С переменной частотой диск


Привод с переменной частотой ( VFD или привод на регулируемом частоте , скоростью , переменной , переменного , микроавторан с привод тока привод с скоростью привод регулируемым Управляет скоростью и крутящим моментом , изменяя частоту входной электроэнергии. В зависимости от его топологии , он контролирует связанное напряжение или изменение тока . [ 1 ] [ 2 ] [ 3 ] [ 4 ] [ 5 ]
VFD используются в приложениях от небольших приборов до крупных компрессоров. [ 6 ] Системы, использующие VFD, могут быть более эффективными, чем гидравлические системы , например, в системах с насосами и управлением демпфером для вентиляторов. [ 7 ]
Начиная с 1980 -х годов технология Power Electronics снизила стоимость и размер VFD и обладает улучшением производительности за счет достижений в полупроводниковых переключающих устройствах, топологиях диска, методах моделирования и управления, а также управления оборудованием и программным обеспечением.
с низким и средним напряжением VFD включают топологии AC-AC - AC .
История
[ редактировать ]Проекты с модуляцией пульса модуляции (ШИМ ) . Martti Harmoinen считается изобретателем этой технологии. [ 8 ] [ 9 ] [ 10 ] Strömberg удалось продать идею PWM Drive до Helsinki Metro в 1973 году, а в 1982 году первый Sami Drive Sami10 был введен в эксплуатацию. [ 11 ] [ 12 ] [ 13 ]
Описание и эксплуатацию системы
[ редактировать ]
Привод с переменной частотой-это устройство, используемое в системе привода, состоящей из следующих трех основных подсистем: двигателя переменного тока, сборщика основного привода и интерфейса привода/оператора. [ 2 ] : 210–211 [ 4 ]
Мотор
[ редактировать ]Электродвигатель переменного тока, используемый в системе VFD, обычно представляет собой трехфазный индукционный двигатель . Некоторые типы однофазных двигателей или синхронных двигателей могут быть выгодными в некоторых ситуациях, но, как правило, трехфазные индукционные двигатели являются предпочтительными как наиболее экономичные. Моторы, которые предназначены для работы с фиксированной скоростью, часто используются. Повышенные напряжения напряжения, налагаемые на индукционные двигатели, которые поставляются с VFD, требуют, чтобы такие двигатели были разработаны для определенного назначения на инвертор, в соответствии с такими требованиями, как часть 31 стандарта NEMA MG-1. [ 14 ]
Контроллер
[ редактировать ]Контроллер VFD представляет собой твердотельную систему преобразования электроники электроники, состоящая из трех различных подсистем: выпрямителя преобразователя моста , связи с прямым током (DC) и инвертора. Инвертор -инвертор напряжения (VSI) (см. Подраздел «общие топологии» ниже) являются на сегодняшний день наиболее распространенным типом дисков. Большинство дисков - это диски AC -AC в том смысле, что они преобразуют ввод линии переменного тока в выход инвертора переменного тока. Тем не менее, в некоторых приложениях, таких как обычная шина постоянного тока или солнечные приложения, диски настроены в качестве дисков DC - AC. Самый базовый преобразователь выпрямителя для диска VSI настроен в виде трехфазного, шестиугольного диодного моста с шестью импульсами . В приводе VSI ссылка DC состоит из конденсатора DC преобразователя , который сглаживает выходной сигнал и обеспечивает жесткий вход в инвертор. Это отфильтрованное напряжение постоянного тока преобразуется в квази- синусоидальный выход напряжения переменного тока с использованием активных элементов переключения инвертора. Драйвы VSI обеспечивают более высокий коэффициент мощности и более низкие гармонические искажения , чем контролируемый фазовым источником тока Инвертор (CSI) и инвертор-нагрузки (LCI) (см. Подраздел «Общие топологии» ниже). Контроллер привода также может быть настроен в качестве фазового преобразователя, имеющего однофазный вход преобразователя и трехфазный вывод инвертора. [ 15 ]
Достижения контроллера использовали резкое увеличение уровня напряжения и тока и частоты переключения твердотельных силовых устройств за последние шесть десятилетий. Представлено в 1983 году, [ 16 ] Биполярный транзистор с изолированным воротом (IGBT) за последние два десятилетия стал доминировать в VFD в качестве устройства переключения инвертора. [ 17 ] [ 18 ] [ 19 ]
В приложениях с переменным моментом , подходящими для управления приводом VOLTS-для-HERTZ (V/Гц) характеристики двигателя переменного тока требуют, чтобы величина напряжения выхода инвертора к двигателю была скорректирована в соответствии с требуемым крутящим моментом нагрузки в линейном зависимости V/Гц. Полем Например, для двигателей 460 В, 60 Гц эта линейная зависимость В/Гц составляет 460/60 = 7,67 В/Гц. Несмотря на то, что он подходит в широкомасштабных приложениях, управление V/Гц является неоптимальным в высокопроизводительных приложениях, включающих низкую скорость или требования к динамическому регулированию скорости, позиционирование и обращение с нагрузкой. Некоторые управляющие диски V/Гц также могут работать в квадратичном режиме V/HZ или даже могут быть запрограммированы на специальные многоточечные пути V/HZ. [ 20 ] [ 21 ]
Две другие платформы управления приводом, управление вектором и управление прямым крутящим моментом (DTC), отрегулируйте величину напряжения двигателя, угол от ссылки и частота [ 22 ] Чтобы точно контролировать магнитный поток двигателя и механический крутящий момент.
Хотя космического вектора модуляция ширины импульса (SVPWM) становится все более популярной, [ 23 ] Синусоидальный ШИМ (SPWM) является наиболее простым методом, используемым для изменения напряжения двигателя (или тока (или тока) и частоты приводов. С помощью контроля SPWM (см. Рис. 1), квази-синусоидальный выход с переменной и пульсной шириной изготовлен из пересечений сигнала с зубчатым зубцами с модулирующим синусоидальным сигналом, который является переменным в рабочей частоте, а также в напряжении (или токе ) [ 17 ] [ 24 ] [ 25 ]
Эксплуатация двигателей выше номинальной скорости таблички с фирменной табличкой (базовая скорость) возможна, но ограничена условиями, которые не требуют большей мощности, чем рейтинг таблички с фирменной табличкой. Это иногда называется «ослабление поля» и, для двигателей переменного тока, означает, что они работают с менее чем номинальным V/Гц и выше номинальной скорости таблички с табличкой. Постоянные синхронные двигатели с постоянными магнитами имеют довольно ограниченный диапазон скорости в полевых условиях из-за постоянной связи потока магнита . Ране-роторные синхронные двигатели и индукционные двигатели имеют гораздо более широкий диапазон скорости. Например, индукционный двигатель 100 л.с., 460 В, 60 Гц, 1775 об/мин (4-полюсный), поставляемый 460 В, 75 Гц (6,134 В/Гц), будет ограничен 60/75 = 80% крутящего момента при 125%. скорость (2218,75 об / мин) = 100% мощность. [ 26 ] На более высоких скоростях крутящий момент индукционного двигателя должен быть ограничен дальше из -за снижения отколовшегося крутящего момента [ А ] мотор. Таким образом, номинальная мощность обычно может производиться только до 130–150% от номинальной скорости таблички. Синхронные двигатели раны могут работать на еще более высоких скоростях. В приводах на холминге часто используется 200–300% базовой скорости. Механическая прочность ротора ограничивает максимальную скорость двигателя.

