который мозг не может воспринимать. Другими словами, замедленное движение ниже порога не будет генерировать вестибулярные сигналы. Как обсуждалось в предыдущем разделе «Проприоцепторы», это позволяет «размывать» движение симулятора ниже порогового значения, готовясь к следующему ускорению, которое будет произведено платформой движения и воспринято субъектом симулятора.
Визуальные входы [ 13 ]
[ редактировать ]Человеческий глаз является важным источником информации при моделировании движения, когда доступно изображение с высоким разрешением, например, днем при хорошей видимости. Глаз передает в мозг информацию о положении, скорости и положении корабля относительно земли. В результате для реалистичного моделирования важно, чтобы сигналы от платформы движения (если она установлена) работали синхронно с внешней визуальной сценой. Как обсуждалось выше, в реальном мире сигналы движения обрабатываются мозгом до визуальных изменений, и за этим необходимо следить на симуляторе, иначе у некоторых людей может возникнуть головокружение и даже тошнота, так называемая «симуляторная болезнь».
Например, если пассажир приказывает транспортному средству повернуть влево, визуальные дисплеи также должны повернуть на ту же величину и с той же скоростью. Одновременно кабина наклоняет пассажира, имитируя движение. Проприоцепторы и вестибулярная система пассажира воспринимают это движение. Движение и изменение визуальных сигналов должны быть достаточно хорошо согласованы, чтобы любое несоответствие было ниже порога, позволяющего пассажиру обнаружить различия в движении.
Чтобы быть эффективным устройством для обучения или развлечения, сигналы, которые мозг получает от всех сенсорных сигналов тела, должны совпадать.
Операции на симуляторе
[ редактировать ]Для большинства существующих систем физически невозможно правильно смоделировать крупномасштабное движение в ограниченном пространстве, доступном в симуляторе. Стандартный подход заключается в максимально точном моделировании сигналов начального ускорения. [ 16 ]
Линейные движения
[ редактировать ]В принципе, скорость не может быть непосредственно воспринята только с помощью относительных сигналов, как, например, сигналы вестибулярной системы. Для такой системы полет в космосе с некоторой постоянной скоростью ничем не отличается от сидения в кресле. Однако изменение скорости воспринимается как ускорение или сила, действующая на тело человека. В случае постоянного линейного ускорения замена реальной ситуации проста. Поскольку амплитуда ускорения не очень хорошо воспринимается людьми, можно наклонить объект назад и использовать вектор гравитации в качестве замены правильной результирующей силы гравитации и ускорения вперед. В этом случае наклон тренажера назад и поворот зрительной картинки на тот же угол дает испытуемому силу на спине, которая воспринимается как ускорение вперед.
Линейные ускорения [ 17 ]
[ редактировать ]Линейные ускорения обнаруживаются отолитами. Структура отолита проще, чем трехосные полукружные каналы, улавливающие угловые ускорения. Отолиты содержат частицы карбоната кальция, которые замедляют движение головы, отклоняя волосковые клетки. Эти клетки передают информацию о движении в мозг и глазодвигательные мышцы. Исследования показывают, что отолиты обнаруживают тангенциальную составляющую приложенных сил. Модель передаточной функции между воспринимаемой силой и приложенные силы дается:



На основании экспериментов с центрифугой пороговые значения 0,0011 фут/с. 2 было сообщено; значения до 0,4 фута/с 2 были зарегистрированы на основе авиационных исследований в СССР. Те же исследования показывают, что пороговым значением является не линейное ускорение, а скорее рывковое движение (третья производная по времени от положения), а заявленное пороговое значение составляет порядка 0,1 фута/с. 3 . Эти результаты подтверждаются ранними исследованиями, показывающими, что кинематика движений человека представлена характеристиками профилей рывков. [ 18 ]
Угловые ускорения [ 17 ]
[ редактировать ]Угловые ускорения обнаруживаются полукружными каналами. Три полукружных канала взаимно ортогональны (аналогично трехосному акселерометру) и заполнены жидкостью, называемой эндолимфой. В каждом канале есть участок, диаметр которого больше, чем у остальной части канала. Этот отдел называется ампулой и закрыт лоскутом, называемым купулой. Угловые ускорения обнаруживаются следующим образом: угловое ускорение заставляет жидкость в каналах двигаться, отклоняя купулу. Нервы в купуле сообщают о движении как мозгу, так и глазодвигательным мышцам, стабилизируя движения глаз. Модель передаточной функции между воспринимаемым угловым смещением и фактическое угловое смещение является:


Модель угла купулы второго порядка. дается


где коэффициент демпфирования, - собственная частота купулы, а — входное угловое ускорение. Ценности сообщается, что они составляют от 3,6 до 6,7, в то время как значения Сообщалось, что он составляет от 0,75 до 1,9. Таким образом, система перегружена отчетливыми реальными корнями. Более короткая постоянная времени составляет 0,1 секунды, а более длинная постоянная времени зависит от оси, вокруг которой испытуемый ускоряется (крен, тангаж или рысканье). Эти постоянные времени на один-два порядка больше, чем более короткая постоянная времени.