Встроенный . микропроцессор управляет общей работой контроллера VFD Основное программирование микропроцессора предоставляется в качестве недоступной для пользователя прошивки . Пользовательский программирование параметров отображения , переменной и функциональных блоков предоставляется для управления, защиты и мониторинга оборудования VFD, двигателя и управляемого. [ 17 ] [ 27 ]
Базовый контроллер привода может быть настроен, чтобы выборочно включать такие дополнительные компоненты питания и аксессуары следующим образом:
- Подключен вверх по течению от преобразователя - выключатель схемы или предохранители , изоляционный контактор , фильтр EMC , линейный реактор , пассивный фильтр
- Подключено к DC Link - тормозной вертолет , тормозный резистор
- Подключен вниз по течению от инвертора - реактор выпуска, синусоидальный фильтр, фильтр DV/DT. [ B ] [ 29 ]
Интерфейс оператора
[ редактировать ]Интерфейс оператора предоставляет средство для оператора для запуска и остановки двигателя и отрегулировать рабочую скорость. VFD также может контролироваться программируемым логическим контроллером через Modbus или другой аналогичный интерфейс. Дополнительные функции управления оператором могут включать в себя обратную работу и переключение между ручной регулировкой скорости и автоматическим управлением от внешнего сигнала управления процессом . Интерфейс оператора часто включает в себя буквенно -цифровой дисплей или индикативные светильники и счетчики, чтобы предоставить информацию об эксплуатации диска. Клавиатура интерфейса оператора и блок дисплея часто предоставляются на передней части контроллера VFD, как показано на фотографии выше. Дисплей клавиатуры часто можно подключить к кабелю и устанавливать на небольшом расстоянии от контроллера VFD. Большинство также предоставляются терминалами ввода и вывода (ввода/вывода) для подключения кнопок нажатия, переключателей и других устройств интерфейса оператора или сигналов управления. Порт последовательной связи также часто доступен , чтобы позволить VFD настраивать, регулировать, контролировать и управлять с помощью компьютера. [ 17 ] [ 30 ] [ 31 ]
Управление скоростью
[ редактировать ]Есть два основных способа контроля скорости VFD; сетевой или твердый. Networked включает в себя передачу предполагаемой скорости по протоколу связи, такого как Modbus , Modbus / TCP , Ethernet / IP или через клавиатуру, используя последовательный интерфейс Display, в то время как Hardwired включает в себя чистые электрические средства связи. Типичными средствами проводной связи являются: 4-20MA , 0-10VDC или использование внутреннего источника питания 24 В постоянного тока с потенциометром . Скорость также может контролироваться удаленно и локально. Пульт дистанционного управления инструктирует VFD игнорировать команды скорости с клавиатуры, в то время как локальный контроль инструктирует VFD игнорировать внешнее управление и соблюдать только клавиатуру.
Программирование VFD
[ редактировать ]В зависимости от рабочих параметров модели VFD можно запрограммировать с помощью: специального программного обеспечения для программирования, внутренней клавиатуры, внешней клавиатуры или SD -карты. VFD часто блокируют большинство изменений программирования во время работы. Типичные параметры, которые необходимо установить, включают в себя: Информация о табличке моторной таблички, источник ссылки на скорость, источник управления включением/выключением и управление торможением. VFD также обычно предоставляют информацию о отладке, такую как коды разломов и состояния входных сигналов.
Начальное и программное поведение
[ редактировать ]Большинство VFD позволяют включить автоматическое начало. Который приведет к выходу на обозначенную частоту после цикла питания, или после очистки неисправности или после восстановления аварийной остановки (как правило, аварийные остановки являются активной низкой логикой). Одним из популярных способов управления VFD является включение автоматического старта и поместить L1, L2 и L3 в контактора. Приводка на контактор, таким образом, включает диск и имеет его вывод до назначенной скорости. В зависимости от сложности диска, можно разработать множественное автоматическое поведение.
Операция привода
[ редактировать ]
Ссылаясь на сопровождающую диаграмму, приложения для приводов могут быть классифицированы как одноквадрант, двух квадрантов или четырехквадрант; Четыре квадранта диаграммы определяются следующим образом: [ 32 ] [ 33 ] [ 34 ]
- Квадрант I - вождение или автомобильное оборудование, [ 35 ] вперед ускорение квадранта с положительной скоростью и крутящим моментом
- Квадрант II- генерирование или торможение, тормозное торможение- замедляющий квадрант с положительной скоростью и отрицательным крутящим моментом
- Quadrant III - вождение или моторирование, обратный ускорение квадранта с отрицательной скоростью и крутящим моментом
- Квадрант IV-генерирование или торможение, обратное тормозное децилевое квадрант с отрицательной скоростью и положительным крутящим моментом.
Большинство приложений включают одноквадрантные нагрузки, работающие в квадранте I, например, в переменных-точках (например, центробежные насосы или вентиляторы) и некоторые нагрузки с постоянными (например, экструдеры).
Некоторые приложения включают в себя две квадрантные нагрузки, работающие в квадранте I и II, где скорость является положительной, но крутящий момент меняет полярность, как в случае замедления вентилятора, замедляющего быстрее, чем природные механические потери. Некоторые источники определяют два квадрантных диска как нагрузки, работающие в квадрантах I и III, где скорость и крутящий момент являются одинаковой (положительной или отрицательной) полярностью в обоих направлениях.
Определенные высокопроизводительные приложения включают четырехквадрантные нагрузки (кдранты I до IV), где скорость и крутящий момент могут находиться в любом направлении, например, в подъемниках, лифтах и холмистых конвейерах. Регенерация может происходить только в шине DC DC Link, когда напряжение инвертора меньше по величине, чем обратная сторона двигателя , а напряжение инвертора и задний EMF- та же полярность. [ 36 ]
При запуске двигателя VFD изначально применяет низкую частоту и напряжение, что позволяет избежать высокого тока с высоким содержанием нагрузки, связанного с прямым запусками . После начала VFD приложенная частота и напряжение увеличиваются с контролируемой скоростью или увеличиваются для ускорения нагрузки. Этот начальный метод обычно позволяет двигателю разрабатывать 150% своего крутящего момента, в то время как VFD рисует менее 50% от своего номинального тока из сети в низкоскоростной диапазоне. VFD может быть скорректирован, чтобы создать устойчивый 150% стартовый крутящий момент от постоянной стадии до полной скорости. [ 37 ] Тем не менее, моторное охлаждение ухудшается и может привести к перегреву при снижении скорости, так что длительная низкоскоростная работа со значительным крутящим моментом обычно невозможна без отдельно моторизованной вентиляции вентилятора.
С помощью VFD последовательность остановки является как противоположность в качестве начальной последовательности. Частота и напряжение, приложенное к двигателю, увеличиваются с контролируемой скоростью. Когда частота приближается к нулю, двигатель отключается. Небольшое количество тормозного крутящего момента доступно, чтобы помочь замедлить нагрузку немного быстрее, чем остановиться, если бы двигатель был просто отключен и позволил побережье. Дополнительный крутящий момент торможения может быть получен путем добавления тормозной цепи (резистор, контролируемый транзистором) для рассеивания энергии торможения. С выпрямителем с четырьмя квадратами (Active Front-Cond) VFD способен тормозить нагрузку, нанося обратный крутящий момент и внедряя энергию обратно в линию переменного тока.
Преимущества
[ редактировать ]Экономия энергии
[ редактировать ]Многие приложения для нагрузки на двигатель с фиксированной скоростью, которые предоставляются прямо из питания линии переменного тока, могут экономить энергию, когда они работают на переменной скорости с помощью VFD. Такая экономия стоимости энергии особенно выражена в центробежных вентиляционных приложениях с переменным кругом, где крутящий момент и мощность нагрузки варьируются в зависимости от квадрата и куба , соответственно, скорости. Это изменение дает большое снижение мощности по сравнению с операцией с фиксированной скоростью для относительно небольшого снижения скорости. Например, при скорости 63% нагрузка на двигатель потребляет только 25% от полноступенного мощности. Это сокращение соответствует законам о сродстве , которые определяют взаимосвязь между различными переменными центробежной нагрузки.
В Соединенных Штатах, по оценкам, 60–65% электрической энергии используется для подачи двигателей, 75% из которых являются вентиляционные вентиляторы, насос и компрессорные нагрузки. [ 38 ] Восемнадцать процентов энергии, используемой в 40 миллионов двигателях в США, могут быть сэкономили с помощью эффективных технологий повышения энергии, таких как VFD. [ 39 ] [ 40 ]
Только около 3% от общей установленной базы двигателей переменного тока обеспечиваются акциями переменного тока. [ 41 ] Тем не менее, подсчитано, что технология диска используется на целых 30–40% всех недавно установленных двигателей. [ 42 ]
Разбивка потребления энергии в глобальной популяции моторных установков AC, как показано в следующей таблице:
| Маленький | Общее назначение-средний размер | Большой | |
|---|---|---|---|
| Власть | 10 Вт - 750 Вт | 0,75 кВт - 375 кВт | 375 кВт 10000 кВт |
| Фаза, напряжение | 1-ph., <240 V | 3-ph., 200 V to 1 kV | 3-м, от 1 кВ до 20 кВ |
| % Общая моторная энергия | 9% | 68% | 23% |
| Общий запас | 2 миллиарда | 230 миллионов | 0,6 миллиона |
Производительность управления
[ редактировать ]Водыска AC используются для повышения процесса и улучшения качества в ускорении, потоке, мониторинге, мониторинге, давлении, скорости, скорости, температуре, натяжении и крутящем моменте. [ 44 ]
Нагрузки с фиксированной скоростью подвергают мотор на высокий стартовый крутящий момент и всплески тока, которые в восемь раз превышают ток полной нагрузки. Вместо этого AC приводит к постепенному увеличению двигателя до рабочей скорости, чтобы уменьшить механическое и электрическое напряжение, снижение затрат на техническое обслуживание и ремонт, а также продление срока службы двигателя и управляемого оборудования.
Приводы с переменной скоростью также могут запускать двигатель в специализированных схемах для дальнейшего минимизации механического и электрического напряжения. Например, схема S-кривой может быть применена к применению конвейера для более плавного контроля замедления и ускорения, что уменьшает обратную реакцию, которая может возникнуть, когда конвейер ускоряется или замедляет.
Коэффициенты производительности, стремящихся, способствуют использованию DC-дисков в течение AC-дисков, включают такие требования, как непрерывная работа на низкой скорости, четыре квадранта с регенерацией, частыми процедурами ускорения и замедления, и необходимость защищать двигатель для опасной области. [ 45 ] Следующая таблица сравнивает диски переменного тока и постоянного тока в соответствии с определенными ключевыми параметрами: [ 46 ] [ 47 ] [ 48 ]
| Тип диска | Ток | И VFD | И VFD | И VFD | И VFD |
|---|---|---|---|---|---|
| Платформа управления | Тип кисти DC | V/Hz control | Векторный контроль | Векторный контроль | Векторный контроль |
| Критерии управления | Закрытая петля | Открытая петля | Открытая петля | Закрытая петля | Открытая петля w. Hfi^ |
| Мотор | Ток | В | В | В | Внутренний PM |
| Типичное регулирование скорости (%) | 0.01 | 1 | 0.5 | 0.01 | 0.02 |
| Типичный диапазон скорости при постоянном крутящем моменте (%) | 0–100 | 10–100 | 3–100 | 0–100 | 0–100 |
| Мин Скорость при 100% крутящего момента (% базы) | Стоять | 8% | 2% | Стоять | Standstill (200%) |
| Рекомендуется многократная операция | Нет | Да | Нет | Нет | Нет |
| Защита от неисправностей (только слито или неотъемлемое для вождения) | Только слито | Присущий | Присущий | Присущий | Присущий |
| Обслуживание | (Щетки) | Низкий | Низкий | Низкий | Низкий |
| Устройство обратной связи | Тахометр или энкодер | N/a | N/a | Энкодер | N/a |
^ Высокочастотная инъекция
Типы VFD и рейтинги
[ редактировать ]Общие топологии
[ редактировать ]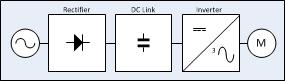


Ак -диски могут быть классифицированы в соответствии со следующими общими топологиями: [ C ] [ 49 ] [ 50 ]
- Топологии привода источника напряжения (VSI) (см. Изображение): На дисков VSI выход DC -диодного преобразователя -моста сохраняет энергию в шине конденсатора для подачи жесткого входа напряжения в инвертор. Подавляющее большинство дисков - это тип VSI с выходом напряжения ШИМ. [ D ]
- Топологии инвертора тока-источника (CSI) (см. Изображение): В дисков CSI выход DC преобразователя SCR -мостового преобразователя сохраняет энергию в подключении индуктора в серии для подачи жесткого тока жесткого тока в инвертор. Приводы CSI могут работать с выводом формы волны SWM или шестиступенчатой формы.