Эксперименты показали, что человек-испытуемый не может обнаружить угловые ускорения ниже определенного уровня. Ценности сообщалось об ускорениях по тангажу и крену в симуляторе полета.

Подразумеваемое
[ редактировать ]Приведенные выше исследования показывают, что вестибулярная система пилота обнаруживает ускорения до того, как их отображают приборы самолета. Это можно рассматривать как внутренний контур управления, в котором пилоты реагируют на ускорения, возникающие в полноподвижных тренажерах и самолетах, но не в стационарных тренажерах. Этот эффект показывает, что существует потенциальный отрицательный перенос обучения при переходе от стационарного тренажера к самолету, и указывает на необходимость использования систем движения для полноценного обучения пилотов.
Физически невозможно точно смоделировать крупномасштабное реальное движение в ограниченном пространстве лаборатории. Стандартный подход к моделированию движения (так называемая сигнализация движения) заключается в максимально точной имитации «релевантных» сигналов, которые запускают восприятие движения . Эти сигналы могут быть визуальными, слуховыми или соматосенсорными по своей природе. Визуальные и слуховые сигналы позволяют человеку воспринимать свое местоположение в пространстве в абсолютном масштабе, тогда как соматосенсорные сигналы (в основном проприоцепция и другие сигналы вестибулярной системы) обеспечивают лишь обратную связь об ускорениях.
Например, рассмотрим поездку в автомобиле, движущемся с произвольной постоянной скоростью. В этой ситуации наше зрение и слух дают единственные сигналы (исключая вибрацию двигателя) о том, что автомобиль движется; На пассажиров автомобиля не действуют никакие другие силы, кроме силы тяжести. Далее рассмотрим тот же пример автомобиля, движущегося с постоянной скоростью, но на этот раз всем пассажирам автомобиля завязаны глаза. Если бы водитель нажал на газ, машина бы ускорилась вперед, прижимая каждого пассажира обратно на сиденье. В этой ситуации каждый пассажир будет ощущать увеличение скорости, ощущая дополнительное давление со стороны подушки сиденья.
Реализация с использованием промывных фильтров
[ редактировать ]Промывочные фильтры являются важным аспектом реализации движущихся платформ, поскольку они позволяют системам движения с их ограниченным диапазоном движения моделировать диапазон моделируемой динамики транспортного средства. человека Поскольку вестибулярная система автоматически центрируется во время устойчивых движений, промывочные фильтры используются для подавления ненужных низкочастотных сигналов и возврата симулятора обратно в нейтральное положение при ускорениях ниже порога человеческого восприятия. Например, пилот в симуляторе движения может выполнять устойчивый горизонтальный разворот в течение длительного периода времени, что потребует от системы оставаться под соответствующим углом крена, но фильтр вымывания позволяет системе медленно вернуться в положение равновесия при скорость ниже порога, который может обнаружить пилот. Это позволяет более высокому уровню динамики компьютерного автомобиля предоставлять реалистичные сигналы для человеческого восприятия, оставаясь при этом в пределах ограничений симулятора. [ 19 ] [ 20 ]
Три распространенных типа промывных фильтров включают классические, адаптивные и оптимальные промывные фильтры. Классический промывной фильтр состоит из линейных фильтров нижних и верхних частот. Сигнал, поступающий в фильтр, разделяется на поступательный и вращательный сигналы. Фильтры верхних частот используются для моделирования переходных поступательных и вращательных ускорений, а фильтры нижних частот используются для моделирования постоянных ускорений. [ 21 ] Адаптивный промывной фильтр использует классическую схему промывного фильтра, но использует механизм самонастройки, которого нет в классическом промывном фильтре. Наконец, оптимальный промывной фильтр учитывает модели вестибулярной системы. [ 20 ]
Классическое представление управления
[ редактировать ]Классический промывной фильтр представляет собой просто комбинацию фильтров верхних и нижних частот ; таким образом, реализация фильтра является совместимо простой. Однако параметры этих фильтров приходится определять эмпирически. Входными данными для классического фильтра вымывания являются силы, специфичные для транспортного средства, и угловая скорость. Оба входных сигнала выражаются в фиксированной системе координат, связанной с кузовом транспортного средства. Поскольку низкочастотная сила доминирует в приведении в движение основы, сила фильтруется высокочастотно и обеспечивает переводы симулятора. Почти такая же операция выполняется и для угловой скорости.