- Шестиэтапные топологии инвертора (см. Изображение): [ E ] [ 51 ] В настоящее время в основном устаревшие, шестиступенчатые диски могут быть типом VSI или CSI, а также упоминаются как инверторные диски с переменным напряжением, приводы модуляции импульсной амплитуды (PAM), [ 52 ] квадратные волны дисков или DC . инвертор [ 53 ] На шестиэтапном приводе выходной выход постоянного тока конвертера мочика Scridge сглаживается через конденсаторскую шину и подключение к серии-реактору с помощью подачи через пару Дарлингтона или IGBT . квази-синусоидального, шестиступенчатого напряжения или тока [ 54 ]
- Нагрузка с перевозкой инверторов (LCI) Топологии привода : в дисков LCI (специальное корпус CSI) выходной сигнал постоянного тока преобразователя моста Scridge сохраняет энергию через цепь индуктора DC для подачи жесткого квазинусоидального шестиэтапного выхода тока второго Инвертор Scridge's Bridge и чрезмерная синхронная машина. Недооцененные синхронные моторные моторные приводы, основанные на SCR-тиристоре [ 55 ]
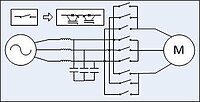
- Топологии циклоконвертера или матрицы (MC) (см. Изображение): Циклоконвертеры и MC являются преобразователями AC -AC , которые не имеют промежуточного канала постоянного тока для хранения энергии. Циклоконвертер работает в качестве трехфазного тока источника через три антипараллельных SCR-Bridges в конфигурации с шестью импульсами, каждая фаза циклоконвертера действует избирательно для преобразования напряжения переменного тока с фиксированной линией в переменную частоту нагрузки. MC Drives основаны на IGBT.
- Топологии системы восстановления вдвойне подаются : система восстановления вдвойне подает вдварилированную систему восстановления скольжения , питает выпрямленную мощность скольжения в реактор сглаживания для подачи питания в сеть питания переменного тока через инвертор, скорость двигателя контролируется путем настройки тока постоянного тока.
Управляющие платформы
[ редактировать ]Большинство дисков используют одну или несколько из следующих платформ управления: [ 49 ] [ 56 ]
Нагрузочный крутящий момент и характеристики мощности
[ редактировать ]Драйвы с переменной частотой также классифицируются с помощью следующего крутящего момента нагрузки и характеристик мощности:
- Переменный крутящий момент, например, в центробежных вентиляторах, насосе и вентиляторе приложения
- Постоянный крутящий момент, например, в приложениях насоса в конвейере и положительного расстояния
- Постоянная мощность, например, в машинном инструменте и тяговых приложениях.
Доступные рейтинги питания
[ редактировать ]VFD доступны с оценками напряжения и тока, охватывающих широкий диапазон однофазных и многофазных двигателей переменного тока. Приводы с низким напряжением (LV) предназначены для работы при выходных напряжениях, равных или менее 690 В. В то время как моторные приложения LV доступны в рейтингах до порядка 5 или 6 МВт, [ 57 ] Экономические соображения, как правило, предпочитают приводы среднего напряжения (MV) с гораздо более низкими рейтингами мощности. Различные топологии привода MV (см. Таблицу 2) настроены в соответствии с рейтингами напряжения/тока, используемых в устройствах переключения контроллеров различных дисководов. [ 58 ] Такова, что любой заданный рейтинг напряжения больше или равен одним до следующих стандартных номинальных рейтингов напряжения двигателя: обычно либо либо 2 + 3 ~ 4,16 кВ (60 Гц) или 3 + 3 ~ 6,6 кВ (50 Гц), с одним производителем тиристора, оцененным до 12 кВ. . шаг В некоторых приложениях между приводом LV и нагрузкой двигателя MV расположен Приводы MV, как правило, рассчитываются на моторные применения, превышающие около 375 и 750 кВт (503 и 1 006 л.с.). Драйвы MV исторически требуют значительно большего усилия по проектированию приложений, чем требуется для приложений LV Drive. [ 59 ] [ 60 ] Рейтинг мощности приводов MV может достигать 100 МВт (130 000 л.с.), ряд различных топологий привода, вовлеченных для различных рейтингов, производительности, качества мощности и надежности. [ 61 ] [ 62 ] [ 63 ]
Поездка на машинах и подробные топологии
[ редактировать ]Наконец, полезно связывать VFD с точки зрения следующих двух классификаций:
- С точки зрения различных машин переменного тока, как показано в таблице 1 ниже [ 64 ] [ 65 ]
- С точки зрения различных подробных топологий конвертера AC -AC, показанных в таблицах 2 и 3 ниже. [ 49 ] [ 50 ] [ 62 ] [ 63 ] [ 66 ] [ 67 ] [ 68 ] [ 69 ] [ 70 ]





Приложения соображения
[ редактировать ]Гармоника линии AC
[ редактировать ]Примечание разъяснения:. [ f ]
В то время как гармоники в выходе ШИМ можно легко фильтровать с помощью индуктивности фильтра, связанной с несущей, для подачи почти синусоидальных токов в двигательную нагрузку, [ 24 ] Выпрямитель диодного моста VFD преобразует напряжение линии переменного тока в выход напряжения постоянного тока путем сверхлинейного нелинейного полуфазного тока импульсов, создавая тем самым искажение гармонического тока и, следовательно, искажение напряжения ввода линии переменного тока. Когда нагрузки VFD относительно невелики по сравнению с большой, жесткой системой питания, доступной в компании электроэнергии , последствия гармонического искажения VFD часто могут быть в приемлемых пределах. Кроме того, в сетях с низким напряжением гармоники, вызванные однофазным оборудованием, таким как компьютеры и телевизоры, частично отменены с помощью трехфазных гармоник диодного моста, поскольку их 5-й и 7-й гармоники находятся в контрфазе. [ 71 ] Однако, когда доля VFD и другой нелинейной нагрузки по сравнению с общей нагрузкой или нелинейной нагрузкой по сравнению с жесткость AC Power Waveform доступна для других клиентов энергетической компании в одной и той же сетке.
Когда напряжение энергетической компании искажается из-за гармоник, увеличиваются потери в других нагрузках, таких как обычные двигатели переменной скорости. Это условие может привести к перегреву и более короткому эксплуатации. Кроме того, подстанции и конденсаторы компенсации влияют негативно. В частности, конденсаторы могут вызвать резонансные условия, которые могут быть неприемлемыми повысить уровень гармоники. Чтобы ограничить искажение напряжения, владельцы нагрузки VFD могут потребоваться для установки фильтрационного оборудования, чтобы уменьшить гармонические искажения ниже приемлемых пределов. В качестве альтернативы, утилита может принять решение, установив собственное фильтрационное оборудование на подстанциях, затронутых большим количеством используемого оборудования VFD. В мощных установках гармоническое искажение может быть уменьшено путем поставки многопульсных выпрямительных мостов из трансформаторов с множественными фазовыми обмотками. [ 72 ]
Также можно заменить стандартный выпрямитель диодного моста на двухнаправленный мост IGBT-устройства, отражающий стандартный инвертор, который использует выходной сигнал IGBT переключающего устройства в двигатель. Такие выпрямители упоминаются различными обозначениями, включая активное преобразователь инфудов (AIC), активный выпрямитель , блок снабжения IGBT (ISU), активный передний конец (AFE) или операция с четырьмя квадратами. С управлением ШИМ и подходящим входным реактором, форма тока тока переменного тока AFE может быть почти синусоидальной. По своей природе регенерирует энергию в четырехквадрантовом режиме со стороны постоянного тока до сетки переменного тока. Таким образом, тормозного резистора не требуется, и эффективность привода улучшается, если привод часто требуется для торможения двигателя.
Два других метода смягчения гармоники используют использование пассивных или активных фильтров, подключенных к общей шине с по меньшей мере одной нагрузкой ветвей VFD на шине. Пассивные фильтры включают в себя конструкцию одного или нескольких ловушек фильтра LC с низким частотой , каждая из которых настраивается, настраиваемая по мере необходимости на гармоническую частоту (5-й, 7-й, 11-й, 13-й, ... KQ +/- 1, где k = integer, q = Импульс номер преобразователя). [ 73 ]
Для энергетических компаний или их клиентов очень распространена практика навязывать границы гармонического искажения на основе стандартов IEC или IEEE . Например, стандартные ограничения IEEE 519 при вызове точки подключения клиента для максимального индивидуального гармоника напряжения частотного напряжения не более 3% от фундаментальных Общая система питания переменного тока. [ 74 ]
Переключение частоты складывания
[ редактировать ]Один диск использует настройку частоты переключения по умолчанию 4 кГц. Сокращение частоты переключения привода (частота несущей) уменьшает тепло, генерируемое IGBT . [ 75 ]
Частота носителя в десять раз более желаемой выходной частоты используется для установления интервалов переключения ШИМ. Частота носителей в диапазоне от 2000 до 16 000 Гц является обычной для LV [низкое напряжение, менее 600 вольт AC] VFD. Более высокая частота носителей приводит к лучшему приближению синусоидальной волны, но в результате нехватки потери переключения в IGBT снижает общую эффективность преобразования мощности. [ 76 ]
Шум сглаживание
[ редактировать ]Некоторые диски имеют функцию сглаживания шума, которую можно включить, чтобы ввести случайное изменение частоты переключения. Это распределяет акустический шум по диапазону частот, чтобы снизить интенсивность пика шума.
Длинные последствия
[ редактировать ]Импульсное напряжение PWM VFD-частота приводит к быстрому мощному напряжению PWM VFD, что следует учитывать. линии трансмиссии Поскольку импеданс кабеля и двигателя различны, импульсы имеют тенденцию отражать обратно от клемм двигателя в кабель. Полученные отражения могут создавать перенапряжения, равные вдвое превышающему напряжение шины постоянного тока, или в 3,1 раза превышает высокое напряжение линии для длинных кабелей, прилагая высокое напряжение на обмотке кабеля и мотор и возможный сбой изоляции. Стандарты изоляции для трехфазных двигателей оценили 230 В или менее адекватно защищены от таких длинных перенапряжений. В системах 460 В или 575 В и инверторов с 3-м поколением 0,1-микросекундного времени IGBT, максимально рекомендуемое расстояние кабеля между VFD и двигателем составляет около 50 м или 150 футов. Для появляющихся приводов SIC MOSFET, значительные перенапряжения наблюдались на длине кабеля на 3 метра. [ 77 ] Решения перенапряжения, вызванные длинной длиной свинца , из 1600 В величины пика), и установка фильтров синусоидальных волн LCR LCR. [ 78 ] [ 79 ] [ 80 ] [ 81 ] Выбор оптимальной частоты носителей ШИМ для акций переменного тока включает в себя сбалансирование шума, тепло, напряжение моторной изоляции, индуцированное общеобразовательным напряжением повреждение тока моторного подшипника, операцию плавного двигателя и другие факторы. Дальнейшее затухание гармоник можно получить с помощью синусоидального фильтра LCR LICE или фильтра DV/DT. [ 82 ] [ 83 ] [ 84 ] [ 85 ]
Моторные токи
[ редактировать ]Частоты носителей выше 5 кГц, вероятно, приведут к повреждению подшипника, если не будут приняты защитные меры. [ 86 ]
Приводы ШИМ по своей природе связаны с высокочастотными напряжениями общего режима и токами, которые могут вызвать проблемы с моторными подшипниками. [ 87 ] Когда эти высокочастотные напряжения находят путь к Земле через подшипник, передача металлической или электрической обработки разряда (EDM) происходит между мячом подшипника и расой подшипника. Со временем спаринг на основе EDM вызывает эрозию в гонке подшипников, которую можно рассматривать как схему флетты. В крупных двигателях бездомная емкость обмотков обеспечивает пути для высокочастотных токов, которые проходят через концы вала двигателя, что приводит к циркулирующему типу подшипника. Плохое заземление моторных статоров может привести к токам подшипника с валом к земле. Небольшие двигатели с плохо заземленным оборудованием подвержены высокочастотным потокам подшипника. [ 88 ]
В профилактике высокочастотного ущерба для тока подшипника используется три подхода: хорошие методы кабеля и заземления, прерывание токов подшипника, а также фильтрация или демпфирование токов общего режима с помощью общих дросселей режима. Хорошая практика кабеля и заземления может включать в себя использование экранированного, симметричного геометрического силового кабеля для снабжения двигателя, установки заземляющих кистей вала и проводящей смазки подшипника. Токи подшипника могут быть прерваны путем установки изолированных подшипников и специально разработанных электростатических индукционных двигателей. Фильтрация и демпфирование высокочастотного подшипника может быть выполнено, хотя вставка мягких магнитных ядер в три фазы, дающие высокочастотный импеданс против общего режима или токов моторного подшипника. Другой подход заключается в использовании вместо стандартных двухуровневых инверторных дисков, используя либо 3-уровневые инверторные диски, либо матричные преобразователи. [ 88 ] [ 89 ]
Динамическое торможение
[ редактировать ]Крутящий момент, генерируемый приводом, заставляет индукционный двигатель работать на синхронной скорости меньше скольжения. Если нагрузка движет двигателем быстрее, чем синхронная скорость, двигатель действует как генератор , преобразуя механическую мощность обратно в электрическую мощность. Эта мощность возвращается в элемент связи DC DC (конденсатор или реактор). Электронный переключатель, подключенный к DC-Link, или тормозной DC CHOPPER COMPORS DISSIPATION этой мощности в качестве тепла в наборе резисторов. Охлаждающие вентиляторы могут использоваться для предотвращения перегрева резисторов. [ 34 ]
Динамическое тормозное травление отпускает энергию торможения, преобразуя ее в тепло. Напротив, регенеративные диски восстанавливают энергию торможения за счет введения этой энергии в линию переменного тока. Капитальные затраты на регенеративные диски, однако, относительно высоки. [ 90 ]
Регенеративные диски
[ редактировать ]

Регенеративные приводы переменного тока имеют способность восстанавливать энергию торможения нагрузки, движущейся быстрее, чем обозначенная скорость двигателя ( капитальная нагрузка) и вернуть ее в систему питания. [ 92 ]
Циклоконвертер, Scherbius, Matrix, CSI и LCI по своей природе позволяет возвращать энергию от нагрузки на линию, в то время как инверторы-источники напряжения требуют дополнительного преобразователя, чтобы вернуть энергию в поставку. [ 93 ] [ 94 ]
Регенерация полезна только в VFD, где стоимость восстановленной энергии велика по сравнению с дополнительными затратами на регенеративную систему, [ 93 ] и если система требует частого торможения и запуска. Регенеративные VFD широко используются там, где требуется управление скоростью капитализации нагрузок. [ 2 ] [ 3 ] [ 95 ]
Некоторые примеры:
- Конвейерные ленты для производства, которые останавливаются каждые несколько минут. Во время остановки детали собираются правильно; Как только это будет сделано, ремень движется дальше.