Чтобы определить наклон движущейся платформы, механизм наклона сначала подает низкочастотную составляющую силы для расчета вращения. Затем высокочастотная составляющая «f» используется для ориентации вектора силы тяжести «g» платформы симулятора:

Обычно, чтобы найти положение, фильтр нижних частот (в режиме непрерывного времени) представляется в s-области со следующей передаточной функцией :

Входные данные фильтра верхних частот затем рассчитываются по следующему уравнению:

где являются силовыми входами. Тогда фильтр верхних частот может быть представлен (например) в следующем ряду:


Два интегратора в этой серии представляют собой интегрирование ускорения в скорость и скорости в положение соответственно. , и представляют параметры фильтра. Очевидно, что выходной сигнал фильтра будет исчезать в установившемся режиме, сохраняя положение точек равновесия разомкнутого контура. Это означает, что переходные входы будут «пропускаться», а устойчивые входы — нет, что соответствует требованиям фильтра. [ 22 ]



Существующая практика эмпирического определения параметров в фильтре промывки представляет собой процесс субъективной настройки методом проб и ошибок, посредством которого опытный пилот-оценщик выполняет заранее определенные маневры. После каждого полета впечатление пилота от движения передается эксперту по размывающим фильтрам, который затем корректирует коэффициенты размывающего фильтра, пытаясь удовлетворить пилота. Исследователи также предложили использовать парадигму настройки и фиксировать ее с помощью экспертной системы. [ 23 ]
Нелинейный промывной фильтр
[ редактировать ]Этот промывной фильтр можно рассматривать как результат комбинации адаптивного и оптимального промывного фильтра. Нелинейный подход желателен для дальнейшего максимизации доступных сигналов движения в рамках аппаратных ограничений системы движения, что приводит к более реалистичному восприятию. Например, алгоритм, описанный Дэниелом и Аугусто, вычисляет коэффициент усиления α как функцию состояний системы; таким образом, вымывание варьируется во времени. Выигрыш «α» будет увеличиваться по мере того, как состояния платформы увеличивают свою величину, освобождая место для более быстрого управляющего действия, чтобы быстро вернуть платформу в исходное положение. Противоположный результат возникает, когда величина состояний платформы мала или уменьшается, что продлевает сигналы движения, которые будут поддерживаться в течение более длительного времени. [ 24 ]
Аналогичным образом, работа Телбана и Кардулло добавила интегрированную модель восприятия, которая включает в себя как зрительные, так и вестибулярные ощущения, чтобы оптимизировать восприятие движения человеком. Показано, что эта модель улучшает реакцию пилота на сигналы движения. [ 25 ]
Адаптивный промывной фильтр
[ редактировать ]Этот адаптивный подход был разработан в НАСА в Лэнгли. Он состоит из комбинации эмпирически определенных фильтров, в которых некоторые коэффициенты изменяются заданным образом с целью минимизации заданной целевой (стоимостной) функции. В исследовании, проведенном в Университете Торонто, скоординированный адаптивный фильтр обеспечил «наиболее благоприятные пилотные оценки» по сравнению с двумя другими типами промывных фильтров. Преимущества этого типа промывного фильтра можно резюмировать двумя основными моментами. Во-первых, адаптивные характеристики дают более реалистичные сигналы движения, когда симулятор находится близко к нейтральному положению, а движение уменьшается только на пределе возможностей системы движения, что позволяет лучше использовать возможности системы движения. Во-вторых, функция стоимости или целевая функция (с помощью которой оптимизируется фильтр вымывания) очень гибкая, и к ней можно добавлять различные члены для включения моделей с более высокой точностью. Это позволяет создать расширяемую систему, способную меняться со временем, в результате чего система реагирует наиболее точно на протяжении всего моделируемого полета. Недостатком является то, что поведение сложно настроить, в первую очередь из-за перекрестных каналов. Наконец, время выполнения относительно велико из-за большого количества требуемых вызовов производных функций. Кроме того, по мере введения более сложных функций стоимости соответствующее требуемое время вычислений будет увеличиваться. [ 26 ]
Ограничения
[ редактировать ]Хотя промывные фильтры действительно обеспечивают большую полезность, позволяя моделировать более широкий диапазон условий, чем физические возможности движущейся платформы, существуют ограничения на их производительность и практичность в приложениях моделирования. Фильтры вымывания используют ограничения человеческого восприятия, создавая впечатление более обширной среды моделирования, чем существует на самом деле. Например, пилот в симуляторе движения может выполнять устойчивый горизонтальный разворот в течение длительного периода времени, что потребует от системы оставаться под соответствующим углом крена. В этой ситуации промывной фильтр позволяет системе медленно вернуться в положение равновесия со скоростью ниже порога, который может обнаружить пилот. Преимущество этого заключается в том, что система движения теперь имеет больший диапазон движений, когда пилот выполняет свой следующий маневр.
Такое поведение легко применить в контексте моделирования самолетов с очень предсказуемыми и постепенными маневрами (например, коммерческих самолетов или более крупных транспортных средств). Однако эта медленная, плавная динамика существует не во всех практических средах моделирования и снижает отдачу от промывочных фильтров и системы движения. Возьмем, к примеру, обучение пилотов-истребителей: хотя устойчивый крейсерский режим истребителя можно хорошо смоделировать в рамках этих ограничений, в ситуациях воздушного боя маневры полета выполняются очень быстро, вплоть до физических пределов. В этих сценариях фильтр вымывания не успевает среагировать и вернуть систему движения в равновесие по диапазону, в результате чего система движения быстро достигает ограничений диапазона движения и фактически перестает точно моделировать динамику. Именно по этой причине системы на основе фильтров движения и размыва часто предназначены для тех, кто испытывает ограниченный диапазон условий полета.
Сами фильтры также могут создавать ложные сигналы, определяемые как: 1) сигнал движения в симуляторе, который находится в направлении, противоположном направлению движения в самолете, 2) сигнал движения в симуляторе, когда в самолете ничего не ожидалось, и 3 ) относительно высокочастотное искажение продолжительного сигнала в симуляторе по сравнению с ожидаемым продолжительным сигналом в самолете. В предыдущем определении группируются все ошибки подсказок, которые приводят к очень значительному снижению воспринимаемой точности воспроизведения движения. [ 23 ] Шесть потенциальных источников ложных сигналов:
- Программное или аппаратное ограничение. Когда симулятор приближается к пределу смещения, предусмотрены два метода защиты: 1) программное ограничение и 2) аппаратное ограничение. В любом случае симулятор замедляется, чтобы предотвратить повреждение системы движения. С этим замедлением часто связаны большие ложные сигналы.
- Возврат в нейтральное положение: этот ложный сигнал связан с перерегулированием фильтров верхних частот на входы ступенчатого типа. Этот тип ответа возникает только в том случае, если используются фильтры верхних частот второго или третьего порядка.
- G-наклон
- Угловая скорость координации наклона
- Остаток координации наклона: при длительном приложении удельной силы при раскачивании или волнении симулятор достигнет устойчивого угла тангажа или крена за счет координации наклона. Если входной сигнал резко заканчивается, то реакция удельной силы верхних частот сначала компенсирует удельную силу, связанную с наклоном, но только на короткое время, прежде чем ограниченное смещение симулятора запретит поступательное ускорение симулятора. Если наклон быстро устранить, то произойдет ложный сигнал угловой скорости координации наклона; в противном случае оставшийся наклон создаст ощущение ускорения, называемое ложным сигналом остатка координации наклона.
- Угловое ускорение координации наклона: этот ложный сигнал вызван угловым ускорением, создаваемым координацией наклона, происходящей относительно точки, отличной от головы пилота. Угловое ускорение в сочетании с моментным рычагом, направленным от центра вращения к голове пилота, приводит к возникновению ложного сигнала определенной силы на голове пилота. Точка, вокруг которой моделируются угловые вращения (так называемая опорная точка), обычно находится в центре тяжести рамы верхнего подшипникового блока для систем движения шестиногих.