- Кран, где двигатель подъемника останавливается и часто меняется, и требуется торможение, чтобы замедлить нагрузку во время опускания.
- Подключаемые и гибридные электромобили всех типов (см. Изображение и гибридный синергический привод ).
Смотрите также
[ редактировать ]Примечания
[ редактировать ]- ^ Nema Guide определяет отключенный крутящий момент двигателя как «крутящий момент, который двигатель производит на нулевой скорости при работе при управлении», и крутящий момент двигателя как «максимальный крутящий момент, который он будет развивать с номинальным напряжением, применяемом с номинальной частотой на силовой мощности синетиве. , без резкого падения скорости.
- ^ Математический символ DV/DT, определяемый как производная напряжения V в отношении времени t, обеспечивает меру скорости повышения напряжения, максимально допустимое значение которого выражает способность конденсаторов, двигателей и других пораженных цепи к выдерживают высокие ток или пики напряжения из -за быстрых изменений напряжения; DV/DT обычно экспрессируется в V/микросекунде. [ 28 ]
- ^ Топология определяется на языке Power Electronics как отношения между различными элементами AC Drive.
- ^ Термин ШИМ часто используется для означания VSI-PWM, что вводит в заблуждение, поскольку не только диски VSI связаны с выходом ШИМ.
- ^ Термин «шестиэтап» относится к строго говоря, что вывода формы волны инверторной формы альтернативы SWM, некоторые диски настраиваются в виде комбинированных параметров шестиэтапного и ШИМ.
- ^ Следующее лечение гармоник ограничено по причинам упрощения для дисков LV VSI-PWM.
Ссылки
[ редактировать ]- ^ Кэмпбелл, Сильвестр Дж. (1987). Твердовое управление двигателем переменного тока . Нью -Йорк: Marcel Dekker, Inc. с. 79–189. ISBN 978-0-8247-7728-9 .
- ^ Jump up to: а беременный в Jaeschke, Ralph L. (1978). Управление системами передачи питания . Кливленд, Огайо: Пентон/IPC. С. 210–215. ISBN 978-1114762060 .
- ^ Jump up to: а беременный Сискинд, Чарльз С. (1963). Системы электрического управления в промышленности . Нью-Йорк: McGraw-Hill, Inc. с. 224 ISBN 978-0-07-057746-6 .
- ^ Jump up to: а беременный Публикация стандартов NEMA (2007). Руководство по применению для регулируемых систем скоростного привода переменного тока . Росслин, Вирджиния США: Национальная ассоциация производителей электрики. п. 4 Получено 27 марта 2008 года .
- ^ Локли, Уильям; Паес, Ричард (2014). Что нового в средних дисках напряжения (PDF) . IEEE SAS & NCS 2014 PES/IAS Совместный технический семинар. п. Слайд 91 из 132 . Получено 28 января 2022 года .
Регулируемая система скоростного привода: взаимосвязанная комбинация оборудования, которое обеспечивает средства регулировки скорости механической нагрузки, связанной с двигателем.
Цитата - это определение на с. 4 публикации стандартов NEMA ICS 7.2-2021. - ^ «Интегрированный привод среднего напряжения и двигатель» (PDF) . Energy.gov - Доу .
- ^ «Экономическая эффективность имеет значение» (PDF) . Архивировано из оригинала (PDF) 8 сентября 2017 года . Получено 1 мая 2017 года .
- ^ «Меморандум | Марти Хармиинен 1934-2023» . Хельсингин Саномат (на финском). 20 июня 2023 года . Получено 22 июня 2023 года .
- ^ «Драйв стал отличным инновациями Финляндии - в 2019 году» . Insinoor-lehti.fi (на финском) . Получено 22 июня 2023 года .
- ^ «Suomi100 Innovation, расположенная 5: Офисный конвертер» . etn.fi. Получено 22 июня 2023 года .
- ^ «Пионеры знают, как читать сигналы вокруг них » . Trafiikki (на финском). 14 июня 2021 года . Получено 22 июня 2023 года .
- ^ «Мир технологии» . Teknikanmaailma.fi . Получено 22 июня 2023 года .
- ^ Музей, технология (15 июля 2021 года). «Бодибилдер создает историю технологий и промышленности » . Музей технологий (на финском) . Получено 22 июня 2023 года .
- ^ Нет гида, с
- ^ Кэмпбелл, с. 79–83
- ^ Бозе, Бимал К. (2006). Силовая электроника и моторные диски: достижения и тенденции . Амстердам: академический. п. 22 ISBN 978-0-12-088405-6 .
- ^ Jump up to: а беременный в дюймовый Бартос, Фрэнк Дж. (1 сентября 2004 г.). «Ак -диски остаются жизненно важными для 21 -го века» . Управление инженерией .
- ^ Эйзенброун, Роберт Э. (18 мая 2008 г.). «AC Drive, историческая и будущая перспектива инноваций и роста». Основная доклада для 25 -летия висконсинских электрических машин и консорциума электроники (Wempec) . Университет Висконсина, Мэдисон, Висконсин, США: Wempec. С. 6–10.
- ^ Jahn, Thomas M.; Оуэн, Эдвард Л. (январь 2001 г.). "Ак-регулируемая скорость в тысячелетии: как мы сюда попали?" Полем IEEE транзакции на электронике . 16 (1): 17–25. Bibcode : 2001itpe ... 16 ... 17J . doi : 10.1109/63.903985 .