Влияние
[ редактировать ]Влияние движения в симуляциях и играх [ 2 ] [ 13 ]
[ редактировать ]Использование физического движения в авиасимуляторах было обсуждаемой и исследуемой темой. Инженерный факультет Университета Виктории провел серию тестов в 1980-х годах, чтобы количественно оценить восприятие пилотами авиакомпаний при моделировании полета и влияние движения на среду моделирования. В конце концов было обнаружено, что наблюдалось определенное положительное влияние на то, как пилоты воспринимали среду моделирования, когда присутствовало движение, и почти единодушная неприязнь была к среде моделирования, в которой не было движения. [ 27 ] Вывод, который можно сделать на основе результатов исследования «Ответ пилотов авиакомпаний», заключается в том, что реалистичность моделирования находится в прямой зависимости от точности моделирования на пилоте. Применительно к видеоиграм и оценке игрового процесса реализм может быть напрямую связан с получением удовольствия от игры игроком. Другими словами, игры с поддержкой движения более реалистичны, а значит, более итеративны и более стимулируют. Однако использование движения в симуляции имеет побочные эффекты, которые могут в первую очередь отвлечь от основной цели использования симулятора, например, укачивание . Например, поступали сообщения о том, что военные пилоты теряли вестибулярный аппарат из-за того, что двигали головой на симуляторе так же, как они это делали бы в реальном самолете, чтобы сохранить чувствительность к ускорению. Однако из-за ограничений на ускорение симулятора этот эффект становится пагубным при переходе обратно к реальному самолету.
Побочные эффекты (симуляция болезни)
[ редактировать ]Укачивание или симуляторная болезнь : симуляторы работают, «обманывая» разум, заставляя его поверить в то, что входные данные, которые он получает от зрительных, вестибулярных и проприоцептивных сигналов, представляют собой определенный тип желаемого движения. Когда какой-либо из сигналов, полученных мозгом, не коррелирует с другими, может возникнуть укачивание. В принципе, симуляционная болезнь — это просто форма укачивания, которая может возникнуть в результате несоответствия сигналов от трех входных физических источников. Например, поездка на корабле без окон посылает сигнал вестибулярной системе о том, что тело ускоряется и вращается в различных направлениях, но зрительная система не видит движения, поскольку комната движется так же, как и пассажир. В такой ситуации многие почувствуют укачивание.
Помимо симуляторной болезни, после воздействия симуляции движения наблюдались дополнительные симптомы. Эти симптомы включают чувство тепла, бледность и потливость, депрессию и апатию, головную боль и ощущение полноты головы, сонливость и усталость, трудности с фокусировкой глаз, напряжение глаз, помутнение зрения, отрыжку, трудности с концентрацией внимания и визуальные воспоминания. Затяжные эффекты этих симптомов иногда сохранялись в течение дня или двух после воздействия симулятора движения.
Факторы, способствующие развитию симуляторной болезни
[ редактировать ]Симуляционной болезни способствуют несколько факторов, которые можно разделить на человеческие переменные, использование симулятора и оборудование. Общие человеческие переменные факторы включают в себя восприимчивость, часы полета, физическую форму и прием лекарств/наркотиков. Индивидуальная индивидуальная предрасположенность к морской болезни является доминирующим фактором, способствующим развитию симуляционной болезни. Увеличение продолжительности полета также является проблемой для пилотов, поскольку они все больше привыкают к реальному движению транспортного средства. Факторами, способствующими использованию симулятора, являются адаптация, искаженное или сложное содержимое сцены, большая продолжительность моделирования и заморозка/сброс. Замораживание/сброс относится к начальной или конечной точкам моделирования, которые должны быть как можно ближе к устойчивым и ровным условиям. Очевидно, что если моделирование закончится в середине экстремального маневра, то система IMU испытуемого, скорее всего, будет искажена. Факторами оборудования тренажера, которые способствуют укачиванию, являются качество двигательной системы, качество зрительной системы, внеосевой обзор, плохо настроенная оптика, мерцание и задержка/несоответствие между зрительной и двигательной системами. Проблема задержки/несоответствия исторически была проблемой в технологии симуляторов, где задержка во времени между вводом пилота и системами визуализации и движения может вызвать путаницу и в целом снизить производительность симулятора.
Повышение производительности за счет симуляторов движения
[ редактировать ]Платформы движения могут воспроизводить ощущение реального движения только при начальном ускорении. Его невозможно поддерживать из-за физических ограничений размера движущейся платформы. Однако датчики движения человеческого тела реагируют на ускорения, а не на продолжительное движение, поэтому платформа движения может генерировать сигналы движения. Датчики движения человека состоят из внутреннего уха (вестибулярного аппарата) с тремя полукружными каналами для восприятия вращений и отолитовых органов для восприятия линейных ускорений. Платформы движения Hexapod используются в полнопилотажных тренажерах, которые используются для обучения пилотов гражданской авиации во всем мире в соответствии с правилами Международной организации гражданской авиации (ИКАО) и региональных органов гражданской авиации, таких как EASA. [ нужны разъяснения ] в Европе и ФАУ [ нужны разъяснения ] в США.
Преимущества и недостатки симуляции в обучении
[ редактировать ]Преимущества
[ редактировать ]- Тренажеры представляют собой безопасное средство обучения управлению потенциально опасными летательными аппаратами (например, самолетами).
- Стоимость обучения на реальном оборудовании иногда может превышать стоимость тренажера.
- Время между тренировками может быть сокращено, поскольку это может быть так же просто, как возврат системы движения к исходным условиям.
Недостатки
[ редактировать ]- Реальную окружающую среду нельзя имитировать идентично; поэтому пилот/гонщик может быть сбит с толку отсутствием ожидаемых ощущений или недостаточно подготовлен к реальной обстановке.
- Согласование всех входов датчиков для устранения или, по крайней мере, смягчения риска «симуляторной болезни» может оказаться непростой задачей. [ 28 ]
- Возраст участника, а также количество опыта работы в реальной среде изменяют реакцию на моделируемую среду. [ 28 ]
См. также
[ редактировать ]- Степени свободы (механика)
- Симулятор вождения
- Полноценный гоночный симулятор
- Симулятор полета
- Кинематика
- Симулятор болезни
- Платформа Стюарта
- Вестибулярная система
Ссылки
[ редактировать ]- ^ Jump up to: а б «Движущиеся платформы или подвижные сиденья?» (PDF) . Филип Денн, Transforce Developments Ltd., 1 сентября 2004 г. Архивировано из оригинала (PDF) 31 марта 2010 г. Проверено 21 марта 2010 г.
- ^ Jump up to: а б Шон П. Макдональд (12 июня 2006 г.). «Как физиология человека обрабатывает и реагирует на движение» . Корпорация Симкрафт. Архивировано из оригинала 16 июля 2011 г.
- ^ Роллингс, Эндрю; Эрнест Адамс (2003). Эндрю Роллингс и Эрнест Адамс об игровом дизайне . Издательство «Новые гонщики». стр. 395–415. ISBN 1-59273-001-9 .
- ^ Пейдж, Рэй Л. «Краткая история моделирования полета». В материалах SimTechT 2000 . Сидней: Организационный и технический комитет SimtechT 2000, 2000 г.
- ^ Jump up to: а б с д «Замечательные игры-симуляторы Sega за последние годы» . Аркадные герои . 6 июня 2013 года . Проверено 22 апреля 2021 г.
- ^ Jump up to: а б Горовиц, Кен (6 июля 2018 г.). Революция Sega Arcade: история в 62 играх . МакФарланд и компания . стр. 96–9. ISBN 978-1-4766-3196-7 .
- ^ «Исчезновение Ю Судзуки: Часть 1» . 1Up.com . 2010. с. 2. Архивировано из оригинала 2 июня 2016 г. Проверено 22 апреля 2021 г.
- ^ Лендино, Джейми (27 сентября 2020 г.). Режим привлечения: взлет и падение аркадных игр с монетоприемником . Пресс для стальных шестерен. п. 331.
- ^ «Сообщество XSimulator DIY Motion Simulator» . xsimulator.net. 24 сентября 2013 г.
- ^ Николя А. Пулио; Клеман М. Госслен; Мейер А. Нахон (январь 1998 г.). «Возможности моделирования движения летных тренажеров с тремя степенями свободы». Журнал самолетов . 35 (1): 9–17. дои : 10.2514/2.2283 .