- ^ «Основы актов AC» . п. Аппаратная часть 2: Слайд 2 из 9. Архивировано из оригинала 19 апреля 2012 года . Получено 18 апреля 2012 года .
- ^ Бозе, Бимал К. (1980). Регулируемая скорость системы привода переменного тока . Нью -Йорк: IEEE Press. Bibcode : 1981asad.book ..... b . ISBN 978-0-87942-146-5 .
- ^ Яно, Масао; и др. «История электроники для моторных дисков в Японии» (PDF) . п. 13. Архивировано из оригинала (PDF) 2 июня 2012 года . Получено 18 апреля 2012 года .
- ^ Бозе, Бимал К. (8 июня 2012 г.). Глобальный энергетический сценарий и влияние на электронику в 21 веке . PEIA 2011 - Семинар по электронике электроники для промышленных применений и преобразования возобновляемых источников энергии. Доха, Катар: IEEE. п. 12 Получено 8 февраля 2012 года .
- ^ Jump up to: а беременный Бозе (2006), с. 183
- ^ Кэмпбелл, с. 82–85
- ^ Бозе (1980), с. 3
- ^ Основы актов AC, с. Программирование: слайд 3 из 7
- ^ «Фильм -конденсаторы - короткое определение терминов» (PDF) . п. 2. Архивировано из оригинала (PDF) 5 сентября 2012 года . Получено 22 мая 2012 года .
- ^ Основы актов AC, с. Аппаратное обеспечение - часть 2: слайд 7 из 9
- ^ Кливленд, Питер (1 ноября 2007 г.). «Ак -регулируемые скоростные приводы». Управление инженерией .
- ^ Кэмпбелл, с. 107–129
- ^ «Техническое руководство № 8 - электрическое торможение» (PDF) . Получено 20 апреля 2012 года .
- ^ «Регенерация энергии» (PDF) . Получено 20 апреля 2012 года .
- ^ Jump up to: а беременный Основы приводов переменного тока, с. Аппаратное обеспечение - Часть 1: слайды 9–10 из 11
- ^ Регенерация энергии, слайд 3
- ^ Регенерация энергии, слайд 6
- ^ Кэмпбелл, с. 95–102
- ^ Бозе, Бимал К. (июнь 2009 г.). «Прошлое, настоящее и будущее электроники». IEEE Industrial Electronics Magazine . 3 (2): 9. doi : 10.1109/mie.2009.932709 .
- ^ Копь, Майк. «Регулируемые скоростные приводы: повышение энергоэффективности» . ChemicalProcessing.com. Архивировано из оригинала 7 октября 2021 года . Получено 27 января 2012 года .
- ^ Бозе, BK (февраль 2009 г.). «Силовая электроника и моторные движения недавнего прогресса и перспективы». IEEE транзакции по промышленной электронике . 56 (2): 581–588. doi : 10.1109/tie.2008.2002726 . S2CID 6139738 .
- ^ «Руководство по переменным скоростным приводам - техническое руководство № 4» (PDF) . Получено 27 января 2012 года .
- ^ Ленденманн, Хайнц; и др. «Моточнее впереди» (PDF) . Получено 18 апреля 2012 года .
- ^ Вайд, Павел; Brunner, Conrad U. (2011). «Возможности политики энергоэффективности для электромоторных систем» (PDF) . Международное энергетическое агентство. Архивировано из оригинала (PDF) 10 августа 2017 года . Получено 27 января 2012 года .
- ^ Основы актов AC, с. Обзор: слайд 5 из 6
- ^ DC или AC-диски « ? п. 11 Получено 22 марта 2012 года .
- ^ «AC и DC переменные скорости применения применения» (PDF) . п. 2. Архивировано из оригинала (PDF) 13 августа 2012 года . Получено 22 марта 2012 года .
- ^ Друри, Билл (2009). Справочник по методам управления приводит к управлению и управлению (2 -е изд.). Стивенэйдж, Хертс, Великобритания: Институт инженерии и технологий. п. 474 . ISBN 978-1-84919-101-2 .
- ^ , . июнь Кан Архивировано из оригинала (PDF) 18 июля 2013 года . Получено 7 сентября 2012 года .
- ^ Jump up to: а беременный в Моррис, Эван; Армитидж, Дэвид. «Руководство по стандартным приводам с переменной скоростью среднего напряжения, часть 2» (PDF) . С. 7–13 . Получено 16 марта 2012 года .
- ^ Jump up to: а беременный Паес, Ричард (июнь 2011 г.). «Обзор регулируемых скоростных приводов AC среднего напряжения и IEEE Std. 1566 - Стандарт для производительности регулируемых скоростных приводов переменного тока, оцененные 375 кВт и больше». Совместное инженерное инженерное общество-Индустриальное применение Техническое семинар . IEEE Южная Альберта Глава: 1–78.
- ^ МакМюррей, Уильям (апрель 1988 г.). «Электронная топология электронной цепи». Труды IEEE . 76 (4): 428–437. doi : 10.1109/5.4428 .
- ^ Кэрроу, Роберт С. (2000). Техническая ссылка электрика: переменные частоты . Олбани, Нью -Йорк: Дельмар Томсон Обучение. п. 51. ISBN 978-0-7668-1923-8 .
- ^ Друри, с. 6
- ^ Сэнди, Уильямс; Бэйли, Аластер; Шипп, Дэвид (2003). Понимание VSD с ESPS - практическим контрольным списком . Общество нефтяных инженеров.
- ^ Wu, B.; Наримани, Мехди (2017). Мощные преобразователи и акции переменного тока (2-е изд.). Хобокен, Нью-Джерси: Wiley-Ieee Press. п. 318. ISBN 9781119156031 Полем 480 страниц, Copyright 2017.
- ^ Друри, с. 6–9
- ^ «ACS800, отдельные диски, каталог от 0,55 до 5600 кВт» (PDF) . АББ промышленные диски . 2013.
- ^ Ву, Бин (2005). «Мощные преобразователи и акции переменного тока» (PDF) . IEEE PES. п. Слайд 22 . Получено 3 февраля 2012 года .
- ^ Бартос, Фрэнк Дж. (1 февраля 2000 г.). «Средний напряжение переменного тока пробует индивидуальное изображение». Управление инженерией .
- ^ Локли, Билл; Вуд, Барри; Паес, Ричард; Dewinter, Фрэнк (январь -февраль 2008 г.). «Стандарт 1566 для (не) знакомых рук». Журнал IEEE Industry Applications . 14 (1): 21–28. doi : 10.1109/mia.2007.909800 . S2CID 16455550 .
- ^ Wu, слайд 159
- ^ Jump up to: а беременный Klug, R.D.; Klaassen, N. (2005). «Средние диски среднего напряжения - инновации, портфель, тенденции». 2005 Европейская конференция по электронике и приложениям . С. 10 с. - П.10. doi : 10.1109/epe.2005.219669 . ISBN 90-75815-09-3 Полем S2CID 15001359 .
- ^ Jump up to: а беременный «Эволюция привода среднего напряжения среднего напряжения» (PDF) . Получено 3 февраля 2012 года .
- ^ Bose (2006) с. Глава 6–8, особенно с. 328, 397, 481
- ^ «Переменная скорость накачка, руководство по успешным приложениям, резюме исполнительной власти» (PDF) . USDOE - Europump - Гидравлический институт. Май 2004 г. с. 9, рис. ES - 7. Архивировано из оригинала (PDF) 27 октября 2011 года . Получено 29 января 2012 года .
- ^ Wu, слайд 159
- ^ Рашид, Мухаммед Х., изд. (2006). Руководство по электронике: устройства, схемы и приложения (2 -е изд.). Берлингтон, Массачусетс: Академический. п. 903 . ISBN 978-0-12-088479-7 .
- ^ Дж. Родригес; Jih-Sheng Lai; Клык Чжэн Пэн (2002). «Многоуровневые инверторы: обзор топологий, контролей и применений». IEEE транзакции по промышленной электронике . 49 (4): 724–738. doi : 10.1109/tie.2002.801052 . HDL : 10533/173647 .
- ^ Иконен, Мика; и др. (2005). «Сравнение двухуровневого и трехуровневого преобразователя в применении ветровой питания» (PDF) . Институт для Elkrafttekkkk . Архивировано из оригинала (PDF) 19 апреля 2009 года.
- ^ Коуро, Самир; Родригес, Хосе; Wu, bin; Бернет, Штеффен; Перес, Марсело (июль -август 2012). «Работа в будущем промышленности: мощный регулируемый скоростный привод». Журнал IEEE Industry Applications . 18 (4): 26–39. doi : 10.1109/mias.2012.2192231 . S2CID 5825955 .
- ^ Янссен, Хансен; Нилсен, Петр; Blaabjerg, Frede (январь - декабрь 2000 г.). «Гармоническая отмена путем смешивания нелинейных однофазных и трехфазных нагрузок». IEEE транзакции в отраслевых приложениях . 36 (1).
- ^ «Руководство по гармоникам с наконечниками AC - Техническое руководство № 6» (PDF) . Абб . 17 мая 2002 года. Архивировано из оригинала (PDF) 26 июня 2011 года . Получено 29 июля 2009 года .
- ^ IEEE Рекомендованные практики и требования к гармоническому управлению в системах электроэнергии . IEEE. doi : 10.1109/ieeestd.1993.114370 . ISBN 978-0-7381-0915-2 .
- ^ IEEE 519, с. 69–70
- ^ ABB ACH550 Частота переключения складки
- ^ D'Aversa, A.; Hughes, B.; Патель, С. (8–11 апреля 2013 г.). Проблемы и решения защиты двигателей с переменным скоростным приводом (PDF) . 2013 66 -я ежегодная конференция для инженеров защитных реле. IEEE. п. 2. doi : 10.1109/cpre.2013.6822040 . , стр. 250-256.
- ^ «Сценарий моделирования DV/DT 1: SIC Drive - DV/DT Моделирование и смягчение» . DV/DT моделирование и смягчение . 16 августа 2018 года . Получено 18 октября 2018 года .
- ^ Skibin, p. 274
- ^ Новак, Петр (1 мая 2009 г.). «Основы дисков с переменной частотой» . EC & M. Архивировано из оригинала 13 апреля 2012 года . Получено 18 апреля 2012 года .
- ^ Финлейсон, PT (январь -февраль 1998 г.). «Выходные фильтры для ШИМ -дисков с индукционными двигателями». Журнал IEEE Industry Applications . 4 (1): 46–52. doi : 10.1109/2943.6444886 . S2CID 25469484 .
- ^ «Моделирование формы сигнала напряжения двигателя - моделирование и смягчение DV/DT» . DV/DT моделирование и смягчение . Получено 18 октября 2018 года .
- ^ Skibinski, G.; Брейт С. (2004). «Линейные и нагрузочные решения для привода для кабелей длинных длины в приложениях для электрических погружных насосов». IEEE Geoscience и буквы дистанционного зондирования . IEEE. С. 269–278. doi : 10.1109/pcicon.2004.1352810 . ISBN 978-0-7803-8698-3 Полем S2CID 8945509 .
- ^ «Приложение отчет о длительном приводе/моторном ходе» . Получено 14 февраля 2012 года .
- ^ Malfait, A.; Reekman, R.; Belmans, R. (1994). «Аудиционный шум и потери в индукционных приводах переменной скорости: влияние конструкции клеток белки и частота переключения». 29 -е ежегодное собрание Службы Общества приложений в отрасли IEEE : 693–700. doi : 10.1109/ias.1994.345435 . S2CID 110917173 .
- ^ "Кто заботится о частоте перевозчика?" (PDF) . Архивировано из оригинала (PDF) 11 июля 2014 года . Получено 15 февраля 2012 года .
- ^ «Минимизировать неблагоприятные и регулируемые взаимодействия с приводом скорости | Расширенная энергоэффективность производства и возобновляемая энергия | Министерство энергетики США» (PDF) .
- ^ Юнг, Чак (2007). «Подшипники и электричество не совпадают» . Plantservices.com [Services] . Итаска, IL: Ptmanmedia: 1–2. Архивировано из оригинала 7 августа 2012 года . Получено 16 апреля 2008 года .
- ^ Jump up to: а беременный «Подшипники в современных системах AC Drive - техническое руководство № 5» (PDF) . Абб . 1 декабря 1999 года. Архивировано из оригинала (PDF) 20 июля 2011 года . Получено 14 июня 2011 года .
- ^ Махеш Свами; Цунео Кум (2008). «Нынешнее состояние и футуристическое видение технологии моторного привода». 11 -я Международная конференция по оптимизации электрического и электронного оборудования . IEEE. С. XLV - LVI, рис. 16. doi : 10.1109/optim.2008.4602333 . ISBN 978-1-4244-1544-1 Полем S2CID 39690131 .
- ^ «Техническое руководство № 8, с. 26–30» (PDF) .
- ^ Олшевский, Митч; и др. (2011). «Оценка системы гибридной электрической дисковой системы Toyota Prius» (PDF) . Национальная лаборатория Оук -Риджа. Архивировано из оригинала (PDF) 24 декабря 2012 года . Получено 26 сентября 2012 года .
- ^ «Reliance Electric Flexpak 3000 20FR4042 | Automation Industrial» . 20FR4042.com . Получено 9 декабря 2023 года .
- ^ Jump up to: а беременный Дубей, Гопал К. (2001). Фульслы электрических дисков (2 изд.). Пангбурн: альфа -наука Int. ISBN 978-1-84265-083-7 .
- ^ Рашид, с. 902, Таблица 33.13
- ^ Кэмпбелл, с. 70–190