- ^ «Симуляторы» . Архивировано из оригинала 30 сентября 2008 г. Проверено 24 сентября 2008 г.
- ^ «Интерактивный авиасимулятор И-360» . Архивировано из оригинала 3 октября 2008 г. Проверено 24 сентября 2008 г.
- ^ Jump up to: а б с д и «Движущиеся платформы» . Мураббин Флаинг Сервисез. 12 июня 2006 г. Архивировано из оригинала 30 августа 2009 г. Проверено 12 августа 2009 г.
- ^ Барнетт-Коуэн, М.; Харрис, ЛР (2009). «Воспринимаемое время вестибулярной стимуляции относительно прикосновения, света и звука». Экспериментальное исследование мозга . 198 (2–3): 221–231. дои : 10.1007/s00221-009-1779-4 . ПМИД 19352639 . S2CID 16225002 .
- ^ Грант, П; Ли, ПТС (2007). «Движение – визуальное обнаружение фазовой ошибки в авиасимуляторе». J Aircr . 44 (3): 927–935. дои : 10.2514/1.25807 .
- ^ Маркус фон дер Хейде и Бернхард Э. Рике (декабрь 2001 г.). «Как обмануть симуляцию движения - сравнение инженерного подхода и подхода к увлекательной поездке с сигналом движения». CiteSeerX 10.1.1.8.9350 .
{{cite journal}}: Для цитирования журнала требуется|journal=( помощь ) - ^ Jump up to: а б «Аллертон, Д. (2009). Принципы моделирования полета . John Wiley & Sons, Ltd.
- ^ Флэш, Тамар ; Хоган, Невилл (1985). «Координация движений рук: экспериментально подтвержденная математическая модель» . Журнал неврологии . 5 (7): 1688–1703. doi : 10.1523/JNEUROSCI.05-07-01688.1985 . ПМК 6565116 . ПМИД 4020415 .
- ^ Чен, С.Х.; Фу, Л.Д. (2010). «Оптимальная конструкция промывного фильтра для движущейся платформы с бессмысленными и угловатыми маневрами». Труды Американской конференции по контролю : 4295–4300.
- ^ Jump up to: а б Грант, PR; Рид, Л.Д. (1997). «Настройка фильтра размыва движения: Правила и требования». Журнал самолетов . 34 (2): 145–151. дои : 10.2514/2.2158 .
- ^ Спрингер, К.; Гатрингер, Х.; Бремер, Х. (2011). «К концепциям фильтра вымывания для симуляторов движения на базе платформы Стюарта» . Труды по прикладной математике и механике . 11 (1): 955–956. дои : 10.1002/pamm.201110448 .
- ^ Р. Граф и Р. Диллманн, «Активная компенсация ускорения с использованием платформы Стюарта на мобильном роботе», в Proc. 2-й семинар Euromicro по передовым мобильным роботам , Брешия, Италия, 1997 г., стр. 59-64.
- ^ Jump up to: а б Грант, PR; Рид, Л.Д. (1997). «ПРОТЕСТ: Экспертная система для настройки промывных фильтров симулятора». Журнал самолетов . 34 (2): 145–151. дои : 10.2514/2.2158 .
- ^ Дэниел, Б. «Отображение движения в симуляторе вождения Чалмерса: подход к управлению, основанный на оптимизации» (PDF) . Университет Чалмерса . Проверено 14 апреля 2014 г.
- ^ Телбан, Р.Дж. (май 2005 г.). Разработка алгоритма определения движения: человеко-ориентированные линейные и нелинейные подходы (PDF) . Отчет подрядчика НАСА CR-2005-213747.
- ^ Нахон, Массачусетс; Рид, Л.Д. (1990). «Алгоритмы привода движения симулятора - взгляд дизайнера». Журнал управления, контроля и динамики . 13 (2): 356–362. Бибкод : 1990JGCD...13..356N . дои : 10.2514/3.20557 .
- ^ Ллойд Д. Рид; Мейер А. Нахон (июль 1988 г.). «Реакция пилотов авиакомпаний на изменения в алгоритмах движения авиасимулятора». Журнал самолетов . 25 (7): 639–646. дои : 10.2514/3.45635 .
- ^ Jump up to: а б Научно-исследовательский институт поведенческих и социальных наук армии США (апрель 2005 г.). «Введение и обзор исследований болезней на симуляторах» (PDF) .